基于YOLOv7开发构建MSTAR雷达影像目标检测系统
MSTAR(Moving and Stationary Target Acquisition and Recognition)数据集是一个基于合成孔径雷达(Synthetic Aperture Radar,SAR)图像的目标检测和识别数据集。它是针对目标检测、机器学习和模式识别算法的研究和评估而设计的。
MSTAR数据集由美国海军研究实验室(Naval Research Laboratory,NRL)创建,该数据集包含了多种类型和方位的车辆和目标的高分辨率合成孔径雷达图像。它提供了复杂的场景和多种目标类型,包括各种车辆和地面目标,如坦克、卡车、自行车等。
MSTAR数据集的特点如下:
-
分辨率高:MSTAR数据集的SAR图像具有高分辨率,能够提供细节丰富的目标信息,有助于进行精确的目标检测和识别。
-
方位变化:该数据集提供了目标在不同方位角下的合成孔径雷达图像,包括前视、靠近侧视、背视等多种视角,用于研究方位变化对目标识别的影响。
-
多样性目标:MSTAR数据集中包含了多种类型的目标,涵盖了各种车辆和地面目标,使得研究和评估的算法可以具有更好的泛化性能。
MSTAR数据集对于合成孔径雷达图像的目标检测和识别算法的研究和评估提供了有力的工具。它可以用于训练和测试基于机器学习和深度学习的目标检测模型,提高合成孔径雷达图像分析的准确性和鲁棒性。
在前面的博文中我已经基于MSTAR的数据集开发构建了目标检测系统,感兴趣的话可以自行移步阅读即可:
《基于yolov5n的轻量级MSTAR遥感影像目标检测系统设计开发实战》
之前是使用的yolov5模型去开发实现的,且使用的是最为轻量级的模型,这里考虑基于yolov7来开发构建MSTAR雷达影像目标检测识别系统,简单看下实例效果图:

接下来看下数据集情况:


共有2.4w+的数据。
本文使用到的YOLOv7模型配置文件如下所示:
# parameters
nc: 10 # number of classes
depth_multiple: 1.0 # model depth multiple
width_multiple: 1.0 # layer channel multiple# anchors
anchors:- [12,16, 19,36, 40,28] # P3/8- [36,75, 76,55, 72,146] # P4/16- [142,110, 192,243, 459,401] # P5/32# yolov7 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [32, 3, 1]], # 0[-1, 1, Conv, [64, 3, 2]], # 1-P1/2 [-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [128, 3, 2]], # 3-P2/4 [-1, 1, Conv, [64, 1, 1]],[-2, 1, Conv, [64, 1, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]], # 11[-1, 1, MP, []],[-1, 1, Conv, [128, 1, 1]],[-3, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 2]],[[-1, -3], 1, Concat, [1]], # 16-P3/8 [-1, 1, Conv, [128, 1, 1]],[-2, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]], # 24[-1, 1, MP, []],[-1, 1, Conv, [256, 1, 1]],[-3, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 2]],[[-1, -3], 1, Concat, [1]], # 29-P4/16 [-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [1024, 1, 1]], # 37[-1, 1, MP, []],[-1, 1, Conv, [512, 1, 1]],[-3, 1, Conv, [512, 1, 1]],[-1, 1, Conv, [512, 3, 2]],[[-1, -3], 1, Concat, [1]], # 42-P5/32 [-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -3, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [1024, 1, 1]], # 50]# yolov7 head
head:[[-1, 1, SPPCSPC, [512]], # 51[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[37, 1, Conv, [256, 1, 1]], # route backbone P4[[-1, -2], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]], # 63[-1, 1, Conv, [128, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[24, 1, Conv, [128, 1, 1]], # route backbone P3[[-1, -2], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1]],[-2, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[-1, 1, Conv, [64, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [128, 1, 1]], # 75[-1, 1, MP, []],[-1, 1, Conv, [128, 1, 1]],[-3, 1, Conv, [128, 1, 1]],[-1, 1, Conv, [128, 3, 2]],[[-1, -3, 63], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]],[-2, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[-1, 1, Conv, [128, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [256, 1, 1]], # 88[-1, 1, MP, []],[-1, 1, Conv, [256, 1, 1]],[-3, 1, Conv, [256, 1, 1]],[-1, 1, Conv, [256, 3, 2]],[[-1, -3, 51], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]],[-2, 1, Conv, [512, 1, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[-1, 1, Conv, [256, 3, 1]],[[-1, -2, -3, -4, -5, -6], 1, Concat, [1]],[-1, 1, Conv, [512, 1, 1]], # 101[75, 1, RepConv, [256, 3, 1]],[88, 1, RepConv, [512, 3, 1]],[101, 1, RepConv, [1024, 3, 1]],[[102,103,104], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5)]
训练数据配置文件如下所示:
# path
train: ./dataset/images/train
val: ./dataset/images/test
test: ./dataset/images/test# number of classes
nc: 10# class names
names: ['0', '1', '2', '3', '4', '5', '6', '7', '8', '9']
终端执行下面的命令即可启动训练:
python train.py --cfg cfg/training/yolov7.yaml --weights weights/yolov7_training.pt --name yolov7 --epochs 100 --batch-size 32 --img 640 640 --device 0 --data data/self.yaml默认100次epoch的迭代计算,终端日志输出如下所示:


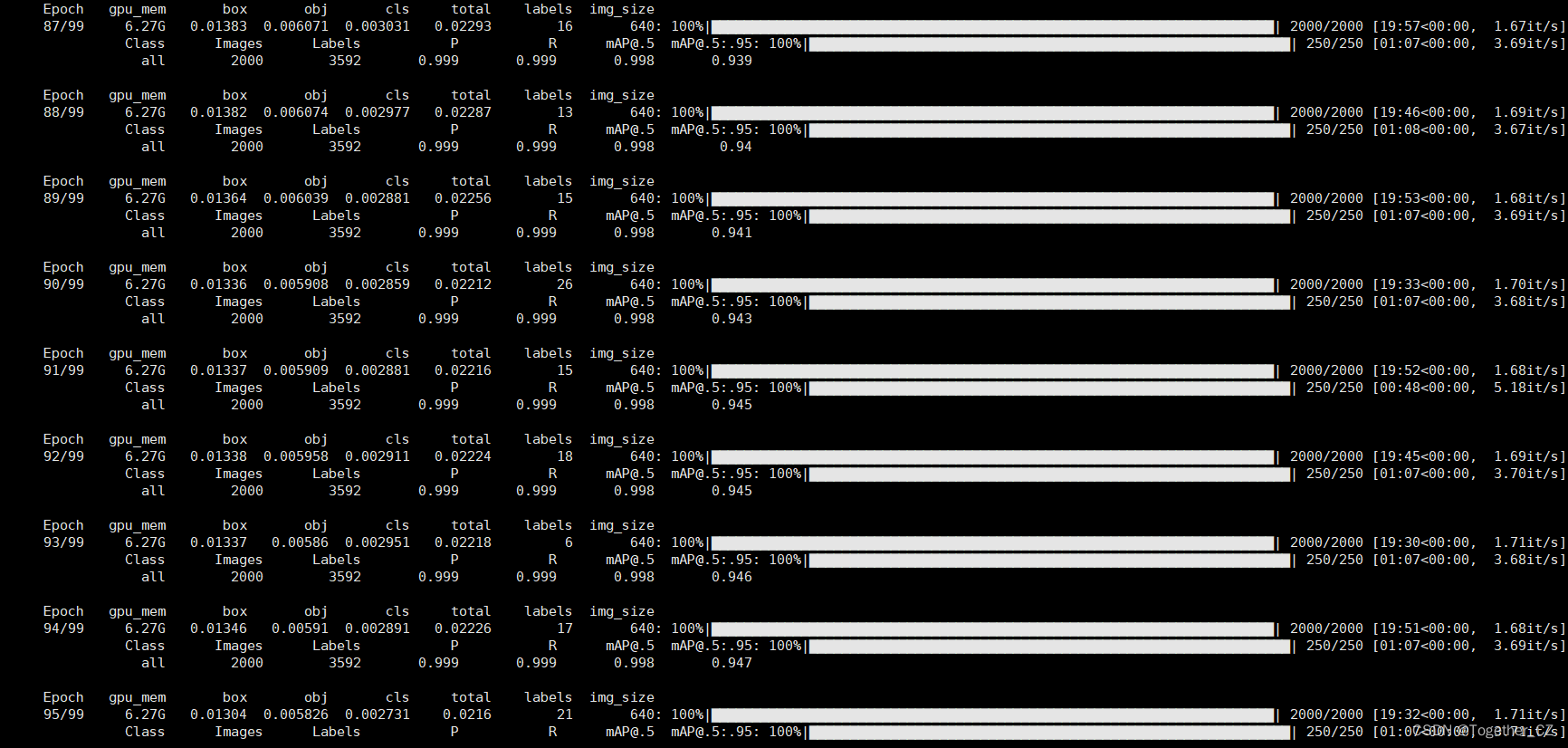
训练完成后来看下结果详情:
【精确率曲线】
精确率曲线(Precision-Recall Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。

【召回率曲线】
召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。
召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。

【PR曲线】
精确率-召回率曲线(Precision-Recall Curve)是一种用于评估二分类模型性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)和召回率(Recall)之间的关系图来帮助我们了解模型在不同阈值下的表现。
精确率是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。

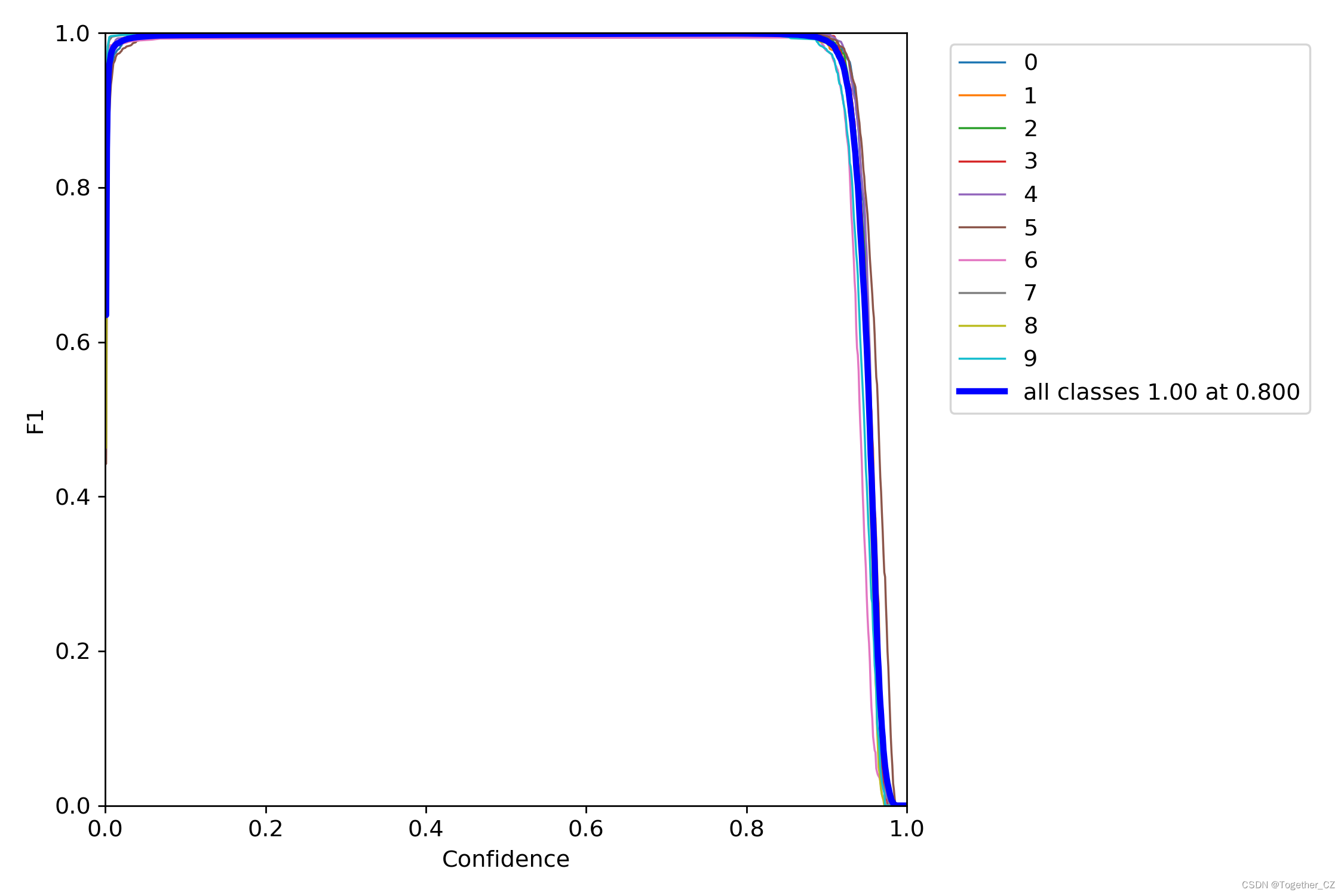
【F1值曲线】
F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。
F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。
【混淆矩阵】

【训练过程可视化】

可以看到整体的训练过程还是相对平稳的。
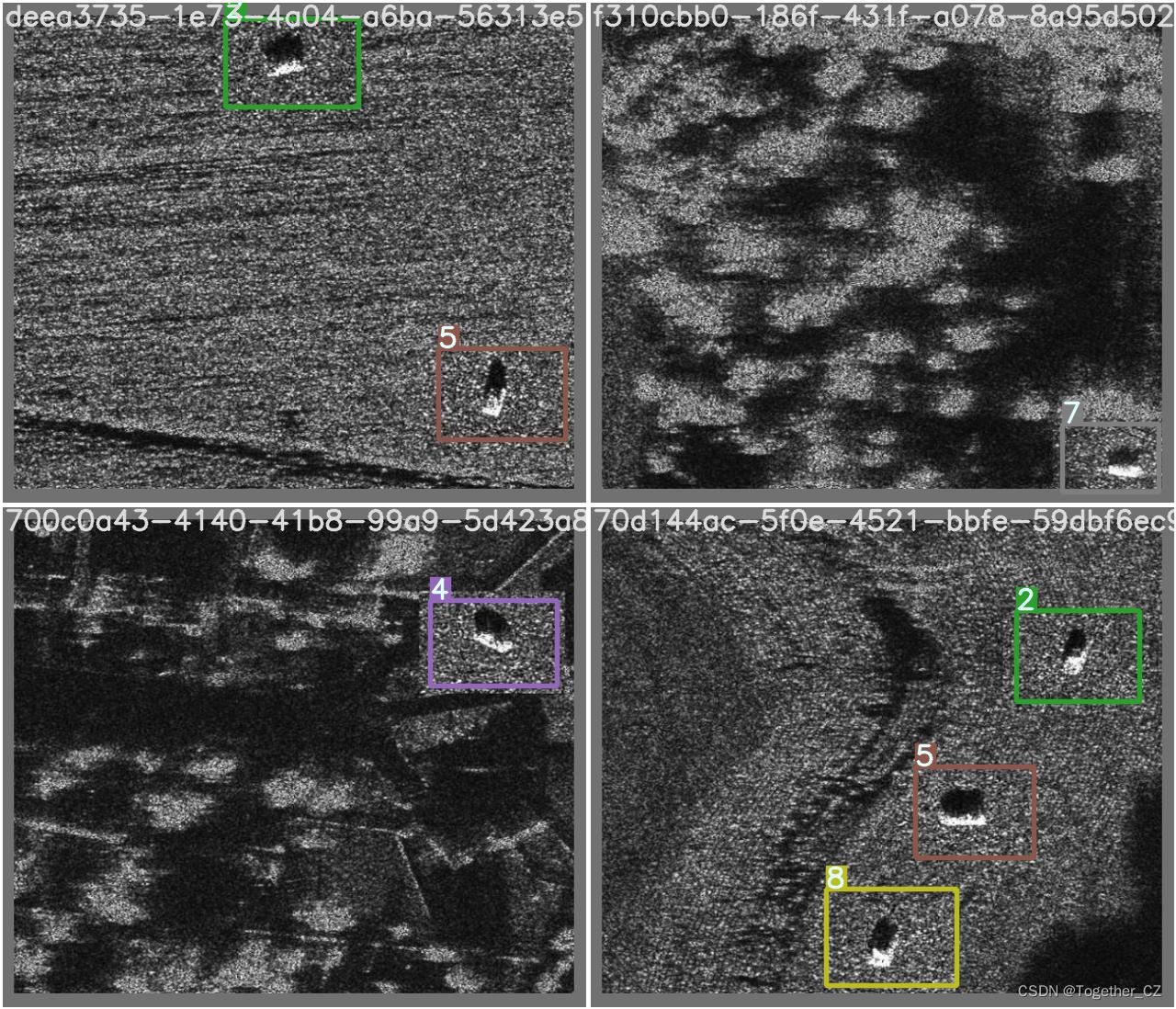
【batch计算实例】如下所示:

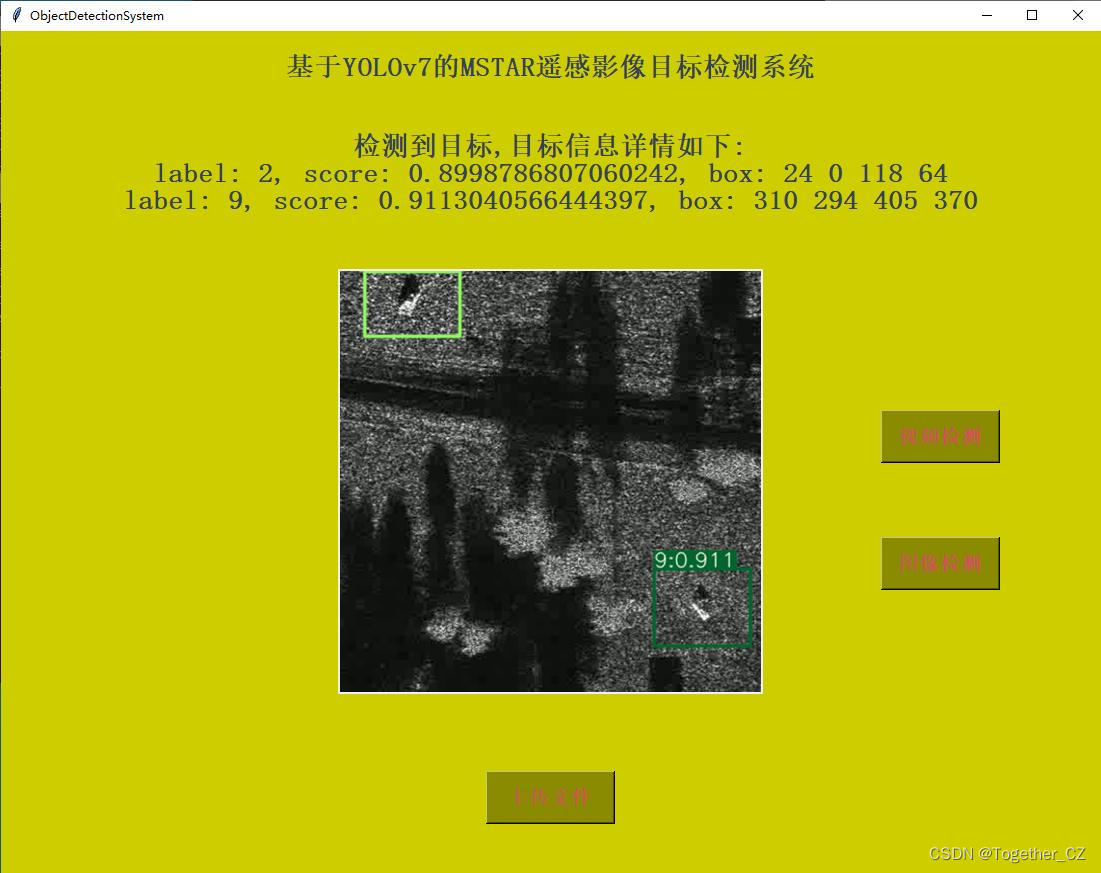
可视化推理实例这块,主要开发实现了:图像检测和视频检测两种类型数据的推理计算,如下图所示:
【图像检测】


【视频检测】

整体检测的效果很不错,后面有时间考虑基于其他类型的检测模型开发尝试一下!
相关文章:
基于YOLOv7开发构建MSTAR雷达影像目标检测系统
MSTAR(Moving and Stationary Target Acquisition and Recognition)数据集是一个基于合成孔径雷达(Synthetic Aperture Radar,SAR)图像的目标检测和识别数据集。它是针对目标检测、机器学习和模式识别算法的研究和评估…...

关于c++中mutable、const、volatile这三个关键字及对应c++与汇编示例源码
这哥三之间的关系是有趣的,不妨看看这个: cv (const and volatile) type qualifiers - cppreference.com mutable permits modification of the class member declared mutable even if the containing object is declared const. 即便一个对象是con…...

把大模型装进手机,分几步?
点击关注 文 | 姚 悦 编 | 王一粟 大模型“跑”进手机,AI的战火已经从“云端”烧至“移动终端”。 “进入AI时代,华为盘古大模型将会来助力鸿蒙生态。”8月4日,华为常务董事、终端BG CEO、智能汽车解决方案BU CEO 余承东介绍,…...

c++游戏制作指南(三):c++剧情类文字游戏的制作
🍿*★,*:.☆( ̄▽ ̄)/$:*.★* 🍿 🍟欢迎来到静渊隐者的csdn博文,本文是c游戏制作指南的一部🍟 🍕更多文章请点击下方链接🍕 🍨 c游戏制作指南dz…...
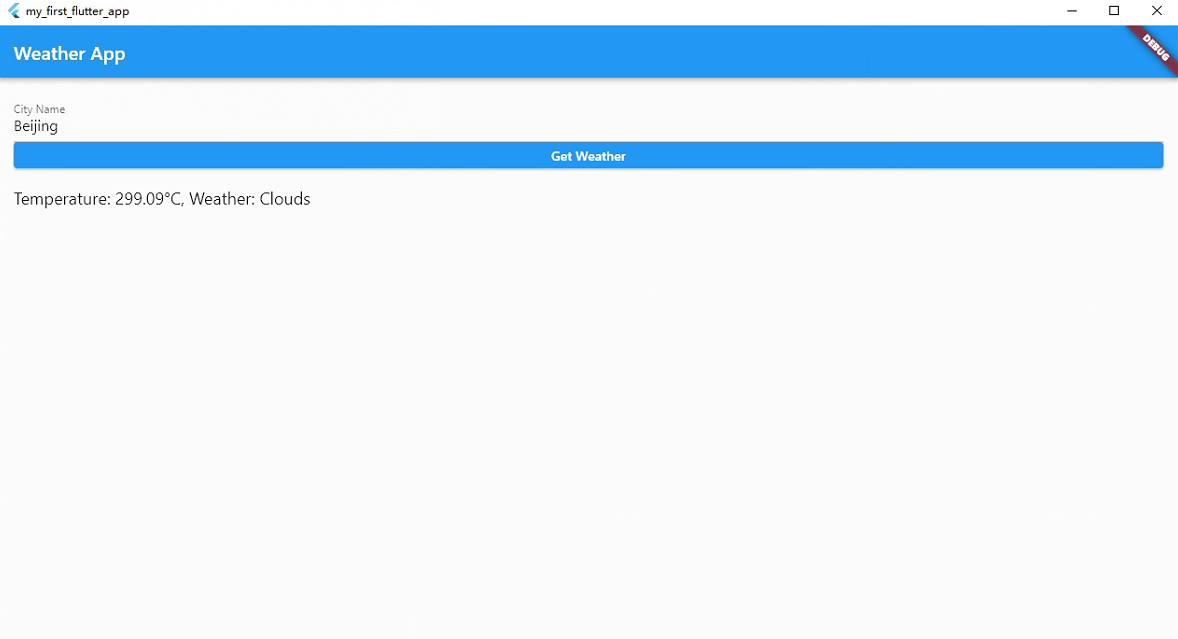
Flutter系列文章-实战项目
在本篇文章中,我们将通过一个实际的 Flutter 应用来综合运用最近学到的知识,包括保存到数据库、进行 HTTP 请求等。我们将开发一个简单的天气应用,可以根据用户输入的城市名获取该城市的天气信息,并将用户查询的城市列表保存到本地…...

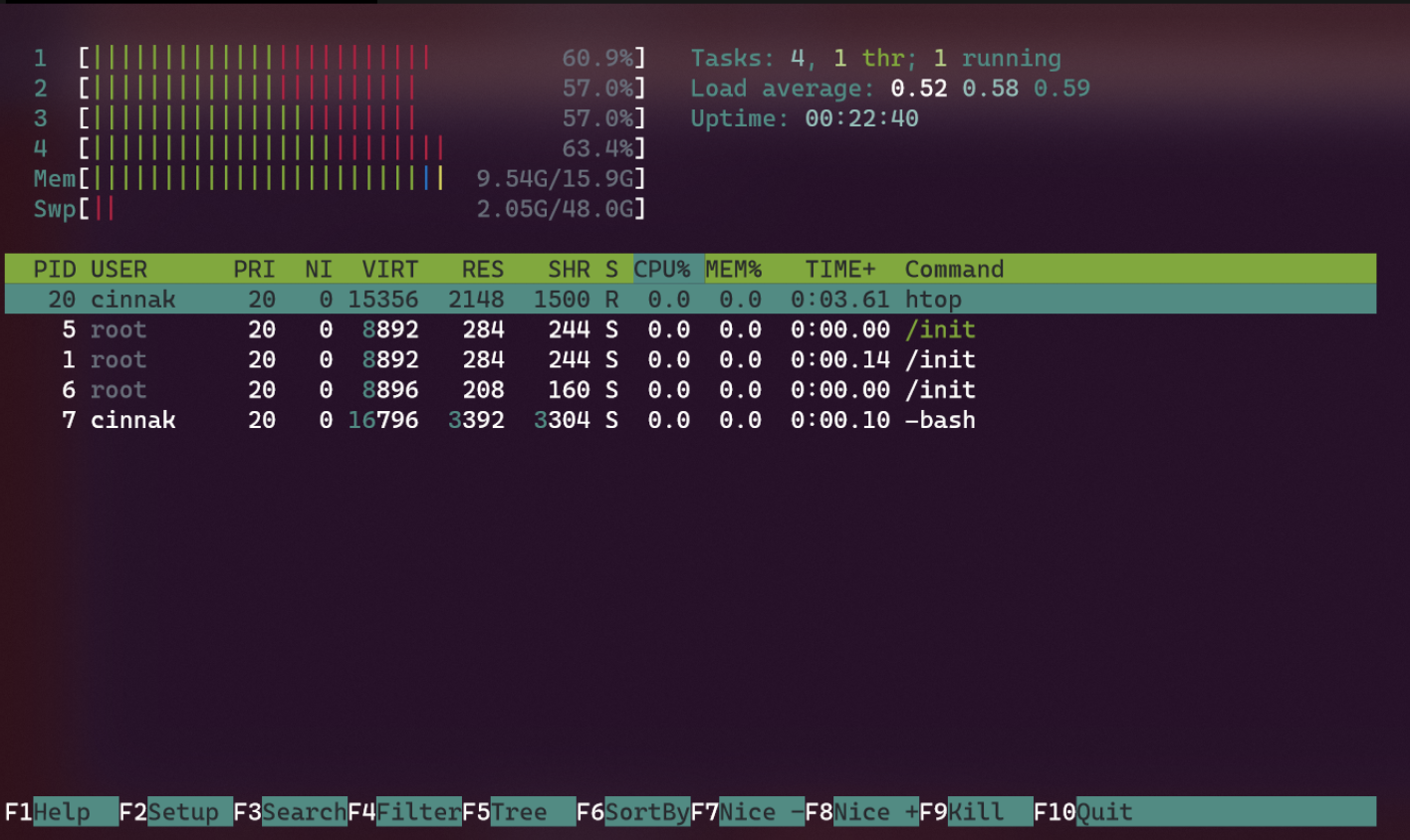
HCIA---TCP/UDP协议
提示:文章写完后,目录可以自动生成,如何生成可参考右边的帮助文档 文章目录 目录 文章目录 一.UDP协议简介 UDP协议的特点: 二.TCP协议简介 TCP协议特点 三.TCP和UDP的区别 思维导图 一.UDP协议简介 UDP(User …...
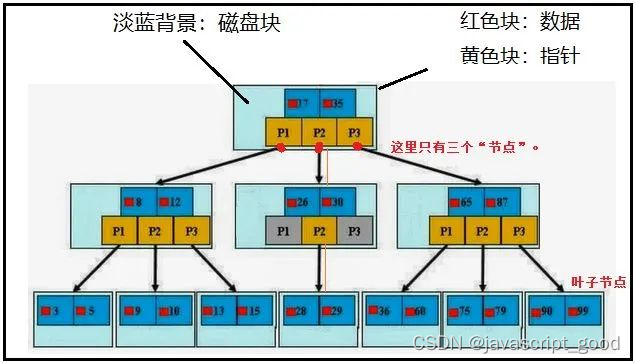
数据库索引的使用
1、MySQL的基本架构 架构图 左边的client可以看成是客户端,客户端有很多,像我们经常你使用的CMD黑窗口,像我们经常用于学习的WorkBench,像企业经常使用的Navicat工具,它们都是一个客户端。右边的这一大堆都可以看成是…...

校验 GPT-4 真实性的三个经典问题:快速区分 GPT-3.5 与 GPT-4,并提供免费测试网站
现在已经有很多 ChatGPT 的套壳网站,以下分享验明 GPT-4 真身的三个经典问题,帮助你快速区分套壳网站背后到底用的是 GPT-3.5 还是 GPT-4。 大家可以在这个网站测试:https://ai.hxkj.vip,免登录可以问三条,登录之后无限…...
)
SpringBoot整合MongoDB连接池(含源码)
💡版本依赖 jdk 17 SpringBoot 3.1.0 Mongo 6.0.8 mybatis-plus 2.0.2 💡环境准备 🌵MongoDB安装 安装教程请查看:一文搞定(linuxwindowsdocker)安装MongoDB 🌵导入依赖 <parent><groupId>org.sp…...
[oeasy]python0082_[趣味拓展]控制序列_清屏_控制输出位置_2J
光标位置 回忆上次内容 上次了解了键盘演化的过程 ESC 从 组合键到 独立按键 ESC的作用 是 进入 控制序列配置 控制信息控制信息 \033[y;xH 设置光标位置\033[2J 清屏 这到底怎么控制???🤔谁来实现这些功能? 控制…...
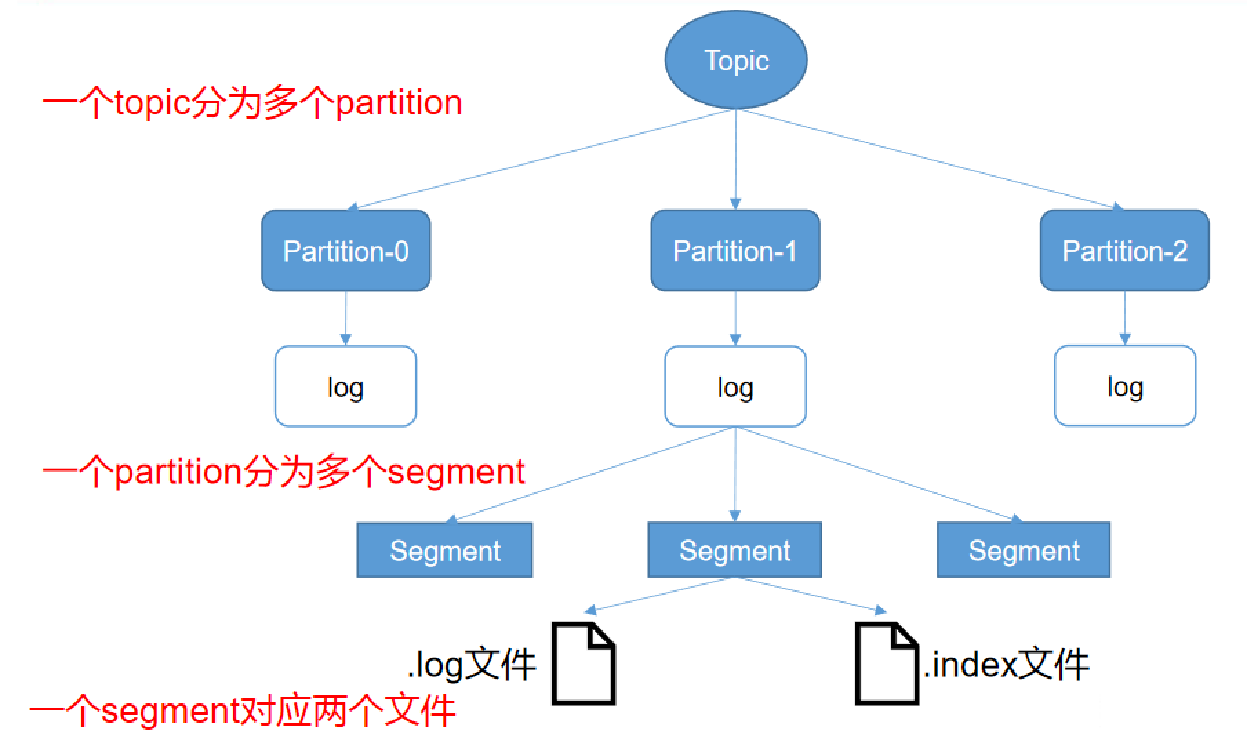
Zookeeper+kafka
目录 1. Zookeeper定义 2. Zookeeper工作机制 3. Zookeeper特点 4. Zookeeper数据结构 5. Zookeeper应用场景 5.1 统一命名服务 5.2 统一配置管理 5.3 统一集群管理 5.4 服务器动态上下线 5.5 软负载均衡 6. Zookeeper 选举机制 6.1 第一次启动选举机制 6.2 非第一…...

Gpt微信小程序搭建的前后端流程 - 前端小程序部分-1.基础页面框架的静态设计(二)
Gpt微信小程序搭建的前后端流程 - 前端小程序部分-1.基础页面框架的静态设计(二) 在开始这个专栏,我们需要找一个小程序为参考,参考和仿照其界面,聊天交互模式。 这里参考小程序-小柠AI智能聊天,可自行先体验。 该小程序主要提供了…...

Flask进阶:构建RESTful API和数据库交互
在初级教程中,我们已经介绍了如何使用Flask构建基础的Web应用。在本篇中级教程中,我们将学习如何用Flask构建RESTful API,以及如何使用Flask-SQLAlchemy进行数据库操作。 一、构建RESTful API REST(Representational State Tran…...
二叉搜索树)
6.9(Java)二叉搜索树
1.我的代码: public class BinarySearchTree {class TreeNode {public int key;public TreeNode left;public TreeNode right;public TreeNode(int key) {this.key key;}}public TreeNode root; // 根节点// 插入一个元素,注意,不能插入重复的值,如…...

洛谷P2256 一中校运会之百米跑
题目背景 在一大堆秀恩爱的 ** 之中,来不及秀恩爱的苏大学神踏着坚定(?)的步伐走向了 100 100 100 米跑的起点。这时苏大学神发现,百米赛跑的参赛同学实在是太多了,连体育老师也忙不过来。这时体育老师发…...
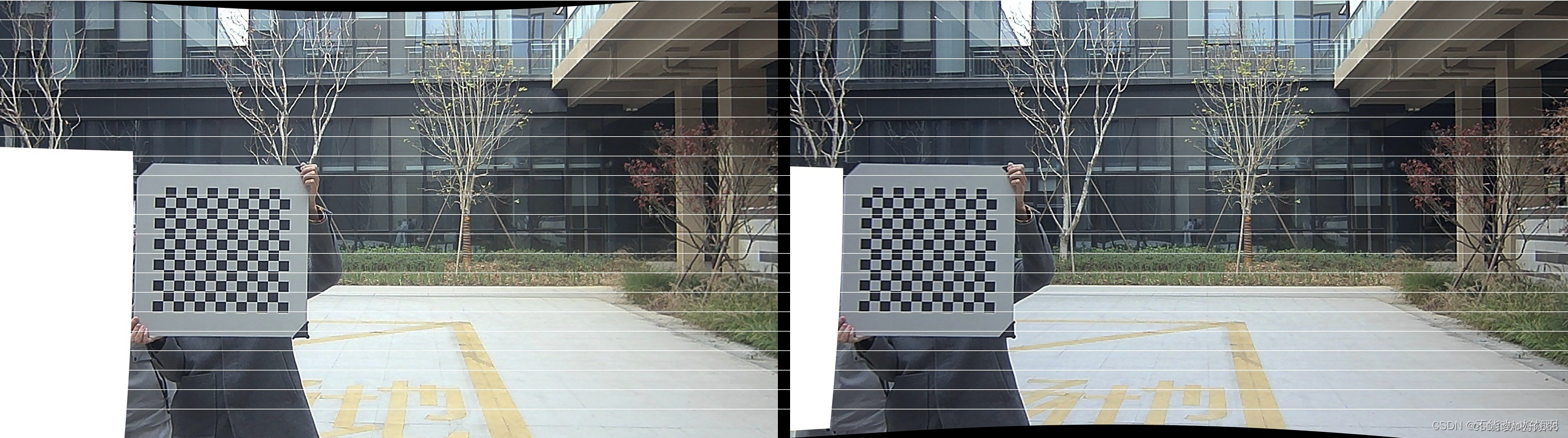
python-opencv对极几何 StereoRectify
OpenCV如何正确使用stereoRectify函数 函数介绍 用于双目相机的立体校正环节中,这里只谈谈这个函数怎么使用,参数具体指哪些函数参数 随便去网上一搜或者看官方手册就能得到参数信息,但是!!相对关系非常容易出错&…...
pom文件---maven
027-Maven 命令行-实验四-生成 Web 工程-执行生成_ev_哔哩哔哩_bilibili 27节.后续补充 一.maven下载安装及配置 1)maven下载 2) settings文件配置本地仓库 3)settings配置远程仓库地址 4)配置maven工程的基础JDK版本 5)确认JDK环境变量配置没问题,配置maven的环境变量 验证…...

界面控件DevExpress.Drawing图形库早期增强功能分享
众所周知,DevExpress在v22.2发布周期中引入了全新的DevExpress.Drawing图形库(并且已经在随后的小更新中引入了一系列增强功能)。 在这篇博文中,我们将总结在DevExpress v23.1中解决的一些问题,以及在EAP构建中为以下…...
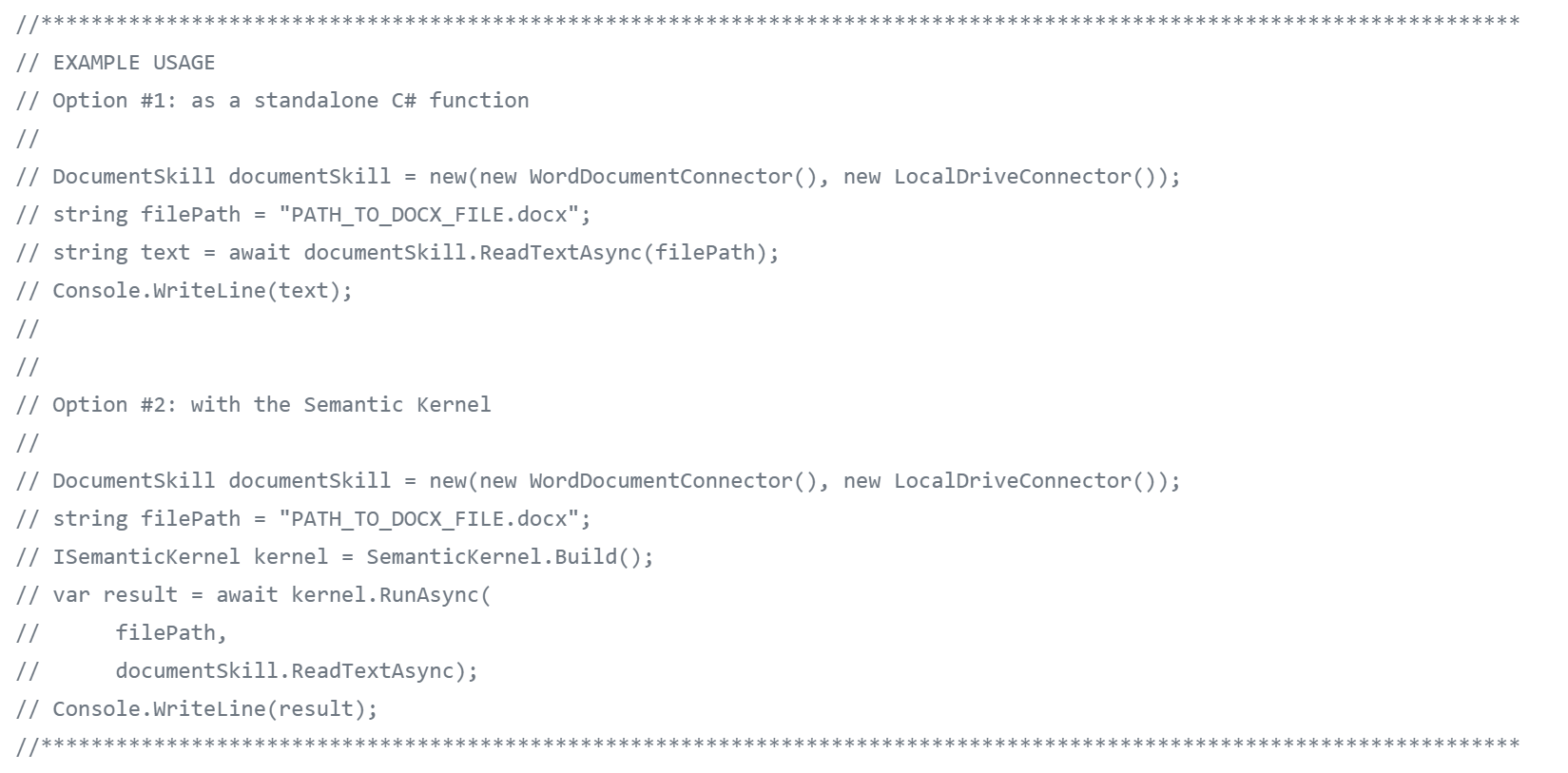
Semantic Kernel 入门系列:Connector连接器
当我们使用Native Function的时候,除了处理一些基本的逻辑操作之外,更多的还是需要进行外部数据源和服务的对接,要么是获取相关的数据,要么是保存输出结果。这一过程在Semantic Kernel中可以被归类为Connector。 Connector更像是…...

Maven介绍-下载-安装-使用-基础知识
Maven介绍-下载-安装-使用-基础知识 Maven的进阶高级用法可查看这篇文章: Maven分模块-继承-聚合-私服的高级用法 文章目录 Maven介绍-下载-安装-使用-基础知识01. Maven1.1 初识Maven1.1.1 什么是Maven1.1.2 Maven的作用 02. Maven概述2.1 Maven介绍2.2 Maven模型…...

【人生底稿 28】新疆出差终章:几番波折终汇报,尽兴踏归津门路
三日游玩尽数落幕,忙碌工作正式回归。轻松的闲暇时光悄然收尾,紧绷的工作状态再次上线。整趟新疆之行,在起伏辗转中迎来最终收尾。一、深夜复盘材料,彻夜待汇报游玩结束回到酒店,我没有松懈休息,静下心重新…...

DownKyi完全指南:三步解锁B站8K视频下载的终极方案
DownKyi完全指南:三步解锁B站8K视频下载的终极方案 【免费下载链接】downkyi 哔哩下载姬downkyi,哔哩哔哩网站视频下载工具,支持批量下载,支持8K、HDR、杜比视界,提供工具箱(音视频提取、去水印等ÿ…...

3DS游戏格式转换实战指南:5步完成CCI到CIA的高效转换
3DS游戏格式转换实战指南:5步完成CCI到CIA的高效转换 【免费下载链接】3dsconv Python script to convert Nintendo 3DS CCI (".cci", ".3ds") files to the CIA format 项目地址: https://gitcode.com/gh_mirrors/3d/3dsconv 作为一名3…...

ncmdumpGUI:3步解决网易云音乐ncm格式播放限制的终极方案
ncmdumpGUI:3步解决网易云音乐ncm格式播放限制的终极方案 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 你是否曾经在网易云音乐下载了心爱的歌曲…...
)
从XTR文件看GNSS数据质量:如何利用Anubis报告优化你的测量方案(以GPS/BDS/Galileo为例)
从XTR文件解码GNSS数据质量:实战分析与优化策略 在GNSS测量领域,数据质量直接决定了最终定位结果的可靠性。XTR文件作为Anubis软件生成的质量报告,包含了大量反映GNSS观测质量的指标参数。对于有经验的工程师而言,这些数字不仅仅是…...

Emacs AI编程助手:ai-code-interface.el深度集成指南
1. 项目概述:一个为Emacs注入AI灵魂的代码接口如果你是一位Emacs的深度用户,同时又对AI辅助编程抱有极大的热情,那么你很可能已经厌倦了在浏览器、终端和编辑器之间反复横跳的割裂体验。tninja/ai-code-interface.el这个项目,正是…...

JetBrains IDE 30天试用重置:一键解决方案的完整实践指南
JetBrains IDE 30天试用重置:一键解决方案的完整实践指南 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 当您正专注于代码调试时,IDE突然弹出"评估期已结束"的红色警告…...
)
【Midjourney数字艺术风格终极指南】:20年AI视觉专家亲授7大核心风格参数调优法则(含V6.1新增Realism Mode实测数据)
更多请点击: https://intelliparadigm.com 第一章:Midjourney数字艺术风格演进与V6.1核心变革 Midjourney自V1发布以来,其图像生成范式经历了从纹理模拟到语义理解、从风格模仿到跨模态协同的深层跃迁。V6.1标志着模型首次在原生架构中集成…...

基于LLM的游戏AI智能体:从感知到决策的框架构建与实践
1. 项目概述:一个能“玩”游戏的AI智能体最近在GitHub上看到一个挺有意思的项目,叫ChattyPlay-Agent。光看名字,你可能会觉得这又是一个基于大语言模型的聊天机器人。但点进去仔细研究后,我发现它的定位非常独特:这是一…...

数据分析师能力展示:从项目构建到报告呈现的完整指南
1. 项目概述:一个数据分析师的能力展示平台最近在GitHub上看到一个挺有意思的项目,叫“dataanalyst-showcase”。光看名字,你可能会觉得这又是一个数据科学项目合集,但点进去仔细研究后,我发现它的定位非常精准——它不…...