【Paper Reading】DETR:End-to-End Object Detection with Transformers
背景
Transformer已经在NLP领域大展拳脚,逐步替代了LSTM/GRU等相关的Recurrent Neural Networks,相比于传统的RNN,Transformer主要具有以下几点优势
- 可解决长时序依赖问题,因为Transformer在计算attention的时候是在全局维度进行展开计算的,所以不存在长时序中的梯度消失等问题。
- Transformer的encoder和decoder在某些场景下均可以很好的并行化,提高的计算效率。
- Transformer具备比较好的可解释性
- Transformer的可扩展性比较强,可以灵活的增加层数。
在视觉领域也有一些方法逐步的在引入Transformer来解决一些视觉挑战任务,例如基于图片分类的ViT。本文是将Transformer引入目标检测领域中来,可以端到端的解决目标检测的问题,相比于传统基于anchor/proposal/NMS的方法而言,本文的方法主要有以下优势:
- 摆脱了对原有的基于先验知识的依赖,不再依赖proposal/NMS等基于先验的方法,整个网络是完全learnable的,并且简化了整体的pipeline。
- 相比于NMS,可以在全局视角考虑整体的最优性,消除整体的冗余。
方法
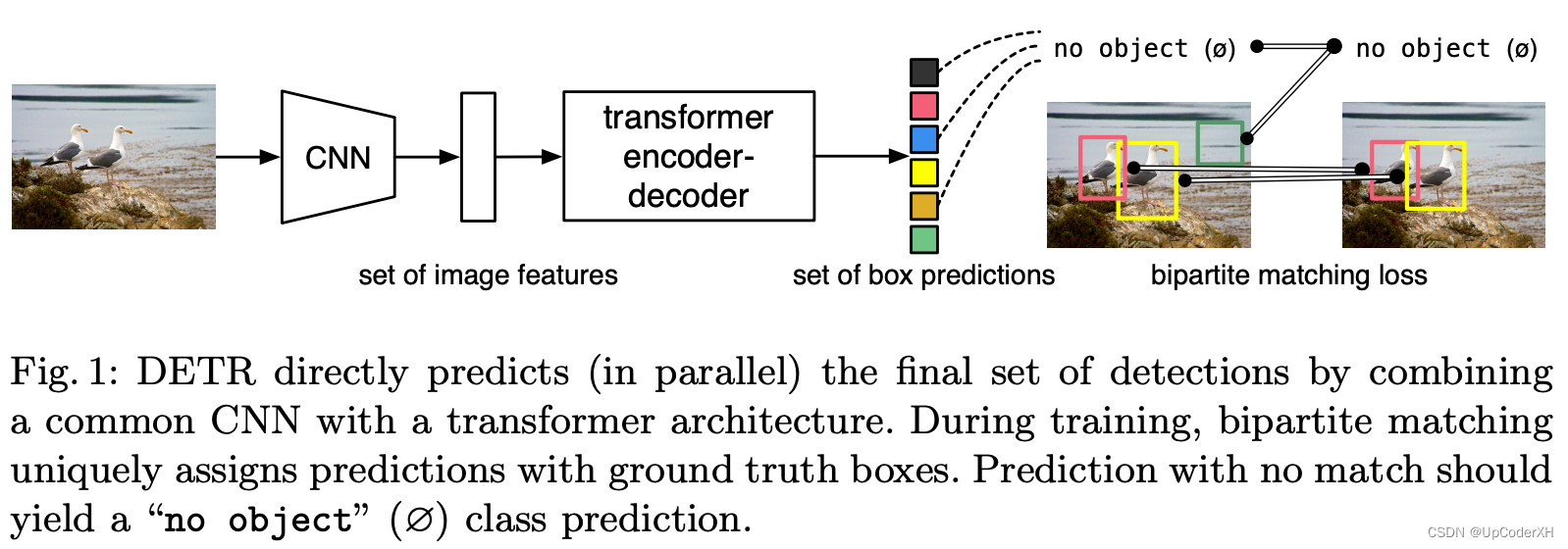
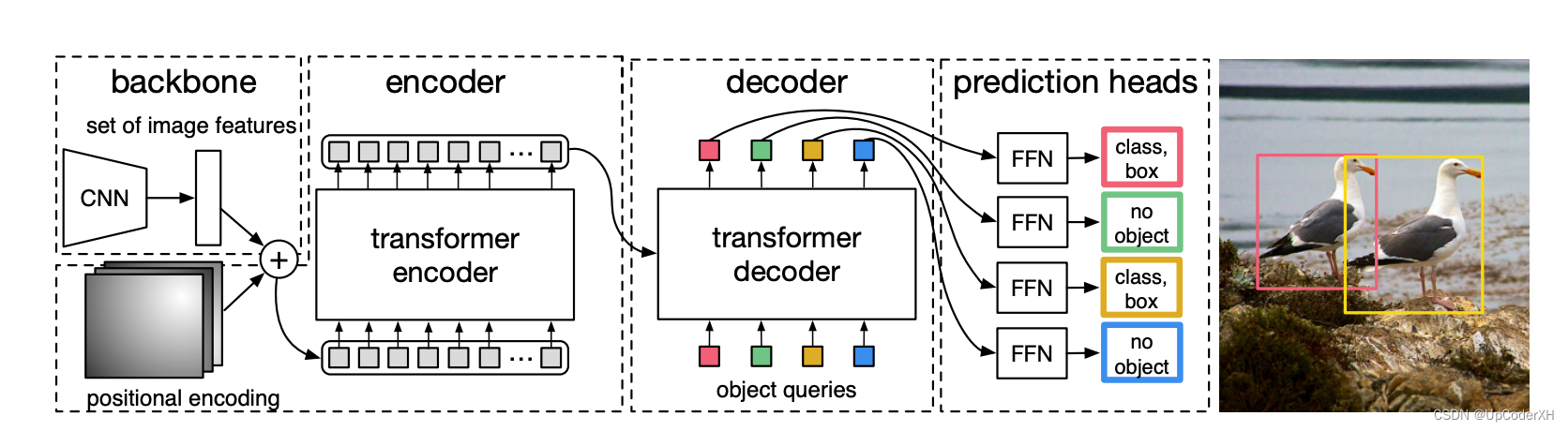
本文提出的网络结构整体上如下图所示。接下来我们将从网络结构、损失函数和匹配方法分别展开介绍
网络结构
整体的网络结构如上图所示,一张图片我们通过CNN抽取其基本的视觉特征(待讨论能不能像ViT那样,做到完全的Transformer)。得到feature map F ∈ R H × W × C F \in R^{H \times W \times C} F∈RH×W×C,然后我们将其reshape成为 F ∈ R ( H × W ) × C F \in R^{(H \times W) \times C} F∈R(H×W)×C。那么我们就得到一个长度为 H × W H \times W H×W的序列,每个unit的维度的是 C C C。
我们再将得到的序列输入到transformer的encoder进行特征的加工,相当于重构每个unite的表征,使其可以从全局的视角加载特征和。这里的unit相当于就是“Proposal”。
Encoder输出后的feature再会输入给decoder,decoder基于Encoder的特征和位置编码特征输出每个位置应该预测的proposal。如下图所示,object queries就是每个position的embedding。
-
QA1:Encoder和Decoder的position embedding是不是一样的?
- 答案是不一样的,Encoder的position embedding可以理解是二维的,他针对feature map上的每一个位置进行embedding。而Decoder中的position embedding是“proposal”维度的,先验是一张图片最多会有100个框,所以Decoder中最多会有100个position。Decoder的position embedding是lookup 查表得到的,整体上第一个position代表什么含义?是否有说明?
- 具体实现上,object queries是 N(100) 个learnable embedding,训练刚开始时可以随机初始化。在训练过程中,因为需要生成不同的boxes,object queries会被迫使变得不同来反映位置信息,所以也可以称为leant positional encoding (注意和encoder中讲的position encoding区分,不是一个东西)。
- 由于在训练过程中,会预测100个框,然后和gt去做匹配,计算loss,这就会反推每个decoder的position embedding默认代表某个位置的框?但是实验代码并没有可视化说明?
-
QA2:Decoder中的QKV分别是什么?
Encoder不用说,就是unit的特征。Decoder中- Q:查询的信息,一般就是position embedding,由于这里会引入先验,最多100个框,所以Q的size为 R 100 × d R^{100 \times d} R100×d
- K:和基础的transformer一样,第一层的attention K和V都是上面的Q。第二层的attention K为Encoder的输入,一般大小为 R ( H × W ) × d R^{(H \times W) \times d} R(H×W)×d
- V:和基础的transformer一样,第一层的attention K和V都是上面的Q。第二层的attention K为Encoder的输入,一般大小为 R ( H × W ) × d R^{(H \times W) \times d} R(H×W)×d
损失函数
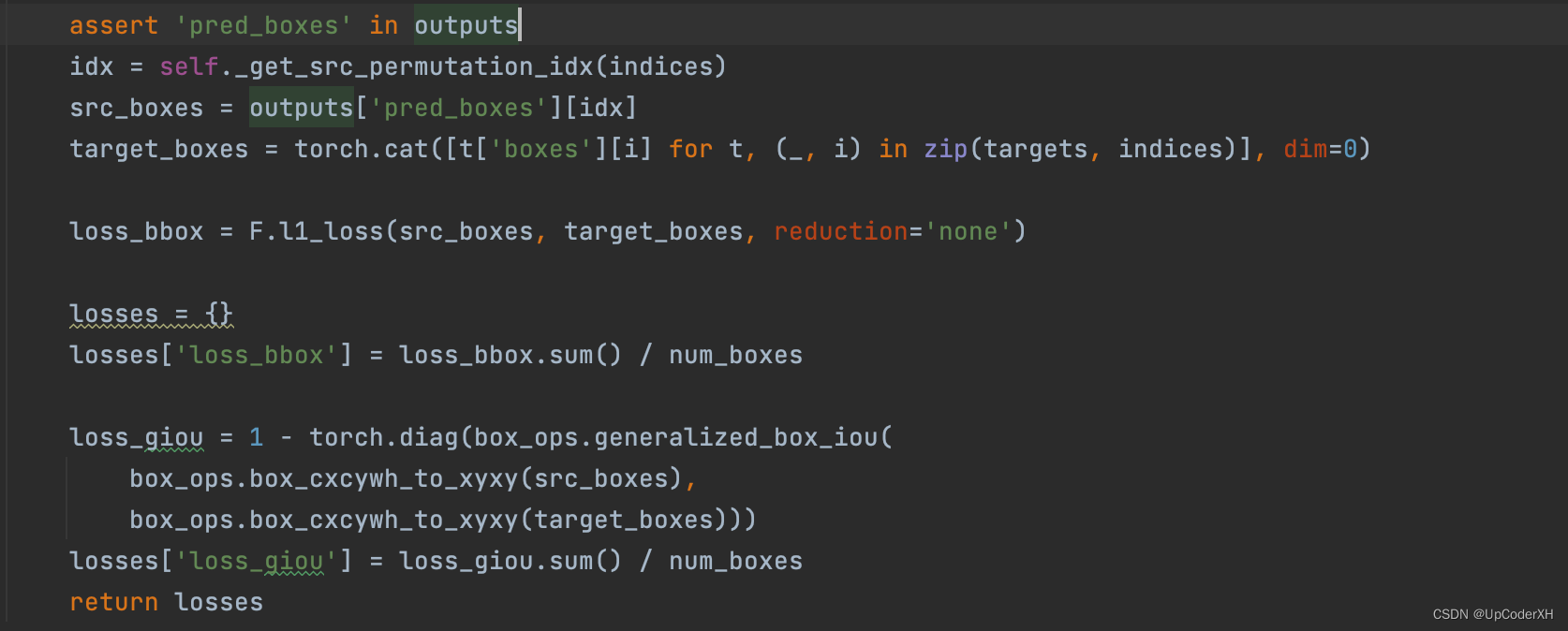
损失函数整体由三部分组成,分类损失+l1loss+GIoU loss。后面两个算是位置优化的损失函数。为什么需要两个?
- L1的劣势:不具备尺度不变性。大物体和小物体之间的loss是不公平的。
- GIoU的劣势:收敛过慢(DIoU中有说)
- GIoU的定义
L g i o u = I o U − C − u i o n C L_{giou} = IoU - \frac{C-uion}{C} Lgiou=IoU−CC−uion - GIoU的特性
- 非负性、三角不等性
- 尺度不变性
- 取值范围[-1, 1],且GIoU <= IoU。
匹配方法
首先将整个问题抽象为匹配问题。给定N个预测的框和M个GT的框。计算min(N, M)个框之间的一个完全匹配。
具体来说,第一步我们根据上述的损失函数定义,计算一个cost矩阵, c o s t i , j cost_{i,j} costi,j代表的含义就是第i个预测框和第j个gt之间的损失函数。我们是希望寻找到一个最佳匹配,使得整体的损失函数是最小的。这里作者采用的是匈牙利算法。详情可以参考wiki。
- QA1:没有被匹配上的预测框是否计算loss。
这部分从代码来看,会计算分类的loss。而不会计算pos的loss。- pos loss
- pos loss
- QA2:匈牙利算法简化版本:
- 给定矩阵C
- 选择每一行中最小的数,并从C中减去,得到C1
- 选择每一列中最小的数,并从C1中减去,得到C2
- 基于C2判断,必须用尽可能少的列或行标记来覆盖矩阵中的所有零。下面的过程是完成这个要求的一种方法:
4.1 首先,尽可能多地分配任务。
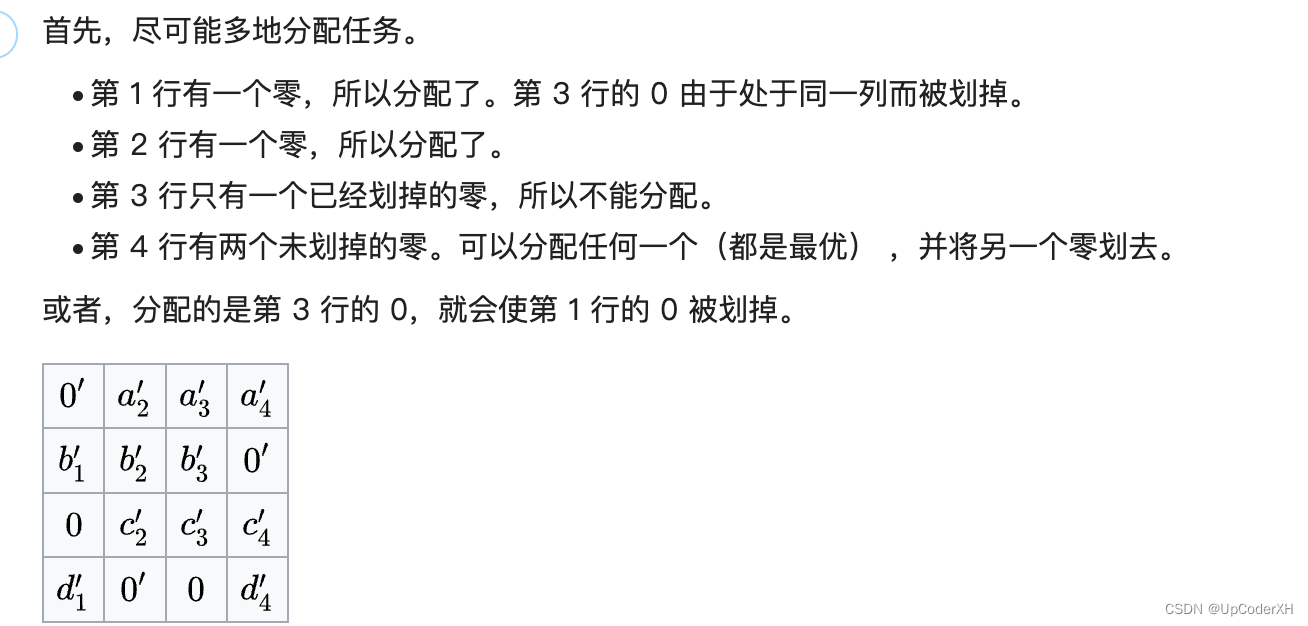
4.2 标记所有未分配的行(第 3 行)。
4.3 标记所有新标记的行中 0所在(且未标记)的对应列(第 1 列)。
4.4 标记所有在新标记的列中有分配的行(第 1 行)。
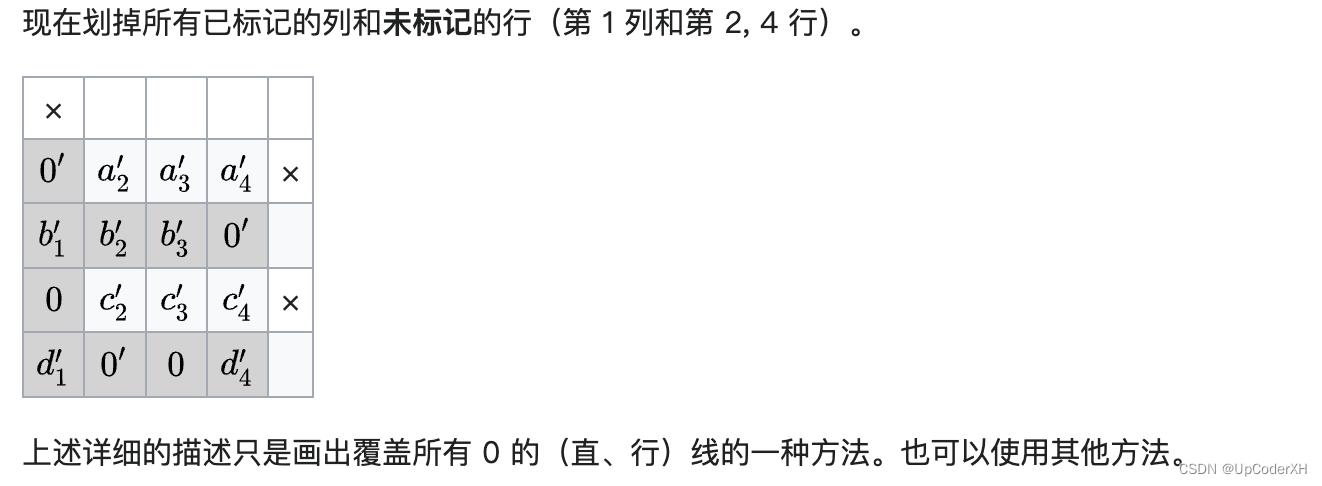
4.5 对所有未分配的行重复上述过程。 - 现在划掉所有已标记的列和未标记的行(第 1 列和第 2, 4 行)。
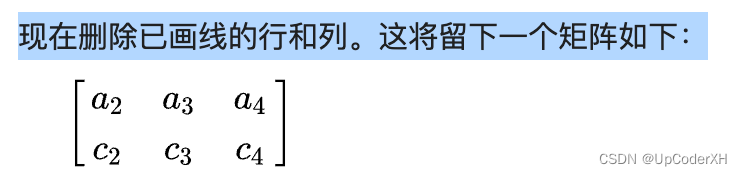
- 现在删除已画线的行和列。这将留下一个矩阵如下:重新开始步骤2。
相关文章:
【Paper Reading】DETR:End-to-End Object Detection with Transformers
背景 Transformer已经在NLP领域大展拳脚,逐步替代了LSTM/GRU等相关的Recurrent Neural Networks,相比于传统的RNN,Transformer主要具有以下几点优势 可解决长时序依赖问题,因为Transformer在计算attention的时候是在全局维度进行…...
【rust/入门】windows安装rust gnu环境(折腾)
说在前面 首先说明,我是rust入门选手,之前都是在wsl写rust,突然想在windows下装下rust。windows版本:windows11 22H2原文换源 心路历程 看到教程我陷入了沉默,(官方推荐) 打开Microsoft C Build Tools我开始不解&…...

java面试---字符串相关内容
字符串 1. 什么是Java中的字符串池(String Pool)?2. String、StringBuilder和StringBuffer之间的区别是什么?3. 如何比较两个字符串的内容是否相等?4、equals和的区别5. String类有哪些常用的方法? 1. 什么…...
MYSQL进阶-事务的基础知识
1.什么是数据库事务? 就是把好几个sql语句打包成一个整体执行,要么全部成功,要么全部失败!!! 事务是一个不可分割的数据库操作序列,也是数据库并发控制的基本单位,其执 行的结果必…...
【C++】C++面向对象,泛型编程总结篇(封装,继承,多态,模板)|(秋招篇)
文章目录 前言如何理解面向对象?如何理解泛型编程?C面向对象的三大特性是什么构造函数有哪几种?讲一下移动构造函数当我们定义一个类 系统会自动帮我们生成哪些函数?标题讲一下类中三类成员(公有私有保护)三…...
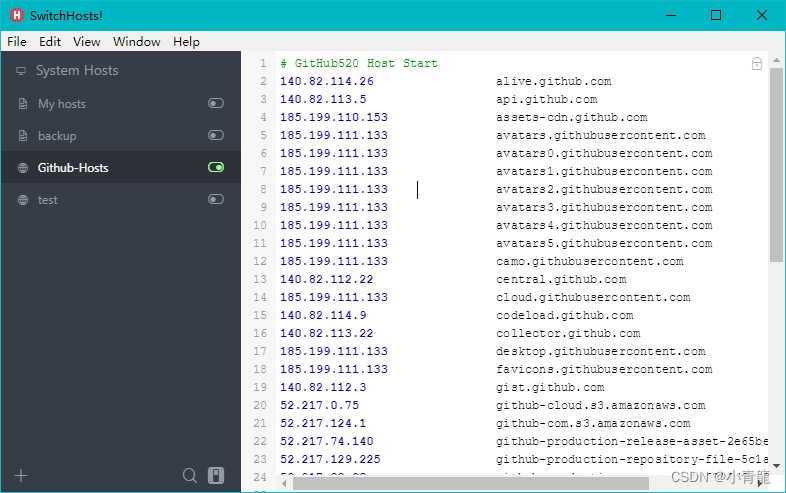
【Github】作为程序员不得不知道的几款Github加速神器
文章目录 背景推荐1:FastGithub推荐2:dev-sidecar推荐3:Watt Toolkit推荐4:篡改猴插件用户脚本1)下载安装-->篡改猴 Tampermonkey 插件2)下载安装-->Github 增强 - 高速下载 用户脚本 推荐5ÿ…...

react18之08自定义hook (简单的axios-get、修改浏览器title、localStorage、获取滚动条位置、img转换为base64)
目录 react18之自定义hook ()01:自定义一个 简单的axios hook 发起get请求useHttp.jsx使用useHttp hook效果 02:自定义一个 修改浏览器title hook03:自定义一个 localStorage(获取、存储、移除) hookuseLocalStorage.jsx使用hook效果 04&…...

对CommonJS、AMD、CMD、ES Module的理解
CommonJS 常用于:服务器端,node,webpack 特点:同步/运行时加载,磁盘读取速度快 语法: // 1. 导出:通过module.exports或exports来暴露模块 module.exports { attr1, attr2 } ex…...
)
JVM之类加载与字节码(二)
3. 编译期处理 什么是语法糖 所谓的 语法糖 ,其实就是指 java 编译器把 *.java 源码编译为 *.class 字节码的过程中,自动生成 和转换的一些代码,主要是为了减轻程序员的负担,算是 java 编译器给我们的一个额外福利(给…...
安装linux操作系统
安装虚拟机的步骤: 安装linux系统 之后开启虚拟机 之后重启,打开虚拟机,登录root账号...

【SpringBoot】知识
.第一个程序HelloWorld 项目创建方式:使用 IDEA 直接创建项目 1、创建一个新项目 2、选择spring initalizr , 可以看到默认就是去官网的快速构建工具那里实现 3、填写项目信息 4、选择初始化的组件(初学勾选 Web 即可) 5、填…...

react ant add/change created_at
1.引入ant的 Table import { Table, Space, Button, message } from antd; 2.获得接口的数据的时候增加上创建时间 const response await axios.get(${Config.BASE_URL}/api/v1/calculation_plans?token${getToken()});if (response.data.message ok) {const data respon…...
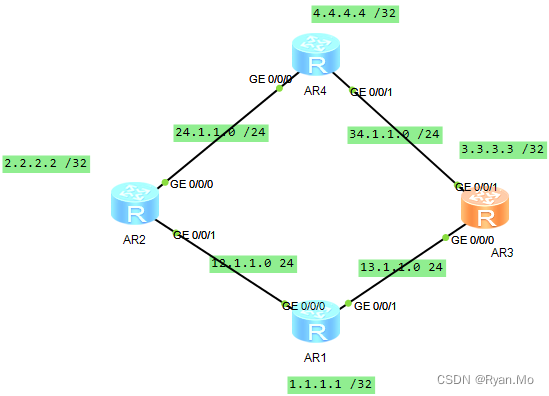
OSPF 动态路由协议 路由传递
影响OSPF路由选择的因素: 1.OSPF路由的开销值:宽带参考值默认为100. COST1000/接口带宽。此时接口 带宽的值可更改,更改后只改变参考数值,带宽仍然为初始值。 注意:更改COST需要 在路由的入方向,数据的出方…...

5.kubeadm安装
文章目录 kubeadm部署环境初始化所有的节点安装Docker所有节点安装kubeadm,kubelet和kubectl初始化方法一,配置文件初始化方法二,命令初始化 网络插件node节点总结 证书过期方法一方法二总结 部署Dashboard kubeadm部署 环境初始化 ###所有…...
【雕爷学编程】Arduino动手做(180)---Seeeduino Lotus开发板2
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的&am…...

6.5 池化层
是什么:池化层跟卷积层类似有个滑动窗口,用来取一个区域内的最大值或者平均值。 作用:卷积神经网络的最后的部分应该要看到整个图像的全局,通过池化(汇聚)操作,逐渐汇聚要取的像素,最终实现学习全局表示的…...
etcd
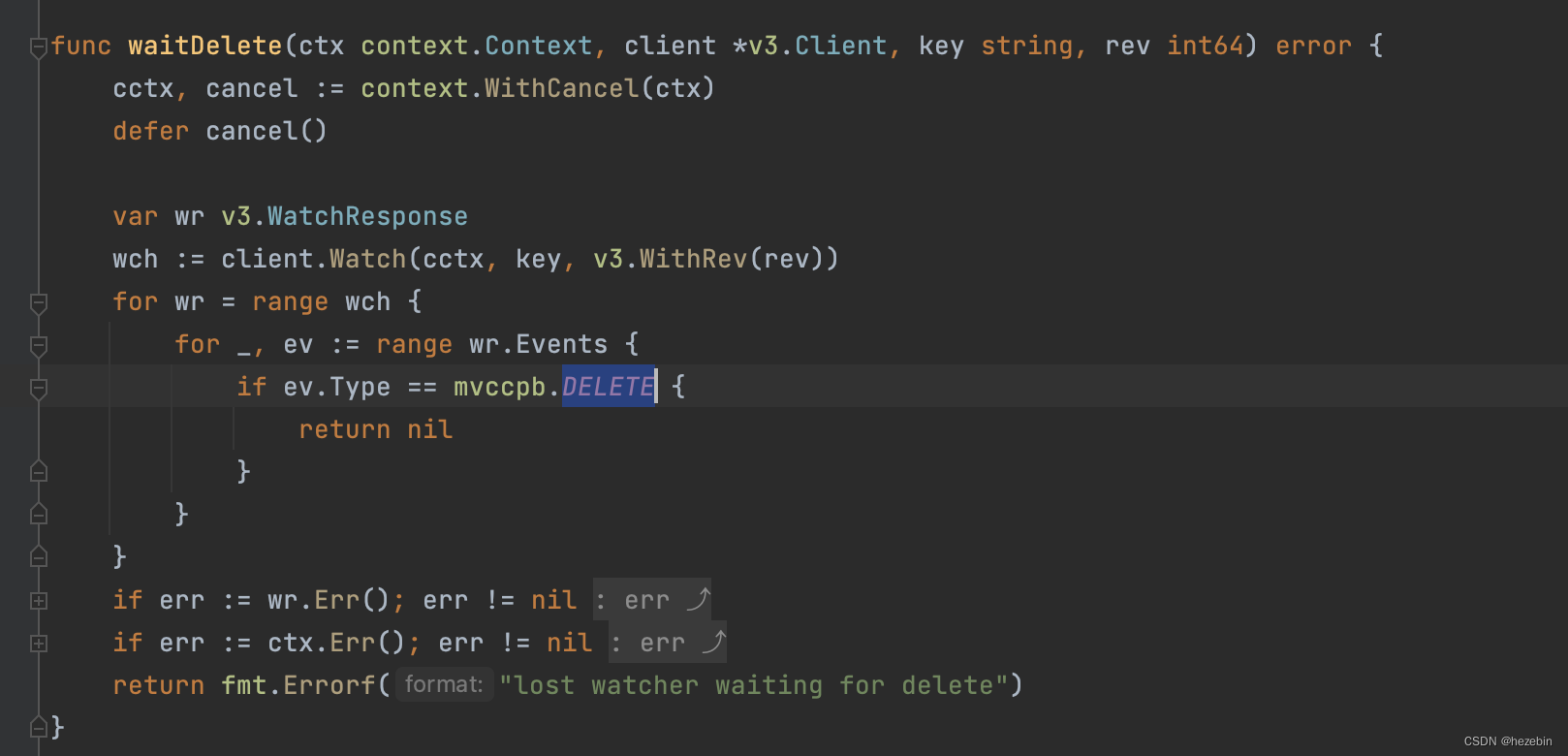
文章目录 etcd单机安装设置键值对watch操作读取键过往版本的值压缩修订版本lease租约(过期机制)授予租约撤销租约keepAlive续约获取租约信息 事务基于etcd实现分布式锁原生实现官方 concurrency 包实现 服务注册与发现Go 操作 Etcd 参考 etcd etcd 是一…...
W5500-EVB-PICO做DNS Client进行域名解析(四)
前言 在上一章节中我们用W5500-EVB-PICO通过dhcp获取ip地址(网关,子网掩码,dns服务器)等信息,给我们的开发板配置网络信息,成功的接入网络中,那么本章将教大家如何让我们的开发板进行DNS域名解析…...
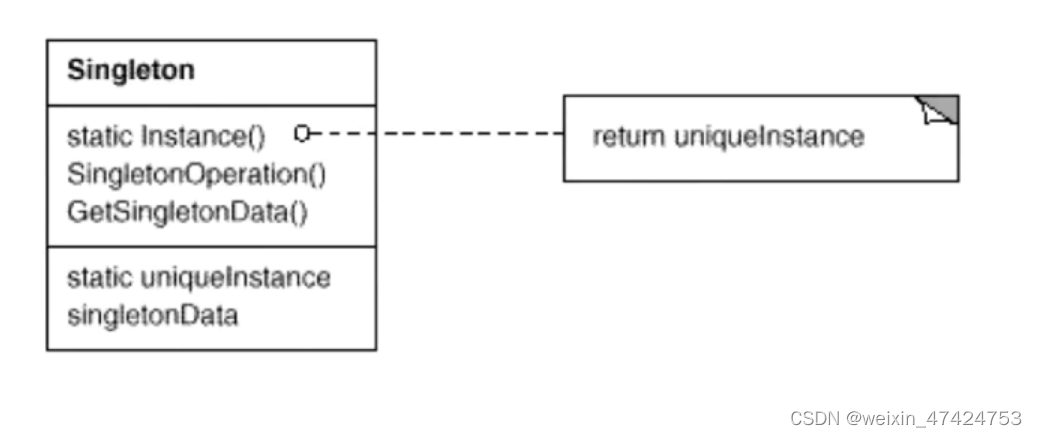
单例模式(C++)
定义 保证一个类仅有一个实例,并提供一个该实例的全局访问点。 应用场景 在软件系统中,经常有这样一些特殊的类,必须保证它们在系统中只存在一个实例,才能确保它们的逻辑正确性、以及良好的效率。如何绕过常规的构造器,提供一种…...
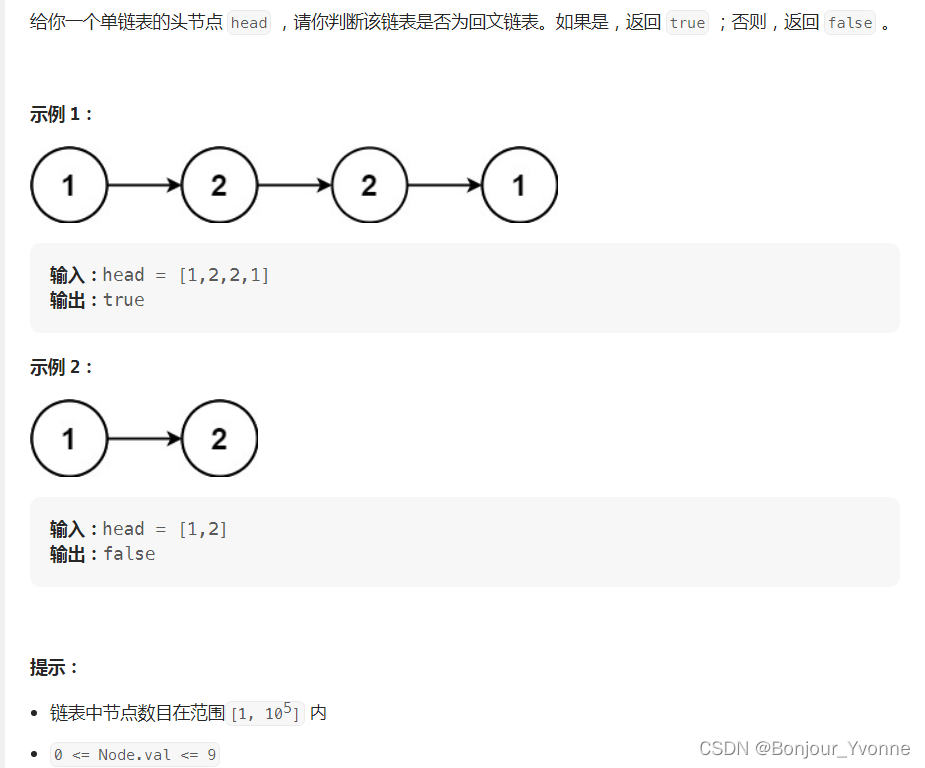
LeetCode 热题 100 JavaScript--234. 回文链表
function ListNode(val, next) {this.val val undefined ? 0 : val;this.next next undefined ? null : next; }var isPalindrome function (head) {if (!head || !head.next) {return true; }// 使用快慢指针法找到链表的中间节点let slow head;let fast head;while …...

VSCode光标主题定制指南:从颜色令牌到扩展开发
1. 项目概述:一个为开发者定制的光标主题集合如果你和我一样,每天有超过8小时的时间都泡在代码编辑器里,那么你一定会对编辑器里那个千篇一律的、闪烁的竖线光标感到审美疲劳。warrenwoodhouse/cursors这个项目,就是来解决这个“小…...

将HermesAgent项目接入Taotoken的详细配置步骤与注意事项
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 将HermesAgent项目接入Taotoken的详细配置步骤与注意事项 本文旨在为开发者提供一份清晰的指南,帮助你将HermesAgent项…...

终极免费城通网盘直连解析工具:告别下载限速的完整指南
终极免费城通网盘直连解析工具:告别下载限速的完整指南 【免费下载链接】ctfileGet 获取城通网盘一次性直连地址 项目地址: https://gitcode.com/gh_mirrors/ct/ctfileGet 还在为城通网盘下载速度慢、等待时间长而烦恼吗?ctfileGet是一款专为城通…...

基于大语言模型的本地语义搜索工具LLocalSearch部署与应用指南
1. 项目概述:一个能“读懂”你电脑的本地搜索工具 如果你和我一样,电脑里塞满了各种文档、邮件、聊天记录和代码片段,那么“找东西”这件事,绝对能排进日常最耗时的任务前三。传统的文件搜索,比如Windows自带的搜索或者…...

Claude API企业准入最后窗口期:2024Q3起强制启用OAuth 2.1+硬件级密钥绑定,现在不升级将无法续签
更多请点击: https://intelliparadigm.com 第一章:Claude API企业准入政策的演进与合规紧迫性 随着Anthropic对Claude模型商用边界的持续收束,企业级API接入正从“技术可用性”转向“治理可验证性”。2024年Q2起,所有新注册企业账…...

Go语言静态站点生成器Zeuxis:极简架构与高性能构建实践
1. 项目概述:一个轻量级、高性能的静态站点生成器最近在折腾个人博客和文档站点,发现市面上的静态站点生成器虽然多,但要么配置复杂、学习曲线陡峭,要么过于臃肿,启动和构建速度慢得让人抓狂。直到我遇到了bnomei/zeux…...

基于HalloWing的交互式徽章:传感器融合与事件驱动编程实践
1. 项目概述:当硬件开发遇上节日创意如果你和我一样,是个喜欢在万圣节搞点“技术流”小把戏的硬件爱好者,那么手头有一块Adafruit的HalloWing开发板,绝对能让你的节日装备脱颖而出。这不仅仅是一个简单的微控制器项目,…...

Bun用Rust重写核心代码,百万行新增代码直接把GitHub干爆了!
Bun 项目刚刚完成了一次惊人的技术跨越。5月14日,Bun 正式宣布其核心运行时已从 Zig 重写为 Rust——这个版本包含 6755 个 commit,二进制文件体积缩小 3-8 MB,性能测试在各个平台上均达到或超越原有水平。Jarred Sumner(Bun 的创…...

树莓派5驱动128x128 LED矩阵:打造复古PICO-8游戏艺术墙
1. 项目概述与核心思路我一直对复古游戏和像素艺术情有独钟,也一直想在家里弄一个既有科技感又能玩的装饰品。最近,我把树莓派5、四块64x64的RGB LED矩阵面板和PICO-8幻想游戏机捣鼓到了一起,成功在墙上挂起了一个128x128像素的“游戏艺术墙”…...

开源大语言模型实战指南:从部署到微调的全流程解析
1. 项目概述:一个为开源大语言模型而生的知识库最近在折腾各种开源大语言模型(LLM)的朋友,估计都遇到过类似的烦恼:模型太多了,从Meta的Llama系列、微软的Phi,到国内的一众优秀模型,…...