【C++】Bullet3代码存档
之前试了一下Bullet3物理引擎,但在linux上编译失败,于是放弃了。令我不满的还有另外一个原因,下载的发行包竟然有500M。C++的Bullet3代码根本用不了,大部分教程实际都是用的老版本。而且此项目还整了python版本,各种蹭人工智能的热度,感觉后面的维护者越来越不靠谱了。
于是我准备换用ode引擎,下面对bullet3的简单使用记录一下。
一、配置
# bullet3
# 3实际上没有教程,似乎已经弃坑(这里使用2的版本)
# https://github.com/bulletphysics/bullet3/issues/4002
include_directories(${CMAKE_SOURCE_DIR}/third/bullet3/src)
target_link_libraries(${PROJECT_NAME} PRIVATE LinearMath)
target_link_libraries(${PROJECT_NAME} PRIVATE BulletCollision)
target_link_libraries(${PROJECT_NAME} PRIVATE BulletDynamics)在CMakePresets.json里需要加入以下变量到cacheVariables,关闭其他东西的构建:
"BUILD_EXTRAS": false,
"BUILD_UNIT_TESTS": false 二、使用
/**
* @file dl_physics.h
* @brief 3d物理,基于Bullet3
*
*
* @version 1.0
* @author lveyou
* @date 22-10-28
*
* @note
*/
#pragma once#include <vector>#include <btBulletDynamicsCommon.h>#include "dl_type.h"
#include "math/dl_transform.h"
#include "dl_time.h"
#include "dl_rigid_body.h"//Extras / BulletMultiThreaded 拥有多线程版本 碰撞调度和 解算器namespace dl
{inline btVector3 toBtVector3(const Position3& v)
{return btVector3(v[0], v[1], v[2]);
}class RigidBodyImp
{
public:btRigidBody* _rigidBody;btMotionState* _motion;//运动状态,可选 动态物体才有size_t _idShape;//形状id
};class Physics
{
public:btDefaultCollisionConfiguration* _collConfig;//碰撞配置btCollisionDispatcher* _collDispatcher;//碰撞调度btBroadphaseInterface* _broadphase;//broad-phasebtSequentialImpulseConstraintSolver* _solver;//解算器btDiscreteDynamicsWorld* _world;//世界std::vector<btCollisionShape*> _allShape;//所有形状Physics(){_collConfig = new btDefaultCollisionConfiguration;_collDispatcher = new btCollisionDispatcher(_collConfig);_broadphase = new btDbvtBroadphase;_solver = new btSequentialImpulseConstraintSolver;_world = new btDiscreteDynamicsWorld(_collDispatcher, _broadphase, _solver, _collConfig);_world->setGravity(btVector3(0, 0, -Numbers::GRAVITY));btCollisionShape* shape = new btBoxShape(btVector3(1, 1, 1));_allShape.push_back(shape);}/*** @brief 创建刚体* @param[in] shape_id 形状id* @param[in] trans 变换* @param[in] mass 质量* @retval 失败返回nullptr*/RigidBody* CreateRigidBody(size_t shape_id, Transform* trans, Float mass){if (shape_id >= _allShape.size()){log_err0("shape id越界!");return nullptr;}RigidBody* ret = new RigidBody;RigidBodyImp* body = ret->GetImp();//形状body->_idShape = shape_id;btCollisionShape* shape = _allShape[shape_id];//运动状态btTransform bt_trans;bt_trans.setIdentity();Position3 pos = trans->GetTranslation();bt_trans.setOrigin(toBtVector3(pos));body->_motion = new btDefaultMotionState(bt_trans);//质量和惯性btScalar bt_mass{ mass };btVector3 local_inertia(0, 0, 0);if (bt_mass)shape->calculateLocalInertia(bt_mass, local_inertia);//创建刚体body->_rigidBody = new btRigidBody(bt_mass, body->_motion, shape);//加入世界_world->addRigidBody(body->_rigidBody);return ret;}//! 创建默认刚体RigidBody* CreateRigidBodyDefault(Transform* trans){return CreateRigidBody(0, trans, 1);}//! 创建形状 boxsize_t CreateShapeBox(const Position3& box){size_t id = _allShape.size();btCollisionShape* shape = new btBoxShape(toBtVector3(box));_allShape.push_back(shape);return id;}void Update(){_world->stepSimulation(g_time->GetDelta());//更新位置/*for (int j = _world->getNumCollisionObjects() - 1; j >= 0; j--){btCollisionObject* obj = _world->getCollisionObjectArray()[j];btRigidBody* body = btRigidBody::upcast(obj);btTransform trans;if (body && body->getMotionState()){body->getMotionState()->getWorldTransform(trans);}else{trans = obj->getWorldTransform();}trans.getOpenGLMatrix()printf("world pos object %d = %f,%f,%f\n", j, float(trans.getOrigin().getX()), float(trans.getOrigin().getY()), float(trans.getOrigin().getZ()));}*/}void UpdateRigidBody(RigidBodyImp* body, Transform* trans){btTransform bt_trans;btRigidBody* bt_body = body->_rigidBody;if (bt_body->getMotionState()){bt_body->getMotionState()->getWorldTransform(bt_trans);}else{bt_trans = bt_body->getWorldTransform();}const btVector3& pos = bt_trans.getOrigin();trans->SetTranslation({pos.getX(), pos.getY(), pos.getZ()});}~Physics(){//反向删除for (int i = _world->getNumCollisionObjects() - 1; i >= 0; --i){btCollisionObject* obj = _world->getCollisionObjectArray()[i];btRigidBody* body = btRigidBody::upcast(obj);if (body && body->getMotionState()){delete body->getMotionState();}_world->removeCollisionObject(obj);delete obj;}for (auto& iter : _allShape){delete iter;}delete _world;delete _solver;delete _broadphase;delete _collDispatcher;delete _collConfig;}
};extern Physics* g_physics;}
相关文章:

【C++】Bullet3代码存档
之前试了一下Bullet3物理引擎,但在linux上编译失败,于是放弃了。令我不满的还有另外一个原因,下载的发行包竟然有500M。C的Bullet3代码根本用不了,大部分教程实际都是用的老版本。而且此项目还整了python版本,各种蹭人…...

弘扬“两弹一星”精神,勇攀科学技术高峰——道本科技商业大学党日活动圆满落幕
2023年8月2日,道本科技与商业大学携手举办了一场主题为“弘扬‘两弹一星’精神,勇攀科学技术高峰”的党日活动。本次活动旨在了解党领导下的中国核工业发展历程,传承和弘扬“两弹一星”精神,同时展示道本科技创新产品,…...

Java中创建对象的几种方式
背景 面试的时候有些面试官喜欢问这些, 这里简单记录一下. 常见方式 方式1: new XXXX(); 使用new关键字:这是最常见的创建对象的方式,使用new关键字后面跟上类名和参数列表(如果有),可以调用类的构造方法来创建对象…...
Python(三)
诚信像一面镜子,一旦打破,你的人格就会出现裂痕。 存在短路的情景 谢谢观看 Python(三)...

android 如何分析应用的内存(十五)——Visual Studio Code 调试Android应用
android 如何分析应用的内存(十五)——Visual Studio Code 调试Android 应用 在上一篇文章介绍了jdb调试java应用 接下来介绍用UI界面调试java应用,达到同jdb一样的效果。 同样的UI界面有很多选择,如Eclipse,Android …...

宁波银行最新内推码 MK4913
宁波银行最新内推码 MK4913 内推码: MK4913 内推二维码 : 网申路径: 网页端:登录宁波银行招聘官网: https://zhaopin.nbcb.com.cn 选择【校园招聘】-【招聘岗位】手机端:关注【宁波银行招聘】公众号&a…...
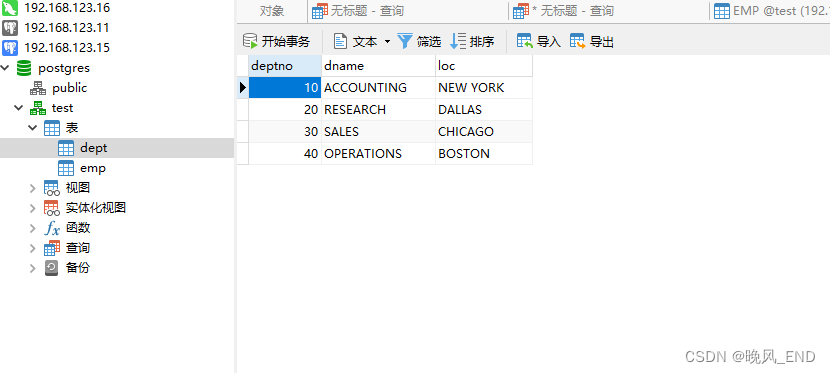
postgresql|数据库|MySQL数据库向postgresql数据库迁移的工具pgloader的部署和初步使用
前言: MySQL数据库和postgresql数据库之间的差异并不多,这里的差异指的是对SQL语言的支持两者并不大,但底层的东西差异是非常多的,例如,MySQL的innodb引擎概念,数据库用户管理,这些和postgresq…...

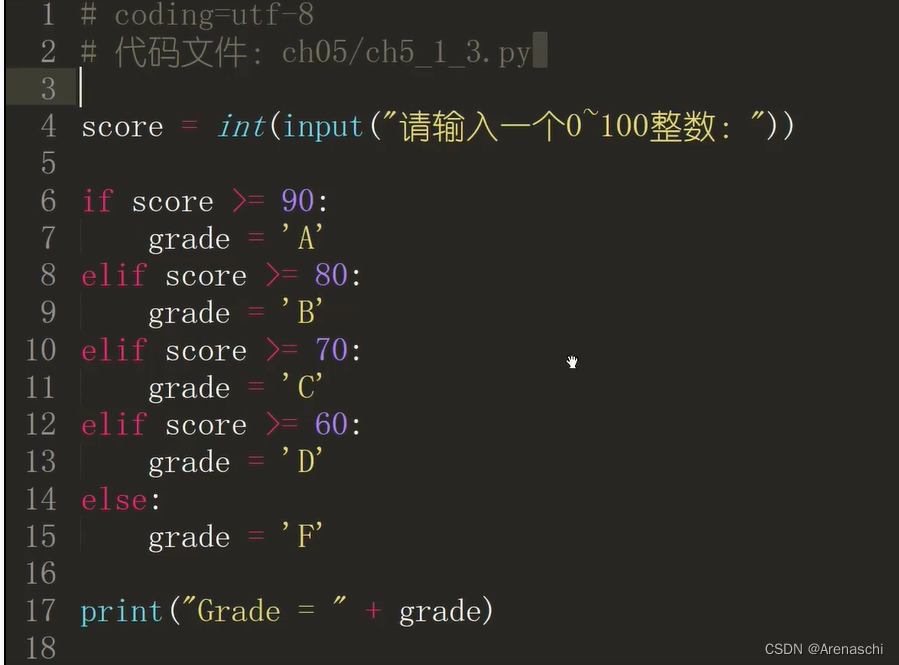
【Python从小白到高手】---函数基础
个人主页:平行线也会相交 欢迎 点赞👍 收藏✨ 留言✉ 加关注💓本文由 平行线也会相交 原创 收录于专栏【Python小白从入门到精通】🎈 本专栏旨在分享学习Python的一点学习心得,欢迎大家在评论区讨论💌 目录…...
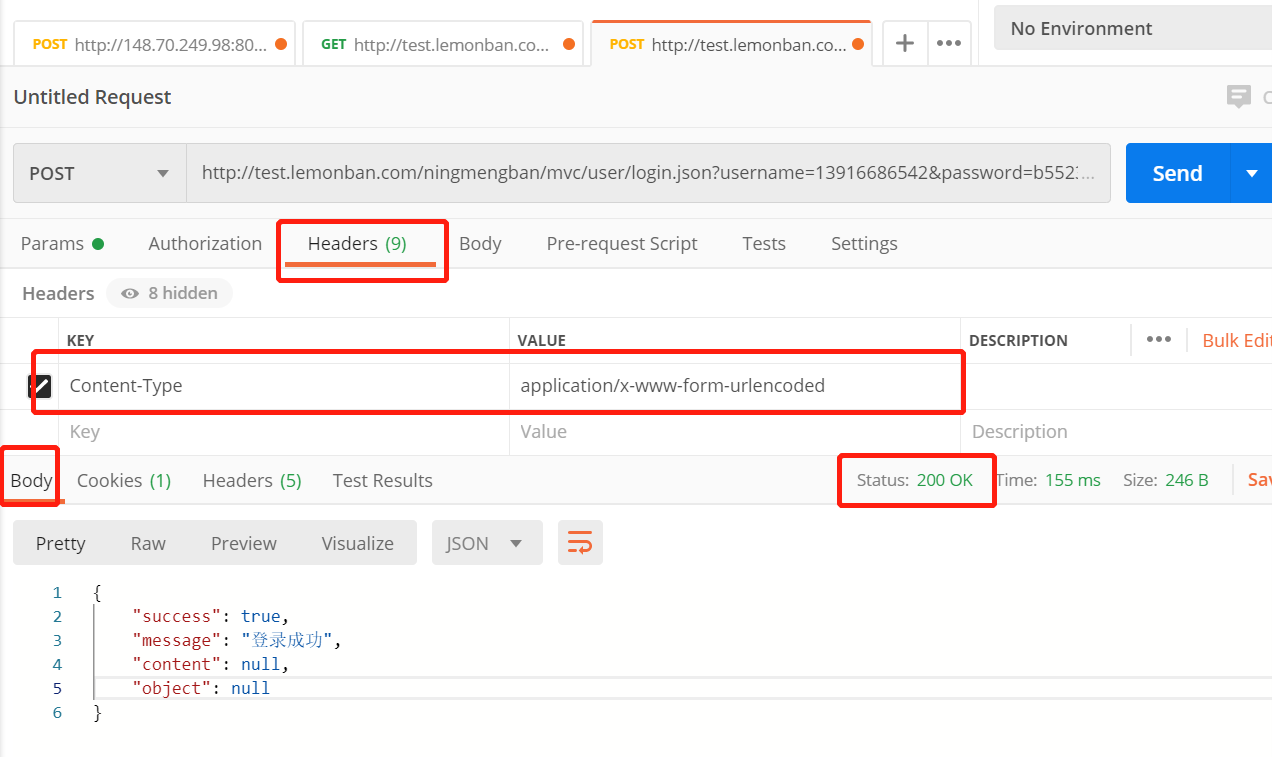
postman----传参格式(json格式、表单格式)
本文主要讲解postman使用post请求方法的2中传参方式:json格式、表单格式 首先了解下,postman进行接口测试,必须条件是: ♥请求地址 ♥请求协议 ♥请求方式 ♥请求头 ♥参数 json格式 先看一下接口文档,根据接口文档&…...
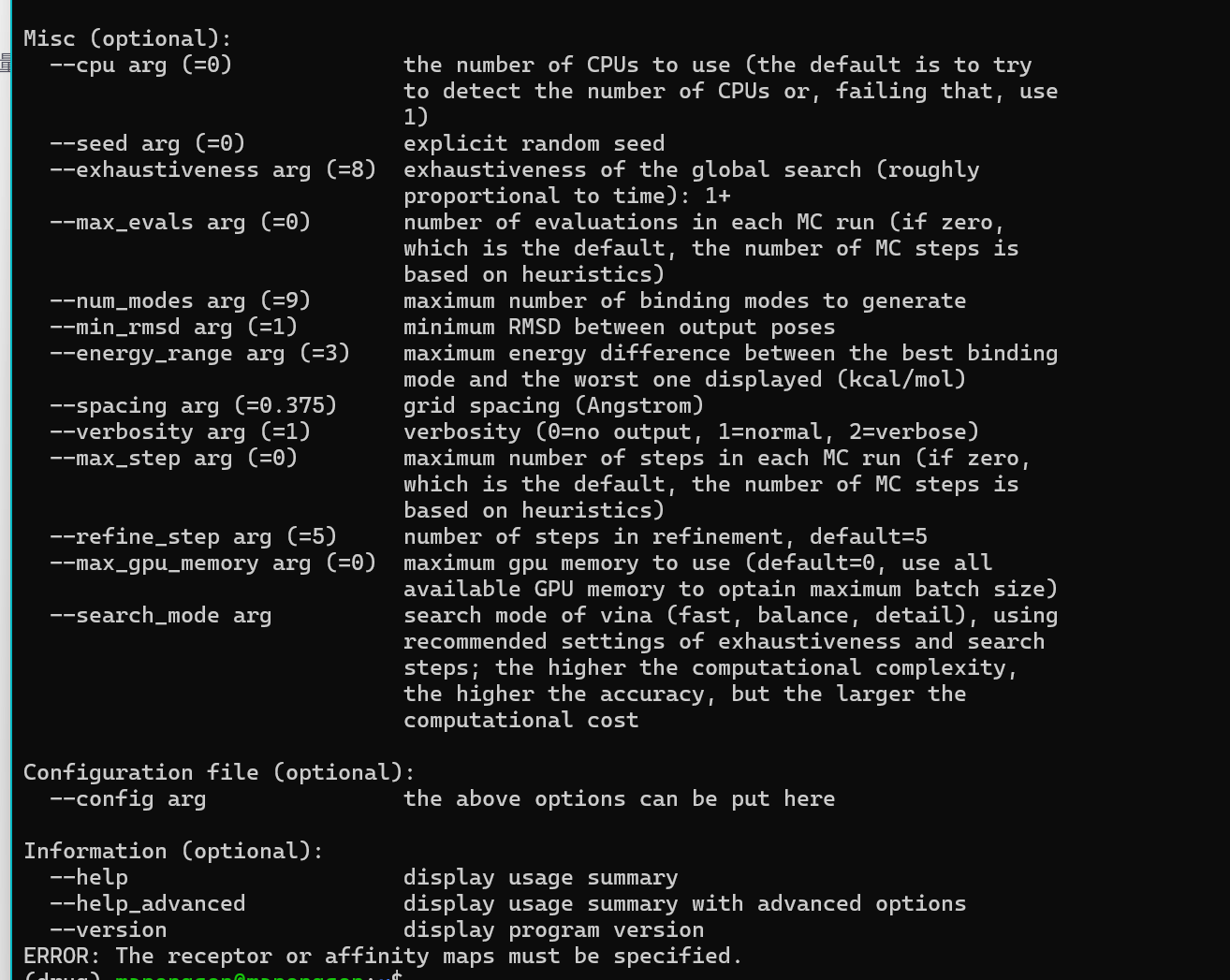
Uni-Dock:GPU 分子对接使用教程
github文件下载: git clone https://github.com/dptech-corp/Uni-Dock.git cd Uni-Dock/example/screening_test wget https://github.com/dptech-corp/Uni-Dock/releases/download/1.0.0/unidock 将此文件加入到全局变量中 chmod x unidock sudo mv unidock /…...
【Python】数据分析+数据挖掘——掌握Python和Pandas中的单元格替换操作
1. 前言 数据处理和清洗是数据分析和机器学习中至关重要的步骤。在数据处理过程中,我们经常需要对数据集进行清洗和转换,其中单元格替换是一个常用的技术。Python作为一种功能强大且灵活的编程语言,为数据处理提供了丰富的工具和库。Pandas库…...
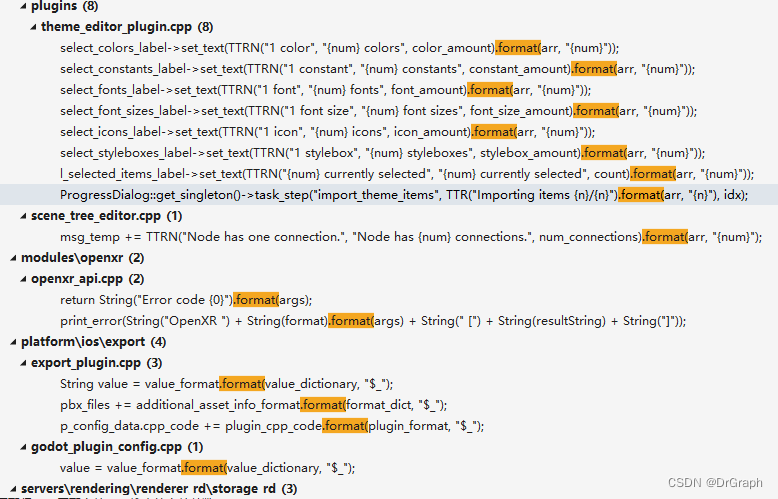
Godot 4 源码分析 - 增加格式化字符串功能
Godot 4的主要字符串类型为String,已经设计得比较完善了,但有一个问题,格式化这块没怎么考虑。 String中有一个format函数,但这个函数只有两个参数,这咋用? String String::format(const Variant &va…...
C#中XML文档与Treeview控件操作的数据同步
在前文《C#使用XML和Treeview结合实现复杂数据采集功能》中,使用Treeview展示了XML的数据,问题是如果在Treeview上进行了操作,怎样同步更改XML数据的内容呢? 这个问题看似简单,实现起来有一点小麻烦。 要实现的操作功能…...
【Java Web基础】mvn命令、Maven的安装与配置
本文极大程度上来自Maven安装(超详解),但是担心安的过程中遇到什么不一样的问题,顺便加深印象,所以还是打算自己弄一篇。 目录 第一步:Download Maven第二步:解压与安装2.1 解压2.2 安装 第一步:Download …...
加强Web应用程序安全:防止SQL注入
数据库在Web应用程序中存储和组织数据时起着至关重要的作用,它是存储用户信息、内容和其他应用程序数据的中央存储库。而数据库实现了高效的数据检索、操作和管理,使Web应用程序能够向用户提供动态和个性化的内容。然而,数据库和网络应用程序…...
【云原生】k8s中Contrainer 生命周期回调/策略/指针学习
个人主页:征服bug-CSDN博客 kubernetes专栏:kubernetes_征服bug的博客-CSDN博客 目录 1 容器生命周期 2 容器生命周期回调/事件/钩子 3 容器重启策略 4 自定义容器启动命令 5 容器探针 1 容器生命周期 Kubernetes 会跟踪 Pod 中每个容器的状态&am…...
electron+vue3全家桶+vite项目搭建【25】使用electron-updater自动更新应用
文章目录 引入实现效果实现步骤引入依赖配置electron-buidler文件封装版本升级工具类主进程调用版本更新校验渲染进程封装方法调用 测试版本更新 引入 demo项目地址 electron-updater官网 我们不可能每次发布新的版本都让用户去手动下载安装最新的包,而是应用可以…...
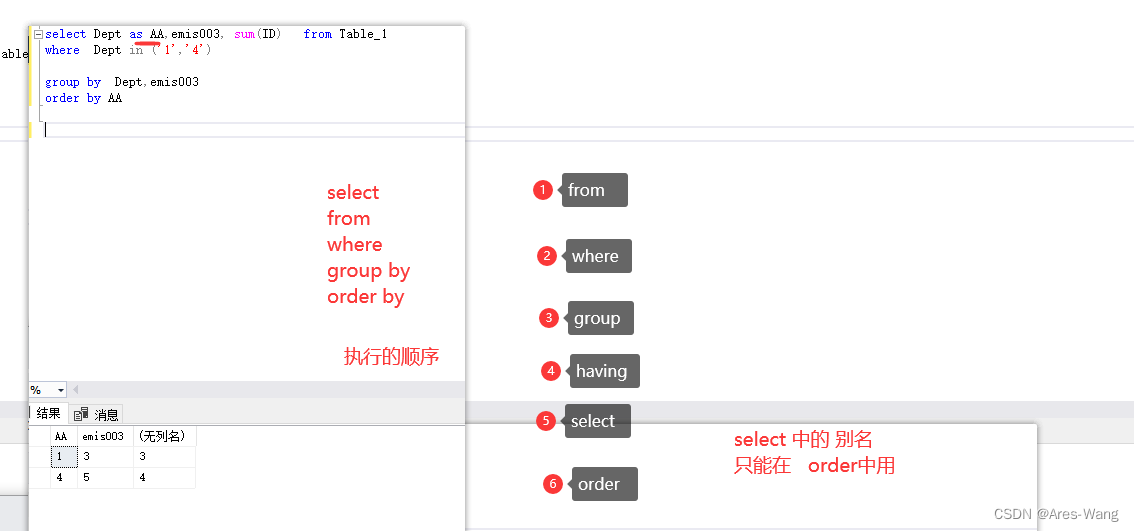
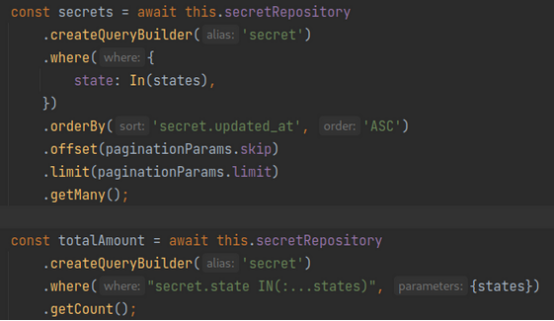
SQL 表别名 和 列别名
列表名 列表名之后 order by 可以用别名 也可以用原名, where 中不能用别名的 SQL语句执行顺序: from–>where–>group by -->having — >select --> order 第一步:from语句,选择要操作的表。 第二步࿱…...

面试之快速学习c++11-函数模版的默认模版参数,可变模版,tuple
//学习地址: http://c.biancheng.net/view/3730.html 函数模版的默认模版参数 在 C98/03 标准中,类模板可以有默认的模板参数,如下: template <typename T, typename U int, U N 0> struct TestTemplateStruct {};但是…...

Visual Studio Code 常见的配置、常用好用插件以及【vsCode 开发相应项目推荐安装的插件】
一、VsCode 常见的配置 1、取消更新 把插件的更新也一起取消了 2、设置编码为utf-8:默认就是了,不用设置了 3、设置常用的开发字体:Consolas, 默认就是了,不用设置了 字体对开发也很重要,不同字体,字母形…...

Windows Cleaner终极指南:3分钟解决C盘爆满,让电脑重获新生![特殊字符]
Windows Cleaner终极指南:3分钟解决C盘爆满,让电脑重获新生!🚀 【免费下载链接】WindowsCleaner Windows Cleaner——专治C盘爆红及各种不服! 项目地址: https://gitcode.com/gh_mirrors/wi/WindowsCleaner 你是…...
)
NotebookLM信息冗余顽疾破解指南(92%用户忽略的3层语义去重机制)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM信息去重的核心挑战与认知重构 NotebookLM 作为 Google 推出的基于用户文档构建的 AI 助手,其核心能力依赖于对上传资料的语义理解与上下文关联。然而,当用户批量导入…...

FreeRTOS互斥信号量实战:用STM32CubeIDE解决多任务访问共享串口的优先级翻转问题
FreeRTOS互斥信号量实战:用STM32CubeIDE解决多任务访问共享串口的优先级翻转问题 在嵌入式系统开发中,多任务并发访问共享资源是一个常见且棘手的问题。想象一下这样的场景:你的STM32设备上有两个任务需要向同一个串口发送数据——一个高优先…...

程序员录音转行动项工具口碑推荐 | 经筛选的实用方案
针对2026年程序员群体的录音转行动项需求,实测多款主流工具后,筛选出实用方案,可有效解决需求对接、会议访谈后,录音整理、任务提取耗时久、准确率不佳的痛点。本次评测选取多款主流办公类录音转写工具,围绕程序员核心…...

【亲测免费】 CISP-DSG 数据安全培训教材课件标准版
CISP-DSG 数据安全培训教材课件标准版 【下载地址】CISP-DSG数据安全培训教材课件标准版 本仓库提供的是“注册数据安全治理专业人员”(Certified Information Security Professional - Data Security Governance,简称 CISP-DSG)的培训教材课…...

修一个Bug,引入另一个Bug:从Tomcat高危漏洞看中间件安全修复的困境
攻击者无需认证,仅需向集群通信端口发送构造数据,即可绕过加密校验并触发反序列化,实现远程代码执行。这个漏洞的特殊之处在于——它是官方修复上一个漏洞时“顺手”引入的。2026年5月,Apache Tomcat官方披露了一个高危漏洞CVE-20…...

AI智能体编排框架Agent-Octo:章鱼架构解析与实战应用
1. 项目概述:当AI智能体遇上“章鱼”架构最近在开源社区里,一个名为purton-tech/agent-octo的项目引起了我的注意。乍一看这个标题,你可能会想,这又是一个AI智能体(Agent)框架。没错,它的核心确…...

Windows Node.js版本管理实战:NVM-Windows配置与部署解决方案
Windows Node.js版本管理实战:NVM-Windows配置与部署解决方案 【免费下载链接】nvm-windows A node.js version management utility for Windows. Ironically written in Go. 项目地址: https://gitcode.com/gh_mirrors/nv/nvm-windows NVM-Windows是Windows…...

Multisim导入自定义三极管S8050/S8550保姆级教程:从SPICE文件到成功仿真
Multisim实战:从零构建S8050三极管模型与仿真验证全流程 在电子电路设计与仿真领域,准确的三极管模型往往是项目成功的关键。许多工程师和爱好者在使用Multisim时都遇到过这样的困境:官方元件库中缺少特定型号的三极管(如常见的S8…...

NotebookLM思维导图生成已进入「语义拓扑时代」:2024Q2最新Benchmark显示其节点关联准确率超越MindNode Pro 41.6%
更多请点击: https://intelliparadigm.com 第一章:NotebookLM思维导图生成已进入「语义拓扑时代」 传统基于关键词共现或规则模板的思维导图生成方式,正被 NotebookLM 的语义理解能力彻底重构。其底层 LLM 模型不再仅识别显式术语关系&#…...