Clion开发Stm32之存储模块(W25Q64)驱动编写
前言
涵盖之前文章:
- Clion开发STM32之HAL库SPI封装(基础库)
W25Q64驱动
头文件
#ifndef F1XX_TEMPLATE_MODULE_W25Q64_H
#define F1XX_TEMPLATE_MODULE_W25Q64_H#include "sys_core.h"
/* Private typedef -----------------------------------------------------------*/
//#define sFLASH_ID 0xEF3015 //W25X16
//#define sFLASH_ID 0xEF4015 //W25Q16
#define sFLASH_ID 0XEF4017 //W25Q64
//#define sFLASH_ID 0XEF4018 //W25Q128
//#define SPI_FLASH_PageSize 4096
#define SPI_FLASH_PageSize 256
#define SPI_FLASH_PerWritePageSize 256/* Private define ------------------------------------------------------------*/
/*命令定义-开头*******************************/
#define W25X_WriteEnable 0x06
#define W25X_WriteDisable 0x04
#define W25X_ReadStatusReg 0x05
#define W25X_WriteStatusReg 0x01
#define W25X_ReadData 0x03
#define W25X_FastReadData 0x0B
#define W25X_FastReadDual 0x3B
#define W25X_PageProgram 0x02
#define W25X_BlockErase 0xD8
#define W25X_SectorErase 0x20
#define W25X_ChipErase 0xC7
#define W25X_PowerDown 0xB9
#define W25X_ReleasePowerDown 0xAB
#define W25X_DeviceID 0xAB
#define W25X_ManufactDeviceID 0x90
#define W25X_JedecDeviceID 0x9F
#define WIP_Flag 0x01 /* Write In Progress (WIP) flag */
#define Dummy_Byte 0xFF
/*等待超时时间*/
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x5000)
#define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT))/*** @memberof driver_init 驱动初始化* @memberof cs_low 使能低* @memberof cs_high 使能高* @memberof send_and_rec 发送并接收*/
typedef struct {void (*driver_init)(void);void (*cs_low)(void);void (*cs_high)(void);uint8_t (*send_and_rec)(uint8_t dat);} W25Q64_cnf_t;void W25Q64_cnf_set(W25Q64_cnf_t *cnf);bool W25Q64_Init(void);void SPI_FLASH_SectorErase(uint32_t SectorAddr);void SPI_FLASH_BulkErase(void);void SPI_FLASH_PageWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);void SPI_FLASH_BufferWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite);void SPI_FLASH_BufferRead(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead);uint32_t SPI_FLASH_ReadID(void);uint32_t SPI_FLASH_ReadDeviceID(void);void SPI_FLASH_StartReadSequence(uint32_t ReadAddr);void SPI_Flash_PowerDown(void);void SPI_Flash_WAKEUP(void);uint8_t SPI_FLASH_ReadByte(void);uint8_t SPI_FLASH_SendByte(uint8_t byte);void SPI_FLASH_WriteEnable(void);void SPI_FLASH_WaitForWriteEnd(void);uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode);#endif //F1XX_TEMPLATE_MODULE_W25Q64_H源文件
#include "w25q64/module_w25q64.h"#define DBG_ENABLE
#define DBG_SECTION_NAME "w25q64"
#define DBG_LEVEL DBG_LOG // DBG_LOG DBG_INFO DBG_WARNING DBG_ERROR#include "sys_dbg.h"static W25Q64_cnf_t *cnf_ptr = NULL;
#define SPI_FLASH_CS_LOW cnf_ptr->cs_low
#define SPI_FLASH_CS_HIGH cnf_ptr->cs_high
static volatile uint32_t SPITimeout = SPIT_LONG_TIMEOUT;void W25Q64_cnf_set(W25Q64_cnf_t *cnf) {cnf_ptr = cnf;
}bool W25Q64_Init(void) {if (cnf_ptr == NULL) return false;cnf_ptr->driver_init();/*驱动初始化*/SPI_Flash_WAKEUP();/*唤醒*/SPI_FLASH_ReadDeviceID();if (SPI_FLASH_ReadID() == sFLASH_ID) {return true;}return false;
}/*** @brief 擦除FLASH扇区* @param SectorAddr:要擦除的扇区地址* @retval 无*/
void SPI_FLASH_SectorErase(uint32_t SectorAddr) {/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();SPI_FLASH_WaitForWriteEnd();/* 擦除扇区 *//* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送扇区擦除指令*/SPI_FLASH_SendByte(W25X_SectorErase);/*发送擦除扇区地址的高位*/SPI_FLASH_SendByte((SectorAddr & 0xFF0000) >> 16);/* 发送擦除扇区地址的中位 */SPI_FLASH_SendByte((SectorAddr & 0xFF00) >> 8);/* 发送擦除扇区地址的低位 */SPI_FLASH_SendByte(SectorAddr & 0xFF);/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待擦除完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 擦除FLASH扇区,整片擦除* @param 无* @retval 无*/
void SPI_FLASH_BulkErase(void) {/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();/* 整块 Erase *//* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送整块擦除指令*/SPI_FLASH_SendByte(W25X_ChipErase);/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待擦除完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 对FLASH按页写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer,要写入数据的指针* @param WriteAddr,写入地址* @param NumByteToWrite,写入数据长度,必须小于等于SPI_FLASH_PerWritePageSize* @retval 无*/
void SPI_FLASH_PageWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite) {/* 发送FLASH写使能命令 */SPI_FLASH_WriteEnable();/* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 写页写指令*/SPI_FLASH_SendByte(W25X_PageProgram);/*发送写地址的高位*/SPI_FLASH_SendByte((WriteAddr & 0xFF0000) >> 16);/*发送写地址的中位*/SPI_FLASH_SendByte((WriteAddr & 0xFF00) >> 8);/*发送写地址的低位*/SPI_FLASH_SendByte(WriteAddr & 0xFF);if (NumByteToWrite > SPI_FLASH_PerWritePageSize) {NumByteToWrite = SPI_FLASH_PerWritePageSize;LOG_E("SPI_FLASH_PageWrite too large!");}/* 写入数据*/while (NumByteToWrite--) {/* 发送当前要写入的字节数据 */SPI_FLASH_SendByte(*pBuffer);/* 指向下一字节数据 */pBuffer++;}/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();/* 等待写入完毕*/SPI_FLASH_WaitForWriteEnd();
}/*** @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区* @param pBuffer,要写入数据的指针* @param WriteAddr,写入地址* @param NumByteToWrite,写入数据长度* @retval 无*/
void SPI_FLASH_BufferWrite(uint8_t *pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite) {uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/Addr = WriteAddr % SPI_FLASH_PageSize;/*差count个数据值,刚好可以对齐到页地址*/count = SPI_FLASH_PageSize - Addr;/*计算出要写多少整数页*/NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;/*mod运算求余,计算出剩余不满一页的字节数*/NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;/* Addr=0,则WriteAddr 刚好按页对齐 aligned */if (Addr == 0) {/* NumByteToWrite < SPI_FLASH_PageSize */if (NumOfPage == 0) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);} else /* NumByteToWrite > SPI_FLASH_PageSize */{/*先把整数页都写了*/while (NumOfPage--) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/*若有多余的不满一页的数据,把它写完*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);}}/* 若地址与 SPI_FLASH_PageSize 不对齐 */else {/* NumByteToWrite < SPI_FLASH_PageSize */if (NumOfPage == 0) {/*当前页剩余的count个位置比NumOfSingle小,写不完*/if (NumOfSingle > count) {temp = NumOfSingle - count;/*先写满当前页*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);WriteAddr += count;pBuffer += count;/*再写剩余的数据*/SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);} else /*当前页剩余的count个位置能写完NumOfSingle个数据*/{SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);}} else /* NumByteToWrite > SPI_FLASH_PageSize */{/*地址不对齐多出的count分开处理,不加入这个运算*/NumByteToWrite -= count;NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);WriteAddr += count;pBuffer += count;/*把整数页都写了*/while (NumOfPage--) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);WriteAddr += SPI_FLASH_PageSize;pBuffer += SPI_FLASH_PageSize;}/*若有多余的不满一页的数据,把它写完*/if (NumOfSingle != 0) {SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);}}}
}/*** @brief 读取FLASH数据* @param pBuffer,存储读出数据的指针* @param ReadAddr,读取地址* @param NumByteToRead,读取数据长度* @retval 无*/
void SPI_FLASH_BufferRead(uint8_t *pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead) {/* 选择FLASH: CS低电平 */SPI_FLASH_CS_LOW();/* 发送 读 指令 */SPI_FLASH_SendByte(W25X_ReadData);/* 发送 读 地址高位 */SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);/* 发送 读 地址中位 */SPI_FLASH_SendByte((ReadAddr & 0xFF00) >> 8);/* 发送 读 地址低位 */SPI_FLASH_SendByte(ReadAddr & 0xFF);/* 读取数据 */while (NumByteToRead--) {/* 读取一个字节*/*pBuffer = SPI_FLASH_SendByte(Dummy_Byte);/* 指向下一个字节缓冲区 */pBuffer++;}/* 停止信号 FLASH: CS 高电平 */SPI_FLASH_CS_HIGH();
}/*** @brief 读取FLASH ID* @param 无* @retval FLASH ID*/
uint32_t SPI_FLASH_ReadID(void) {uint32_t Temp = 0, Temp0 = 0, Temp1 = 0, Temp2 = 0;/* 开始通讯:CS低电平 */SPI_FLASH_CS_LOW();/* 发送JEDEC指令,读取ID */SPI_FLASH_SendByte(W25X_JedecDeviceID);/* 读取一个字节数据 */Temp0 = SPI_FLASH_SendByte(Dummy_Byte);/* 读取一个字节数据 */Temp1 = SPI_FLASH_SendByte(Dummy_Byte);/* 读取一个字节数据 */Temp2 = SPI_FLASH_SendByte(Dummy_Byte);/* 停止通讯:CS高电平 */SPI_FLASH_CS_HIGH();/*把数据组合起来,作为函数的返回值*/Temp = (Temp0 << 16) | (Temp1 << 8) | Temp2;return Temp;
}/*** @brief 读取FLASH Device ID* @param 无* @retval FLASH Device ID*/
uint32_t SPI_FLASH_ReadDeviceID(void) {uint32_t Temp = 0;/* Select the FLASH: Chip Select low */SPI_FLASH_CS_LOW();/* Send "RDID " instruction */SPI_FLASH_SendByte(W25X_DeviceID);SPI_FLASH_SendByte(Dummy_Byte);SPI_FLASH_SendByte(Dummy_Byte);SPI_FLASH_SendByte(Dummy_Byte);/* Read a byte from the FLASH */Temp = SPI_FLASH_SendByte(Dummy_Byte);/* Deselect the FLASH: Chip Select high */SPI_FLASH_CS_HIGH();return Temp;
}/*******************************************************************************
* Function Name : SPI_FLASH_StartReadSequence
* Description : Initiates a read data byte (READ) sequence from the Flash.
* This is done by driving the /CS line low to select the device,
* then the READ instruction is transmitted followed by 3 bytes
* address. This function exit and keep the /CS line low, so the
* Flash still being selected. With this technique the whole
* content of the Flash is read with a single READ instruction.
* Input : - ReadAddr : FLASH's internal address to read from.
* Output : None
* Return : None
*******************************************************************************/
void SPI_FLASH_StartReadSequence(uint32_t ReadAddr) {/* Select the FLASH: Chip Select low */SPI_FLASH_CS_LOW();/* Send "Read from Memory " instruction */SPI_FLASH_SendByte(W25X_ReadData);/* Send the 24-bit address of the address to read from -----------------------*//* Send ReadAddr high nibble address byte */SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);/* Send ReadAddr medium nibble address byte */SPI_FLASH_SendByte((ReadAddr & 0xFF00) >> 8);/* Send ReadAddr low nibble address byte */SPI_FLASH_SendByte(ReadAddr & 0xFF);
}/*** @brief 使用SPI读取一个字节的数据* @param 无* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_ReadByte(void) {return (SPI_FLASH_SendByte(Dummy_Byte));
}/*** @brief 使用SPI发送一个字节的数据* @param byte:要发送的数据* @retval 返回接收到的数据*/
uint8_t SPI_FLASH_SendByte(uint8_t byte) {return cnf_ptr->send_and_rec(byte);
// SPITimeout = SPIT_FLAG_TIMEOUT;
//
// /* 等待发送缓冲区为空,TXE事件 */
// while (__HAL_SPI_GET_FLAG(&SpiHandle, SPI_FLAG_TXE) == RESET) {
// if ((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
// }
//
// /* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
// WRITE_REG(SpiHandle.Instance->DR, byte);
//
// SPITimeout = SPIT_FLAG_TIMEOUT;
//
// /* 等待接收缓冲区非空,RXNE事件 */
// while (__HAL_SPI_GET_FLAG(&SpiHandle, SPI_FLAG_RXNE) == RESET) {
// if ((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
// }
//
// /* 读取数据寄存器,获取接收缓冲区数据 */
// return READ_REG(SpiHandle.Instance->DR);
}/*** @brief 向FLASH发送 写使能 命令* @param none* @retval none*/
void SPI_FLASH_WriteEnable(void) {/* 通讯开始:CS低 */SPI_FLASH_CS_LOW();/* 发送写使能命令*/SPI_FLASH_SendByte(W25X_WriteEnable);/*通讯结束:CS高 */SPI_FLASH_CS_HIGH();
}/*** @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕* @param none* @retval none*/
void SPI_FLASH_WaitForWriteEnd(void) {uint8_t FLASH_Status = 0;/* 选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发送 读状态寄存器 命令 */SPI_FLASH_SendByte(W25X_ReadStatusReg);SPITimeout = SPIT_FLAG_TIMEOUT;/* 若FLASH忙碌,则等待 */do {/* 读取FLASH芯片的状态寄存器 */FLASH_Status = SPI_FLASH_SendByte(Dummy_Byte);{if ((SPITimeout--) == 0) {SPI_TIMEOUT_UserCallback(4);return;}}} while ((FLASH_Status & WIP_Flag) == 1); /* 正在写入标志 *//* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH();
}//进入掉电模式
void SPI_Flash_PowerDown(void) {/* 选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发送 掉电 命令 */SPI_FLASH_SendByte(W25X_PowerDown);/* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH();
}//唤醒
void SPI_Flash_WAKEUP(void) {/*选择 FLASH: CS 低 */SPI_FLASH_CS_LOW();/* 发上 上电 命令 */SPI_FLASH_SendByte(W25X_ReleasePowerDown);/* 停止信号 FLASH: CS 高 */SPI_FLASH_CS_HIGH(); //等待TRES1
}/*** @brief 等待超时回调函数* @param None.* @retval None.*/
uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode) {/* 等待超时后的处理,输出错误信息 */LOG_E("%s!errorCode = %d", FILENAME_, errorCode);return 0;
}测试配置
#include "app_conf.h"#define APP_CONF_ENABLE_W25Q64_CNF (1)
#if APP_CONF_ENABLE_W25Q64_CNF#include "w25q64/module_w25q64.h"#define DBG_ENABLE
#define DBG_SECTION_NAME "W25Q64_CNF"
#define DBG_LEVEL DBG_LOG // DBG_LOG DBG_INFO DBG_WARNING DBG_ERROR#include "sys_dbg.h"
#include "stdio.h"#define FLASH_WriteAddress 0x00000
#define FLASH_ReadAddress FLASH_WriteAddress
#define FLASH_SectorToErase FLASH_WriteAddress
/* 获取缓冲区的长度 */
#define countof(a) (sizeof(a) / sizeof(*(a)))
#define BufferSize (countof(Tx_Buffer)-1)uint8_t Tx_Buffer[] = "asdafwer ijfsifhnsow das";
uint8_t Rx_Buffer[BufferSize];
__IO uint32_t FlashID = 0;
/*-********************************************W25Q64_CNF变量定义******************************************-*/
static stm_pin_define_t *w25q64_cs = NULL;
static SPI_HandleTypeDef *w25q64_spi = NULL;
static W25Q64_cnf_t w25q64_cnf;static void w25q64_cs_high(void) { stm32_pin_define_high(w25q64_cs); }static void w25q64_cs_low(void) { stm32_pin_define_low(w25q64_cs); }static void w25q64_driver_init(void);static uint8_t w25q64_send(uint8_t dat);/*-********************************************W25Q64_CNF_pre_init******************************************-*/
static void W25Q64_CNF_pre_init() {w25q64_cs = stm_get_pin(PC0);w25q64_spi = handle_get_by_id(spi1_id);/*这里可以换成自定义spi句柄*/w25q64_cnf.cs_high = w25q64_cs_high;w25q64_cnf.cs_low = w25q64_cs_low;w25q64_cnf.send_and_rec = w25q64_send;w25q64_cnf.driver_init = w25q64_driver_init;W25Q64_cnf_set(&w25q64_cnf);
}sys_pre_init_export(W25Q64_CNF, W25Q64_CNF_pre_init);/*-********************************************W25Q64_CNF_init******************************************-*/
static void W25Q64_CNF_init() {if (W25Q64_Init()) {FlashID = sFLASH_ID;LOG_D("FILE: %s", FILENAME_);}float num = MIN3_(1.3f, 2.3f, 4.3f);LOG_D("MIN %f", num);
}sys_init_export(W25Q64_CNF, W25Q64_CNF_init);/*-***********************************************W25Q64_CNF_after_init***************************************-*/
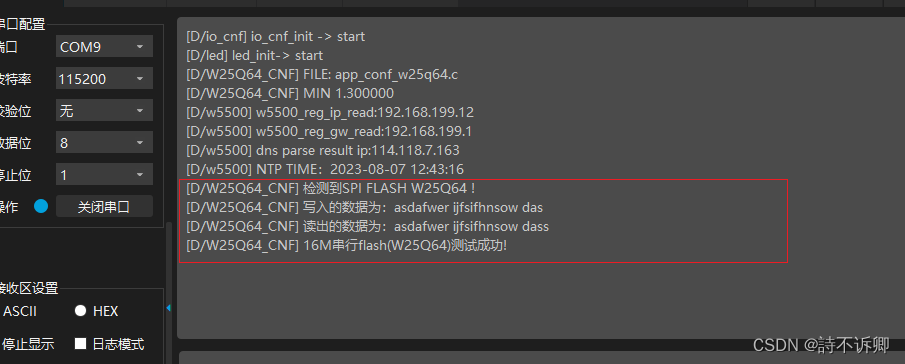
static void W25Q64_CNF_after_init() {/* 获取 Flash Device ID */if (FlashID == sFLASH_ID) {LOG_D("检测到SPI FLASH W25Q64 !");/* 擦除将要写入的 SPI FLASH 扇区,FLASH写入前要先擦除 */SPI_FLASH_SectorErase(FLASH_SectorToErase);/* 将发送缓冲区的数据写到flash中 */SPI_FLASH_BufferWrite(Tx_Buffer, FLASH_WriteAddress, BufferSize);LOG_D("写入的数据为:%s", Tx_Buffer);/* 将刚刚写入的数据读出来放到接收缓冲区中 */SPI_FLASH_BufferRead(Rx_Buffer, FLASH_ReadAddress, BufferSize);LOG_D("读出的数据为:%s", Rx_Buffer);/* 检查写入的数据与读出的数据是否相等 */if (0 == cmp_data(Tx_Buffer, Rx_Buffer, BufferSize)) {LOG_D("16M串行flash(W25Q64)测试成功!");} else {LOG_D("\r\n16M串行flash(W25Q64)测试失败!\n\r");}} else {LOG_D("\r\n获取不到 W25Q64 ID!\n\r");}/*进入掉电模式*/SPI_Flash_PowerDown();
}sys_after_init_export(W25Q64_CNF, W25Q64_CNF_after_init);/*-**************************************W25Q64_CNF内部使用************************************************-*/
static void w25q64_driver_init(void) {/**模式3 CPOL:1,CPHA:1 ; 时钟空闲状态为(高电平),在第二个时钟边沿采数据(时钟上升沿采数据)*/bsp_SpiHandleInit(w25q64_spi, SPI_BAUDRATEPRESCALER_8, spi_mode_3);/*cs 配置*/stm32_pin_define_mode_set(w25q64_cs, pin_mode_output);
}static uint8_t w25q64_send(uint8_t data) {static uint8_t readData = 0;HAL_StatusTypeDef status = HAL_SPI_TransmitReceive(w25q64_spi, &data, &readData, 1, HAL_MAX_DELAY);if (status != HAL_OK) {LOG_E("w25q64_send ERR:%#x", status);return 0;}return readData;
}#endif //APP_CONF_ENABLE_W25Q64_CNF
结果
相关文章:
Clion开发Stm32之存储模块(W25Q64)驱动编写
前言 涵盖之前文章: Clion开发STM32之HAL库SPI封装(基础库) W25Q64驱动 头文件 #ifndef F1XX_TEMPLATE_MODULE_W25Q64_H #define F1XX_TEMPLATE_MODULE_W25Q64_H#include "sys_core.h" /* Private typedef ---------------------------------------------------…...

SpringBoot动态切换数据源
SpringBoot整合多数据源,动态添加新数据源并切换 1.需求2.创建数据源配置类3.切换数据源4.切换数据源管理类5.使用案例5.AOP切面拦截 1.需求 低代码服务需要给多套系统进行功能配置,要求表结构必须生成在对应系统的数据库中,所以表结构的生成…...

[C++项目] Boost文档 站内搜索引擎(4): 搜索的相关接口的实现、线程安全的单例index接口、cppjieba分词库的使用、综合调试...
有关Boost文档搜索引擎的项目的前三篇文章, 已经分别介绍分析了: 项目背景: 🫦[C项目] Boost文档 站内搜索引擎(1): 项目背景介绍、相关技术栈、相关概念介绍…文档解析、处理模块parser的实现: 🫦[C项目] Boost文档 站内搜索引擎(2): 文档文本解析模块…...

SAP ABAP元素域值描述通过函数(DD_DOMVALUE_TEXT_GET)获取
代码如下: PERFORM FRM_GET_DOMVALUE_TEXT USING ZMMD_ZFLZQ <GFS_DATA>-ZFLZQ CHANGING <GFS_DATA>-ZZQTEXT .IF <GFS_DATA>-ZXYLX IS NOT INITIAL .PERFORM FRM_GET_DOMVALUE_TEXT USING ZMMD_ZXYLX <GFS_DATA>-ZXYLX CHANGING <GFS_…...
原型模式与享元模式:提升系统性能的利器
原型模式和享元模式,前者是在创建多个实例时,对创建过程的性能进行调优;后者是用减 少创建实例的方式,来调优系统性能。这么看,你会不会觉得两个模式有点相互矛盾呢? 在有些场景下,我们需要重复…...

uniapp封装手写签名
组件代码 cat-signature <template><view v-if"visibleSync" class"cat-signature" :class"{visible:show}" touchmove.stop.prevent"moveHandle"><view class"mask" tap"close" /><view c…...
掌握 JVM 调优命令
常用命令 1、jps查看当前 java 进程2、jinfo实时查看和调整 JVM 配置参数3、jstat查看虚拟机统计信息4、jstack查看线程堆栈信息5、jmap查看堆内存的快照信息 JVM 日常调优总结起来就是:首先通过 jps 命令查看当前进程,然后根据 pid 通过 jinfo 命令查看…...
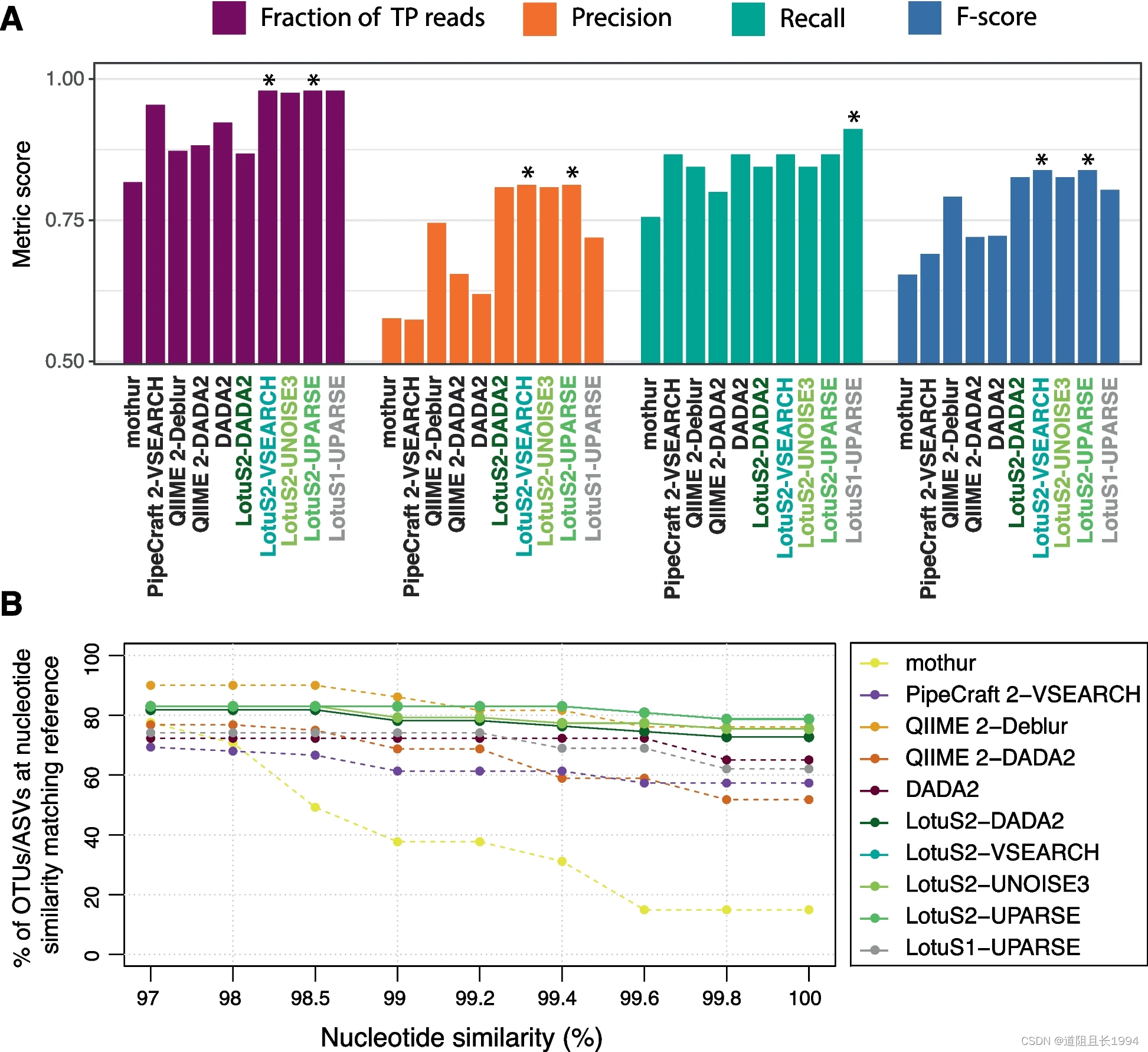
扩增子分析流程——Lotus2: 一行命令完成所有分析
为什么介绍lotus2 因为快,作者比较了lotus2流程和qiime2、dada2、vsearch等,lotus2的速度最快、占用内存最小。 因为方便,只需要一行代码,即可完成全部分析。 lotus2 -i Example/ -m Example/miSeqMap.sm.txt -o myTestRun而且分…...

微服务 云原生:搭建 Harbor 私有镜像仓库
Harbor官网 写在文前: 本文中用到机器均为虚拟机 CentOS-7-x86_64-Minimal-2009 镜像。 基础设施要求 虚拟机配置达到最低要求即可,本次系统中使用 docker 24.0.4、docker-compose 1.29.2。docker 及 docker-compose 的安装可以参考上篇文章 微服务 &am…...

Ceph入门到精通-远程开发Windows下使用SSH密钥实现免密登陆Linux服务器
工具: win10、WinSCP 服务器生成ssh密钥: 打开终端,使账号密码登录,输入命令 ssh-keygen -t rsa Winscp下载 Downloading WinSCP-6.1.1-Setup.exe :: WinSCP window 生成密钥 打开powershell ssh-keygen -t rsa 注意路径 …...
APP外包开发的开发语言对比
在开发iOS APP时有两种语言可以选择,Swift(Swift Programming Language)和 Objective-C(Objective-C Programming Language),它们是两种不同的编程语言,都被用于iOS和macOS等苹果平台的软件开发…...
基于Python++PyQt5马尔科夫模型的智能AI即兴作曲—深度学习算法应用(含全部工程源码+测试数据)
目录 前言总体设计系统整体结构图系统流程图 运行环境Python 环境PC环境配置 模块实现1. 钢琴伴奏制作1)和弦的实现2)和弦级数转为当前调式音阶3)根据预置节奏生成伴奏 2. 乐句生成1)添加音符2)旋律生成3)节…...
Android中简单封装Livedata工具类
Android中简单封装Livedata工具类 前言: 之前讲解过livedata和viewmodel的简单使用,也封装过room工具类,本文是对livedata的简单封装和使用,先是封装了一个简单的工具类,然后实现了一个倒计时工具类的封装. 1.LiveD…...
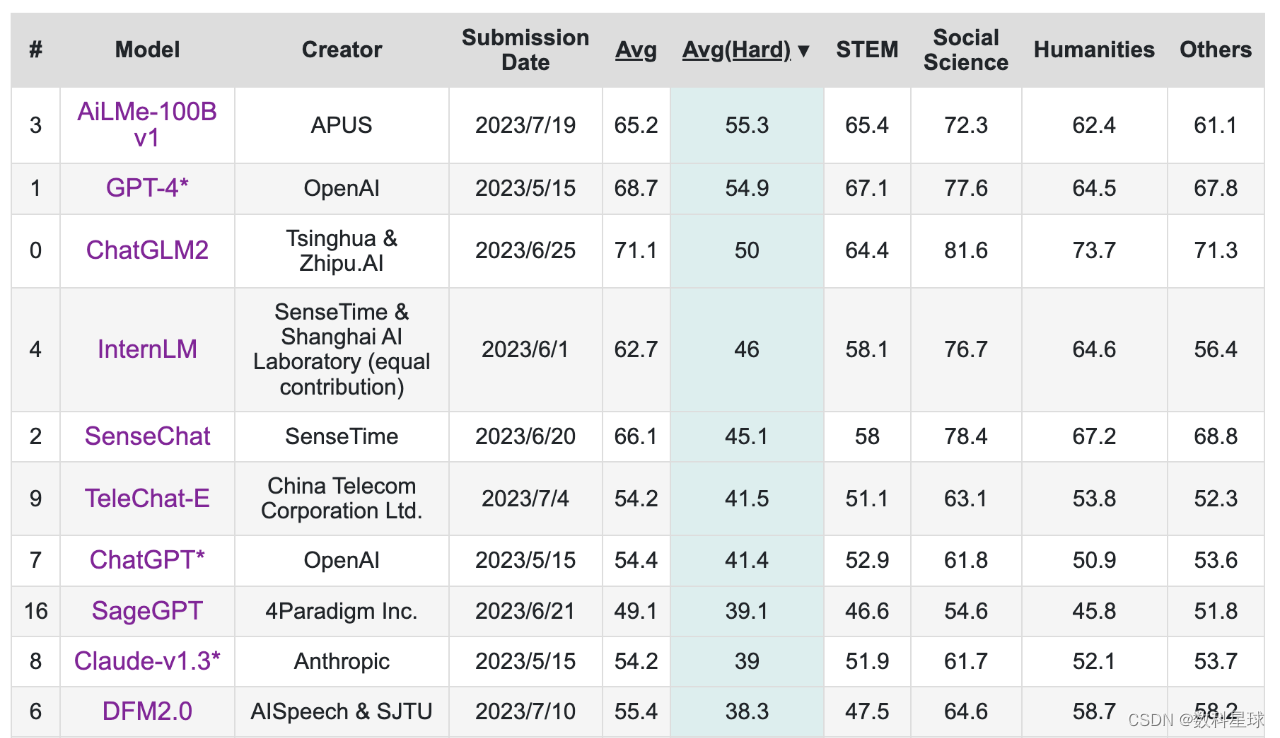
国内大模型在局部能力上已超ChatGPT
中文大模型正在后来居上,也必须后来居上。 数科星球原创 作者丨苑晶 编辑丨大兔 从GPT3.5彻底出圈后,大模型的影响力开始蜚声国际。一段时间内,国内科技公司可谓被ChatGPT按在地上打,毫无还手之力。 彼时,很多企业…...

监控设置ip地址怎么设置
监控设备的IP地址设置是保障监控系统正常工作的基础。通过设置IP地址,我们可以确定监控设备在局域网内的位置,并远程访问监控设备进行实时查看、存储视频等操作。下面虎观代理小二二将介绍具体步骤。 方法一: 和电脑连接在一起,…...
)
力扣:56. 合并区间(Python3)
题目: 以数组 intervals 表示若干个区间的集合,其中单个区间为 intervals[i] [starti, endi] 。请你合并所有重叠的区间,并返回 一个不重叠的区间数组,该数组需恰好覆盖输入中的所有区间 。 来源:力扣(Lee…...

最小二乘问题和非线性优化
最小二乘问题和非线性优化 0.引言1.最小二乘问题2.迭代下降法3.最速下降法4.牛顿法5.阻尼法6.高斯牛顿(GN)法7.莱文贝格马夸特(LM)法8.鲁棒核函数 0.引言 转载自此处,修正了一点小错误。 1.最小二乘问题 在求解 SLAM 中的最优状态估计问题时,我们一般…...

Selenium/webdriver原理解析
最近在看一些底层的东西。driver翻译过来是驱动,司机的意思。如果将webdriver比做成司机,竟然非常恰当。 我们可以把WebDriver驱动浏览器类比成出租车司机开出租车。在开出租车时有三个角色: 乘客:他/她告诉出租车司机去哪里&…...
多用户跨境B2B2C商城后台管理系统快速搭建
搭建一个多用户跨境B2B2C商城后台管理系统需要考虑多个方面,包括系统架构设计、用户权限管理、商品管理、订单管理、支付管理、物流管理等。搭建步骤如下: 1. 系统架构设计 首先,需要设计一个稳定可靠的系统架构。选择一个适合B2B2C商城的商…...

MySQL 优化
问题描述 MySQL 的性能优化分为四个部分: 硬件和操作系统层面的优化架构设计层面的优化MySQL 程序配置优SQL 优化 一、硬件及操作系统层面优化 从硬件层面来说,影响 Mysql 性能的因素有,CPU、可用内存大小、磁盘读写速度、 网络带宽。 从操作…...

学校AIGC检测标准差异解读:不同高校AI率标准对比2026年如何针对性免费处理完整指南
学校AIGC检测标准差异解读:不同高校AI率标准对比2026年如何针对性免费处理完整指南 同一段文字,不同平台检测AI率相差20%以上。这不是玄学,有原因可解释。 关于高校AIGC检测标准差异解读,理解了背后逻辑,很多「奇怪现…...
在SI仿真中的正确建模姿势)
从“白点”到模型:用通俗语言拆解玻纤布(如1078)在SI仿真中的正确建模姿势
从“白点”到模型:信号完整性仿真中的玻纤布建模实战指南 在高速PCB设计领域,信号完整性(SI)工程师常常需要面对一个看似微小却影响深远的问题:那些在显微镜下呈现为"白点"的玻璃纤维束,究竟应该…...

GraphQL-WS vs 传统GraphQL:为什么WebSocket是实时应用的首选
GraphQL-WS vs 传统GraphQL:为什么WebSocket是实时应用的首选 【免费下载链接】graphql-ws Coherent, zero-dependency, lazy, simple, GraphQL over WebSocket Protocol compliant server and client. 项目地址: https://gitcode.com/gh_mirrors/gr/graphql-ws …...

如何在Windows 11上完美运行经典游戏:DDrawCompat终极兼容性解决方案
如何在Windows 11上完美运行经典游戏:DDrawCompat终极兼容性解决方案 【免费下载链接】DDrawCompat DirectDraw and Direct3D 1-7 compatibility, performance and visual enhancements for Windows Vista, 7, 8, 10 and 11 项目地址: https://gitcode.com/gh_mir…...

基于大语言模型的智能购物助手:从架构设计到工程实现
1. 项目概述:当AI遇上电商,一个“懂你”的购物助手如何炼成最近在逛GitHub的时候,发现了一个挺有意思的项目,叫“KudoAI/amazongpt”。光看名字,你大概能猜到它和亚马逊(Amazon)以及GPT有关。没…...

深度解析AI模型Docker镜像:从DeepSeek部署到生产级容器化实践
1. 项目概述:一个AI模型镜像的深度解构最近在社区里看到不少朋友在讨论dirk1983/deepseek这个Docker镜像,作为一个长期在AI工程化和容器化部署一线摸爬滚打的从业者,我觉得有必要来聊聊这个看似简单的镜像背后,究竟藏着哪些门道。…...
)
告别裸机延时!ESP32-C3/ESP32-S3用RMT外设精准驱动WS2812B灯带(Arduino/IDF双平台教程)
ESP32-C3/ESP32-S3 RMT外设驱动WS2812B灯带实战指南 当你的灯光项目从十几颗WS2812B升级到上百颗时,GPIO模拟驱动方式很快就会遇到瓶颈——闪烁、卡顿、颜色失真,这些问题的根源在于时序精度不足。ESP32系列芯片内置的RMT(Remote Control&…...

终极指南:如何用UniversalSplitScreen在一台电脑上玩多人游戏
终极指南:如何用UniversalSplitScreen在一台电脑上玩多人游戏 【免费下载链接】UniversalSplitScreen Split screen multiplayer for any game with multiple keyboards, mice and controllers. 项目地址: https://gitcode.com/gh_mirrors/un/UniversalSplitScree…...
)
UWB定位标签天线怎么选?PATCH、PIFA、DIPOLE三种方案全对比(含NXP/Qorvo模组适配建议)
UWB定位标签天线选型指南:PATCH、PIFA、DIPOLE三大方案深度解析与工程决策 在物联网定位技术领域,超宽带(UWB)凭借其厘米级精度和强抗干扰能力,已成为工业定位、智能仓储和医疗设备追踪的核心解决方案。而天线作为UWB系统的"感官器官&qu…...

基于smartcat的智能文件自动分类与归档系统实践
1. 项目概述:一个智能化的文件分类与归档工具最近在整理个人电脑和服务器上的文件时,我又一次陷入了混乱。下载文件夹里混杂着PDF、图片、代码压缩包、安装程序;项目文档和历史备份散落在各处。手动分类不仅耗时,而且容易出错。我…...