opencv-StereoBM算法
原理解释
目前立体匹配算法是计算机视觉中的一个难点和热点,算法很多,但是一般的步骤是:
A、匹配代价计算
匹配代价计算是整个立体匹配算法的基础,实际是对不同视差下进行灰度相似性测量。常见的方法有灰度差的平方SD(squared intensity differences),灰度差的绝对值AD(absolute intensity differences)等。另外,在求原始匹配代价时可以设定一个上限值,来减弱叠加过程中的误匹配的影响。以AD法求匹配代价为例,可用下式进行计算,其中T为设定的阈值。
这就是在参数设置中阈值的作用,在视差图中经常有黑色区域,就是和阈值的设置关。
B、 匹配代价叠加
一般来说,全局算法基于原始匹配代价进行后续算法计算。而区域算法则需要通过窗口叠加来增强匹配代价的可靠性,根据原始匹配代价不同,可分为:
此图是核心算法的解释,就是计算区域内像素差值,可以为单个像素也可以为一定区域内,主要看SAD的窗口大小的设置,同时SAD设置决定误匹配的多少和运算效率问题,所以大小设置一定要很慎重。
C、 视差获取
对于区域算法来说,在完成匹配代价的叠加以后,视差的获取就很容易了,只需在一定范围内选取叠加匹配代价最优的点(SAD和SSD取最小值,NCC取最大值)作为对应匹配点,如胜者为王算法WTA(Winner-take-all)。而全局算法则直接对原始匹配代价进行处理,一般会先给出一个能量评价函数,然后通过不同的优化算法来求得能量的最小值,同时每个点的视差值也就计算出来了。
D、视差细化(亚像素级)
大多数立体匹配算法计算出来的视差都是一些离散的特定整数值,可满足一般应用的精度要求。但在一些精度要求比较高的场合,如精确的三维重构中,就需要在初始视差获取后采用一些措施对视差进行细化,如匹配代价的曲线拟合、图像滤波、图像分割等。
亚像素级的处理就是涉及到BMState参数设置后后续参数的设置了。
有关立体匹配的介绍和常见匹配算法的比较,推荐大家看看Stefano Mattoccia 的讲义 Stereo Vision: algorithms and applications,190页的ppt,讲解得非常形象详尽。
预处理滤波参数
/*匹配图像预处理*/
setPreFilterType(cv::StereoBM::PREFILTER_XSOBEL);
预处理滤波器类型,有两种可选类型:PREFILTER_NORMALIZED_RESPONSE(归一化响应) 或者 PREFILTER_XSOBEL (水平方向Sobel算子,默认类型)
setPreFilterCap (int preFilterCap)
预处理滤波器的截断值,预处理的输出值仅保留[-preFilterCap, preFilterCap]范围内的值,参数范围:1 - 31(文档中是31,但代码中是 63), int
setPreFilterSize (int preFilterSize)
预处理滤波器窗口大小,容许范围是[5,255],一般应该在 5x5..21x21 之间,参数必须为奇数值
SAD 参数
setBlockSize(int blockSize);//SAD窗口大小
块大小,应为奇数,取值【3,11】比较合适,较大的块大小意味着更平滑但不太准确的视差图。 较小的块大小提供了更详细的视差图,但算法发现错误对应关系的机会更高。
SAD窗口大小,容许范围是[5,255],一般应该在 5x5 至 21x21 之间,参数必须是奇数,int 型
setMinDisparity(int minDisparity);
最小视差,默认值为 0, 可以是负值,int 型
setNumDisparities(nmDisparities); //视差搜索范围
视差窗口,即最大视差值与最小视差值之差, 窗口大小必须是 16 的整数倍,int 型
搜索视差时的范围【MinDisparity,MinDisparity+numOfDisparities】,必须为16的整数倍
后处理参数
在算出初始视差图后会进行视差图后处理,包括中值滤波,连通域检测等。中值滤波能够有效去除视差图中孤立的噪点,而连通域检测能够检测出视差图中因噪声引起小团块(blob)。判断当前像素点四邻域的邻域点与当前像素点的差值diff,如果diff<speckRange,则表示该邻域点与当前像素点是一个连通域并设置一个标记。然后再以该邻域点为中心判断其四邻域点,步骤同上。直至某一像素点四邻域的点均不满足条件,则停止。然后判断被标记的像素点个数count,如果像素点count<=speckleWindowSize,则说明该连通域是一个小团块(blob),因此将当前像素点值设置为newValue(表示错误的视差值,newValue一般设置为负数或者0值)。否则,表示该连通域是个大团块,不做处理。所有像素点处理后,满足条件的区域会被设置为newValue值,后续可以用空洞填充等方法重新估计其视差值。
setDisp12MaxDiff (int disp12MaxDiff)
//左视差图(直接计算得出)和右视差图(通过cvValidateDisparity计算得出)之间的最大容许差异。超过该阈值的视差值将被清零。该参数默认为 -1,即不执行左右视差检查。
setUniquenessRatio (int uniquenessRatio)
视差唯一性百分比, 视差窗口范围内最低代价是次低代价的(1 + uniquenessRatio/100)倍时,最低代价对应的视差值才是该像素点的视差,否则该像素点的视差为 0 (the minimum margin in percents between the best (minimum) cost function value and the second best value to accept the computed disparity, that is, accept the computed disparity d^ only if SAD(d) >= SAD(d^) x (1 + uniquenessRatio/100.) for any d != d*+/-1 within the search range ),该参数不能为负值,一般5-15左右的值比较合适,int 型
setSpeckleRange (int speckleRange)
speckleRange:视差变化阈值,当窗口内视差变化大于阈值时,该窗口内的视差清零,int 型
在sgbm的官方参数介绍中说该值会被乘以16,设置为1或2比较合适,bm应该是没有乘以16
setTextureThreshold (int textureThreshold)
低纹理区域的判断阈值,如果当前窗口内所有邻居像素点的x导数绝对值之和小于指定阈值,则该窗口对应的像素点的视差值为0(That is, if the sum of absolute values of x-derivatives computed over SADWindowSize by SADWindowSize pixel neighborhood is smaller than the parameter, no disparity is computed at the pixel),该参数不能为负值,int 型
setSpeckleWindowSize (int speckleWindowSize)
检查视差连通区域变化度的窗口大小, 值为 0 时取消 speckle 检查,int 型
检查视差连通区域变化度的窗口大小, 值为 0 时取消 speckle 检查,否则取【50,200】内的值比较合适
setROI1 (Rect roi1) setROI2 (Rect roi2)
roi1, roi2:左右视图的有效像素区域,一般由双目校正阶段的 cvStereoRectify 函数传递,也可以自行设定。一旦在状态参数中设定了 roi1 和 roi2,OpenCV 会通过cvGetValidDisparityROI 函数计算出视差图的有效区域,在有效区域外的视差值将被清零。
在上述参数中,对视差生成效果影响较大的主要参数是 SADWindowSize、numberOfDisparities 和 uniquenessRatio 三个,一般只需对这三个参数进行调整,其余参数按默认设置即可。
https://blog.csdn.net/chenyusiyuan/article/details/5967291
https://blog.csdn.net/CipherPolzz/article/details/122349550
https://blog.csdn.net/KinboSong/article/details/72918432
https://blog.csdn.net/ADDfish/article/details/110433598
相关文章:

opencv-StereoBM算法
原理解释目前立体匹配算法是计算机视觉中的一个难点和热点,算法很多,但是一般的步骤是:A、匹配代价计算匹配代价计算是整个立体匹配算法的基础,实际是对不同视差下进行灰度相似性测量。常见的方法有灰度差的平方SD(squ…...
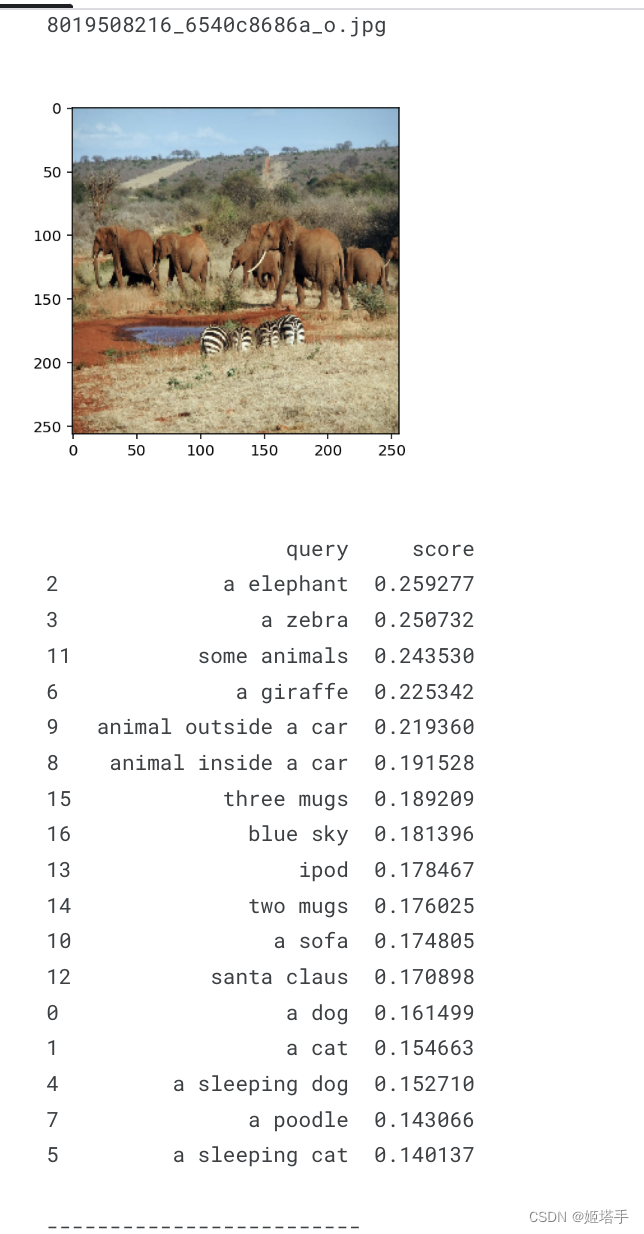
图像分类竞赛进阶技能:OpenAI-CLIP使用范例
OpenAI-CLIP 官方介绍 尽管深度学习已经彻底改变了计算机视觉,但目前的方法存在几个主要问题:典型的视觉数据集是劳动密集型的,创建成本高,同时只教授一组狭窄的视觉概念;标准视觉模型擅长于一项任务且仅擅长于一项任务,并且需要大…...

Metasploit框架基础(一)
文章目录前言一、基础认知二、批量POC/EXP的构想三、poc检测框架的简单实现四、xray五、Meatsploit框架参考前言 Metasploit 一款渗透测试框架漏洞利用的集合与构建和定制满足你的需求的基础漏洞利用和验证的工具 这几个说法都是百度或者官方文档中出现的手法,说…...
——标签转换与数据加载)
pytorch零基础实现语义分割项目(二)——标签转换与数据加载
数据转换与加载项目列表前言标签转换RGB标签到类别标签映射RGB标签转换成类别标签数据数据加载随机裁剪数据加载项目列表 语义分割项目(一)——数据概况及预处理 语义分割项目(二)——标签转换与数据加载 语义分割项目&#x…...

python(8.5)--列表习题
目录 一、求输出结果题 二、计算列表元素个数 三、查找是否存在某元素 四、删除某元素 五、如何在列表中插入元素 六、如何从列表中删除重复的元素 七、 如何将列表中的元素按照从小到大的顺序排序 八、从列表中删除重复的元素 九、大到小的顺序排序 一、求输出结…...
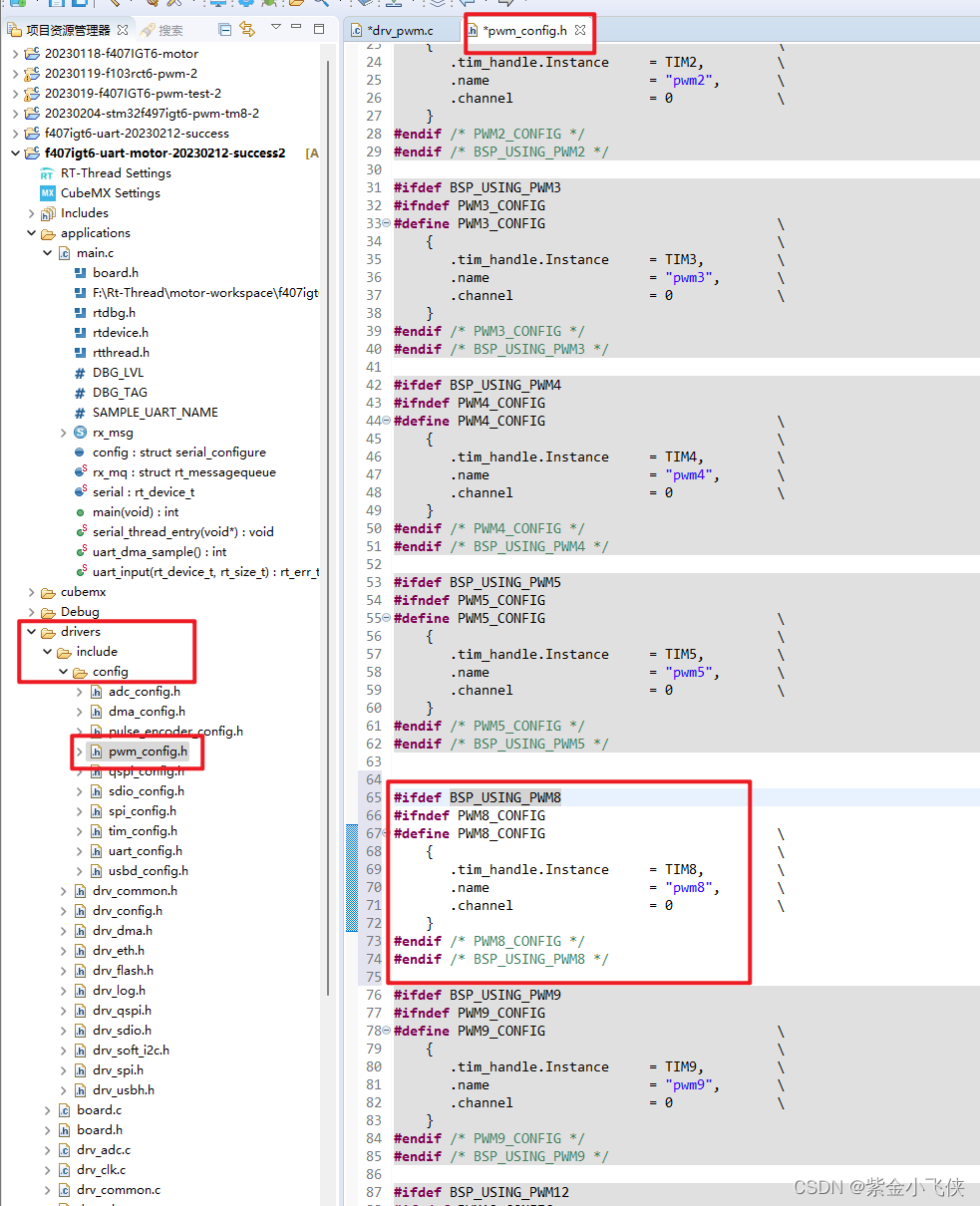
rt-thread pwm 多通道
一通道pwm参考 https://blog.csdn.net/yangshengwei230612/article/details/128738351?spm1001.2014.3001.5501 以下主要是多通道与一通道的区别 芯片 stm32f407rgt6 1、配置PWM设备驱动相关宏定义 添加PWM宏定义 #define BSP_USING_PWM8 #define BSP_USING_PWM8_CH1 #d…...

C语言练习 | 初学者经典练习汇总
目录 1、下面代码输出多少,为什么? 2、你要好好学习么? 3、一直写代码, 4、两个数求最大值 5、输入1-5输出工作日,输入6-7输出休息日,其他输入错误 6、写一个输入密码的代码 7、怎么样当输入数字时候…...
 | 机试题算法思路 【2023】)
华为OD机试 - 自动曝光(Python) | 机试题算法思路 【2023】
最近更新的博客 华为OD机试 - 卡片组成的最大数字(Python) | 机试题算法思路 华为OD机试 - 网上商城优惠活动(一)(Python) | 机试题算法思路 华为OD机试 - 统计匹配的二元组个数(Python) | 机试题算法思路 华为OD机试 - 找到它(Python) | 机试题算法思路 华为OD机试…...

「6」线性代数(期末复习)
🚀🚀🚀大家觉不错的话,就恳求大家点点关注,点点小爱心,指点指点🚀🚀🚀 目录 第五章 相似矩阵及二次型 &2)方阵的特征值与特征向量 &3ÿ…...
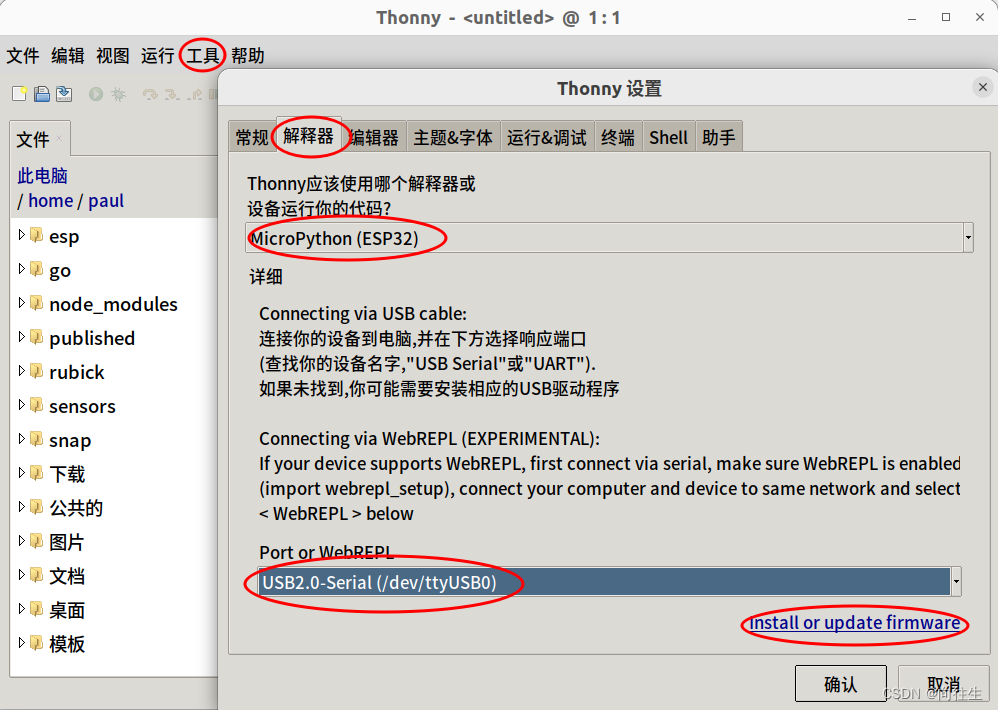
1.1 硬件与micropython固件烧录及自编译固件
1.ESP32硬件和固件 淘宝搜ESP32模块,20-50元都有,自带usb口,即插即用. 固件下载地址:MicroPython - Python for microcontrollers 2.烧录方法 为简化入门难度,建议此处先使用带GUI的开发工具THonny,记得不是给你理发的tony老师. 烧录的入口是: 后期通过脚本一次型生成和烧…...
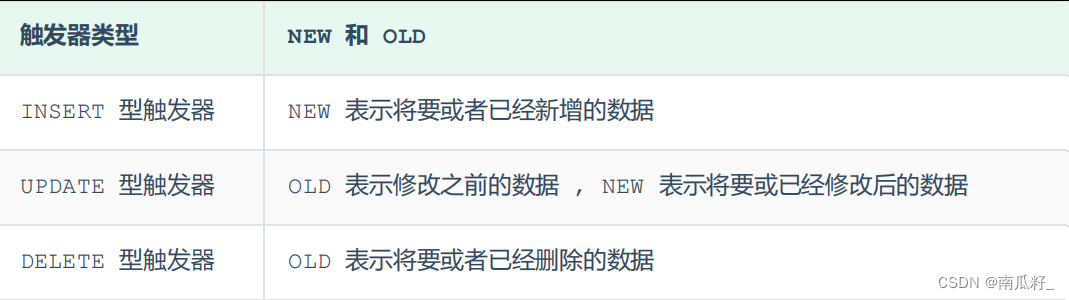
【MySQL进阶】视图 存储过程 触发器
😊😊作者简介😊😊 : 大家好,我是南瓜籽,一个在校大二学生,我将会持续分享Java相关知识。 🎉🎉个人主页🎉🎉 : 南瓜籽的主页…...

[Linux篇] Linux常见命令和权限
文章目录使用XShell登录Linux1.Linux常用基本命令:1.1 ls(列出当前的目录下都有哪些文件和目录)1.2 cd (change directory 切换目录)1.3 pwd(查看当前目录的绝对路径)1.4 touch(创建文件)1.5 ca…...

29岁从事功能测试被辞,面试2个月都找不到工作吗?
最近一个28岁老同学联系我,因为被公司辞退,找我倾诉,于是写下此文。 他是14年二本毕业,在我的印象里人特别懒,不爱学习,专业不好,毕业前因为都没找到合适工作,直接去创业了…...

【C#个人错题笔记1】
观前提醒 记录一些我不会或者少见的内容,不一定适合所有人 字符串拼接 int a3,b8; Console.WriteLine(ab);//11 Console.WriteLine("ab");//ab Console.WriteLine(a""b);//38 Console.WriteLine("ab"ab);//ab38 Console.WriteLine…...

基于lambda的mongodb查询插件
需求背景需要一个像mybatis plus 一样的基于lambda, 且面向对象的查询mongo数据的插件。在网上找了很久,没有发现有类似功能的插件。于是自己手写了一个,借助mongoTemplate屏蔽了底层查询语句的实现细节。在此基础上,实现了查询的统一封装。技…...
基于微信小程序的微信社团小程序
文末联系获取源码 开发语言:Java 框架:ssm JDK版本:JDK1.8 服务器:tomcat7 数据库:mysql 5.7/8.0 数据库工具:Navicat11 开发软件:eclipse/myeclipse/idea Maven包:Maven3.3.9 浏览器…...
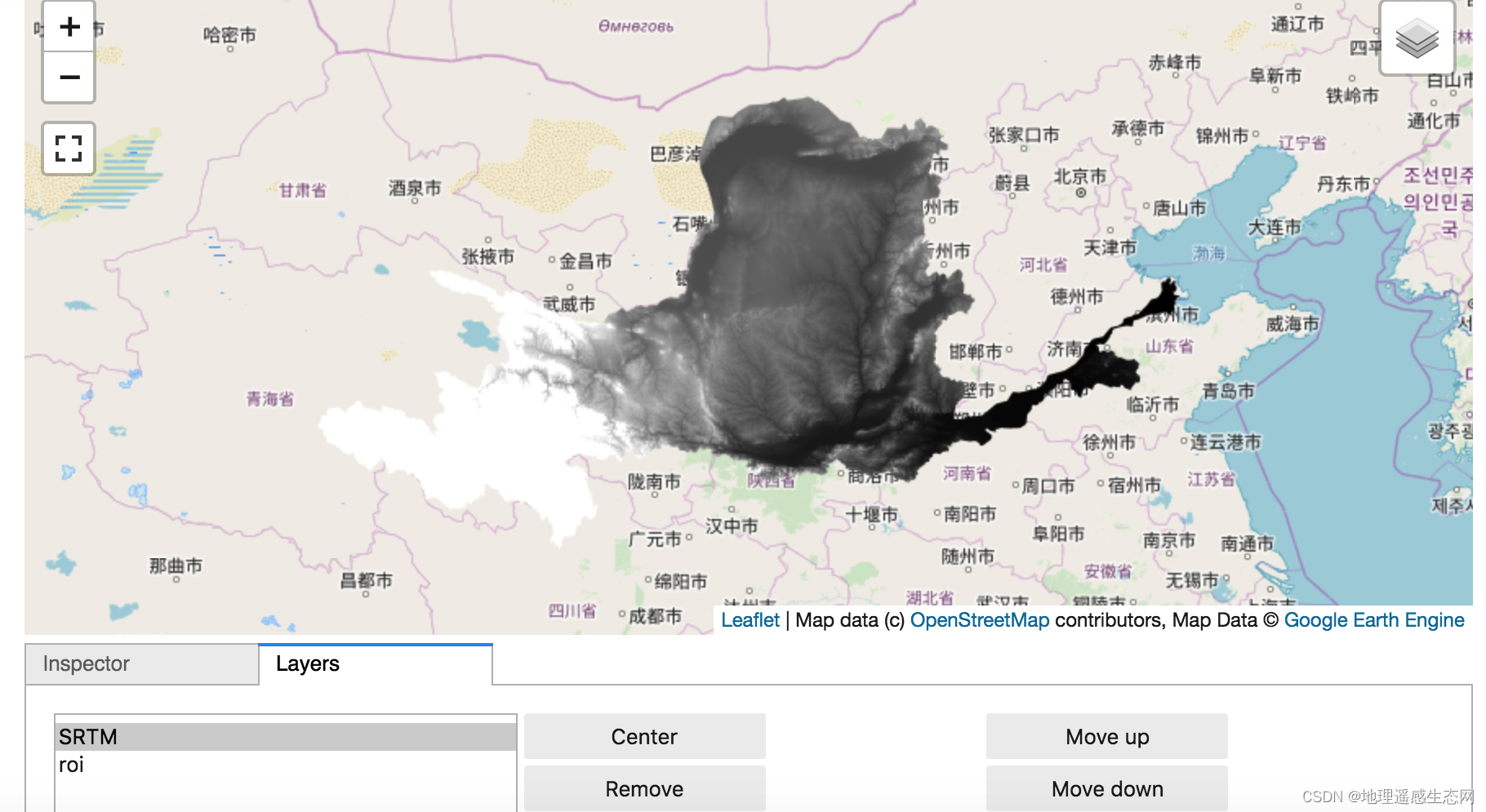
GEE学习笔记 七十三:【GEE之Python版教程七】静态展示影像和动态展示影像
我们使用GEE在线编辑可以直接通过在线的网页可以加载展示我们计算的结果,而python版的GEE要展示我们的计算结果可能就比较麻烦。如果有同学看过GEE的python版API中可以找到一个类ee.mapclient,这个类的介绍是它是GEE官方通过Tk写的一个加载展示地图的类。…...
PGLBox全面解决图训练速度、成本、稳定性、复杂算法四大问题!
图神经网络(Graph Neural Network,GNN)是近年来出现的一种利用深度学习直接对图结构数据进行学习的方法,通过在图中的节点和边上制定聚合的策略,GNN能够学习到图结构数据中节点以及边内在规律和更加深层次的语义特征。…...
使用入门篇)
超详细的 pytest 教程(一)使用入门篇
前言 pytest到目前为止还没有翻译的比较好全面的使用文档,很多英文不太好的小伙伴,在学习时看英文文档还是很吃力。本来去年就计划写pytest详细的使用文档的,由于时间关系一直搁置,直到今天才开始写。本文是第一篇,主…...
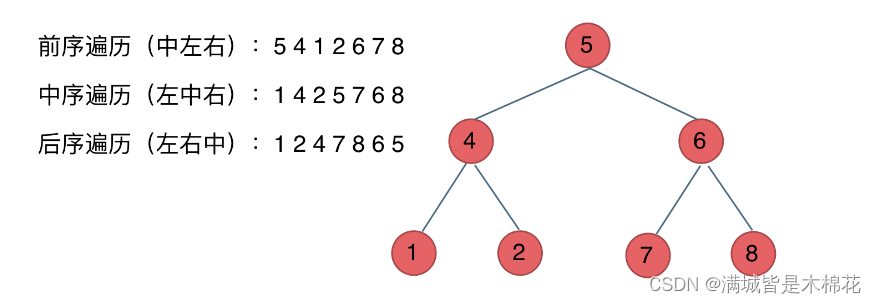
二叉树理论基础知识点
二叉树的种类 在我们解题过程中二叉树有两种主要的形式:满二叉树和完全二叉树 满二叉树 满二叉树:如果一棵二叉树只有度为0的结点和度为2的结点,并且度为0的结点在同一层上,则这棵二叉树为满二叉树。 如图所示: 这…...

未来是神经-符号的:AI 推理是如何演变的
原文:towardsdatascience.com/the-future-is-neuro-symbolic-how-ai-reasoning-is-evolving-143ce6485b4f 人工智能软件被用于增强本文文本的语法、流畅性和可读性。 一个名为AlphaGeometry的显著新 AI 系统最近解决了大多数人类都难以解决的困难高中水平数学问题。…...

高速SOIC插座技术解析:从原理到工程实践
1. 高速SOIC插座的技术演进与核心价值在射频和高速数字电路设计中,工程师们经常面临一个经典矛盾:既要保证芯片测试的便捷性,又不能牺牲信号完整性。传统DIP插座在MHz级频率下尚能应付,但当频率攀升至GHz领域时,其机械…...

网络出口IP管理工具ipman:原理、使用与实战指南
1. 项目概述与核心价值最近在折腾网络工具和代理配置时,发现了一个挺有意思的开源项目,叫twisker/ipman。乍一看这个名字,可能会联想到IP地址管理,但实际上,它的定位更偏向于一个轻量级的、用于在特定网络环境下管理和…...

WebToEpub:3分钟将网页小说转为EPUB电子书的终极解决方案
WebToEpub:3分钟将网页小说转为EPUB电子书的终极解决方案 【免费下载链接】WebToEpub A simple Chrome (and Firefox) Extension that converts Web Novels (and other web pages) into an EPUB. 项目地址: https://gitcode.com/gh_mirrors/we/WebToEpub 还在…...

如何用CLIP-as-service实现半监督学习:有限标注数据的终极指南
如何用CLIP-as-service实现半监督学习:有限标注数据的终极指南 【免费下载链接】clip-as-service 🏄 Scalable embedding, reasoning, ranking for images and sentences with CLIP 项目地址: https://gitcode.com/gh_mirrors/cl/clip-as-service …...
终极指南:从入门到实战的完整教程)
多尺度地理加权回归(MGWR)终极指南:从入门到实战的完整教程
多尺度地理加权回归(MGWR)终极指南:从入门到实战的完整教程 【免费下载链接】mgwr Multiscale Geographically Weighted Regression (MGWR) 项目地址: https://gitcode.com/gh_mirrors/mg/mgwr 面对复杂多变的空间数据,传统的地理加权回归(GWR)常…...

FPGA与以太网:从MII接口到UDP通信的实战解析
1. 以太网通信与FPGA开发入门 第一次接触FPGA以太网开发时,我被各种专业术语搞得晕头转向。MII、PHY、MAC、UDP这些名词像天书一样,直到真正动手做了一个数据采集项目才豁然开朗。以太网通信看似复杂,其实拆解开来就是硬件接口协议栈数据处理…...

语音提示工程实战:从原理到应用,构建高质量AI语音交互
1. 项目概述:语音提示工程的“Awesome”宝库如果你正在探索语音AI应用,或者对如何让ChatGPT、Claude这类大语言模型“开口说话”感到好奇,那么你很可能已经遇到了一个核心难题:如何写出一个真正有效的语音提示词?这不仅…...
,大幅提升查询效率)
MIMIC-IV 2.2 数据安装后必做:一键生成官方物化视图(PostgreSQL版),大幅提升查询效率
MIMIC-IV 2.2 数据安装后必做:一键生成官方物化视图(PostgreSQL版),大幅提升查询效率 在医疗数据分析领域,MIMIC-IV数据库无疑是一座金矿,但这座金矿的入口却布满了荆棘。许多研究人员在费尽周折完成基础数…...
)
仅限档案学研究者获取:NotebookLM定制提示词库V2.3(含17个NARA/中国第一历史档案馆认证模板)
更多请点击: https://intelliparadigm.com 第一章:NotebookLM档案学研究辅助 NotebookLM 是 Google 推出的基于 LLM 的研究型笔记工具,其核心能力在于对用户上传的私有文档(如 PDF、TXT、DOCX)进行语义理解与上下文关…...