[国家集训队] Tree II 题解报告
[国家集训队] Tree II
一道·真·板子·题
就是练习LCT懒标记的题目
除了翻转标记以外还要维护乘法标记和加法标记
注意加法标记和乘法标记的维护!!!
加法标记
因为splay的区间大小不是固定的,所以我们要维护size,并且子树的sum要加上size乘上标记
其他的就只用直接加上即可
void pushadd(ll x,ll c){t[x].sum=(t[x].sum+t[x].sz*c%P)%P;t[x].val=(t[x].val+c)%P;t[x].add=(t[x].add+c)%P;
}
乘法标记
由于乘法的优先级要大于加法
所以我们的加法标记也要乘上乘法标记值
void pushmul(ll x,ll c){t[x].sum=t[x].sum*c%P;t[x].val=t[x].val*c%P;t[x].mul=t[x].mul*c%P;t[x].add=t[x].add*c%P;
}
注意:int过不了!!!
CODE
#include<bits/stdc++.h>
#define ll long long
using namespace std;
const ll N=1e5+2,P=51061;
ll n,q,s[N];
struct node{ll ch[2],p,sum,tag,sz,val,mul,add;}t[N];
void pushtag(ll x){swap(t[x].ch[0],t[x].ch[1]);t[x].tag^=1;
}
void pushmul(ll x,ll c){t[x].sum=t[x].sum*c%P;t[x].val=t[x].val*c%P;t[x].mul=t[x].mul*c%P;t[x].add=t[x].add*c%P;
}
void pushadd(ll x,ll c){t[x].sum=(t[x].sum+t[x].sz*c%P)%P;t[x].val=(t[x].val+c)%P;t[x].add=(t[x].add+c)%P;
}
void pushup(ll x){t[x].sum=(t[t[x].ch[0]].sum+t[x].val+t[t[x].ch[1]].sum)%P;t[x].sz=t[t[x].ch[0]].sz+t[t[x].ch[1]].sz+1;
}void pushdown(ll x){if(t[x].mul!=1){pushmul(t[x].ch[0],t[x].mul);pushmul(t[x].ch[1],t[x].mul);t[x].mul=1;}if(t[x].add){pushadd(t[x].ch[0],t[x].add);pushadd(t[x].ch[1],t[x].add);t[x].add=0;}if(t[x].tag){pushtag(t[x].ch[0]);pushtag(t[x].ch[1]);t[x].tag=0;}
}
bool isrt(ll x){//判断节点x是否是当前实树的根return t[t[x].p].ch[0]!=x&&t[t[x].p].ch[1]!=x;
}
void rotate(ll x){//x上旋 ll y=t[x].p,z=t[y].p;ll k=(t[y].ch[1]==x);//x原来的位置 if(!isrt(y)) t[z].ch[(t[z].ch[1]==y)]=x;//x代替y位置 t[x].p=z;t[y].ch[k]=t[x].ch[k^1];t[t[x].ch[k^1]].p=y;t[x].ch[k^1]=y;t[y].p=x;pushup(y);pushup(x);
}
void splay(ll x){//x上旋到根 ll top=0,r=x;s[++top]=r;while(!isrt(r)){s[++top]=r=t[r].p;}while(top) pushdown(s[top--]);while(!isrt(x)){ll y=t[x].p,z=t[y].p;if(!isrt(y)){//y不为目标位置 if((t[y].ch[1]==x)^(t[z].ch[1]==y)) rotate(x);//不在同一直线上 else rotate(y);//在同一直线上 }rotate(x);}
}
void access(ll x){// 把根节点到x的路径上的边全部变为实边,同时将x变成splay的根节点ll z=x;for(ll y=0;x;y=x,x=t[x].p){splay(x);t[x].ch[1]=y;//右子树 pushup(x);}splay(z);
}
void makert(ll x){// 将x变成原树的根节点access(x);//打通一条从根到x的路径 然后将x旋到根 //首先 打通一条从根到x的路径 后 x 是 d最大的点 //因此 此时,x必然是Splay中中序遍历最后得到的点 pushtag(x);//翻转Splay , x成为 中序遍历 第一个点->即原树根节点
}
ll findrt(ll x) {// 找到x所在原树的根节点, 再将原树的根节点旋转到splay的根节点access(x);//x与原树根在同一splay内//由于每个Splay中维护的节点按中序遍历得到的顺序在原树中深度依次增加1//所以根节点必然是Splay中序遍历顺序为1的节点while(t[x].ch[0]){pushdown(x);x=t[x].ch[0];}//路径深度最小 splay(x);return x;
}
void split(ll x,ll y){ // 给x和y之间的路径建1个splay,其根节点是ymakert(x);access(y);
}
void link(ll x,ll y){//如果x和y不连通,加1条x和y之间的边makert(x);// 将x作为它所在树的根if(findrt(y)!=x){//不连通 t[x].p=y;//更新x的父亲为y}
}
bool back(ll x,ll y){//y是否是x的后继 return t[x].ch[1]==y&&!t[y].ch[0];
}
void cut(ll x,ll y){// 如果x和y之间存在边,则删除该边split(x,y);//只剩下x->y,x是y的做儿子 if(t[x].ch[1]||t[x].p!=y||t[y].ch[1])return ;t[t[y].ch[0]].p=0;t[y].ch[0]=0;
}
int main(){scanf("%lld%lld",&n,&q);for(ll i=1;i<=n;i++){t[i].val=t[i].sz=t[i].mul=1;}for(ll i=1,x,y;i<n;i++){scanf("%lld%lld",&x,&y);link(x,y);}for(ll i=1;i<=q;i++){char op[10];ll x,y,k;scanf("%s",op);if(op[0]=='+'){scanf("%lld%lld%lld",&x,&y,&k);split(x,y),pushadd(y,k);}else if(op[0]=='-'){scanf("%lld%lld",&x,&y);cut(x,y);scanf("%lld%lld",&x,&y);link(x,y);}else if(op[0]=='*'){scanf("%lld%lld%lld",&x,&y,&k);split(x,y),pushmul(y,k);}else{scanf("%lld%lld",&x,&y);split(x,y);printf("%lld\n",t[y].sum);}}return 0;
}
完结撒花❀
★,°:.☆( ̄▽ ̄)/$:.°★ 。
相关文章:

[国家集训队] Tree II 题解报告
[国家集训队] Tree II 一道真板子题 就是练习LCT懒标记的题目 除了翻转标记以外还要维护乘法标记和加法标记 注意加法标记和乘法标记的维护!!! 加法标记 因为splay的区间大小不是固定的,所以我们要维护size,并且…...

【redis】docker搭建redis集群
docker搭建redis集群,超级简单方便。 # 1. 拉取redis. 目前我拉取最新的是7.0.12 docker pull redis # 2. 下载配置文件 wget https://raw.githubusercontent.com/redis/redis/7.0/redis.conf # 3. 移到对应目录 mkdir -p /opt/docker/redis mv redis.conf /opt/d…...

前端个人年度工作述职报告(二十篇)
前端个人年度工作述职报告篇1 尊敬的各位领导、各位同仁: 大家好!按照20__年度我公司就职人员工作评估的安排和要求,我认真剖析、总结了自己的工作情况,现将本人工作开展情况向各位领导、同仁做以汇报,有不妥之处,希…...

TypeScript 编译配置
TypeScript的编译配置: 对单独一个ts文件进行监听编译 可使用tsc demo.ts -w 如果想对所有ts文件进行监听编译,监听到变化就自己编译,可以直接创建一个tsconfig.json文件。内容空着也OK:{},执行 tsc 或 tsc -w 如果有…...
使用DMA传输实现单片机高效串口转发——以STM32系列为例
使用DMA传输实现单片机高效串口转发——以STM32系列为例 DateAuthorVersionNote2023.08.06Dog TaoV1.01. 完成了文档的撰写。 文章目录 使用DMA传输实现单片机高效串口转发——以STM32系列为例应用场景实现流程源码示例串口与中断配置DMA外设配置DMA发送数据函数串口中断服务函…...

一文了解 Android Auto 车载开发~
作者:牛蛙点点申请出战 背景 我的的产品作为一个海外音乐播放器,在车载场景听歌是一个很普遍的需求。在用户反馈中,也有很多用户提到希望能在车上播放音乐。同时车载音乐也可以作为提升用户消费时长一个抓手。 出海产品,主要服务…...
Pixel4 安卓源码及内核修改编译教程 | 基于Android12 AOSP
之前整理了 Pixel4上的源码过程,下载的话大家可以去镜像网站下载,可以节约很多时间。 实验设备:Ubuntu18.04 32G2T Pixel4 文章目录 一、安卓源码下载1.准备下载环境(1)安装Python 3.9(2)安装g…...

如何做好Code Review
本文主要从我们为什么需要CR?CR面临哪些挑战?CR的最佳实践几个方面分析,希望可以给读者一些参考。 为什么需要CR? 代码质量 定性来看,大家都认可Code Review(后文简称CR)能显著改善代码质量&…...

Unity技术框架集合、Unity技术栈汇总
引擎技术尝试 [Animancer-Pro] (https://assetstore.unity.com/packages/tools/animation/animancer-pro-116514) (基于Playable的简单强大的动画解决方案)[ProBuilder/UModeler] (https://assetstore.unity.com/packages/tools/modeling/umodeler-80868) (快速关卡原型构建…...

安卓SDK开发的一些疑问
目前,公司需要开发一套iOS和安卓的sdk,主要包含蓝牙管理、网络请求、倒计时等方案执行、蓝牙数据交互等功能。之前没有过开发安卓sdk的经历,写个笔记用以记录。 现在iOS sdk已经写了一部分,安卓开发我也习惯从iOS的角度类比来开发…...
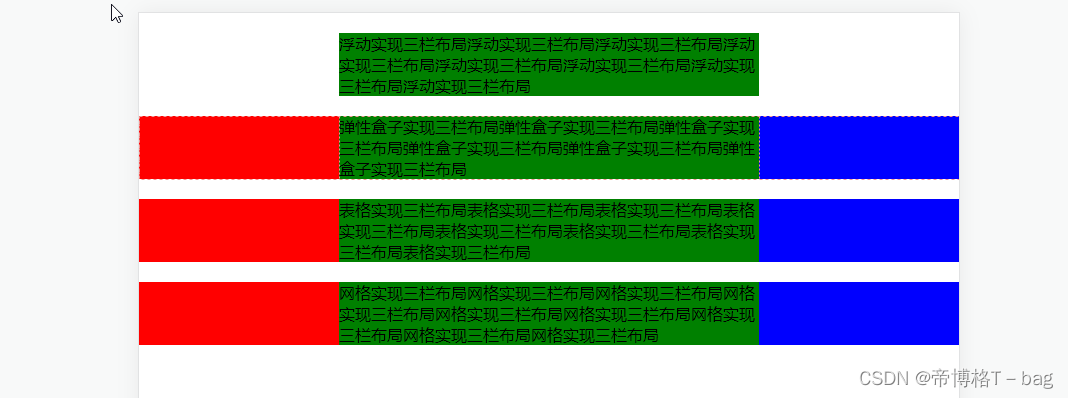
【基础类】—三栏页面布局的方案和优缺点
一、假设高度已知,中间宽度自适应,三栏(列)布局的方案有哪些? float浮动、absolute绝对定位、flex弹性盒子、table表格布局、grid网格布局 浮动 float <style>* {margin: 0;padding: 0;}.container {width: 1…...

OPENCV C++(四)形态学操作+连通域统计
形态学操作 先得到一个卷积核 Mat kernel getStructuringElement(MORPH_RECT,Size(5,5)); 第一个是形状 第二个是卷积核大小 依次为腐蚀 膨胀 开运算 闭运算 Mat erodemat,dilatemat,openmat,closemat;morphologyEx(result1, erodemat, MORPH_ERODE, kernel);morphologyEx…...
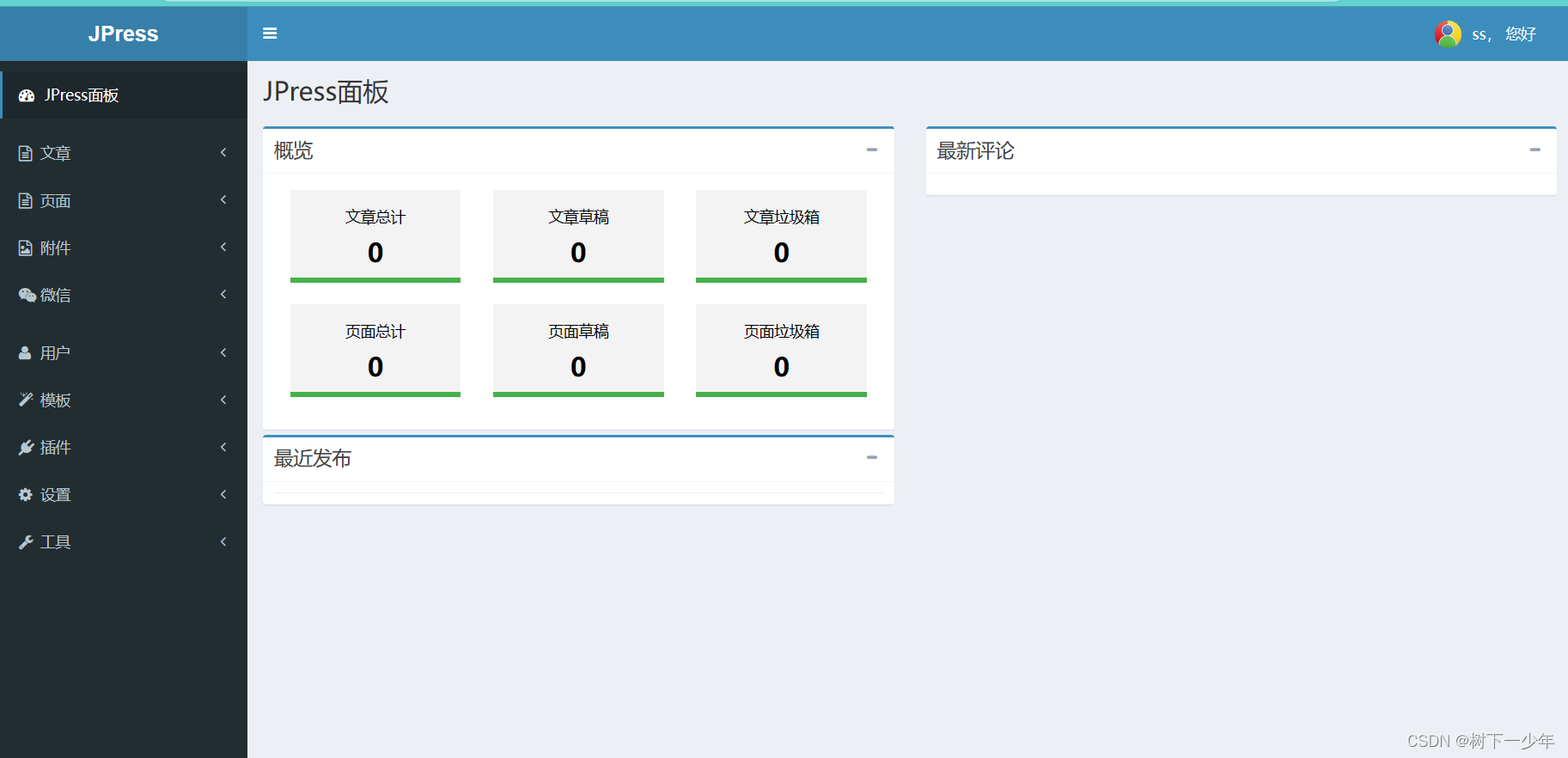
tomcat上部署jpress
一.确保有jdk,tomcat和mysql环境 二.新建jpress数据库,新建jpress用户并赋予所有权限 三.将jpress的war上传到tomcat/apache-tomcat-8.5.70/webapps,具体根据你的实际tomcat安装路径为准,上传完成后他会自己解包 四.到浏览器完…...

篇十:外观模式:简化复杂系统
篇十:“外观模式:简化复杂系统” 开始本篇文章之前先推荐一个好用的学习工具,AIRIght,借助于AI助手工具,学习事半功倍。欢迎访问:http://airight.fun/。 另外有2本不错的关于设计模式的资料,分…...

linux gcc __attribute__
__attribute__ 1. 函数属性1.1 __attribute__((noreturn))1.2 __attribute__((format))1.3 __attribute__((const)) 2. 变量属性2.1. __attribute__((aligned))2.2. __attribute__((packed)) 3. 类型属性 __attribute__ 是 GCC 编译器提供的一种特殊语法,它可以用于…...
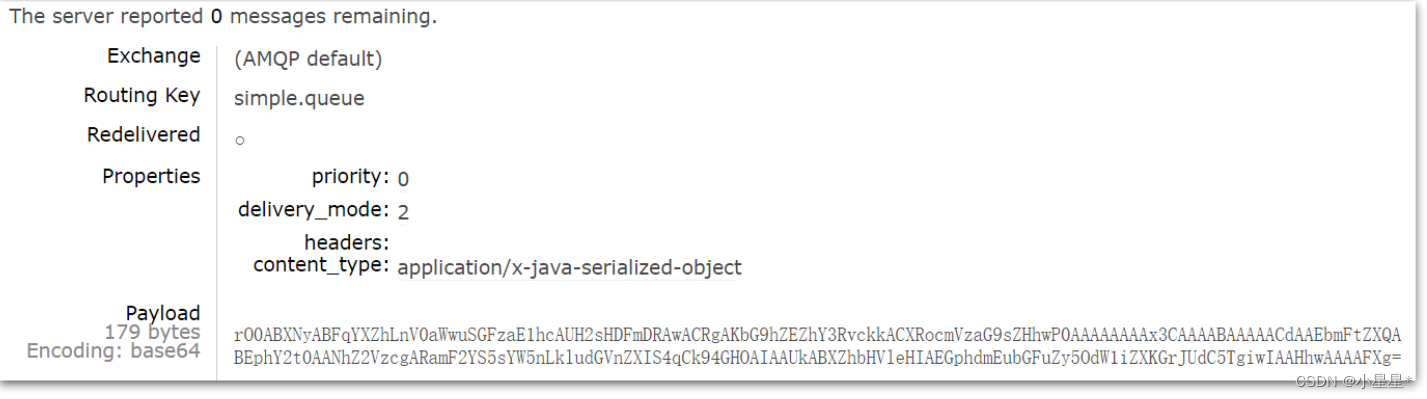
【SpringCloud】RabbitMQ基础
1.初识MQ 1.1.同步和异步通讯 微服务间通讯有同步和异步两种方式: 同步通讯:就像打电话,需要实时响应。 异步通讯:就像发邮件,不需要马上回复。 两种方式各有优劣,打电话可以立即得到响应,…...
css, resize 拖拉宽度
效果如下: 可直接复制预览查看属性值: 关键样式属性: resize: horizontal; overflow-x: auto; <!DOCTYPE html> <html lang"en"> <head><meta charset"UTF-8"><meta name"viewport" content…...
Python识别抖音Tiktok、巨量引擎滑块验证码识别
由于最近比较忙,所以本周搞了一个相对简单的验证码,就是抖音Tiktok的滑块验证码,这也是接到客户的一个需求。这种验证码通常在电脑端登录抖音、巨量引擎的的时候出现。 首先看一下最终的效果: 验证码识别过程 1、利用爬虫采集图…...

EvilBox One靶场笔记
EvilBox: One靶场笔记 信息收集 先fscan找主机192.168.1.102 namp扫端口 开放80,22端口 然后扫目录 └─$ gobuster dir -r -u http://192.168.1.102/ -w /usr/share/wordlists/dirbuster/directory-list-2.3-medium.txt -x php,txt,bak,html在扫secret目录,找…...

shell脚本中的export无效
写了一段shell脚本: #!/bin/bash source Tools/simulation/gazebo-classic/setup_gazebo.bash $(pwd) $(pwd)/build/px4_sitl_default export ROS_PACKAGE_PATH$ROS_PACKAGE_PATH:$(pwd) export ROS_PACKAGE_PATH$ROS_PACKAGE_PATH:$(pwd)/Tools/simulation/gazebo…...

【DeepSeek-R1代码相似度引擎解密】:3层语义比对机制、Token归一化偏差修正与Jaccard阈值黄金分割点
更多请点击: https://kaifayun.com 第一章:DeepSeek代码重复检测 DeepSeek-R1 模型在训练过程中引入了严格的代码去重机制,其核心目标是消除训练语料中语义等价或高度相似的代码片段,从而提升模型对真实编程模式的学习能力与泛化…...

物理引导的机器学习工作流:气候建模的融合创新与实践
1. 项目概述:当气候建模遇见机器学习如果你像我一样,在气候模拟这个领域摸爬滚打超过十年,就会深刻体会到一种“甜蜜的负担”:我们构建的地球系统模型(ESM)越来越精细,物理过程越来越复杂&#…...
)
UOS系统下WPS卸载不干净?手把手教你用命令行精准清理(附dpkg/apt组合拳)
UOS系统下WPS卸载不干净?手把手教你用命令行精准清理 在UOS系统日常使用中,WPS Office作为常用办公软件,有时因版本更新或功能调整需要彻底卸载。但不少用户发现,通过图形界面或简单命令卸载后,系统中仍残留配置文件、…...

除了排错,你可能不知道OPC Expert v8.1还能做这些:数据归档、计算与冗余实战
解锁OPC Expert v8.1的隐藏潜力:数据归档、实时计算与冗余架构实战指南在工业自动化领域,OPC Expert常被视为故障排查的"急救箱",但它的能力远不止于此。当大多数工程师还在用它解决DCOM配置问题时,少数先行者已经用它重…...

机器学习与SHAP在教育公平研究中的应用:精准定位学业困境根源
1. 项目概述:当机器学习遇见教育公平,我们如何精准定位学业困境的根源?在拉丁美洲的教育研究领域,一个长期困扰政策制定者和研究者的核心问题是:究竟是什么因素,在复杂的社会经济背景下,系统性地…...

学术写作创新突破!2026全流程AI论文工具精选指南
2026 年 AI 论文写作工具已进入全流程闭环 学术合规时代,千笔 AI(综合评分 99 分)中文学术场景标杆;Grammarly Academic与Elicit为英文论文写作首选;按需求匹配度 - 数据可信度 - 成本承受力三维模型选型,…...

配置OpenClaw Agent使用Taotoken作为后端模型提供商
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 配置OpenClaw Agent使用Taotoken作为后端模型提供商 基础教程类,指导希望使用OpenClaw等Agent工具的开发者,…...

腾讯 Marvis 初级使用教程——从安装到上手
腾讯最新系统级AI助手Marvis(2026年5月20日发布),官网 https://marvis.qq.com,主打“一句话操作电脑”、跨端协同、GUI Agent执行。虽然是个【小龙虾】,但上手其实不难。这篇就简单写写 Marvis 的安装和基础使用&#…...

阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月
阿波罗登月,不可能:读心术与影子叙事 ——不是向全世界展示登月,而是向全世界注射登月 Jianbing Zhu 1^{1}1 1^{1}1 ECT-OS-JiuHuaShan 文明实验室 ORCID: 0009-0006-8591-1891 DOI: 10.5281/zenodo.20373157 Email: ect-os-jiuhuashanzoho…...

基于ESP8266与MQTT的家庭水压自动控制系统设计与实现
1. 项目概述与核心需求解析家里水压不稳、供水时断时续,这大概是很多朋友都遇到过的烦心事。我所在的城市供水情况就很不理想,为了解决这个问题,我不得不自己动手,搭建了一套基于ESP8266微控制器的家庭水压增压与储水自动控制系统…...