Opencv-C++笔记 (16) : 几何变换 (图像的翻转(镜像),平移,旋转,仿射,透视变换)
文章目录
- 一、图像平移
- 二、图像旋转
- 2.1 求旋转矩阵
- 2.2 求旋转后图像的尺寸
- 2.3手工实现图像旋转
- 2.4 opencv函数实现图像旋转
- 三、图像翻转
- 3.1左右翻转
- 3.2、上下翻转
- 3.3 上下颠倒,左右相反
- 4、错切变换
- 4.1 实现错切变换
- 5、仿射变换
- 5.1 求解仿射变换
- 5.2 OpenCV实现仿射变换
- 5.3手动
- 6、图像缩放
- 6.1 实现图像缩放
- 7.透视变换
- 7.2 实现透视变换
一、图像平移
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp"
#include<ctime>
#include<iostream>using namespace cv;
using namespace std;//平移操作,图像大小不变
Mat imageTranslation1(Mat& srcImage, int x0ffset, int y0ffset)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size(), srcImage.type());//遍历图像for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){int x = j - x0ffset;int y = i - y0ffset;//边界判断if (x >= 0 && y >= 0 && x < nCols && y < nRows){resultImage.at<Vec3b>(i, j) = srcImage.ptr<Vec3b>(y)[x];}}}return resultImage;
}
//平移操作,图形大小改变
Mat imageTranslation2(Mat& srcImage, int x0ffset, int y0ffset)
{//设置平移尺寸int nRows = srcImage.rows + abs(y0ffset);int nCols = srcImage.cols + abs(x0ffset);Mat resultImage(nRows, nCols, srcImage.type());//图像遍历for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){int x = j - x0ffset;int y = i - y0ffset;//边界判断if (x >= 0 && y >= 0 && x < nCols && y < nRows){resultImage.at<Vec3b>(i, j) = srcImage.ptr<Vec3b>(y)[x];}}}return resultImage;
}
Mat img_shift(Mat img, int d)
{Mat tmp;if (d > 0){//右移Mat q0(img, Rect(0, 0, img.cols - d, img.rows));Mat q1(img, Rect(img.cols - d, 0, d, img.rows));q0.copyTo(tmp);Mat q2(img, Rect(0, 0, d, img.rows));Mat q3(img, Rect(d, 0, img.cols - d, img.rows));q1.copyTo(q2);tmp.copyTo(q3);}else{//左移d = -d;Mat q0(img, Rect(0, 0, d, img.rows));Mat q1(img, Rect(d, 0, img.cols - d, img.rows));q0.copyTo(tmp);Mat q2(img, Rect(0, 0, img.cols - d, img.rows));Mat q3(img, Rect(img.cols - d, 0, d, img.rows));q1.copyTo(q2);tmp.copyTo(q3);}return img;}int main()
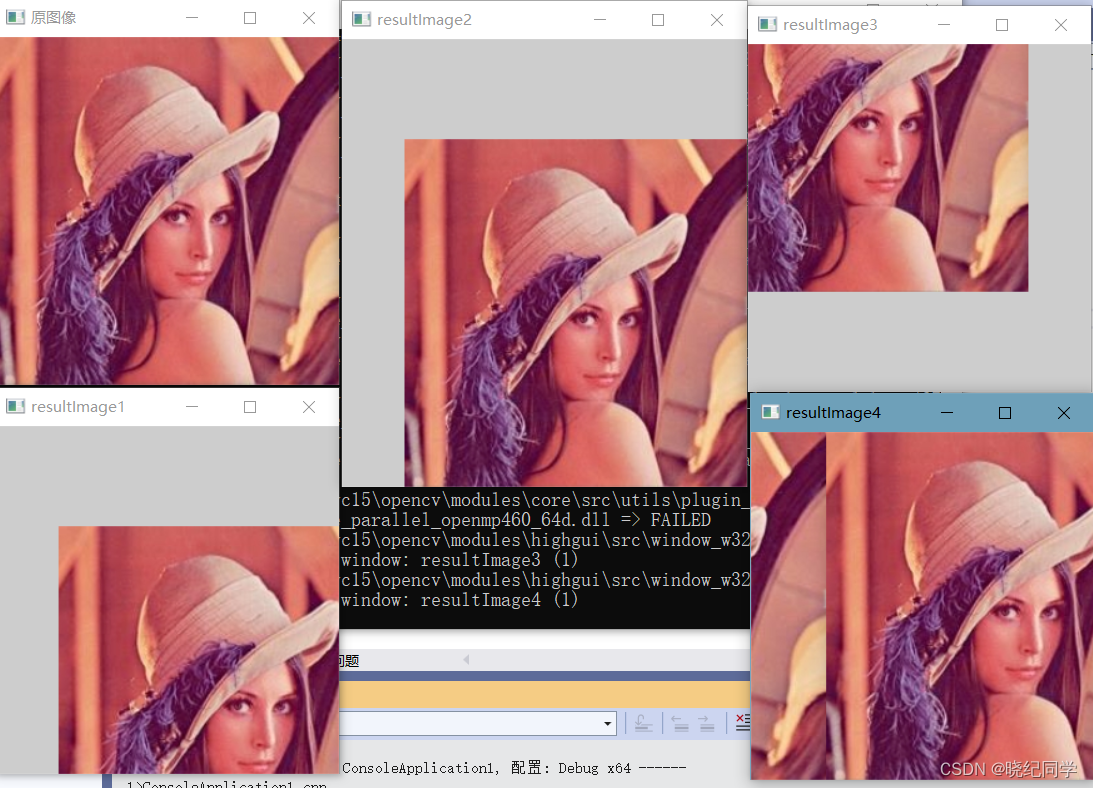
{//读取图像Mat srcImage = imread("E:\\Lena.jpg");if (srcImage.empty()){return -1;}//显示原图像imshow("原图像", srcImage);int x0ffset = 50;int y0ffset = 80;Mat resultImage1 = imageTranslation1(srcImage, x0ffset, y0ffset);imshow("resultImage1", resultImage1);Mat resultImage2 = imageTranslation2(srcImage, x0ffset, y0ffset);imshow("resultImage2", resultImage2);x0ffset = -50;y0ffset = -80;Mat resultImage3 = imageTranslation1(srcImage, x0ffset, y0ffset);cv::imshow("resultImage3", resultImage3);Mat resultImage4 = img_shift(srcImage, 60);imshow("resultImage4", resultImage4);cv::waitKey(0);return 0;
}
//第二种图像平移
//将图像扩展两倍的宽 并对其进行截取达到是图像平移
Mat img_shift1(Mat img, int d)
{Mat src(img.rows, img.cols * 2, img.type());//水平平移 则在水平方向上对其复制粘贴img.copyTo(src({ 0,0,img.cols,img.rows }));img.copyTo(src({ img.cols,0,img.cols,img.rows }));imshow("src", src);if (d > 0){Mat tmp(src, Rect(img.cols - d, 0, img.cols, img.rows));tmp.copyTo(img);}else{Mat tmp(src, Rect(-d, 0, img.cols, img.rows));tmp.copyTo(img);}return img;
}
uchar pixel_value = Mat.ptr<uchar>(row)[col]; //获取某个像素值(row行col列)Mat.ptr<uchar>(row); //获取某行的首地址
二、图像旋转
图像旋转是指图像按照某个位置转动一定的角度的过程,旋转中图像仍保持着原始尺寸。图像旋转后图像水平对称轴、垂直对称轴及中心坐标原点都可能会发生变换,因此需要对图像旋转中的坐标进行相应转换。
2.1 求旋转矩阵
假设有一个点:P(x,y),它在绕原点 O(0,0) 旋转 β 后,被转换成 P’(x’,y’),另外,点 P 到原点 O 的距离为 r:

假设 P(x,y) 点与 X 轴成一个角α。在这里,公式如下:
x = r cos(α)
y = r sin(α)
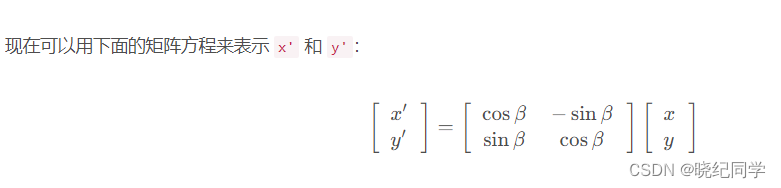
同理,P’(x’,y’) 点将与 X 轴形成一个角,α + β。因此,公式如下:x’ = r cos(α+β)
y’ = r sin(α+β)
接下来,将使用下面的三角恒等式:cos(α+β) = cosαcosβ – sinαsinβ
现在,已经得到了前面的方程,可以把任何点变换成一个新的点,只要它旋转一个给定的角度。同样的方程可以应用于图像中的每个像素,从而得到旋转后的图像。但是,即使图像被旋转了,它仍然在一个矩形内。这意味着新图像的尺寸可以改变,而在平移中,输出图像和输入图像的尺寸保持不变。

2.2 求旋转后图像的尺寸
这里将考虑两种情况。
第一种情况是保持输出图像的尺寸与输入图像的尺寸相同。
第二种情况是修改输出图像的尺寸。
通过下面的图表来理解它们之间的区别。将图像以逆时针方向围绕图像中心旋转一个角度 ϴ ——左半部分显示的是即使是在旋转之后,图像的尺寸保持不变的情况
而在右半部分,缩放尺寸以覆盖整个旋转后的图像。
可以看到两种情况下得到的结果的差异。
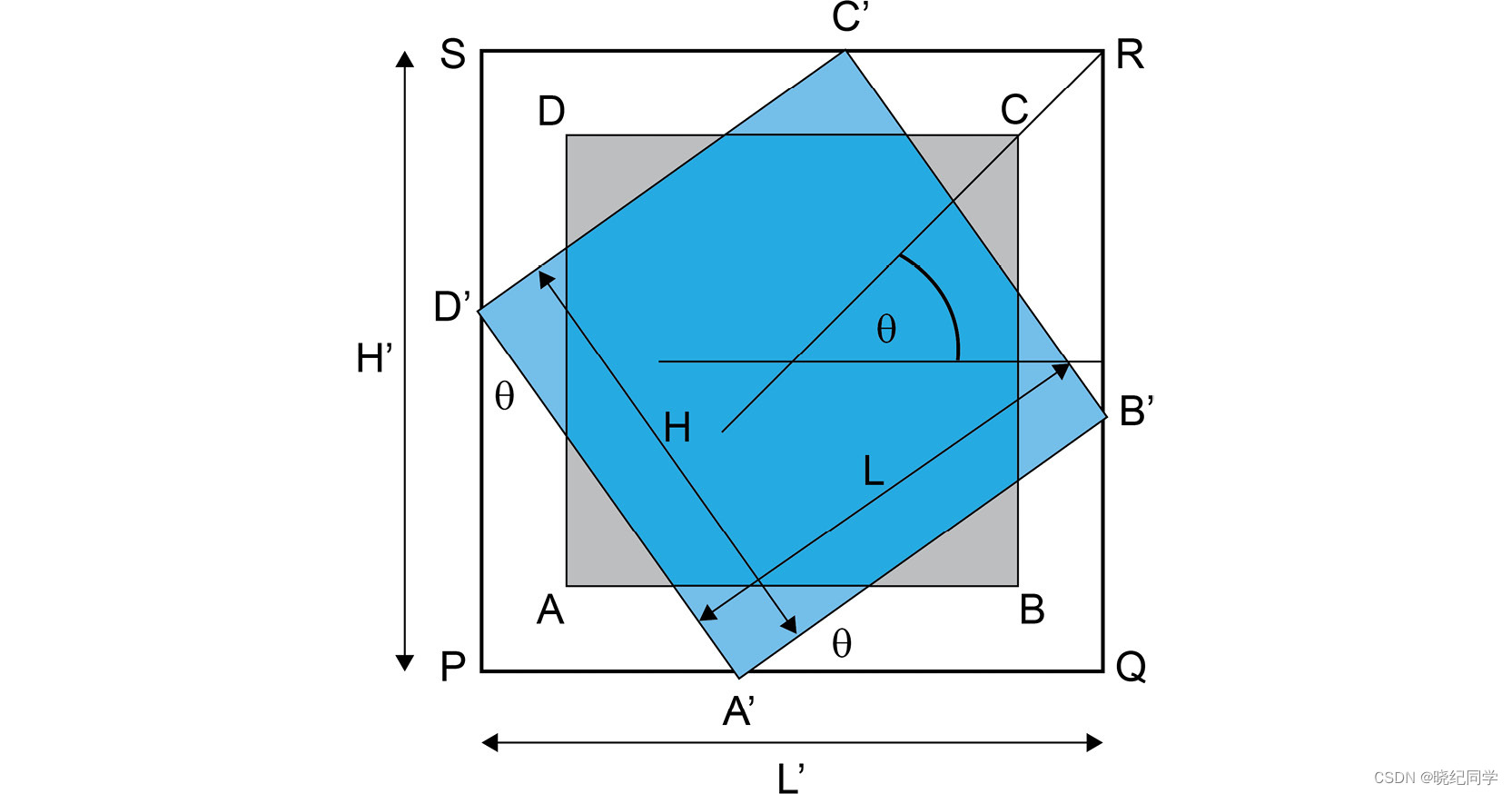
下图中 L 和 H 为原始图像的尺寸,L' 和 H' 为旋转后的尺寸。
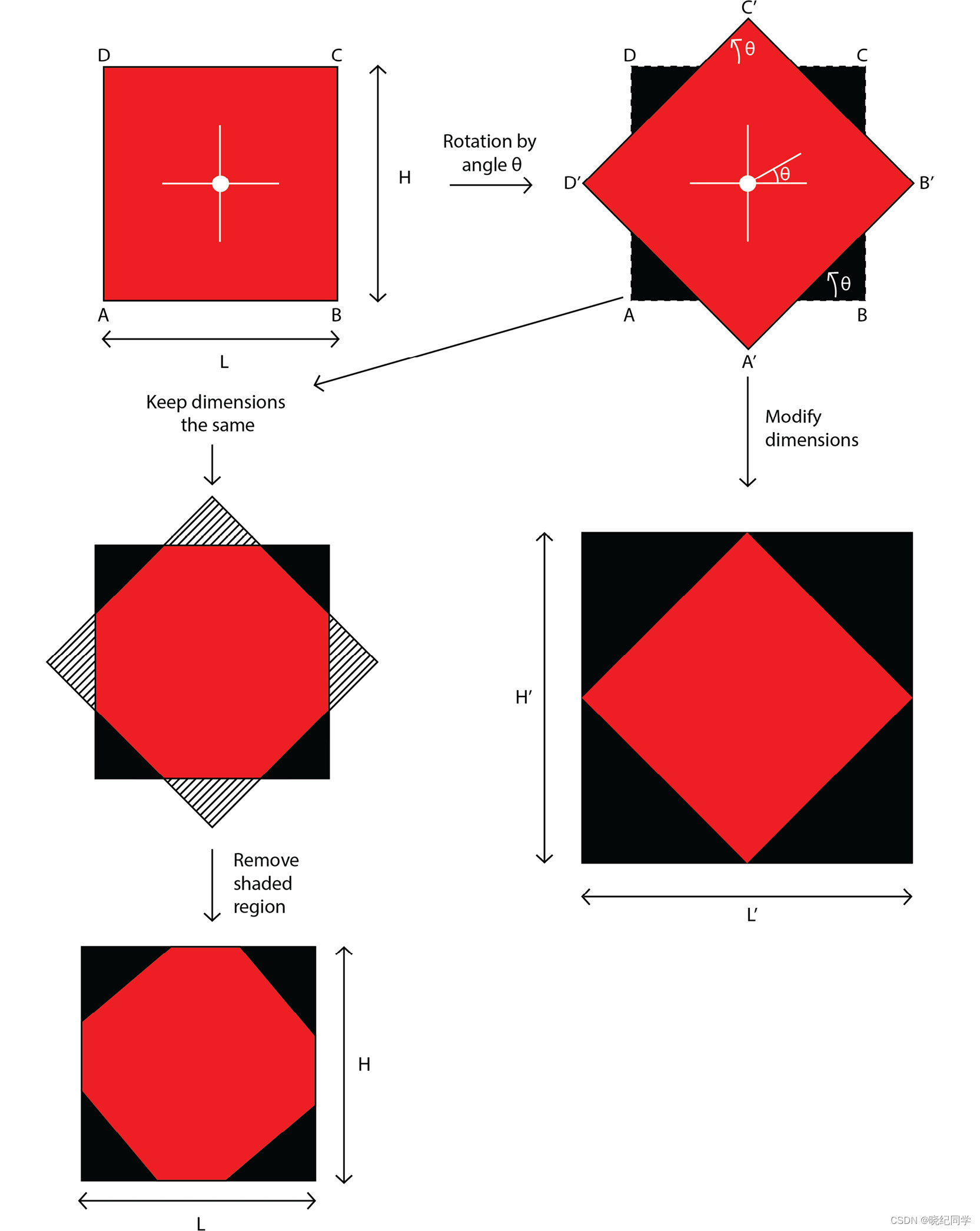
上图中,旋转后图像的大小,取决于图像的尺寸是保持不变还是在旋转时进行了修改。对于想要保持图像大小与初始图像大小相同的情况,只需要剔除额外的区域。如果不想保持相同的尺寸,需要学习如何获得旋转后的图像的尺寸。

2.3手工实现图像旋转
Mat imgRotate(Mat matSrc, float angle, bool direction)
{float theta = angle * CV_PI / 180.0;int nRowsSrc = matSrc.rows;int nColsSrc = matSrc.cols;// 如果是顺时针旋转if (!direction)theta = 2 * CV_PI - theta;// 全部以逆时针旋转来计算// 逆时针旋转矩阵float matRotate[3][3]{{std::cos(theta), -std::sin(theta), 0},{std::sin(theta), std::cos(theta), 0 },{0, 0, 1}};float pt[3][2]{{ 0, nRowsSrc },{nColsSrc, nRowsSrc},{nColsSrc, 0}};for (int i = 0; i < 3; i++){float x = pt[i][0] * matRotate[0][0] + pt[i][1] * matRotate[1][0];float y = pt[i][0] * matRotate[0][1] + pt[i][1] * matRotate[1][1];pt[i][0] = x;pt[i][1] = y;}// 计算出旋转后图像的极值点和尺寸float fMin_x = min(min(min(pt[0][0], pt[1][0]), pt[2][0]), (float)0.0);float fMin_y = min(min(min(pt[0][1], pt[1][1]), pt[2][1]), (float)0.0);float fMax_x = max(max(max(pt[0][0], pt[1][0]), pt[2][0]), (float)0.0);float fMax_y = max(max(max(pt[0][1], pt[1][1]), pt[2][1]), (float)0.0);int nRows = cvRound(fMax_y - fMin_y + 0.5) + 1;int nCols = cvRound(fMax_x - fMin_x + 0.5) + 1;int nMin_x = cvRound(fMin_x + 0.5);int nMin_y = cvRound(fMin_y + 0.5);// 拷贝输出图像Mat matRet(nRows, nCols, matSrc.type(), Scalar(0));for (int j = 0; j < nRows; j++){for (int i = 0; i < nCols; i++){// 计算出输出图像在原图像中的对应点的坐标,然后复制该坐标的灰度值// 因为是逆时针转换,所以这里映射到原图像的时候可以看成是,输出图像// 到顺时针旋转到原图像的,而顺时针旋转矩阵刚好是逆时针旋转矩阵的转置// 同时还要考虑到要把旋转后的图像的左上角移动到坐标原点。int x = (i + nMin_x) * matRotate[0][0] + (j + nMin_y) * matRotate[0][1];int y = (i + nMin_x) * matRotate[1][0] + (j + nMin_y) * matRotate[1][1];if (x >= 0 && x < nColsSrc && y >= 0 && y < nRowsSrc){matRet.at<Vec3b>(j, i) = matSrc.at<Vec3b>(y, x);}}}return matRet;
}
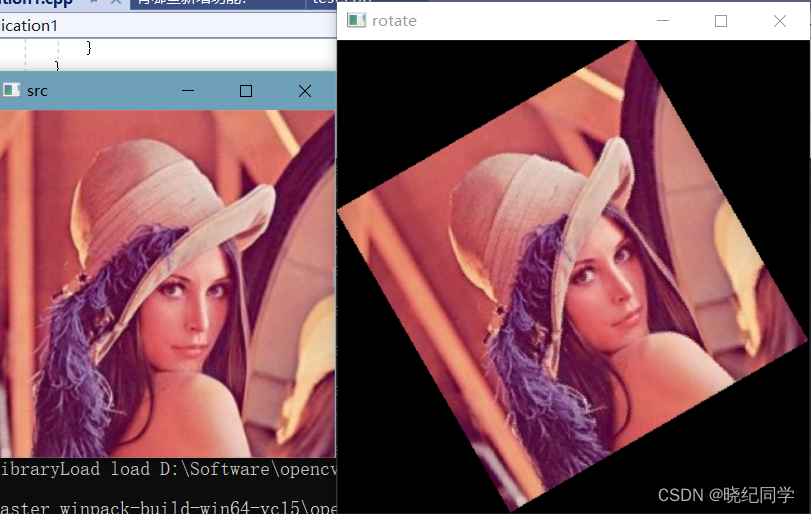
int main()
{Mat matSrc = imread("E:\\Lena.jpg");if (matSrc.empty())return 1;float angle = 30;Mat matRet = imgRotate(matSrc, angle, true);imshow("src", matSrc);imshow("rotate", matRet);// 保存图像imwrite("rotate_panda.jpg", matRet);waitKey();return 0;
}
2.4 opencv函数实现图像旋转
// 图像旋转
void Rotate(const Mat& srcImage, Mat& destImage, double angle)//angle表示要旋转的角度
{Point2f center(srcImage.cols / 2, srcImage.rows / 2);//中心Mat M = getRotationMatrix2D(center, angle, 1);//计算旋转的仿射变换矩阵 warpAffine(srcImage, destImage, M, Size(srcImage.cols, srcImage.rows));//仿射变换 circle(destImage, center, 2, Scalar(255, 0, 0));
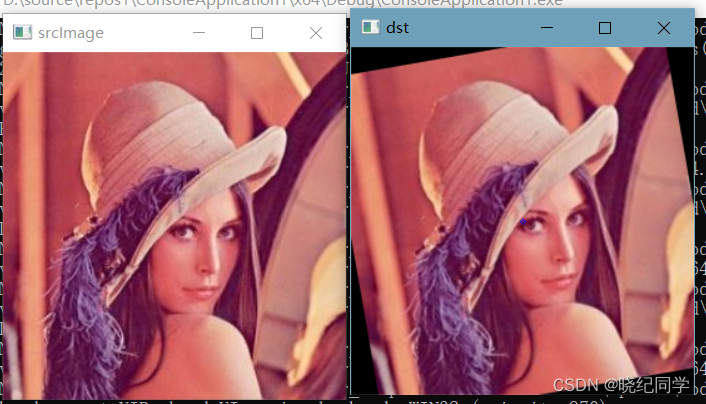
}int main()
{//读入图像,并判断图像是否读入正确cv::Mat srcImage = imread("E:\\Lena.jpg");if (!srcImage.data){puts("打开图像文件失败");return -1;}imshow("srcImage", srcImage);//将图片按比例缩放至宽为250像素的大小Mat destImage;double angle = 9.9;//角度Rotate(srcImage, destImage, angle);imshow("dst", destImage);waitKey(0);return 0;
}
旋转分为三步操作:
1. 首先,你需要得到旋转的中心。这通常是你要旋转的图像的中心。
2. 接下来,创建2d旋转矩阵。OpenCV提供了我们在上面讨论过的getRotationMatrix2D()函数。
3. 最后,使用在上一步中创建的旋转矩阵对图像应用仿射变换。OpenCV中的warpAffine()函数完成这项工作。getRotationMatrix2D(center, angle, scale)
getRotationMatrix2D()函数接受以下参数:center:图像的旋转中心:angle: 旋转角度:scale :一个各向同性的比例因子,根据提供的值将图像向上或向下缩放如果angle是正的,图像将逆时针方向旋转。如果你想顺时针旋转图像相同的量,那么角度需要是负的。warpAffine()函数的作用是:对图像应用一个仿射变换。在进行仿射变换后,原图像中所有的平行线在输出图像中也保持平行。
warpAffine(src, M, dsize[, dst[, flags[, borderMode[, borderValue]]]]
)
函数的参数:
src:原图
M:变换矩阵
dsize:输出图像的大小
dst:输出图像
flags: 插值方法的组合如INTER_LINEAR或INTER_NEAREST
borderMode:像素扩展方法
borderValue:在边界不变的情况下使用的值,默认值为0
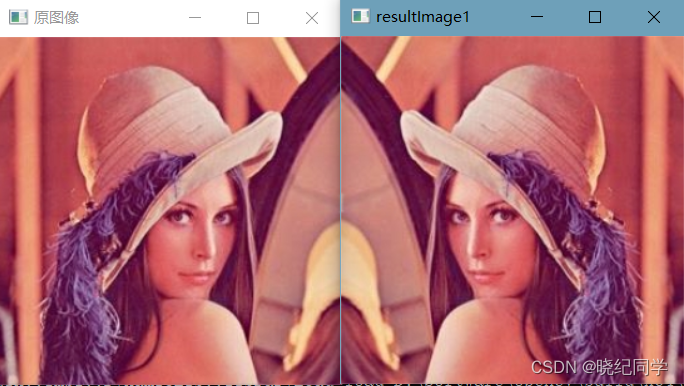
三、图像翻转
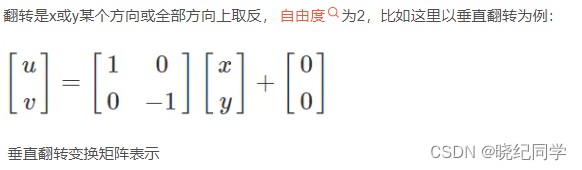
3.1左右翻转
//图像翻转,图像大小不变
Mat imageTranslation1(Mat& srcImage)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size(), srcImage.type());//遍历图像for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>(i, nCols-j-1);}}return resultImage;
}int main()
{//读取图像Mat srcImage = imread("E:\\Lena.jpg");if (srcImage.empty()){return -1;}//显示原图像imshow("原图像", srcImage);int x0ffset = 50;int y0ffset = 80;Mat resultImage1 = imageTranslation1(srcImage);imshow("resultImage1", resultImage1);cv::waitKey(0);return 0;
}
3.2、上下翻转
//图像翻转,图像大小不变
Mat imageTranslation1(Mat& srcImage)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size(), srcImage.type());//遍历图像for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>(nRows-1-i, j);}}return resultImage;
}
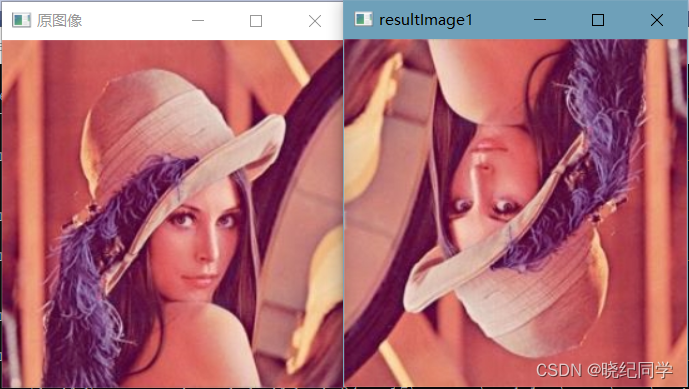
3.3 上下颠倒,左右相反
//图像翻转,图像大小不变
Mat imageTranslation1(Mat& srcImage)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size(), srcImage.type());//遍历图像for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>(nRows-1-i, nCols-1-j);}}return resultImage;
}
4、错切变换
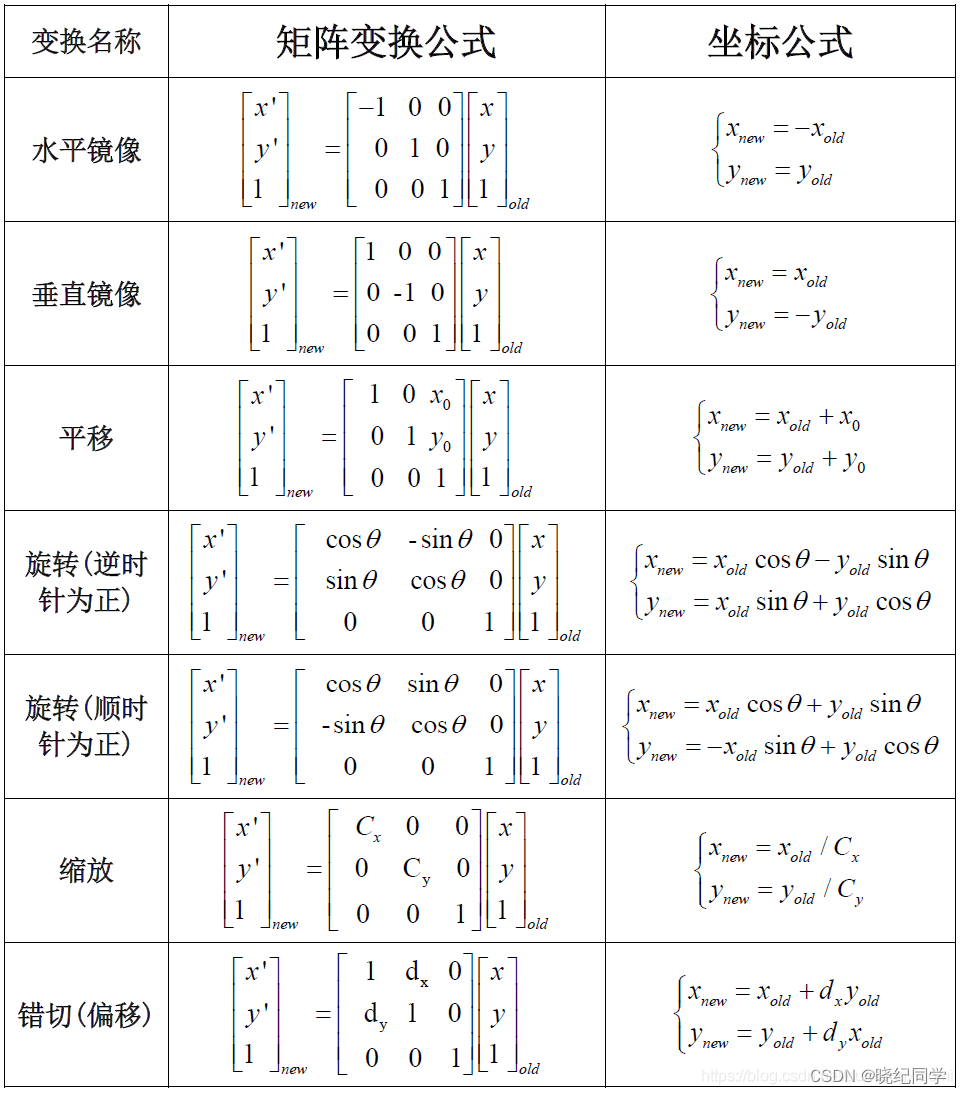
图像的错切变换也称斜切,是指平面景物在投影平面上的非垂直投影,使图像中的图形在水平方向或垂直方向产生扭变。
以水平扭变为例,像素点 (x,y) 在水平方向发生扭变变成斜边,而在垂直方向的边不变,可以由以下公式描述:
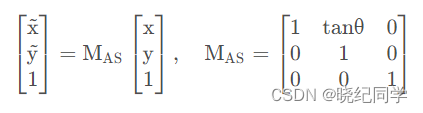
4.1 实现错切变换
//图像错切
Mat imageTranslation(Mat& srcImage, float a,float b)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size(), srcImage.type());//遍历图像for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){if (i + a * j > 0 && i + a * j < nRows && i * b + j >0 && i * b + j< nCols){resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>( i + a * j, i * b + j);}}}return resultImage;
}
5、仿射变换
仿射变换可以理解为矩阵乘法(线性变换)和向量加法(平移)的变换。本质上,一个仿射变换代表了两个图像之间的关系,可以分别表示为:
1.旋转(线性变换)
2.平移(向量加法)
3.缩放操作(线性变换)
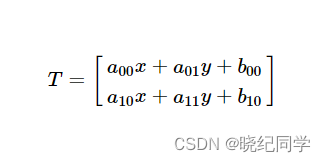
仿射变换通常使用2×3矩阵表示
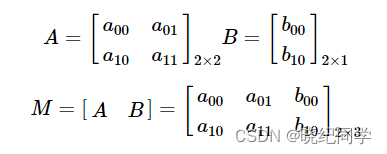
将M乘于一个二维向量[x, y],例如图像像素坐标,最终可表示为:
5.1 求解仿射变换
仿射变换基本上是两个图像之间的关系。这种关系的信息可以通过两种方式获得:
1.已知X和T,那我们的任务就是求M;
2.已知M和X,应用T=M⋅X,得到T。
如下图:点1、2和3(在图1中形成一个三角形)被映射到图2中,仍然形成一个三角形,但现在它们已经发生了变化。如果我们找到了这3个点的仿射变换,那么我们就可以将找到的关系应用到图像中的所有像素上。

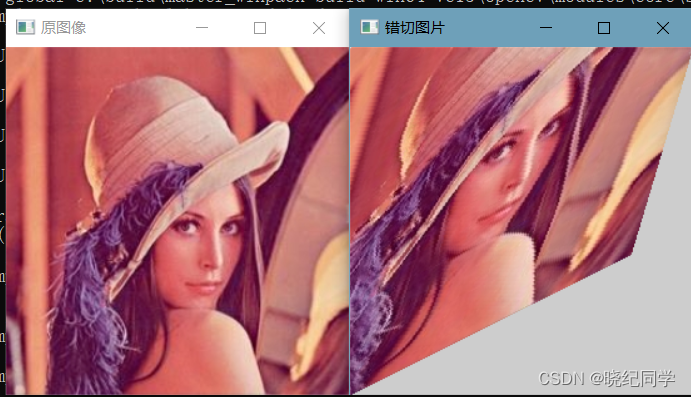
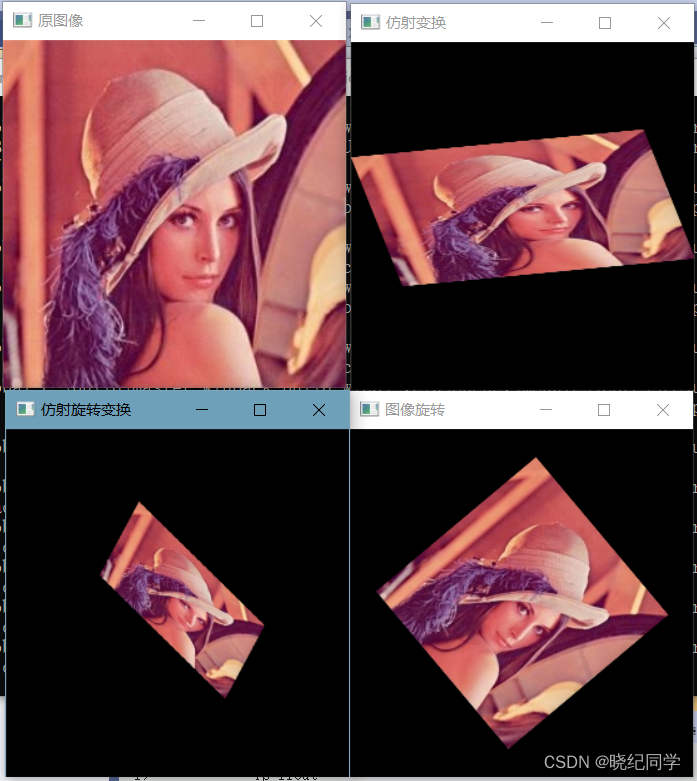
5.2 OpenCV实现仿射变换
//全局变量
String src_windowName = "原图像";
String warp_windowName = "仿射变换";
String warp_rotate_windowName = "仿射旋转变换";
String rotate_windowName = "图像旋转";int main()
{Point2f srcTri[3];Point2f dstTri[3];Mat rot_mat(2, 3, CV_32FC1);Mat warp_mat(2, 3, CV_32FC1);Mat srcImage, warp_dstImage, warp_rotate_dstImage, rotate_dstImage;//加载图像srcImage = imread("E:\\Lena.jpg");//判断文件是否加载成功if (srcImage.empty()){cout << "图像加载失败!" << endl;return -1;}elsecout << "图像加载成功!" << endl << endl;//创建仿射变换目标图像与原图像尺寸类型相同warp_dstImage = Mat::zeros(srcImage.rows, srcImage.cols, srcImage.type());//设置三个点来计算仿射变换srcTri[0] = Point2f(0, 0);srcTri[1] = Point2f(srcImage.cols - 1, 0);srcTri[2] = Point2f(0, srcImage.rows - 1);dstTri[0] = Point2f(srcImage.cols * 0.0, srcImage.rows * 0.33);dstTri[1] = Point2f(srcImage.cols * 0.85, srcImage.rows * 0.25);dstTri[2] = Point2f(srcImage.cols * 0.15, srcImage.rows * 0.7);//计算仿射变换矩阵warp_mat = getAffineTransform(srcTri, dstTri);//对加载图形进行仿射变换操作warpAffine(srcImage, warp_dstImage, warp_mat, warp_dstImage.size());//计算图像中点顺时针旋转50度,缩放因子为0.6的旋转矩阵Point center = Point(warp_dstImage.cols / 2, warp_dstImage.rows / 2);double angle = -50.0;double scale = 0.6;//计算旋转矩阵rot_mat = getRotationMatrix2D(center, angle, scale);//旋转已扭曲图像warpAffine(warp_dstImage, warp_rotate_dstImage, rot_mat, warp_dstImage.size());//将原图像旋转warpAffine(srcImage, rotate_dstImage, rot_mat, srcImage.size());//显示变换结果namedWindow(src_windowName, WINDOW_AUTOSIZE);imshow(src_windowName, srcImage);namedWindow(warp_windowName, WINDOW_AUTOSIZE);imshow(warp_windowName, warp_dstImage);namedWindow(warp_rotate_windowName, WINDOW_AUTOSIZE);imshow(warp_rotate_windowName, warp_rotate_dstImage);namedWindow(rotate_windowName, WINDOW_AUTOSIZE);imshow(rotate_windowName, rotate_dstImage);waitKey(0);return 0;
}
5.3手动
#include <opencv2/opencv.hpp>
#include <iostream>using namespace std;
using namespace cv;#define PI 3.1415927
#define MAX(a,b) (((a)>(b))?(a):(b))// 单点双线性插值
// [输入] ii--dst的行索引
// jj--dst的列索引
// u_src--jj反向映射到src中对应的列索引
// v_src--ii反向映射到src中对应的行索引
int Bilinear_interpolation_img(Mat src, Mat& dst, int ii, int jj, double u_src, double v_src)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U){printf("输入图像有误!\n");return 0;}if (u_src >= 0 && u_src <= src.cols - 1 && v_src >= 0 && v_src <= src.rows - 1){int x1 = int(u_src), x2 = (int)(u_src + 0.5), y1 = (int)v_src, y2 = (int)(v_src + 0.5);double pu = fabs(u_src - x1), pv = fabs(v_src - y2);if (src.channels() == 1){dst.at<uchar>(ii, jj) = (1 - pv) * (1 - pu) * src.at<uchar>(y2, x1) +(1 - pv) * pu * src.at<uchar>(y2, x2) +pv * (1 - pu) * src.at<uchar>(y1, x1) + pv * pu * src.at<uchar>(y1, x2);}else{dst.at<Vec3b>(ii, jj)[0] = (1 - pv) * (1 - pu) * src.at<Vec3b>(y2, x1)[0] +(1 - pv) * pu * src.at<Vec3b>(y2, x2)[0] +pv * (1 - pu) * src.at<Vec3b>(y1, x1)[0] +pv * pu * src.at<Vec3b>(y1, x2)[0];dst.at<Vec3b>(ii, jj)[1] = (1 - pv) * (1 - pu) * src.at<Vec3b>(y2, x1)[1] +(1 - pv) * pu * src.at<Vec3b>(y2, x2)[1] +pv * (1 - pu) * src.at<Vec3b>(y1, x1)[1] +pv * pu * src.at<Vec3b>(y1, x2)[1];dst.at<Vec3b>(ii, jj)[2] = (1 - pv) * (1 - pu) * src.at<Vec3b>(y2, x1)[2] +(1 - pv) * pu * src.at<Vec3b>(y2, x2)[2] +pv * (1 - pu) * src.at<Vec3b>(y1, x1)[2] +pv * pu * src.at<Vec3b>(y1, x2)[2];}}return 1;
}//水平镜像、垂直镜像变换
// [输入] way_mirror镜像方法:0水平镜像 1垂直镜像
int affine_mirrorImg(Mat src, Mat& dst, int way_mirror)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U) {printf("输入图像有误!\n");return 0;}if (way_mirror != 0 && way_mirror != 1) {printf("输入镜像方法不为1或0,way_mirror: %d!\n", way_mirror);return 0;}int dst_h = src.rows, dst_w = src.cols;//目标图像宽高 初始化为原图宽高int ii = 0, jj = 0;double u_src = 0, v_src = 0;Mat M_mirr = (Mat_<double>(3, 3) << -1, 0, 0, 0, 1, 0, 0, 0, 1);if (way_mirror) {M_mirr.at<double>(0, 0) = 1;M_mirr.at<double>(1, 1) = -1;}Mat M_corrToSrc = (Mat_<double>(3, 3) << 1, 0, src.cols, 0, 1, 0, 0, 0, 1);if (way_mirror) {M_corrToSrc.at<double>(0, 2) = 0;M_corrToSrc.at<double>(1, 2) = src.rows;}Mat M_trans = M_corrToSrc * M_mirr;Mat M_trans_inv = M_trans.inv();Mat dst_uv(3, 1, CV_64F);dst_uv.at<double>(2, 0) = 1;Mat src_uv(dst_uv);if (src.channels() == 3)dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC3); //RGB图初始elsedst = cv::Mat::zeros(dst_h, dst_w, CV_8UC1);//反向映射for (ii = 0; ii < dst_h; ++ii){for (jj = 0; jj < dst_w; ++jj){dst_uv.at<double>(0, 0) = jj;dst_uv.at<double>(1, 0) = ii;src_uv = M_trans_inv * dst_uv;u_src = src_uv.at<double>(0, 0);v_src = src_uv.at<double>(1, 0);// 边界问题if (u_src < 0) u_src = 0;if (v_src < 0) v_src = 0;if (u_src > src.cols - 1) u_src = src.cols - 1;if (v_src > src.rows - 1) v_src = src.rows - 1;//双线性插值Bilinear_interpolation_img(src, dst, ii, jj, u_src, v_src);}}return 1;
}// 图像旋转(绕图像中心) 逆时针旋转为正
// 可处理8位单通道或三通道图像
int affine_rotateImg(Mat src, Mat& dst, double Angle)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U){printf("输入图像有误!\n");return 0;}double angle = 0, cos_a = 0, sin_a = 0;//旋转角度int dst_h = src.rows, dst_w = src.cols;//目标图像宽高 初始化为原图宽高int ii = 0, jj = 0;double u_src = 0, v_src = 0;angle = Angle / 180 * CV_PI;cos_a = cos(angle);sin_a = sin(angle);dst_h = (int)(fabs(src.rows * cos_a) + fabs(src.cols * sin_a) + 0.5);dst_w = (int)(fabs(src.rows * sin_a) + fabs(src.cols * cos_a) + 0.5);if (src.channels() == 3){dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC3); //RGB图初始}else{dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC1);}Mat M_toPhysics = (Mat_<double>(3, 3) << 1, 0, -0.5 * src.cols, 0, -1, 0.5 * src.rows, 0, 0, 1);Mat M_rotate = (Mat_<double>(3, 3) << cos_a, -sin_a, 0, sin_a, cos_a, 0, 0, 0, 1);Mat M_toPixel = (Mat_<double>(3, 3) << 1, 0, 0.5 * dst.cols, 0, -1, 0.5 * dst.rows, 0, 0, 1);Mat M_trans = M_toPixel * M_rotate * M_toPhysics;Mat M_trans_inv = M_trans.inv();Mat dst_uv(3, 1, CV_64F);dst_uv.at<double>(2, 0) = 1;Mat src_uv(dst_uv);//反向映射for (ii = 0; ii < dst_h; ++ii){for (jj = 0; jj < dst_w; ++jj){dst_uv.at<double>(0, 0) = jj;dst_uv.at<double>(1, 0) = ii;src_uv = M_trans_inv * dst_uv;u_src = src_uv.at<double>(0, 0);v_src = src_uv.at<double>(1, 0);//处理边界问题if (int(Angle) % 90 == 0){if (u_src < 0) u_src = 0;if (v_src < 0) v_src = 0;if (u_src > src.cols - 1) u_src = src.cols - 1;if (v_src > src.rows - 1) v_src = src.rows - 1;}//双线性插值Bilinear_interpolation_img(src, dst, ii, jj, u_src, v_src);}}return 1;
}// 图像平移 在像素坐标系下进行 图像左顶点为原点,x轴为图像列,y轴为图像行
// tx: x方向(图像列)平移量,向右平移为正
// ty: y方向(图像行)平移量,向下平移为正
int affine_moveImg(Mat src, Mat& dst, double tx, double ty)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U){printf("输入图像有误!\n");return 0;}int dst_h = src.rows, dst_w = src.cols;int ii = 0, jj = 0;double u_src = 0, v_src = 0;if (src.channels() == 3){dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC3); //RGB图初始}else{dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC1);}Mat M_toPhysics = (Mat_<double>(3, 3) << 1, 0, tx, 0, 1, ty, 0, 0, 1);Mat M_trans_inv = M_toPhysics.inv();Mat dst_uv(3, 1, CV_64F);dst_uv.at<double>(2, 0) = 1;Mat src_uv(dst_uv);//反向映射for (ii = 0; ii < dst_h; ++ii){for (jj = 0; jj < dst_w; ++jj){dst_uv.at<double>(0, 0) = jj;dst_uv.at<double>(1, 0) = ii;src_uv = M_trans_inv * dst_uv;u_src = src_uv.at<double>(0, 0);v_src = src_uv.at<double>(1, 0);//双线性插值Bilinear_interpolation_img(src, dst, ii, jj, u_src, v_src);}}return 1;
}// 缩放 以图像左顶点为原点
// cx: 水平缩放尺度
// cy: 垂直缩放尺度
int affine_scalingImg(Mat src, Mat& dst, double cx, double cy)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U){printf("输入图像有误!\n");return 0;}int dst_h = (int)(cy * src.rows + 0.5), dst_w = (int)(cx * src.cols + 0.5);int ii = 0, jj = 0;double u_src = 0, v_src = 0;if (src.channels() == 3){dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC3); //RGB图初始}else{dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC1);}Mat M_scale = (Mat_<double>(3, 3) << cx, 0, 0, 0, cy, 0, 0, 0, 1);Mat M_trans_inv = M_scale.inv();Mat dst_uv(3, 1, CV_64F);dst_uv.at<double>(2, 0) = 1;Mat src_uv(dst_uv);//反向映射for (ii = 0; ii < dst_h; ++ii){for (jj = 0; jj < dst_w; ++jj){dst_uv.at<double>(0, 0) = jj;dst_uv.at<double>(1, 0) = ii;src_uv = M_trans_inv * dst_uv;u_src = src_uv.at<double>(0, 0);v_src = src_uv.at<double>(1, 0);// 边界问题if (u_src < 0) u_src = 0;if (v_src < 0) v_src = 0;if (u_src > src.cols - 1) u_src = src.cols - 1;if (v_src > src.rows - 1) v_src = src.rows - 1;//双线性插值Bilinear_interpolation_img(src, dst, ii, jj, u_src, v_src);}}return 1;
}// 错切变换 以图像中心为偏移中心
// [输入] sx--水平错切系数
// sy--垂直错切系数
int affine_miscut(Mat src, Mat& dst, double sx, double sy)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U){printf("输入图像有误!\n");return 0;}int dst_h = fabs(sy) * src.cols + src.rows, dst_w = fabs(sx) * src.rows + src.cols;int ii = 0, jj = 0;double u_src = 0, v_src = 0;if (src.channels() == 3){dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC3); //RGB图初始}else{dst = cv::Mat::zeros(dst_h, dst_w, CV_8UC1);}Mat M_toPhysics = (Mat_<double>(3, 3) << 1, 0, -0.5 * src.cols, 0, -1, 0.5 * src.rows, 0, 0, 1);Mat M_rotate = (Mat_<double>(3, 3) << 1, sx, 0, sy, 1, 0, 0, 0, 1);Mat M_toPixel = (Mat_<double>(3, 3) << 1, 0, 0.5 * dst.cols, 0, -1, 0.5 * dst.rows, 0, 0, 1);Mat M_trans = M_toPixel * M_rotate * M_toPhysics;Mat M_trans_inv = M_trans.inv();Mat dst_uv(3, 1, CV_64F);dst_uv.at<double>(2, 0) = 1;Mat src_uv(dst_uv);//反向映射for (ii = 0; ii < dst_h; ++ii){for (jj = 0; jj < dst_w; ++jj){dst_uv.at<double>(0, 0) = jj;dst_uv.at<double>(1, 0) = ii;src_uv = M_trans_inv * dst_uv;u_src = src_uv.at<double>(0, 0);v_src = src_uv.at<double>(1, 0);//双线性插值Bilinear_interpolation_img(src, dst, ii, jj, u_src, v_src);}}return 1;
}// 组合变换示例
// 缩放->旋转->错切(即偏移)
// [输入]
int affine_srm_combImg(Mat src, Mat& dst, double cx, double cy, double Angle, double sx, double sy)
{if (src.rows <= 0 || src.cols <= 0 ||(src.channels() != 1 && src.channels() != 3) || src.depth() != CV_8U){printf("输入图像有误!\n");return 0;}double angle, cos_a, sin_a;int dst_s_h, dst_s_w, dst_sr_h, dst_sr_w, dst_srm_h, dst_srm_w;angle = Angle / 180 * CV_PI;cos_a = cos(angle);sin_a = sin(angle);dst_s_h = (int)(cy * src.rows + 0.5);dst_s_w = (int)(cx * src.cols + 0.5);dst_sr_h = (int)(fabs(dst_s_h * cos_a) + fabs(dst_s_w * sin_a) + 0.5);dst_sr_w = (int)(fabs(dst_s_h * sin_a) + fabs(dst_s_w * cos_a) + 0.5);dst_srm_h = fabs(sy) * dst_sr_w + dst_sr_h;dst_srm_w = fabs(sx) * dst_sr_h + dst_sr_w;int ii = 0, jj = 0;double u_src = 0, v_src = 0;if (src.channels() == 3){dst = cv::Mat::zeros(dst_srm_h, dst_srm_w, CV_8UC3); //RGB图初始}else{dst = cv::Mat::zeros(dst_srm_h, dst_srm_w, CV_8UC1);}Mat M_scale = (Mat_<double>(3, 3) << cx, 0, 0, 0, cy, 0, 0, 0, 1);Mat M_toPhysics = (Mat_<double>(3, 3) << 1, 0, -0.5 * dst_s_w, 0, -1, 0.5 * dst_s_h, 0, 0, 1);Mat M_rotate = (Mat_<double>(3, 3) << cos_a, -sin_a, 0, sin_a, cos_a, 0, 0, 0, 1);Mat M2 = M_rotate * M_toPhysics;Mat M_mis = (Mat_<double>(3, 3) << 1, sx, 0, sy, 1, 0, 0, 0, 1);Mat M_toPixel = (Mat_<double>(3, 3) << 1, 0, 0.5 * dst.cols, 0, -1, 0.5 * dst.rows, 0, 0, 1);Mat M3 = M_toPixel * M_mis;Mat M_trans = M3 * M2 * M_scale;Mat M_trans_inv = M_trans.inv();Mat dst_uv(3, 1, CV_64F);dst_uv.at<double>(2, 0) = 1;Mat src_uv(dst_uv);//反向映射for (ii = 0; ii < dst_srm_h; ++ii){for (jj = 0; jj < dst_srm_w; ++jj){dst_uv.at<double>(0, 0) = jj;dst_uv.at<double>(1, 0) = ii;src_uv = M_trans_inv * dst_uv;u_src = src_uv.at<double>(0, 0);v_src = src_uv.at<double>(1, 0);//处理边界问题if (int(Angle) % 90 == 0){if (u_src < 0) u_src = 0;if (v_src < 0) v_src = 0;if (u_src > src.cols - 1) u_src = src.cols - 1;if (v_src > src.rows - 1) v_src = src.rows - 1;}//双线性插值Bilinear_interpolation_img(src, dst, ii, jj, u_src, v_src);}}return 1;
}int main()
{Mat src = imread("E:\\Lena.jpg", 1), dst;//水平、垂直镜像int way_mirror = 1;//affine_mirrorImg(src, dst, way_mirror);//旋转double angle_r = 250;//int flag = affine_rotateImg(src, dst, angle_r);//if (flag == 0)//{// return;//}//平移double tx = 50, ty = -50;// affine_moveImg(src, dst, tx, ty);//尺度变换(缩放)double cx = 1.5, cy = 1.5;affine_scalingImg(src, dst, cx, cy);//错切(偏移)double sx = 0.2, sy = 0.2;//affine_trans_deviation(src, dst, sx, sy);affine_miscut(src, dst, sx, sy);//组合变换 缩放->旋转->错切(即偏移)//affine_srm_combImg(src, dst, cx, cy, angle_r, sx, sy);// 显示 Mat src_resize, dst_resize;//affine_scalingImg(src, src_resize, 0.4, 0.3);//affine_scalingImg(dst, dst_resize, 0.4, 0.3);namedWindow("src", 0);namedWindow("dst", 0);imshow("src", src);imshow("dst", dst);waitKey(0);system("pause");return 0;
}
6、图像缩放
图像可以通过两种方式调整大小:
假设图像的初始尺寸为 W×H,其中 W 和 H 分别代表宽度和高度。如果想要加倍的大小(尺寸)的图像,可以调整或缩放图像到 2W×2H。类似地,如果想将图像的大小(尺寸)减少一半,那么可以调整或缩放图像到W/2×H/2。因为只是想缩放图像,可以在调整大小时传递缩放因子(长度和宽度),图像输出尺寸可以根据这些比例因子计算出来。
同时,也可能想要将图像的大小调整为一个固定的尺寸,比如 420×360像素。在这种情况下,缩放将不起作用,因为不能确定初始维度是固定维度的倍数(或因数)。这要求在调整大小时直接传递图像的新尺寸。
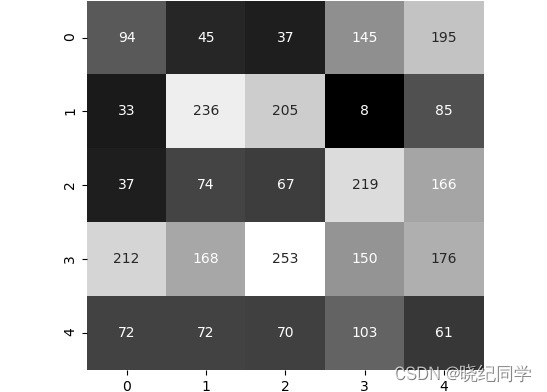
上图显示了想要调整大小的图像和像素值。目前,它的尺寸是 5×5。假设我们想要翻倍。这将导致以下输出。但是,我们想要填充像素值。
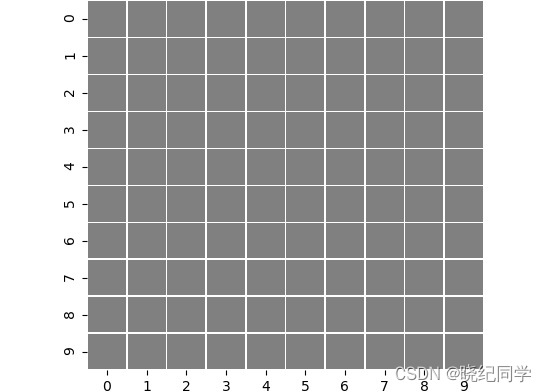
让我们看看我们有哪些不同的选择。可以复制像素。这将给我们如下图所示的结果:
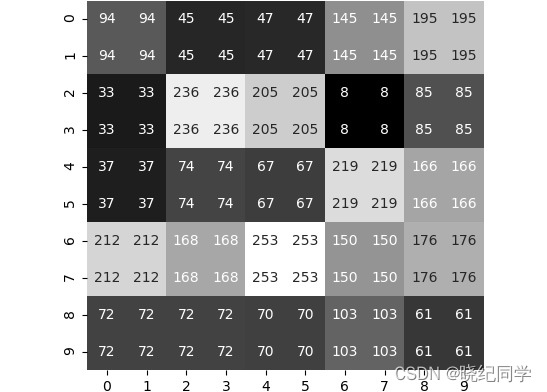
如果去掉前面图像中的像素值(方格里面的数字),将得到如下图所示的图像。将其与原始图像进行比较。注意它看起来和原始图像是多么的相似
类似地,如果想要将图像缩小一半,可以减少一些像素。你会注意到,在调整大小时,复制了像素。还可以使用其他一些技巧。譬如:可以使用插值,即根据相邻像素的像素值找出新的像素值,而不是直接复制它们。这给了颜色一个很好的平滑过渡。下图显示了如果我们使用不同的插值,结果是如何变化的。从下图中,可以看到,当从左到右执行时,新创建的像素值的计算方式是不同的。在前三幅图像中,像素是直接从相邻像素复制的,而在后一幅图像中,像素值依赖于所有相邻像素(左、右、上、下),也依赖于对角线相邻的像素:
6.1 实现图像缩放
//图像缩小
Mat imageTranslation(Mat& srcImage,int n)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size() / n, srcImage.type());//遍历图像for (int i = 0; i < nRows; i++){for (int j = 0; j < nCols; j++){if (n * i < nRows && n * j < nCols){resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>(n * i, n * j);}}}return resultImage;
}
//图像放大
Mat imageTranslation1(Mat& srcImage, int n)
{int nRows = srcImage.rows;int nCols = srcImage.cols;Mat resultImage(srcImage.size() * n, srcImage.type());//遍历图像for (int i = 0; i < nRows * n; i++){for (int j = 0; j < nCols * n ; j++){resultImage.at<Vec3b>(i, j) = srcImage.at<Vec3b>( i / n , j / n);}}return resultImage;
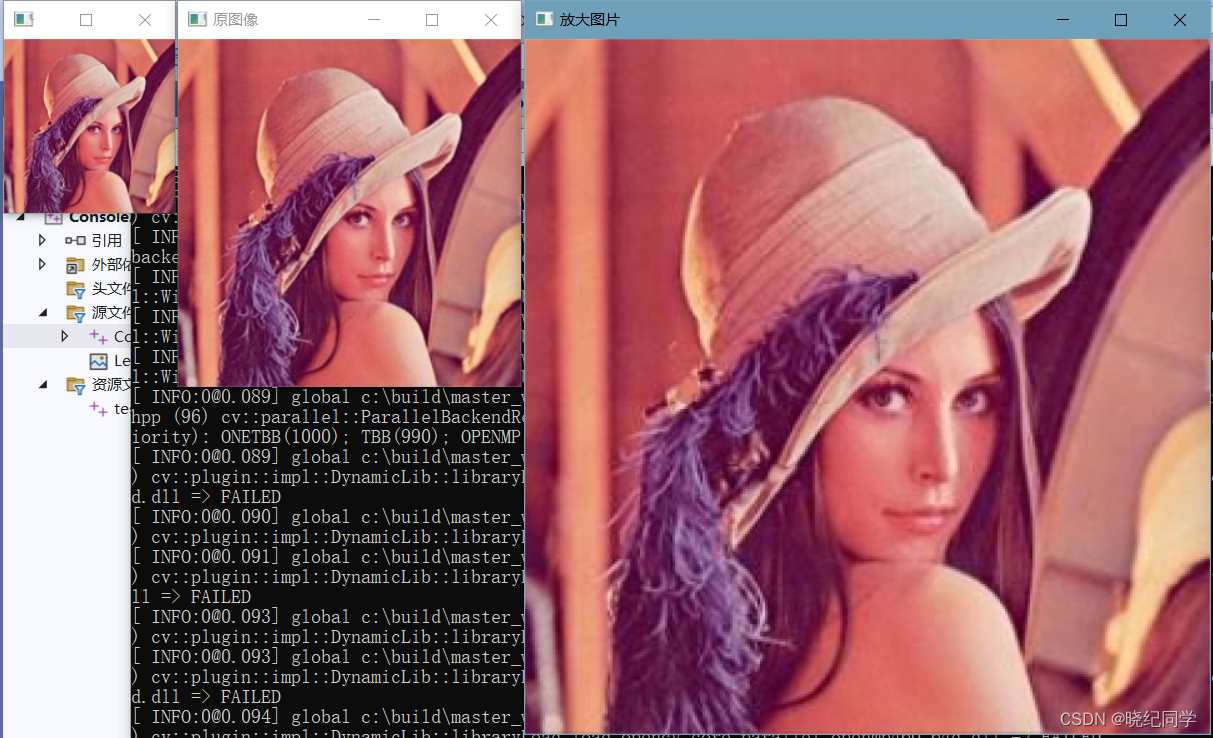
}int main()
{//读取图像Mat srcImage = imread("E:\\Lena.jpg");if (srcImage.empty()){return -1;}//显示原图像imshow("原图像", srcImage);int x0ffset = 50;int y0ffset = 80;int n = 2;Mat resultImage1 = imageTranslation(srcImage,n);imshow("缩小图片", resultImage1);Mat resultImage2 = imageTranslation1(srcImage, n);imshow("放大图片", resultImage2);cv::waitKey(0);return 0;
}
Mat imgDown_1(Mat& srcimg, float kx, float ky)
{//提取图像的分辨率int nrows = cvRound(srcimg.rows * kx);int ncols = cvRound(srcimg.cols * ky);Mat resimg(nrows, ncols, srcimg.type());for (int i = 0; i < nrows; i++){for (int j = 0; j < ncols; j++){//根据水平因子计算坐标int x = static_cast<int>((i + 1) / kx + 0.5) - 1;//根据垂直因子计算坐标int y = static_cast<int>((j + 1) / ky + 0.5) - 1;resimg.at<Vec3b>(i, j) = srcimg.at<Vec3b>(x, y);}}return resimg;
}
//对图像进行放大
Mat imgUp_1(Mat& srcimg, float kx, float ky)
{int nrows = srcimg.rows * kx;int ncols = srcimg.cols * ky;Mat resimg(nrows, ncols, srcimg.type());for (int i = 0; i < nrows; i++){//int x = i / kx;int x = static_cast<int>((i + 1) / kx + 0.7) - 1;for (int j = 0; j < ncols; j++){//int y = j / ky;int y = static_cast<int>((j + 1) / ky + 0.7) - 1;resimg.at<Vec3b>(i, j) = srcimg.at<Vec3b>(x, y);}}return resimg;
}Vec3b areaAverage(const Mat& srcimg, Point_<int> leftPoint, Point_<int> rightPoint)
{int tmp1 = 0, tmp2 = 0, tmp3 = 0;//计算区域字块像素点个数int nPix = (rightPoint.x - leftPoint.x + 1) * (rightPoint.y - leftPoint.y + 1);//对区域字块各个通道对像素值求和for (int i = leftPoint.x; i <= rightPoint.x; i++){for (int j = leftPoint.y; j <= rightPoint.y; j++){tmp1 += srcimg.at<Vec3b>(i, j)[0];tmp2 += srcimg.at<Vec3b>(i, j)[1];tmp3 += srcimg.at<Vec3b>(i, j)[2];}}//对每个通道求均值Vec3b vecTmp;vecTmp[0] = tmp1 / nPix;vecTmp[1] = tmp2 / nPix;vecTmp[2] = tmp3 / nPix;return vecTmp;
}Mat imgDown_2(const Mat& srcimg, double kx, double ky)
{int nrows = srcimg.rows * kx;int ncols = srcimg.cols * ky;/*int nrows = cvRound(srcimg.rows * kx);int ncols = cvRound(srcimg.cols * ky);*/Mat resimg(nrows, ncols, srcimg.type());//区域子块的左上角行列坐标int leftRowCoordinate = 0;int leftColCoordinate = 0;for (int i = 0; i < nrows; i++){//根据水平因子计算坐标int x = static_cast<int>((i + 1) / kx + 0.5) - 1;for (int j = 0; j < ncols; j++){//根据垂直因子计算坐标int y = static_cast<int>((j + 1) / ky + 0.5) - 1;//求解区域子块的均值resimg.at<Vec3b>(i, j) = areaAverage(srcimg, Point_<int>(leftRowCoordinate, leftColCoordinate), Point_<int>(x, y));//resimg.at<Vec3b>(i, j) = srcimg.at<Vec3b>(x, y);//更新下子块左上角的列坐标,行坐标不变leftColCoordinate = y + 1;}leftColCoordinate = 0;//更新下子块左上角的行坐标leftRowCoordinate = x + 1;}return resimg;
}
//对图像进行放大
Mat imgUp_2(const Mat& srcimg, double kx, double ky)
{int nrows = srcimg.rows * kx;int ncols = srcimg.cols * ky;Mat resimg(nrows, ncols, srcimg.type());int leftRowCoordinate = 0;int leftColCoordinate = 0;for (int i = 0; i < nrows; i++){int x = i / kx;for (int j = 0; j < ncols; j++){int y = j / ky;//resimg.at<Vec3b>(i, j) = areaAverage(srcimg, Point_<int>(leftRowCoordinate, leftColCoordinate), Point_<int>(x, y));resimg.at<Vec3b>(i, j) = srcimg.at<Vec3b>(x, y);leftColCoordinate = y + 1;}leftColCoordinate = 0;leftRowCoordinate = x + 1;}return resimg;
}int main()
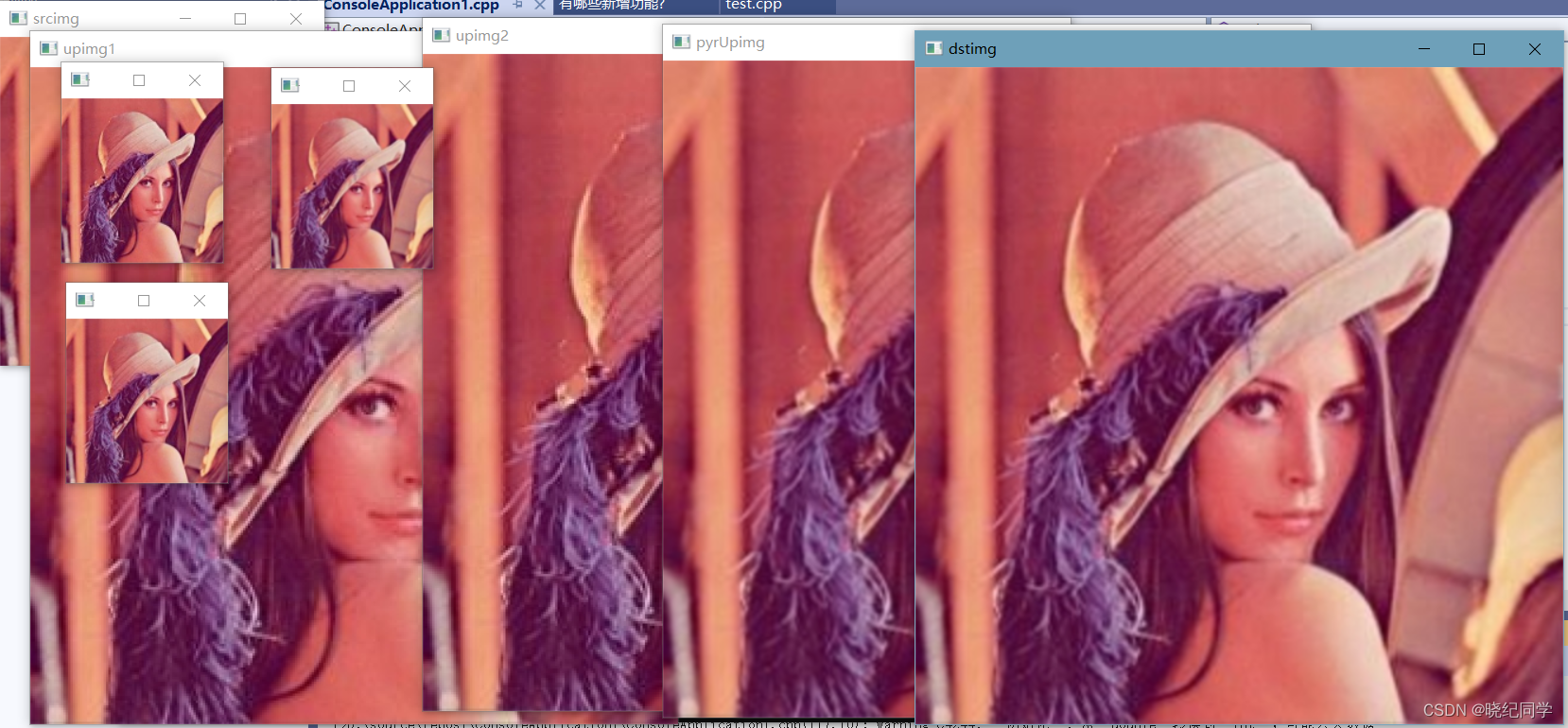
{//Mat srcimg = imread("C:\\Users\\H\\Desktop\\1.png");Mat srcimg = imread("E:\\Lena.jpg");if (srcimg.empty()){return -1;}imshow("srcimg", srcimg);//自定义图像缩放模式Mat upimg1 = imgUp_1(srcimg, 2, 2);imshow("upimg1", upimg1);Mat resimg1 = imgDown_1(srcimg, 0.5, 0.5);imshow("resimg1", resimg1);Mat resimg2 = imgDown_2(srcimg, 0.5, 0.5);imshow("resimg2", resimg2);Mat upimg2 = imgUp_2(srcimg, 2, 2);imshow("upimg2", upimg2);//图像金子塔实现图像的缩放Mat pyrDownimg;pyrDown(srcimg, pyrDownimg);imshow("pyrDownimg", pyrDownimg);Mat pyrUpimg;pyrUp(srcimg, pyrUpimg);imshow("pyrUpimg", pyrUpimg);//resize方式实现图像的缩放Mat dstimg;const double scaleVal = 2;//resize(srcimg, dstimg, Size(srcimg.cols*0.5, srcimg.rows*0.5));resize(srcimg, dstimg, Size(srcimg.cols * 2, srcimg.rows * 2));imshow("dstimg", dstimg);waitKey(0);return 0;
}
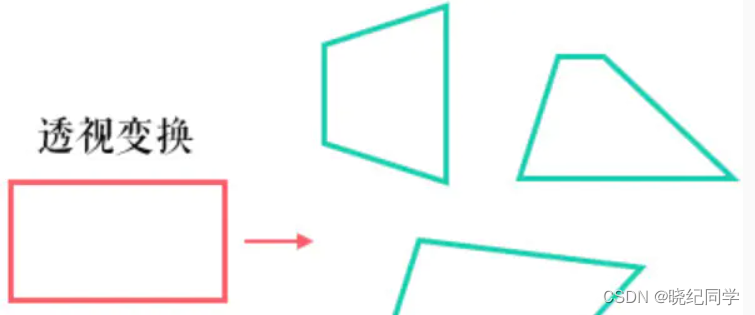
7.透视变换
仿射变换后依然是平行四边形,并不能做到任意的变换。
#7.1 透视变换原理
透视变换(Perspective Transformation)是将二维的图片投影到一个三维视平面上,然后再转换到二维坐标下,所以也称为投影映射(Projective Mapping)。简单来说就是二维→三维→二维的一个过程。
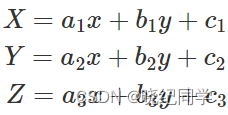
透视变换公式:
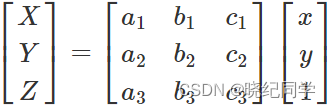
透视变换矩阵表示:
仿射变换是透视变换的子集。接下来再通过除以Z轴转换成二维坐标:
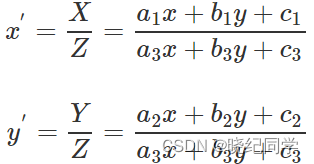
透视变换中的三维->二维
透视变换相比仿射变换更加灵活,变换后会产生一个新的四边形,但不一定是平行四边形,所以需要非共线的四个点才能唯一确定,原图中的直线变换后依然是直线。因为四边形包括了所有的平行四边形,所以透视变换包括了所有的仿射变换。
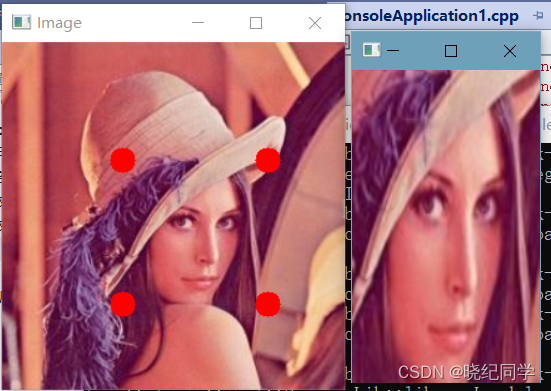
7.2 实现透视变换
int main() {string path = "E:\\Lena.jpg";Mat img = imread(path);float w = 150, h = 250;Mat matrix, imgWarp;Point2f src[4] = { {96,94},{212,94},{96,209},{212,209} };Point2f dst[4] = { {0.0f,0.0f},{w,0.0f},{0.0f,h},{w,h} };matrix = getPerspectiveTransform(src, dst);warpPerspective(img, imgWarp, matrix, Point(w, h));for (int i = 0; i < 4; i++){circle(img, src[i], 10, Scalar(0, 0, 255), FILLED);}imshow("Image", img);imshow("Image Warp", imgWarp);waitKey(0);return 0;
}
(1)Mat getPerspectiveTransform(const Point2f* src, const Point2f* dst)//参数const Point2f* src:原图的四个固定顶点//参数const Point2f* dst:目标图像的四个固定顶点//返回值:Mat型变换矩阵,可直接用于warpAffine()函数//注意,顶点数组长度超4个,则会自动以前4个为变换顶点;数组可用Point2f[]或Point2f*表示//注意:透视变换的点选取变为4个(2)C++ void warpPerspective(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())//参数InputArray src:输入变换前图像//参数OutputArray dst:输出变换后图像,需要初始化一个空矩阵用来保存结果,不用设定矩阵尺寸//参数InputArray M:变换矩阵,用另一个函数getAffineTransform()计算//参数Size dsize:设置输出图像大小//参数int flags = INTER_LINEAR:设置插值方式,默认方式为线性插值(另一种WARP_FILL_OUTLIERS)
相关文章:
Opencv-C++笔记 (16) : 几何变换 (图像的翻转(镜像),平移,旋转,仿射,透视变换)
文章目录 一、图像平移二、图像旋转2.1 求旋转矩阵2.2 求旋转后图像的尺寸2.3手工实现图像旋转2.4 opencv函数实现图像旋转 三、图像翻转3.1左右翻转3.2、上下翻转3.3 上下颠倒,左右相反 4、错切变换4.1 实现错切变换 5、仿射变换5.1 求解仿射变换5.2 OpenCV实现仿射…...
第十次CCF计算机软件能力认证
第一题:分蛋糕 小明今天生日,他有 n 块蛋糕要分给朋友们吃,这 n 块蛋糕(编号为 1 到 n)的重量分别为 a1,a2,…,an。 小明想分给每个朋友至少重量为 k 的蛋糕。 小明的朋友们已经排好队准备领蛋糕,对于每个朋…...
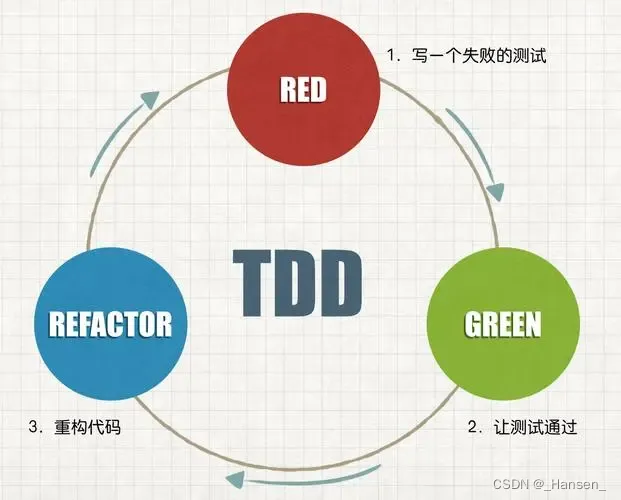
【敏捷开发】测试驱动开发(TDD)
测试驱动开发(Test-Driven Development,简称TDD)是敏捷开发模式中的一项核心实践和技术,也是一种设计方法论。TDD有别于以往的“先编码,后测试”的开发模式,要求在设计与编码之前,先编写测试脚本…...
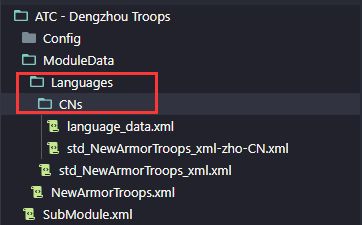
骑砍二 ATC MOD 使用教程与应用案例解析
骑砍二 ATC MOD 使用教程与应用案例解析 作者:blibli-财不外漏 / NEXUSMODS-PuepleKarmen 案例MOD依赖:ATC - Adonnay’s Troop Changer & AEW - Adonnay’s Exotic Weaponry & New Armor 文本编辑工具:VS Code(推荐使用&…...

python和c语言哪个好上手,c语言和python语言哪个难
大家好,本文将围绕python和c语言哪个更值得学展开说明,python语言和c语言哪个简单是一个很多人都想弄明白的事情,想搞清楚c语言和python语言哪个难需要先了解以下几个事情。 前言 新手最容易拿来讨论的三个语言,具体哪个好&#x…...
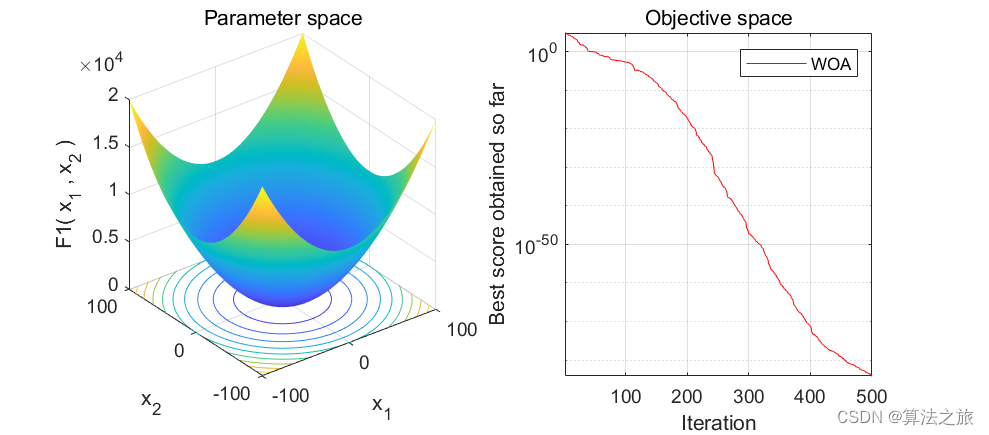
智能优化算法 | Matlab实现鲸鱼优化算法(Whale Optimization Algorithm)(内含完整源码)
文章目录 效果一览文章概述研究内容源码设计参考资料效果一览 文章概述 智能优化算法 | Matlab实现鲸鱼优化算法(Whale Optimization Algorithm)(内含完整源码) 研究内容 步骤 1:设置鲸鱼数量 N 和算法的最大迭代次数 tmax,初始化位置信息; 步骤 2:计算每条鲸鱼的适应度,…...

Android随笔-VPN判断
Android中判断当前网络是否为VPN /*** 判断当前网络是否为VPN* param context* return*/public static boolean hasVPN(Context context) {// 查询网络状态,被动监听网络状态变化ConnectivityManager cm (ConnectivityManager) context.getSystemService(Context.C…...
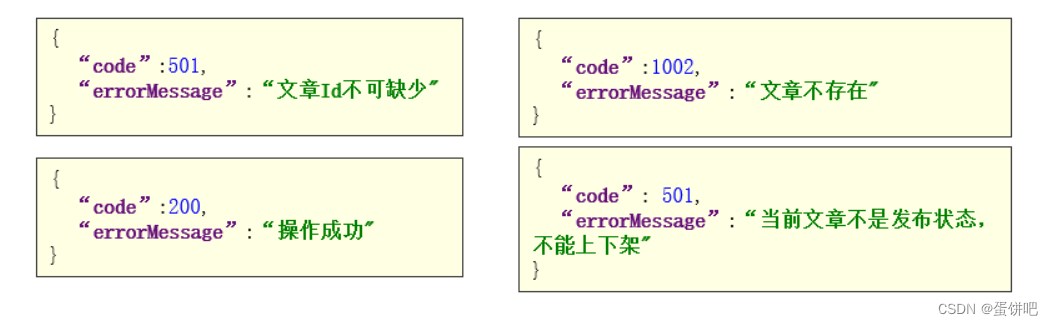
【黑马头条之kafka及异步通知文章上下架】
本笔记内容为黑马头条项目的kafka及异步通知文章上下架部分 目录 一、kafka概述 二、kafka安装配置 三、kafka入门 四、kafka高可用设计 1、集群 2、备份机制(Replication) 五、kafka生产者详解 1、发送类型 2、参数详解 六、kafka消费者详解 1、消费者…...
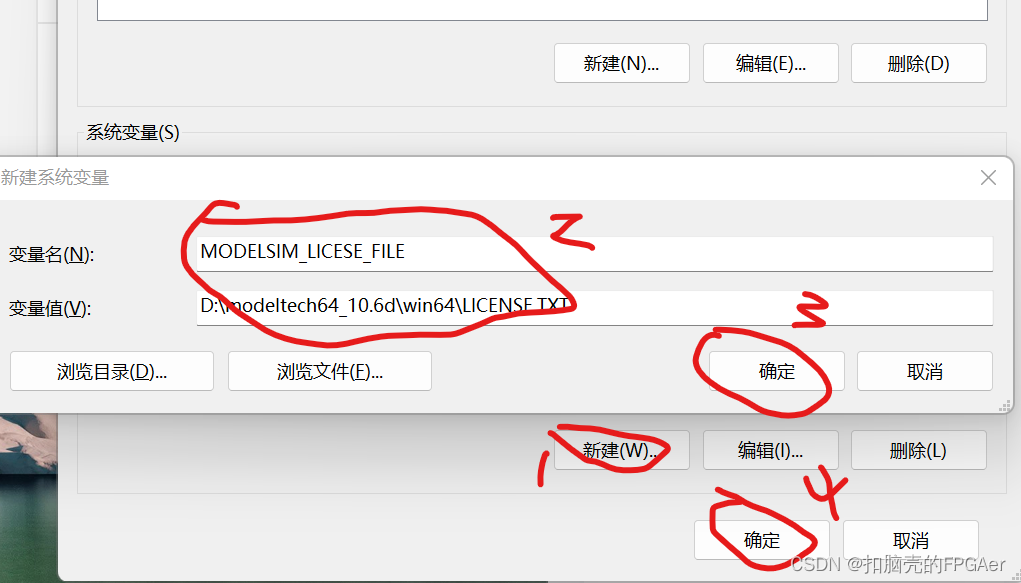
Modelsim打开后报unable to checkout a viewer license
找到Modelsim安装包中的MentorKG.exe文件和patch64_dll.bat文件,将这两个文件拷贝到Modelsim安装目录中的win64文件夹: 在win64文件夹中找到mgls64.dll,将它拷贝粘贴一份后修改名字为mgls.dll: 双击win64文件夹中的patch64_dll.ba…...
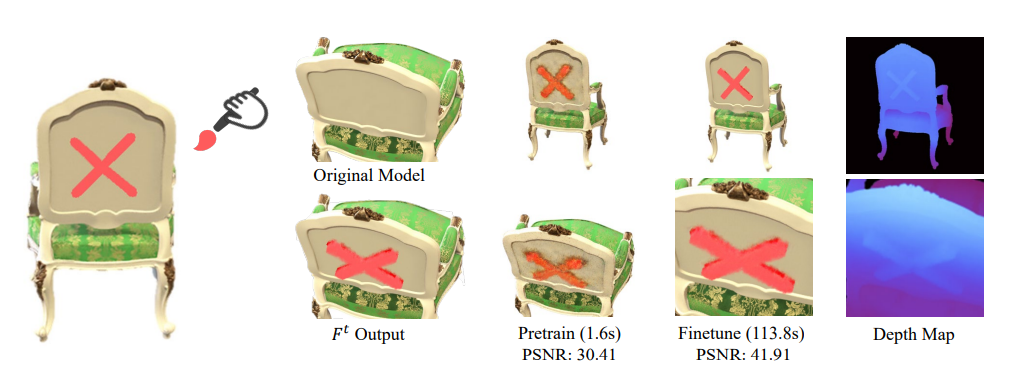
计算机视觉与图形学-神经渲染专题-Seal-3D(基于NeRF的像素级交互式编辑)
摘要 随着隐式神经表示或神经辐射场 (NeRF) 的流行,迫切需要与隐式 3D 模型交互的编辑方法,以完成后处理重建场景和 3D 内容创建等任务。虽然之前的作品从不同角度探索了 NeRF 编辑,但它们在编辑灵活性、质量和速度方面受到限制,无…...

synchronized的底层实现原理
技术主题 synchronized 是 Java 中用于实现线程同步的关键字。它的底层原理涉及到对象头、Monitor(监视器)和内存屏障等概念。 技术原理 技术一:对象头 对象头:每个 Java 对象在内存中都有一个对象头,用于存储对象的元数据信息,比如对象的哈希码、GC 信息以及锁状态等…...
屏幕取色器Mac版_苹果屏幕取色工具_屏幕取色器工具
Sip for Mac 是Mac系统平台上的一款老牌的颜色拾取工具,是设计师和前端开发工作者必不可少的屏幕取色软件,你只需要用鼠标点一下即可轻松地对屏幕上的任何颜色进行采样和编码,并将颜色数据自动存到剪切板,方便随时粘贴出来。 Sip…...
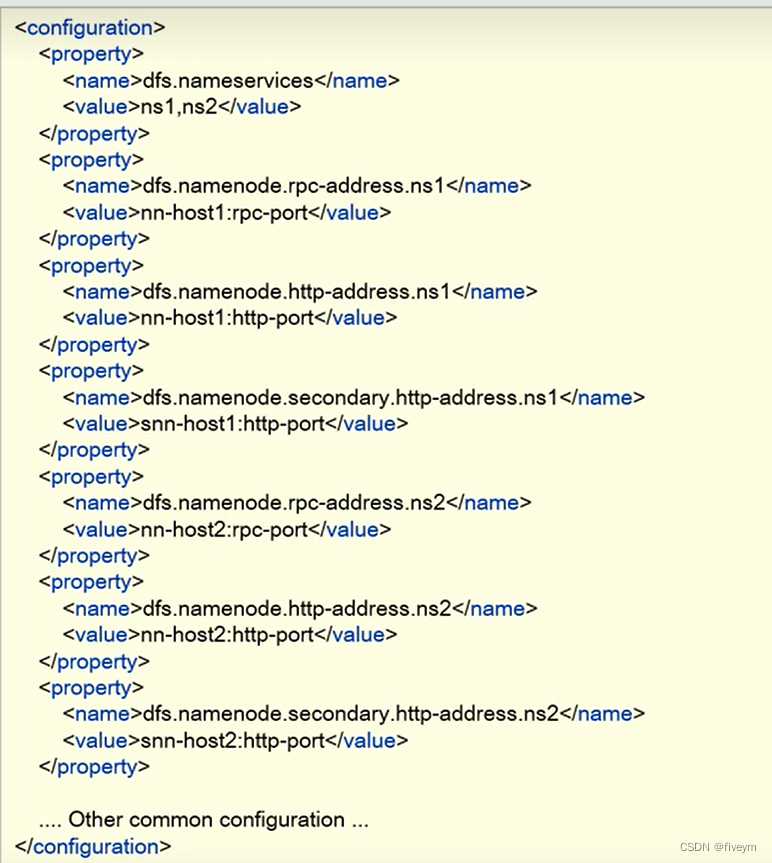
HDFS中的Federation联邦机制
HDFS中的Federation联邦机制 当前HDFS体系架构--简介局限性 联邦Federation架构简介好处配置示例 当前HDFS体系架构–简介 当前的HDFS结构有两个主要的层: 命名空间(namespace) 由文件,块和目录组成的统一抽象的目录树结构。由n…...

Spring Boot 单元测试
目录 1.什么是单元测试? 2.单元测试的优点 3.Spring Boot 单元测试使用 3.1 生成单元测试的类 3.2 添加 Spring Boot 框架测试注解:SpringBootTest 3.3 添加单元测试业务逻辑 3.4 注解 Transactional 4. 断言 1.什么是单元测试? 单元…...

k8s部署nginx访问Tomcat
1.nginx打包镜像 #1、编写DockerFilemkdir /opt/my_nginx_dockerfilecd /opt/my_nginx_dockerfile cat >default.conf<<EOF server {listen 80;listen [::]:80;server_name localhost;#access_log /var/log/nginx/host.access.log main;location / {root …...
springboot配置文件的使用
目录 1.application.properties是springboot默认的配置文件,但是比较繁琐,一般用.yml文件 2. 配置文件的作用 3.配置文件的使用 1.application.properties是springboot默认的配置文件,但是比较繁琐,一般用.yml文件 ①、properti…...

blender 毛发粒子
新建平面,点击右侧粒子系统,选择毛发,调整毛发长度,数量(Number),调整数量是为了避免电脑卡顿; 上面设置的每一根柱子都可以变成一个物体,点击渲染,渲染为选择…...

. 在css中的应用
正好看到一个用 &. 的css语句,感觉不太明白就去查了一下,感觉C站上缺少相关内容,所以这里就来补上一篇 &. 实际上是一种sass语法,在 Sass 中 & 表示父选择器的引用,可以用于创建更具体的选择器࿰…...
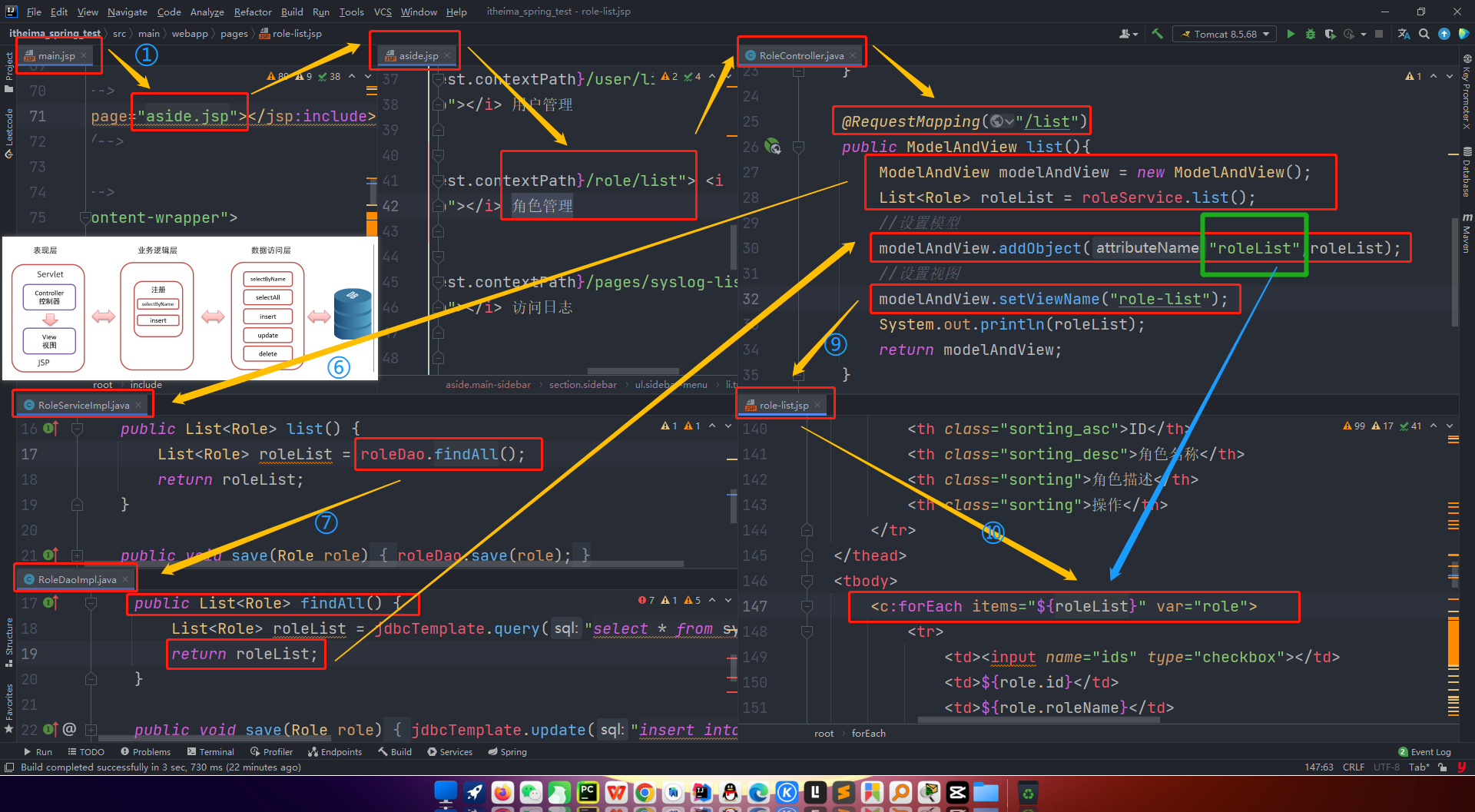
黑马程序员SpringMVC练手项目
目录 1、需求 2、项目准备 pom.xml SQL jdbc.properties log4j.properties applicationContext.xml spring-mvc.xml web.xml 3、工作流程 4、难点 项目已经上传到gitee:https://gitee.com/xzl-it/my-projects 1、需求 SpringMVC项目练习:数…...
)
SQL注入 ❤ ~~~ 网络空间安全及计算机领域常见英语单词及短语——网络安全(二)
SQL注入 ❤ 学网安英语 大白话讲SQL注入SQL注入原理1. 用恶意拼接查询进行SQL注入攻击2. 利用注释执行非法命令进行SQL注入攻击3. 利用传入非法参数进行SQL注入攻击4. 添加额外条件进行SQL注入攻击 时间和布尔盲注时间盲注(Time-Based Blind SQL Injection…...
)
用Python和nilmtk库,5分钟上手非侵入式用电分析(附实战代码)
用Python和nilmtk库,5分钟上手非侵入式用电分析(附实战代码) 当你站在电表前,看着那个不断跳动的数字,是否好奇过家里每台电器究竟消耗了多少电能?传统方法需要在每个电器上安装传感器,既麻烦又…...

Arm SVE指令集详解:条件选择与向量操作优化
1. SVE指令集概述与背景SVE(Scalable Vector Extension)是Arm架构中的可扩展向量指令集扩展,它为高性能计算和数据密集型应用提供了强大的并行处理能力。与传统SIMD指令集不同,SVE的最大特点是其向量长度不可知(Vector…...
)
瑞萨RA系列MCU入门实战:用e2 studio和FSP库5分钟点灯(从安装到烧录)
瑞萨RA系列MCU五分钟极速入门:从零点亮LED的全流程解析 当一块全新的瑞萨RA系列开发板第一次在你手中亮起LED时,那种"Hello World"式的成就感往往能瞬间点燃学习热情。不同于传统教程按部就班的软件安装介绍,本文将带您体验实战驱…...

前后端分离项目避坑指南:为什么你的网关CORS配置了还是报跨域错误?
前后端分离项目避坑指南:为什么你的网关CORS配置了还是报跨域错误? 在前后端分离架构中,跨域资源共享(CORS)问题一直是开发者绕不开的"拦路虎"。即便在网关层正确配置了CORS规则,开发者仍可能遇到…...

phpenv故障排除终极指南:解决PHP版本管理中的10大常见问题
phpenv故障排除终极指南:解决PHP版本管理中的10大常见问题 【免费下载链接】phpenv Simple PHP version management 项目地址: https://gitcode.com/gh_mirrors/ph/phpenv phpenv是一款简单而强大的PHP版本管理工具,专为PHP开发者设计,…...

用51单片机+DAC0832做个信号发生器:5种波形可调,附Proteus仿真和Keil源码
51单片机DAC0832信号发生器实战指南:从硬件搭建到波形调频 在电子设计领域,信号发生器是基础但极其重要的工具。传统商用设备往往价格昂贵且功能固定,而基于51单片机和DAC0832的自制信号发生器不仅成本低廉,还能根据需求灵活定制。…...

DeepSeek总结的CloudNativePG 与 Crunchy PGO:一个诚实且带有主观见解的比较
来源:https://www.gabrielebartolini.it/articles/2026/05/cloudnativepg-and-crunchy-pgo-an-honest-opinionated-comparison/ CloudNativePG 与 Crunchy PGO:一个诚实且带有主观见解的比较 作者: Gabriele Bartolini 日期: 2026年5月18日 目录 Crunchy…...

WeChatExporter终极指南:三步破解iOS微信数据备份的技术迷思
WeChatExporter终极指南:三步破解iOS微信数据备份的技术迷思 【免费下载链接】WeChatExporter 一个可以快速导出、查看你的微信聊天记录的工具 项目地址: https://gitcode.com/gh_mirrors/wec/WeChatExporter 你是否曾因误删重要微信聊天记录而懊恼不已&…...
)
AI 编程能力实战基准测试报告:编程能力评估体系 (Programming Capability Benchmark)
🤖 AI 编程能力实战基准测试报告:编程能力评估体系 (Programming Capability Benchmark) 文件目标: 一份用于评估当前顶级生成式模型(如GPT-5.5, Claude 4.7, Deepseek V4等)实际软件开发能力和系统级思维的权威指南。 核心原则: …...

基于WiFi与OPC协议的可穿戴LED灯光同步系统设计与实现
1. 项目概述:打造你的无线光影秀发想象一下,你亲手制作的LED帽子、发光外套,甚至是手中的光绘道具,都能随着你电脑屏幕上的音乐可视化效果或视频内容同步闪烁、流动。无需复杂的编程,只需一个简单的播放指令࿰…...