代客泊车对HUT功能交互规范
目录
1. 版本记录... 7
2. 文档范围和控制... 8
2.1 目的/范围... 8
2.2 文档冲突... 8
2.3 文档授权... 8
2.4 文档更改控制... 8
3. 系统组成... 9
3.1 IPAS系统(环视和超声波雷达)... 9
3.2 融合泊车系统(环视和泊车)... 10
4. AVM与HUT系统交互... 11
4.1 系统框图... 11
4.2 接口交互需求... 12
4.3 HUT 和AVM上电初始化... 15
4.4 HUT支持AVM输出热插拔功能... 15
4.5 开启/关闭AVM.. 16
4.5.1 状态机... 16
4.5.2 状态描述... 16
4.5.3 状态迁移描述... 17
4.6 AVM画 面 下UI界面... 20
4.6.1 UI界面说明... 20
4.6.2 按键无效情况说明... 22
4.7 HUT与AVM信息交互... 23
4.8 AVM 系统功能设置... 27
4.8.1 AVM界面设置项... 28
4.8.2 3D模式切换设置... 29
4.8.3 智能视角查看模式设置... 30
4.8.4 车辅助线切换设置... 31
4.8.5 MOD功能设置... 32
4.8.6 洗车场模式设置... 33
4.8.7 车模颜色设置... 33
4.8.8 车模透明度设置... 34
4.8.9 智能视角切换功能设置... 35
4.8.10 雷达显示设置... 35
4.8.11 雷达报警音设置... 36
4.9 视图方向显示... 36
4.10 MEB功能状态显示... 36
4.11 2D视图切换... 37
4.12 3D视图旋转功能... 38
4.13 系统设置菜单... 42
4.13.1 雷达设置菜单... 42
4.13.2 AVM设置菜单... 43
4.14 故障显示要求... 46
4.14.1 摄像头故障... 46
4.14.2 引导线失效... 47
4.14.3 车底透明失效... 47
4.14.4 环视系统故障... 47
4.14.5 视频信号超时... 48
4.14.6 系统未标定... 48
4.14.7 系统CAN消息超时... 48
4.14.8 故障优先级... 48
5. PAS与HUT系统交互... 50
5.1 概述... 50
5.2 信号列表... 51
5.3 雷达相关功能开启与关闭... 55
5.4 雷达声音报警... 55
5.5 HAP故障车机处理... 56
5.5.1 雷达系统故障提示... 56
5.5.2 HUT进行雷达报警显示... 57
6. APA与HUT系统交互... 60
6.1 概述... 60
6.2 信号列表... 61
6.3 正常功能HMI界面及控制信号... 64
6.3.1 菜单栏A区域... 64
6.3.2 拼接图B区域... 68
6.3.3 单视图C区域... 69
6.3.4 信息提示D&E区域... 70
6.3.5 泊车图标提示区域F. 70
6.3.6 泊车文字提示区域G.. 70
6.3.7 拼接图H区域... 76
6.4 功能降级HMI界面及控制信号... 78
6.4.1 故障等级说明... 78
6.4.2 菜单栏A区域... 79
6.4.3 拼接图B区域... 79
6.4.4 单视图C区域... 81
6.4.5 信息提示D&E区域... 81
6.4.6 泊车图标提示F区域及文字提示G区域... 81
6.4.7 拼接图H区域... 82
6.5 功能安全要求信号的处理... 84
7. 倒车辅助系统交互... 85
7.1 概述... 85
7.2 信号列表... 85
7.3 显示要求... 87
7.3.1 菜单栏A区域... 87
7.3.2 拼接图B区域... 87
7.3.3 泊车图标提示F区域及文字提示G区域... 87
8. 探索前进系统交互... 88
8.1 概述... 88
8.2 信号列表... 88
8.3 显示要求... 90
8.3.1 菜单栏A区域... 90
8.3.2 拼接图B区域... 90
8.3.3 泊车图标提示F区域及文字提示G区域... 90
9. P2P与HUT系统交互... 91
9.1 概述... 91
9.2 信号列表... 91
9.3 HMI界面及控制信号... 92
9.3.1 菜单栏A区域... 92
9.3.2 拼接图B区域... 93
9.3.3 泊车图标提示F区域及文字提示G区域... 97
9.3.4 拼接图H区域... 97
10. 交互过程定义... 98
10.1 按钮行为定义... 98
10.1.1 按键单击... 98
10.1.2 屏幕点击或拖动... 98
10.2 按键CAN信号定义... 98
10.2.1 单击信号... 98
10.2.2 屏幕点击或拖动信号... 99
| 版本 | 日期 | 作者 | 变更内容 | 审核人 |
| V1.0 | ||||
本文档的读者对象包括项目管理人员、设计开发人员、测试人员、质量保证人员和文档编写人员。本文档用于给上述人员提供完整、正确、可行而且必要的全景环视系统技术规范,同时为项目管理提供指导,设计和开发工作提供依据,为测试工作提供基准。
当本规范与其它参考文档产生冲突,应参照以下描述的优先级顺序,当按照上述顺序冲突不能被消除时,需由本项目供应商的系统工程师或项目经理来解决。
适用的优先级顺序:
- 采购订单
- 本规范
- 其它参考文档
主机厂和供应商的系统工程师共同负责对本文档的授权。任何关于设计需求和技术规范的更改必须得到主机厂和供应商的认可。
- 本规范首个版本发布后,供应商系统工程师将根据实际需要负责对该文档的修改和版本更新。
- 系统组成
- 代客泊车系统
AVP控制器与关联ECU的所有信号交互均通过高速CAN网络、100Base-T1以太网传递。系统架构概括如下(最终以相应车型实际网络拓扑为准)
AVM与HUT建立交互需要满足以下基本要求:
- AVM采用串行器MAX96717F,输出视频数据格式为RBG888,视频分辨率1760*720,其中700*720区域为全景视图区域,1050*720为单视图或3d视图区域。
- HUT对本解串器MAX96718[MO用1] 硬件和软件配置进行初始化;
- HUT主机的POC网络不向同轴进行供电;
- AVM端串行器MAX96717F通过自身外围硬件配置进行初始化;
- HUT端对MAX96718进行初始化配置并与MAX96717F适配;
- HUT与AVM通过车身CAN总线进行信息交互;
- HUT作为I2C主设备端,配置地址为???[Y2] ;AVM作为I2C从设备端,其串行器MAX96717F配置地址为0X80(默认);
- 配置过程如下:
- AVM通过I2C初始化MAX96717F,配置GMSL2并可自动出图;
- HUT对MAX96718进行配置, MAX96718接MAX96717F需要配置的寄存器主要涉及MIPI lane数(0x331),Video stream ID(0x5B), 数据格式(0x318),独立地址分配(0x00,0x42-0x46),GPIO口控制外部,输出外部需要的时钟;
AVM在初始化时对串行器MAX96717F进行配置;HUT在初始化时,对解串器MAX96718进行配置以匹配MAX96717F设置,实现视频信道通路建立。
- 硬件配置表;
- MAX96718的I2C配置地址为???[Y4] ;
- MAX96717F的I2C配置地址为0X80;
- HUT对解串器进行硬件初始化配置,在上电10S前关闭透传开关(0xB04,D[1:0];0xC04,D[1:0]);[Y5]
- AVM对串行器进行硬件初始化配置;
- 通过CAN实现AVM与HUT视频显示同步;
- HUT对触摸屏进行初始化配置,要求AVM影像正常显示时触摸屏可正常操作;
- HUT通过CAN把触摸屏信息发送给AVM;
数字高清传输建立需要发送/接收通道配置方可建立信道。在实际应用中,由于物理中断或高频干扰而造成信号中断,需要HUT端完成视频接收锁定,即实现热插拔功能。
美信解串器MAX96718采用寄存器配置方式以匹配MAX96717F设置建立信道,则需要HUT端对信道建立状态做出判定;若信道建立过程中发生某种异常而导致信道无法建立,需要HUT主机能够重新激发配置和视频接收锁定,多次配置和视频接收锁定(具体次数由三方协商确认)后仍无信号则认为是故障,需要发出HAP无视频输入的故障(DetVideoLost = 1: AVM video lost)。
-
- 开启/关闭AVM
- 状态机
- 开启/关闭AVM
-
-
- 状态描述
-
| 状态 | 状态描述 |
| AVM_Standby | |
| AVM_Failed | |
| AVM_Active | |
| AVM_Full | |
| AVM_TurnOn | |
| AVM_Cal |
-
-
- 状态迁移描述
-
| 条件名称 | 离开条件 |
| C1/C8 | |
| C2/C4/C6/C14 | |
| C3/C10 | |
| C5/C12 | |
| C7 | |
| C9 | |
| C11 | |
| C13 | |
| C15 | |
| C16 | |
| C17/C19 | |
| C18 | |
| C20 |
备注:①当处在AVM_Full状态时,用户触摸A区域返回键,HUT发送BackReq_AVM = 1(Request)给BCM,BCM接收到该信号后发送PASWorkCmd = 0。HUT及HAP依此信号处理。
②当PASWorkCmd=0时,HUT接收到语音请求开启AVM界面时,发送PASSwtReq_VR = 0x2: on给BCM,BCM根据当前车速状态判断是否发送PASWorkCmd=1开启AVM。
AVM界面下,当AVM_CurrSts = 0时,若HUT检测到视频信号,则显示AVM视频;若HUT未检测到视频信号,则显提示“视频载入中”。
接收到PASWorkCmd =1 或HAP_DispCmd =1或HAP_Hmi_Index=2(EOL/Test),则开启环视显示,切换AVM界面。三个信号,HUT判断的优先级如下:
- 先判断HAP_Hmi_Index值,若HAP_Hmi_Index=2,表明HAP处于标定界面。此时HUT应显示AVM界面,A区域按键无效,视角切换按键无效;标定时,HUT不响应PAS按键,标定结束后根据PASWorkCmd 及HAP_DispCmd的值判断是否关闭AVM画面;
- 再判断PASWorkCmd,若PASWorkCmd =1,表明HAP处于正常开启界面。此时HUT应显示AVM界面,A区域按键及视角切换按键动作参照以下章节;此时允许HAP发送HAP_DispCmd =1,但HUT不响应HAP_DispCmd信号;
- 最后判断HAP_DispCmd,若HAP_DispCmd =1,表明HAP处于转向灯开启功能。此时应显示AVM界面,A区域按键无效,视角切换按键无效。
以上条件都不满足,则HUT关闭环视显示。
若启动正常则进行信道建立和视频传输,再通过CAN总线向HUT发送启动状态信息;若启动异常则进行故障处理,参照参考4.14.4、4.14.5进行故障提示。
HAP进入或退出标定模式,HUT退出/显示AVM界面;
| HAP_Hmi_Index指令 | AVM行为 | HUT显示界面 |
| 标定模式 (HAP_Hmi_Index=2) | ||
| 保持故障状态 | ||
| 非标定模式 (HAP_Hmi_Index!=2) | ||
| 备注: 具体逻辑功能依车厂定义实施。 | ||
收到PAS关闭/开启显示命令后,HUT退出/显示AVM界面,内容根据HAP_Hmi_Index确定,如图6所示;
| PAS指令 | AVM行为 | HUT显示界面 |
| 开启显示 (PAS ON) | ||
| 保持故障状态 | ||
| 关闭显示 (PAS OFF) | ||
| 备注: 具体逻辑功能依车厂定义实施。 | ||
收到HAP_DispCmd 开启/关闭显示命令后,HUT显示/退出显示界面,界面内容根据HAP_Hmi_Index确定;
| HAP指令 | HAP行为 | HUT显示界面 |
| 开启显示 (HAP_Disp ON) | ||
| 保持故障状态 | ||
| 关闭显示 (HAP_Disp OFF) | ||
| 备注: 具体逻辑功能依车厂定义实施。 | ||
-
- AVM画面下UI界面
- UI界面说明
- AVM画面下UI界面
AVM画面正常显示中,各区域UI分布如下图,B区域的车辆图标、拼接图、C区域的图像由HAP输出图像,I区域的MOD报警提示,A区域的按键, D区域的MEB状态图标, E区域的文字提示,G区域的雷达故障提示、J区的视图方向图标以及B区域上叠加的按键由HUT实现。APA、P2P等辅助功能未开启时H区无按键,辅助功能开启时H区按键见下面几个章节。
点开后显示二级菜单,在二级菜单中点击开相应小图标显示对应的选项,当在二级菜单或子菜单的选项下点击设置图标,应退出设置菜单。
注:打开设置菜单后,无论触摸任何区域,HUT不在发送XLvl、YLvl坐标信息。
-
-
- 按键无效情况说明
- A区域
- 按键无效情况说明
-
- 当发生以下任一情况时,A区域置灰,所有按键无效,触摸该区域HUT不发送任何指令;设置按键不能被打开:
- 当PASWorkCmd ≠ 1;
- HAP_Hmi_Index = 2(EOL/Test);
- 当以上条件不满足时,则A区域“返回”键有效。若AVM_CurrSts=0(初始化中或未开启AVM界面),则A区域除“返回”键外,其它按键都无效;
- 当以上条件不满足时,发生以下任一情况时,AVM功能相关按键(智能视角查看、洗车场模式、智能视角切换、MOD、2D/3D模式切换、
车模颜色切换、车模透明度切换、车辅助线模式切换及雷达显示模式切换)都无效,触摸该区域HUT不发送任何指令:
- AVM_CurrSts ≠1;
- SigViewIndcn = 0或0x3F;
- HAP_Hmi_Index≠1;
- DetVideoLost = 1
- 当以上条件不满足时,当车速大于10km/h时,A区域除智能视角查看模式及洗车场模式按键有效,其它AVM功能相关按键都无效;设置按键不能被打开;
- 当产生雷达故障时,A区域泊车相关按键(APA开关、P2P、倒车辅助、探索前进)无效,泊车相关按键其它无效情况见下面泊车章节。
-
-
-
- B区域
-
-
- 当发生以下任一情况时, B区域视角按键不显示;触摸该区域HUT不发送任何指令:
- PASWorkCmd ≠ 1;
- HAP_Hmi_Index≠1;
- AVM_CurrSts ≠1;
- SigViewIndcn = 0或0xFF;
- DetVideoLost = 1;
- 车速大于10km/h
- HUT处于AVM界面时,点击或拖动屏幕B或C区域,HUT发送屏幕点击状态和坐标信号,HAP根据当前情况决定是否处理该信号。
全景系统的界面操作在HUT触摸屏上实现。用户进行触碰屏幕操作,HUT主机将触摸操作行为指令通过CAN总线发送给AVM主机。AVM主机通过CAN 总线接收触摸屏操作指令,根据操作指令执行相应的操作。
参考CAN信息列表,消息及格式由车厂最终定义实施。
| 信号名称 | 发送方 | 信号说明 | 替代值 |
当满足设置按键打开条件(具体条件见4.6.2 按键无效情况说明)时,点击设置图标,弹出以下对话框
根据不同的配置,设置项和A区域按键内容不同,需要HUT根据配置字自动识别并按照要求显示:
相关文章:

代客泊车对HUT功能交互规范
目录 1. 版本记录... 7 2. 文档范围和控制... 8 2.1 目的/范围... 8 2.2 文档冲突... 8 2.3 文档授权... 8 2.4 文档更改控制... 8 3. 系统组成... 9 3.1 IPAS系统(环视和超声波雷达)...…...

mysql的update_time
CREATE TABLE users (id INT AUTO_INCREMENT PRIMARY KEY,name VARCHAR(50) NOT NULL,age INT,update_time TIMESTAMP NULL DEFAULT CURRENT_TIMESTAMP ON UPDATE CURRENT_TIMESTAMP COMMENT 更新时间 );具体解释如下: DEFAULT CURRENT_TIMESTAMP: 这部分表示当插入…...

避免安装这5种软件,手机广告频繁弹窗且性能下降
在我们使用手机的日常生活中,选择合适的应用软件对于保持良好的使用体验至关重要。然而,有些软件可能会给我们带来不必要的麻烦和困扰。特别是那些频繁弹窗广告、导致手机性能下降的应用程序,我们应该尽量避免安装它们。 首先第一种…...

kafka-事务
1. 事务的5个API // 1初始化事务 void initTransactions();// 2开启事务 void beginTransaction() throws ProducerFencedException;// 3在事务内提交已经消费的偏移量(主要用于消费者) void sendOffsetsToTransaction(Map<TopicPartition, OffsetAn…...
【安装】阿里云轻量服务器安装Ubuntu图形化界面(端口号/灰屏问题)
阿里云官网链接 https://help.aliyun.com/zh/simple-application-server/use-cases/use-vnc-to-build-guis-on-ubuntu-18-04-and-20-04 网上搜了很多教程,但是我没在界面看到有vnc连接,后面才发现官网有教程。 其实官网很详细了,不过这里还是…...

Python 扩展 快捷贴士:os模块下的创建目录的方式
Python3 os.makedirs() 方法 概述 os.makedirs() 方法用于递归创建多层目录。 如果子目录创建失败或者已经存在,会抛出一个 OSError 的异常,Windows上Error 183 即为目录已经存在的异常错误。 如果第一个参数 path 只有一级,即只创建一层目…...
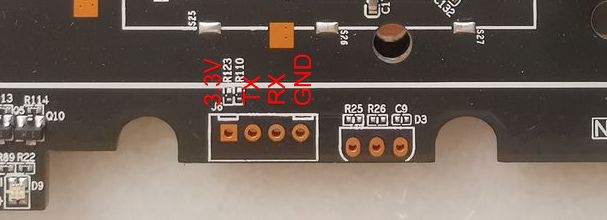
Hi3798MV200 恩兔N2 NS-1 (一): 设备介绍和刷机说明
目录 Hi3798MV200 恩兔N2 NS-1 (一): 设备介绍和刷机说明Hi3798MV200 恩兔N2 NS-1 (二): HiNAS海纳思使用和修改Hi3798MV200 恩兔N2 NS-1 (三): 制作 Ubuntu rootfsHi3798MV200 恩兔N2 NS-1 (四): 制作 Debian rootfs 介绍 恩兔N2是一个家庭存储的系列产品, NS-1 是其中体积…...
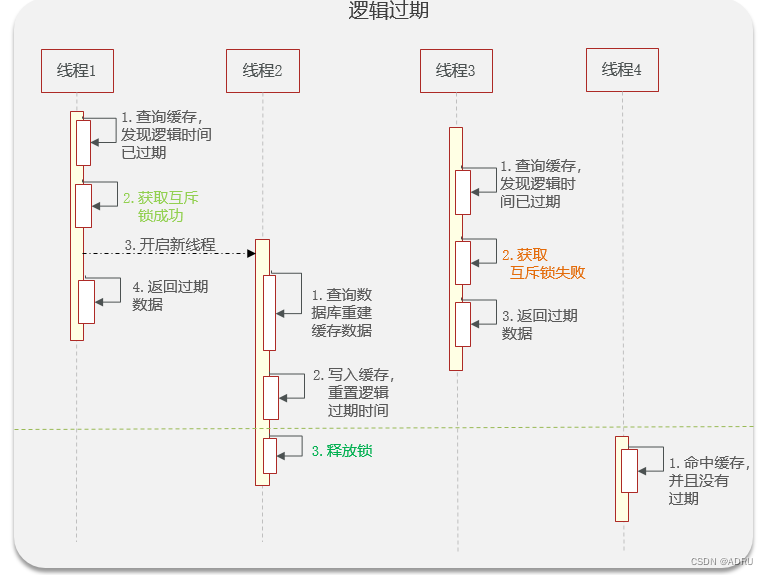
redis缓存雪崩和缓存击穿
目录 缓存雪崩 解决方案: 缓存击穿 解决方案 缓存雪崩 缓存雪崩是指在同一时段大量的缓存key同时失效或者Redis服务宕机,导致大量请求到达数据库,带来巨大压力。 解决方案: u 给不同的 Key 的 TTL 添加随机值 u 利用 Redis …...
计算机网络(5) --- http协议
计算机网络(4) --- 协议定制_哈里沃克的博客-CSDN博客协议定制https://blog.csdn.net/m0_63488627/article/details/132070683?spm1001.2014.3001.5501 目录 1.http协议介绍 1.协议的延申 2.http协议介绍 3.URL 4.urlencode和urldecode 2.HTTP协…...

ubuntu 硬盘操作
查看移动硬盘的文件系统名 以及空间使用情况 df -hl查看硬盘的格式类型,以及挂载位置 df -T挂载硬盘 fdisk -l #查看磁盘信息 mount -o rw /dev/sdb1 /home/test # 挂载硬盘-o 指定挂载文件系统时的选项 ro 以只读方式挂载 rw 以读写方式挂载 注意:…...
和Dispose)
C#垃圾回收器GC、析构函数(Finalize 方法)和Dispose
1、垃圾回收器GC GC(Garbage Collection)是.NET中的垃圾回收器。以应用程序的root为基础,遍历应用程序在Heap上动态分配的所有对象,通过识别它们是否被引用,来确定哪些对象是已经死亡的,哪些仍需要被使用。已经不再被…...

第20周 服务容错-Hystrix
RabbitMQ 安装 1. 首先在Linux上进行一些软件的准备工作,yum下来一些基础的软件包 yum install build-essential openssl openssl-devel unixODBC unixODBC-devel make gcc gcc-c kernel-devel 2. 下载RabbitMQ所需软件包(本神在这里使用的是 RabbitM…...

浏览器不同源的页面之间如何跨域通信
目录 1,需求2,难点3,思路浏览器不同源的页面之间如何跨域通信? 4,实现第1版第2版最终版其他的问题1,页面路径需完全一致。2,事件注册问题 1,需求 现在有2个项目,页面路径…...
【云原生】K8S二进制搭建三:高可用配置
目录 一、部署CoreDNS二、配置高可用三、配置负载均衡四、部署 Dashboard 一、部署CoreDNS 在所有 node 节点上操作 #上传 coredns.tar 到 /opt 目录中 cd /opt docker load -i coredns.tar在 master01 节点上操作 #上传 coredns.yaml 文件到 /opt/k8s 目录中,部…...

HOT78-跳跃游戏
leetcode原题链接:跳跃游戏 题目描述 给定一个非负整数数组 nums ,你最初位于数组的 第一个下标 。数组中的每个元素代表你在该位置可以跳跃的最大长度。 判断你是否能够到达最后一个下标。 示例 1: 输入:nums [2,3,1,1,4] 输…...
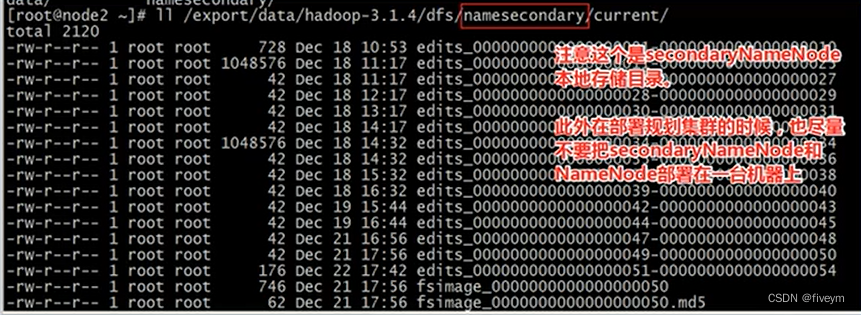
HDFS中的NAMENODE元数据管理(超详细)
元数据管理 元数据是什么元数据管理概述内存元数据元数据文件fsimage内存镜像文件edits log编辑日志 namenode加载元数据文件顺序 元数据管理相关目录文件元数据相关文件VERSIONseen_txid 元数据文件查看(OIV,OEV)SecondaryNameNode介绍checkpoint机制SN…...
区块链实验室(14) - 编译FISCO-BCOS
FISCO-BCOS是一种区块链平台,与Hyperledger和Ethereum有些不同,详见FISCO BCOS 区块链 编译FISCO BCOS源码的目的是修改或者新增其中功能模块,进行对比实验,验证新想法、新创意的效果。编译的步骤很简单,按技术文档一…...
 及 for(auto iter:vec) 的典型用法)
for(auto iter:vec) 及 for(auto iter:vec) 的典型用法
【算法知识点】C11 标准引入了 auto 类型说明符。它通过变量的初始值或者表达式中参与运算的数据类型来推断变量的类型。 一、for(auto iter:vec) 的典型用法 #include <bits/stdc.h> using namespace std;int main(){string s;cin>>s;for(auto t:s){cout<<…...

【iosH5开发】IOS浏览器对于Vue3 Element-plus el-input中,input.value.focus无法聚焦问题
【iosH5开发】IOS浏览器对于Vue3 Element-plus el-input中,input.value.focus无法聚焦问题 此次项目遇到了两个问题,一个是在Vue3中el-input的input.value.focus()无法触发,但是在PC或者安卓均可触发。 // 解决方案 // 单纯的触发input.val…...

【2023】华为OD机试真题Java CC++ Python JS Go-题目0257-增强的strstr
题目0257-增强的strstr 题目描述 C 语言有一个库函数: char *strstr(const char *haystack, const char *needle) ,实现在字符串 haystack 中查找第一次出现字符串 needle 的位置,如果未找到则返回 null。 现要求实现一个strstr的增强函数,可以使用带可选段的字符串来模…...

MaterialSkin终极指南:10分钟让WinForms应用焕然一新
MaterialSkin终极指南:10分钟让WinForms应用焕然一新 【免费下载链接】MaterialSkin Theming .NET WinForms, C# or VB.Net, to Googles Material Design Principles. 项目地址: https://gitcode.com/gh_mirrors/mat/MaterialSkin 你是否厌倦了传统WinForms应…...

别再乱配了!Modbus Slave模拟器与iPlat点表地址映射的保姆级避坑指南
Modbus Slave模拟器与工业平台联调实战:从地址映射原理到批量读取优化 工业物联网项目中,Modbus协议作为最常用的数据采集标准,其配置过程看似简单却暗藏玄机。我曾亲眼见过一个资深工程师花了三天时间排查数据采集失败问题,最终发…...

函数依赖的核心概念解析[数据库原理]
函数依赖的定义与核心概念 函数依赖(Functional Dependency,简称FD)是关系数据库理论中用于描述属性间数据约束的核心概念。它定义了一个关系模式(Relation Schema)中,一个属性(或属性组&#…...

3大核心优势解析:APK Installer如何彻底改变Windows安装Android应用体验
3大核心优势解析:APK Installer如何彻底改变Windows安装Android应用体验 【免费下载链接】APK-Installer An Android Application Installer for Windows 项目地址: https://gitcode.com/GitHub_Trending/ap/APK-Installer 在Windows系统上运行Android应用的…...
:事件模型与五大类操作(文件/注册表/进程/网络/Profiling)
《Windows Sysinternals实战指南》Process Monitor 学习笔记(5.2):事件模型与五大类操作(文件/注册表/进程/网络/Profiling
🔥个人主页:杨利杰YJlio❄️个人专栏:《Sysinternals实战教程》《Windows PowerShell 实战》《WINDOWS教程《IOS教程》《微信助手》《锤子助手》 《Python》 《Kali Linux》 《那些年未解决的Windows疑难杂症》🌟 让复杂的事情更简…...

深度解析Py-ART雷达数据处理:从数据校正到高级反演的全流程实战
深度解析Py-ART雷达数据处理:从数据校正到高级反演的全流程实战 【免费下载链接】pyart The Python-ARM Radar Toolkit. A data model driven interactive toolkit for working with weather radar data. 项目地址: https://gitcode.com/gh_mirrors/py/pyart …...

从算法理想向工程现实的跨越:SLAM 核心架构、思维误区与 Nav2 实战避坑指南
前言:直面 SLAM 的“先有鸡还是先有蛋” 在机器人领域,SLAM(Simultaneous Localization and Mapping,同时定位与地图构建) 毫无疑问是最耀眼的明珠之一。简单来说,它的核心任务就是让一个机器人在未知环境中…...

ComfyUI-Impact-Pack V8架构演进:模块化设计与智能内存管理突破
ComfyUI-Impact-Pack V8架构演进:模块化设计与智能内存管理突破 【免费下载链接】ComfyUI-Impact-Pack Custom nodes pack for ComfyUI This custom node helps to conveniently enhance images through Detector, Detailer, Upscaler, Pipe, and more. 项目地址:…...

openCode 是什么?你电脑里常驻的 AI 开发搭档
凌晨一点,你正在改一个棘手的 Bug。 控制台里报错信息刷了一屏,你盯着那段陌生的代码——是上周同事写的,没注释,没文档。你下意识选中代码,复制,打开浏览器,粘贴到 ChatGPT 的对话框里。 等等。…...

如何通过内存注入技术在英雄联盟国服实现安全换肤?
如何通过内存注入技术在英雄联盟国服实现安全换肤? 【免费下载链接】R3nzSkin-For-China-Server Skin changer for League of Legends (LOL) 项目地址: https://gitcode.com/gh_mirrors/r3/R3nzSkin-For-China-Server 想象一下,你正在峡谷中奋战&…...