D455+VINS-Fusion+surfelmapping 稠密建图(三)
继续,由surfelmapping建立的点云生成octomap八叉树栅格地图

一、安装OctomapServer 建图包
安装插件
sudo apt-get install ros-melodic-octomap-ros
sudo apt-get install ros-melodic-octomap-msgs
sudo apt-get install ros-melodic-octomap-server
sudo apt-get install ros-melodic-octomap-rviz-plugins
编译OctomapServer 建图包
cd ~/catkin_ws/src
git clone https://github.com/OctoMap/octomap_mapping.git
cd ..
catkin_make但是我们通过点云转octomap需要的是pointcloud2类型,所以我们需要先把pointcloud转换为pointcloud2,源码地址如下:源码
cd ~/catkin_ws/src
git clone https://github.com/1332927388/pcl2octomap.git
cd ..
catkin_make将point_cloud_converter.launch的内容改为以下:
<launch><node pkg="point_cloud_converter" name="point_cloud_converter" type="point_cloud_converter_node" ><remap from="points_in" to="/vins_estimator/point_cloud"/><remap from="points2_out" to="/points" /></node>
</launch>修改octomap_server/launch中的octomap_mapping.launch中的point ,将两个文件写在一起,修改后如下:
<launch><node pkg="point_cloud_converter" name="point_cloud_converter" type="point_cloud_converter_node" ><remap from="points_in" to="/vins_estimator/point_cloud"/><remap from="points2_out" to="/points" /></node><node pkg="octomap_server" type="octomap_server_node" name="octomap_server"><param name="resolution" value="0.05" /><!-- fixed map frame (set to 'map' if SLAM or localization running!) --><param name="frame_id" type="string" value="world" /><!-- maximum range to integrate (speedup!) --><param name="sensor_model/max_range" value="5.0" /><!-- data source to integrate (PointCloud2) --><remap from="cloud_in" to="/surfel_fusion/rgb_pointcloud" /></node>
</launch>二、开始运行
启动相机:
roslaunch realsense2_camera stereo-imu.launch开启跟踪节点:
rosrun vins vins_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml开启闭环:
rosrun loop_fusion loop_fusion_node ~/catkin_ws/src/VINS-Fusion/config/euroc/euroc_stereo_imu_config.yaml启动 Surfel Fusion
roslaunch surfel_fusion vins_realsense.launch启动八叉树建图
roslaunch octomap_server octomap_mapping.launch在rviz中添加occupancygrid,并选择/octomap_full话题,即可看到八叉树地图,如下:
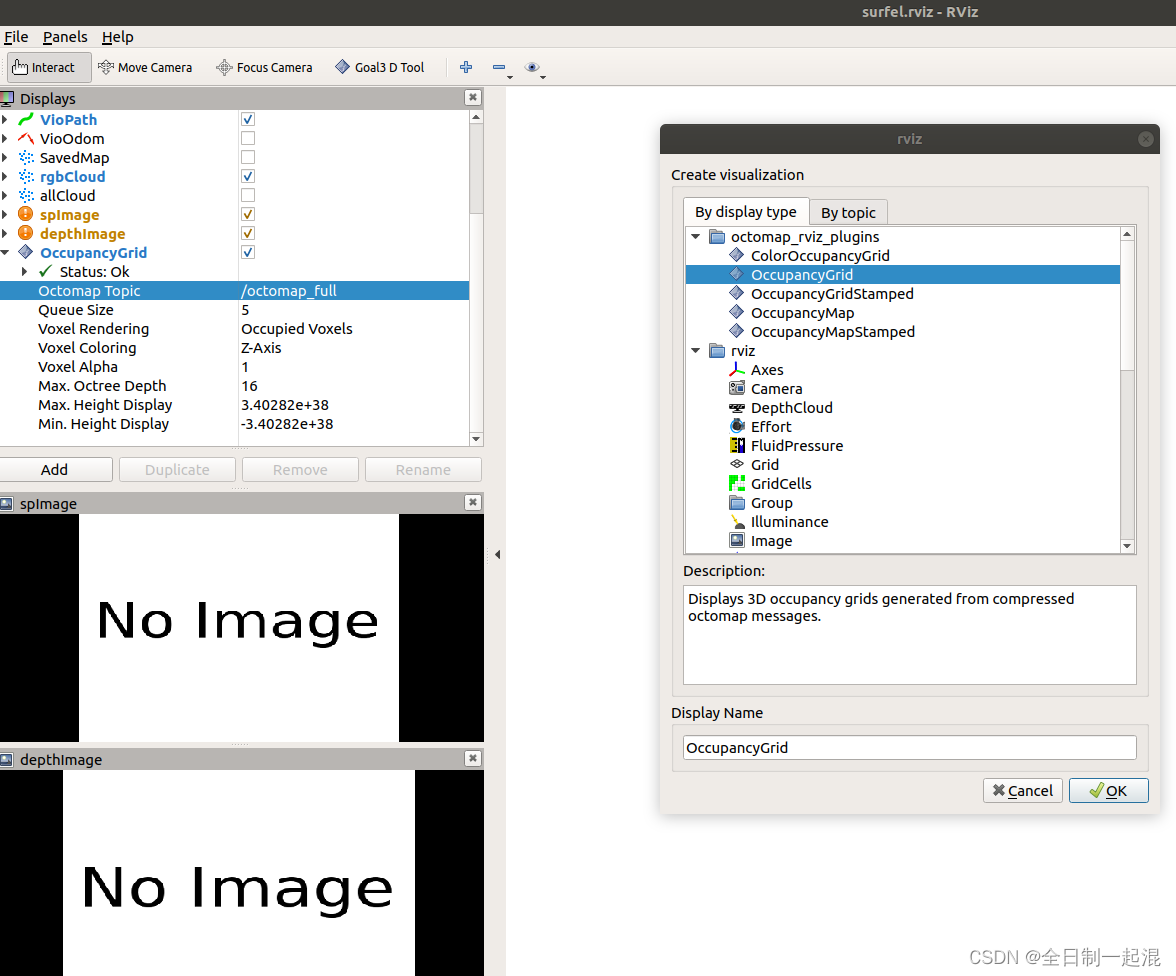
三、最终建图效果
相关文章:
D455+VINS-Fusion+surfelmapping 稠密建图(三)
继续,由surfelmapping建立的点云生成octomap八叉树栅格地图 一、安装OctomapServer 建图包 安装插件 sudo apt-get install ros-melodic-octomap-ros sudo apt-get install ros-melodic-octomap-msgs sudo apt-get install ros-melodic-octomap-server sudo apt-…...
rv1109/1126 rknn 模型部署过程
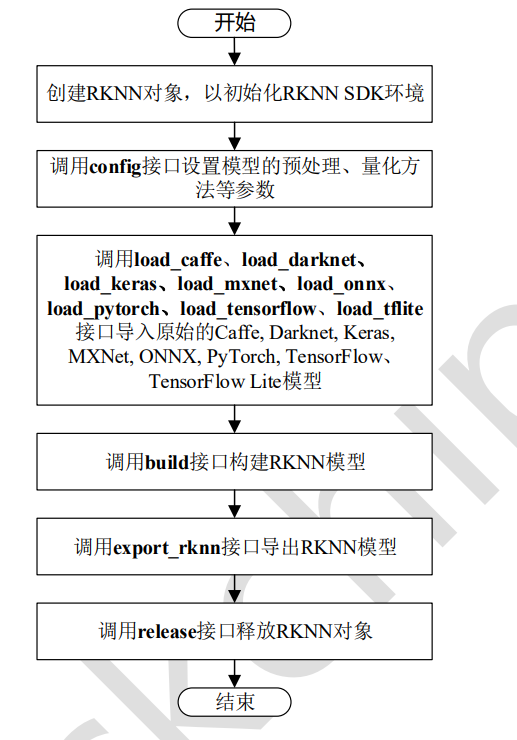
rv1109/1126是瑞芯微出的嵌入式AI芯片,带有npu, 可以用于嵌入式人工智能应用。算法工程师训练出的算法要部署到芯片上,需要经过模型转换和量化,下面记录一下整个过程。 量化环境 模型量化需要安装rk的工具包: rockchip-linux/rk…...

Android平台一对一音视频通话方案对比:WebRTC VS RTMP VS RTSP
一对一音视频通话使用场景 一对一音视频通话都需要稳定、清晰和流畅,以确保良好的用户体验,常用的使用场景如下: 社交应用:社交应用是一种常见的使用场景,用户可以通过音视频通话进行面对面的交流;在线教…...

--binlog-row-event-max-size
--binlog-row-event-max-size MySQL中用于控制rows格式的Binlog,binlog以chunk的方式存储,每个chunk的大小由binlog-row-event-max-size 进行控制; 如果event比较大的时候可以调大这个值;;改值必须是256的倍数&#…...

Jmeter命令行运行实例讲解
1. 简介 使用非 GUI 模式,即命令行模式运行 JMeter 测试脚本能够大大缩减所需要的系统资 本文介绍windows下以命令行模式运行的方法。 1.1. 命令介绍 jmeter -n -t <testplan filename> -l <listener filename> 示例: jmeter -n -t test…...

pl/sql函数如何返回多行数据?在线等......
编辑csm8109022010-01-27 09:59:18 这个问题我以前问过类似的,但一直没得到如意的答案!在oracle 里soctt的用户下的emp表,比如写一个函数,传入的参数为部门编号,然后返回所有该部门人员信息的函数。要用到游标&…...

Ubuntu Find命令详解
一、Find命令简介 Ubuntu的Find命令是一种常用的终端指令,用于在文件系统中查找符合条件的文件和目录。该命令的语法格式如下: find [PATH] [OPTION] [EXPRESSION]其中,PATH表示待查找的目录,OPTION为选项参数,EXPRES…...

ADS Momentum学习笔记
ADS Momentum的简介 ADS Layout界面仿真采用的方法主要是Momentum(矩量法)。 Momentum的特点 Momentum是高级设计系统(ADS)的重要组成部分,它提供了设计现代通信系统的电磁仿真。它可以用来计算一般平面电路的S参数…...
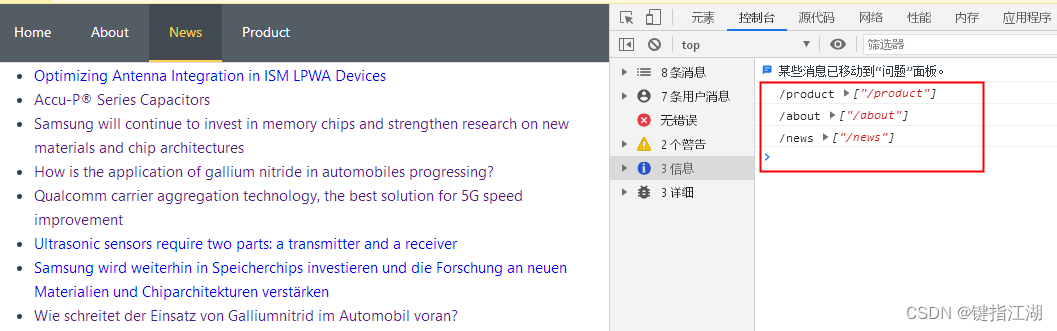
解决Vue3 使用Element-Plus导航刷新active高亮消失
解决Vue3 使用Element-Plus导航刷新后active高亮消失的问题 启用路由模式会在激活导航时以 index 作为 path 进行路由跳转 使用 default-active 来设置加载时的激活项。 接下来打印一下选中项index和index路径, 刷新也是没有任何问题的,active不会消失…...

K8S系列文章之 一键部署K8S环境
部署的原理是基于自动化部署工具 Ansible 实现的,需要提前安装Ansible 并配置下主机节点环境 1. 安装 Ansible 首先ansible基于python2.X 环境,默认centos都已经安装好了python2环境 // 最好更新下库 // yum update yum install -y epel-release yum i…...

Spring Boot、Spring Cloud、Spring Alibaba 版本对照关系及稳定兼容版本
Spring Boot、Spring Cloud、Spring Alibaba 版本对照关系及稳定兼容版本 引言 在 Java 生态系统中,Spring Boot、Spring Cloud 和 Spring Alibaba 是非常流行的框架,它们提供了丰富的功能和优雅的解决方案。然而,随着不断的发展和更新&…...

虫情监测仪介绍—技术原理、功能优势是什么?
KH-CQPest虫情监测仪是做好虫情监测的重要设备,利用虫情监测仪能够对农业大田、智慧温室、林业等场景的害虫分布情况及害虫种类进行监测,协助人们制定合理的防治措施。 1.技术原理: KH-CQPest虫情监测仪采用光学诱虫原理,配合传感…...

HTML5 Canvas和Svg:哪个简单且好用?
HTML5 Canvas 和 SVG 都是基于标准的 HTML5 技术,可用于创建令人惊叹的图形和视觉体验。 首先,让我们花几句话介绍HTML5 Canvas和SVG。 什么是Canvas? Canvas(通过 标签使用)是一个 HTML 元素,用于在用户计算机屏幕…...

ChatGPT在社交媒体聊天和评论分析中的应用如何?
ChatGPT在社交媒体聊天和评论分析中具有广泛的应用前景,可以帮助企业、个人和社会从多个角度更好地理解用户观点、趋势和情感。以下是详细的讨论: **1. 舆情分析与趋势预测:** ChatGPT可以用于分析社交媒体上的评论、帖子和消息,…...
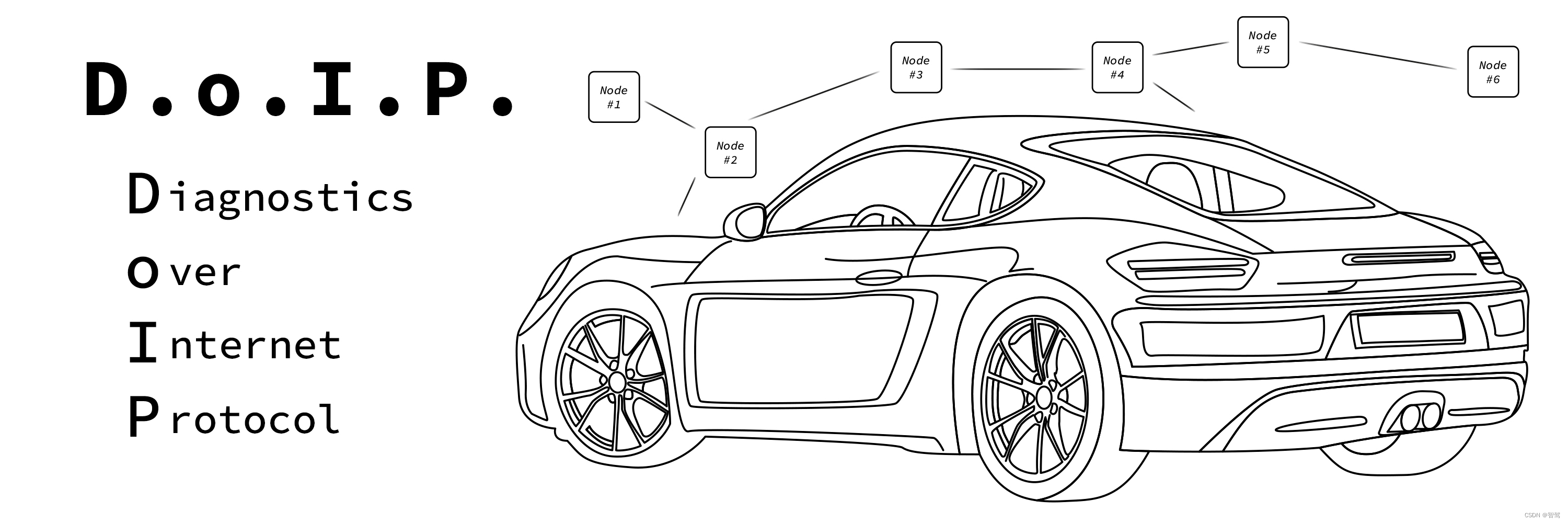
DoIP学习笔记系列:(四)用CAPL脚本读取DID的关键点
文章目录 1. 如何在CAPL中读取DID?1.1 避坑如何新建CAPL工程,在此不再赘述,本章主要分享一下如何在CAPL中调用DoIP接口、diag接口进行DoIP和诊断的测试。 1. 如何在CAPL中读取DID? 通常在实际项目中,会有很多DID,各种版本号、各种观测量,如果手动点,显然很麻烦,如果要…...

chrome插件开发实例06-定制自己的Chrome DevTools调试工具
目录 Chrome DevTools 调试工具 演示 编辑 源码 devtools.html devtools.js panel.html panel.js...
安卓读取,添加,更新,删除联系人,读取短信
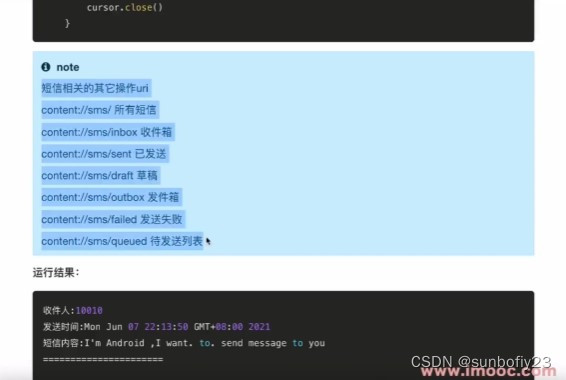
目录 读取联系人 添加联系人 更新联系人 删除联系人 读取短信 读取联系人 安卓可以通过contentResolver来读取联系人表,联系人表的Uri信息是:content://com.android.contacts/data/phones 从而输出联系人信息, 需要相关权限:…...
205. 同构字符串、(哈希表)1002. 查找共用字符)
Practices6|69. x 的平方根、(哈希表)205. 同构字符串、(哈希表)1002. 查找共用字符
69. x 的平方根 1.题目: 给你一个非负整数 x ,计算并返回 x 的 算术平方根 。 由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。 注意:不允许使用任何内置指数函数和算符,例如 pow(x, 0.…...
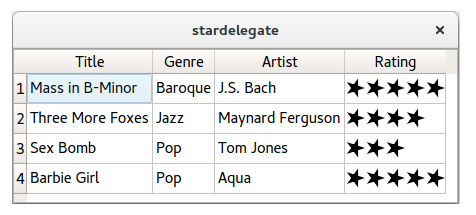
Qt扫盲-Model/View入门
Model/View 编程入门 一、概述二、介绍1. 标准部件2. Model/View 控件3. Model/View控件概述4. 在表格单和 model 之间使用适配器 Adapters 三、 简单的 model / view 应用程序示例1. 一个只读表2. 使用role扩展只读示例3. 表格单元中的时钟4. 为列和行设置标题5. 最小编辑示例…...
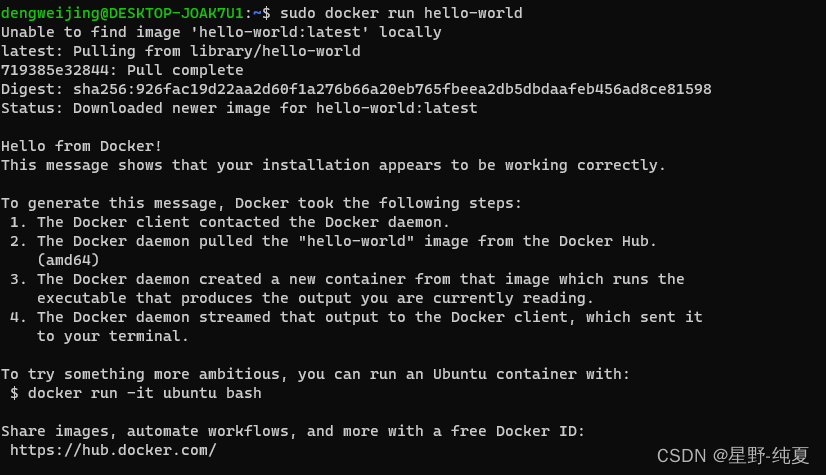
关于win11 debian wsl 子系统安装启动docker一直starting,无法启动
首先我先说明,我的步骤都是按照官网步骤来的 通过官网的操作步骤 通过测试命令 sudo docker run hello-world得到下面的命令,我们通过启动命令 sudo service docker start 执行结果如下图 也就是说无法启动,一直显示在启动中 遇到这种情况…...

3个关键功能解析:USBToolBox如何简化macOS与Windows的USB端口映射难题
3个关键功能解析:USBToolBox如何简化macOS与Windows的USB端口映射难题 【免费下载链接】tool the USBToolBox tool 项目地址: https://gitcode.com/gh_mirrors/too/tool 在Hackintosh和跨平台开发领域,USB端口映射一直是个令人头疼的技术难题。US…...

30岁裸辞后,我用两个月拿下AI应用认证,现在OFFER选择困难症犯了
30岁裸辞那天,我最怕的不是没收入,而是突然发现:过去积累的经验,正在被AI重新定价。以前会写方案、做表格、跟项目,算是职场硬通货;到了2026年,招聘JD里开始频繁出现AI工具应用、智能工作流、Pr…...

HFSS仿真结果怎么看?一文读懂S参数与电场图,让你的T型波导分析不再迷茫
HFSS仿真结果深度解析:从S参数到电场图的工程实践指南面对HFSS仿真生成的复杂数据图表,许多工程师常陷入"看得见数据却读不懂含义"的困境。本文将带您穿透数据表象,掌握T型波导性能分析的核心方法论。1. S参数:波导性能…...
)
放弃编码器!纯靠MPU6050和PID算法,手把手教你用TT马达实现平衡小车稳定控制(STM32F103C8T6实战)
纯MPU6050STM32F103的TT马达平衡车实战:无编码器PID控制全解析当大多数平衡小车方案都在强调编码器对速度反馈的不可或缺性时,我们决定挑战一个更极简的配置:仅用5美元的TT马达、9轴的MPU6050和STM32F103C8T6最小系统板,完全舍弃编…...

为什么软件开发偏爱 Linux?深度剖析 Linux 相较于 Windows 的核心优势
引言 在软件开发的世界里,一个有趣的现象是:无论是大型互联网公司的服务器集群,还是资深程序员的个人开发机,Linux 操作系统的身影无处不在。与之形成鲜明对比的是,尽管 Windows 在个人消费市场占据绝对主导地位&…...

0.2毫秒快速启动的操作系统
在工业控制以及航空航天等核心场景,极速启动就是高可靠系统的生命线。0.2毫秒超快启动搭配硬件看门狗,让设备在掉电重启、异常恢复时瞬时归位,关键任务永不延误! https://www.bilibili.com/video/BV11mLY6VERt/?spm_id_from333.1…...

taotoken如何帮助ubuntu开发者应对大模型api的频繁更新与版本迭代
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken如何帮助Ubuntu开发者应对大模型API的频繁更新与版本迭代 对于在Ubuntu环境下进行开发的工程师而言,大模型API…...
)
别再死磕USB HID了!用ESP32的Arduino框架手把手教你实现蓝牙鼠标键盘(附完整代码)
ESP32蓝牙HID实战:零基础打造自定义键盘鼠标 手里那块吃灰的ESP32开发板终于能派上用场了!上周我用它做了个无线演示控制器,在会议室里走着就能翻PPT,同事们都问是怎么实现的。其实秘诀就在于ESP32的蓝牙HID功能——不需要任何USB…...

终极Node.js Mock工具:Mockery入门到精通实战教程
终极Node.js Mock工具:Mockery入门到精通实战教程 【免费下载链接】mockery Simplifying the use of mocks with Node.js 项目地址: https://gitcode.com/gh_mirrors/mock/mockery Mockery是Node.js生态中简化Mock使用的终极工具,它为开发者提供了…...

Codex使用API Key授权无法使用插件?
小伙伴们,大家好,我是小溪,见字如面。对于没有ChatGPT账号的小伙伴来说,虽然可以通过API Key授权的方式使用Codex桌面端,但是会有一些限制。比如无法使用插件功能,无法使用Codex移动端进行远程控制等。为了…...