踩坑 视觉SLAM 十四讲第二版 ch13 编译及运行问题
一、安装Geset 库
sudo apt-get install libgtest-dev
cd /usr/src/gtest
sudo mkdir build
cd build
sudo cmake .. //一定要以sudo的方式运行,否则没有写入权限
sudo make //这个也一样要以sudo的方式
sudo cp libgtest*.a /usr/local/lib //将生成的libgtest.a 和 libgtest_main.a 拷贝到系统的lib路径下
二、修改fmt
在所有 CmakeList文件中后面添加 fmt,需要修改的有以下几处:
/app下的:
add_executable(run_kitti_stereo run_kitti_stereo.cpp)
target_link_libraries(run_kitti_stereo myslam ${THIRD_PARTY_LIBS} fmt ) /src下的:这里还需要将SHARE改为STATIC:
add_library(myslam STATICframe.cppmappoint.cppmap.cppcamera.cppconfig.cppfeature.cppfrontend.cppbackend.cppviewer.cppvisual_odometry.cppdataset.cpp)target_link_libraries(myslam${THIRD_PARTY_LIBS} fmt )
/test下的:
SET(TEST_SOURCES test_triangulation)FOREACH (test_src ${TEST_SOURCES})ADD_EXECUTABLE(${test_src} ${test_src}.cpp)TARGET_LINK_LIBRARIES(${test_src} ${THIRD_PARTY_LIBS} myslam fmt )ADD_TEST(${test_src} ${test_src})
ENDFOREACH (test_src)
三、修改kitti_stereo.cpp
需要将 assert(vo->Init() == true这行注释,并改为vo->Init()
myslam::VisualOdometry::Ptr vo(new myslam::VisualOdometry(FLAGS_config_file));// assert(vo->Init() == true);vo->Init();vo->Run();四、下载数据集
给大家分享一下百度网盘:kitti 提取码:2p1k
(整体文件很大,约22G,可以先下载一个00序列)
五、修改/config下的default.yaml中的数据集的路径
%YAML:1.0
# data
# the tum dataset directory, change it to yours!
# dataset_dir: /media/xiang/Data/Dataset/Kitti/dataset/sequences/00
//下面是需要你根据自己的路径修改:
dataset_dir: /media/tzy/TZY-YP/VSLAM/Dataset/KITTI/data_odometry_gray/dataset/sequences/00# camera intrinsics
camera.fx: 517.3
camera.fy: 516.5
camera.cx: 325.1
camera.cy: 249.7num_features: 150
num_features_init: 50
num_features_tracking: 50六、编译运行
cd ch13
mkdir build
cd build
cmake ..
make测试:
cd bin
./test_triangulation
运行:
注意不要在/bin 路径下执行,需要在/ch13下运行
回到上一级目录:
cd ..
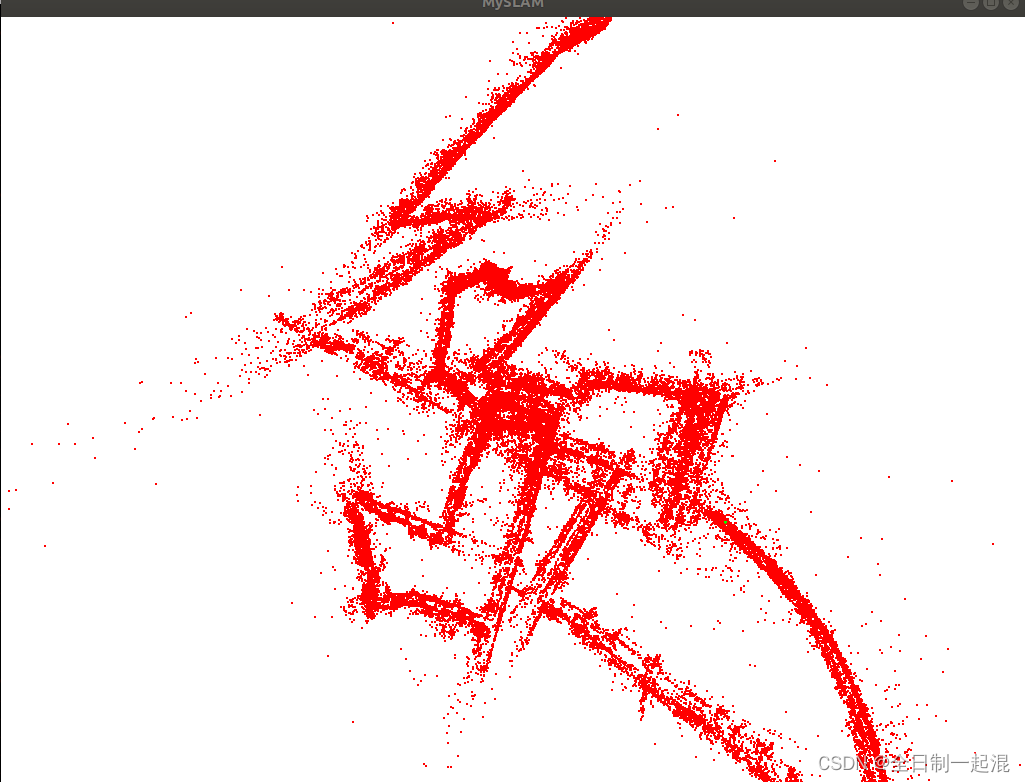
./bin/run_kitti_stereo运行效果:
七、如果需要显示全部地图轨迹
修改viewer.cpp中UpdateMap()函数:
void Viewer::UpdateMap() {std::unique_lock<std::mutex> lck(viewer_data_mutex_);assert(map_ != nullptr);active_keyframes_ = map_->GetActiveKeyFrames();//active_landmarks_ = map_->GetActiveMapPoints();active_landmarks_ = map_->GetAllMapPoints(); // 改为all mappoints,显示整体地图map_updated_ = true;
}重新编译运行,效果如图,可以看出轨迹和地图错位严重,并且01序列直接跟踪失败
相关文章:
踩坑 视觉SLAM 十四讲第二版 ch13 编译及运行问题
一、安装Geset 库 sudo apt-get install libgtest-dev cd /usr/src/gtest sudo mkdir build cd build sudo cmake .. //一定要以sudo的方式运行,否则没有写入权限 sudo make //这个也一样要以sudo的方式 sudo cp libgtest*.a /usr/local/lib //将生成…...

【设计模式】-装饰器模式
Java 设计模式之装饰器模式 前言 在软件开发中,经常有需求对已有的对象进行功能的扩展,但是传统的继承方式会导致类的数量快速增多,且难以维护。为了解决这个问题,装饰器模式应运而生。 装饰器模式是一种结构型设计模式ÿ…...
七月学习总结
一晃暑期七月份已经结束了,八月份需要做的事情更多。 在成长的路上不断地迷茫,不断地前进。到底才能完成对自己地救赎。 目前想的就是以后走软件开发,往架构方向做,主语言Java或者go,408基础一定要扎实,计…...

Camunda 7.x 系列【6】Spring Boot 集成 Camunda 7.19
有道无术,术尚可求,有术无道,止于术。 本系列Spring Boot 版本 2.7.9 本系列Camunda 版本 7.19.0 源码地址:https://gitee.com/pearl-organization/camunda-study-demo 文章目录 1. 前言2. Camunda Platform Run3. Spring Boot 版本兼容性4. 集成 Spring Boot5. 启动项目…...

Kubernetes —调度器配置
目录 配置文件 扩展点 调度插件 多配置文件 应用于多个扩展点的插件 调度程序配置迁移 你可以通过编写配置文件,并将其路径传给 kube-scheduler 的命令行参数,定制 kube-scheduler 的行为。 调度模板(Profile)允许你配置 k…...

【微信小程序】申请蓝牙、位置和数据库等相关权限
在小程序的app.json文件中配置requiredPermissions字段,并在其中添加相应的权限。 以下是一个示例app.json文件的配置,包括了蓝牙、位置和数据库等权限的申请: {"pages": ["pages/index/index"],"requiredPermiss…...
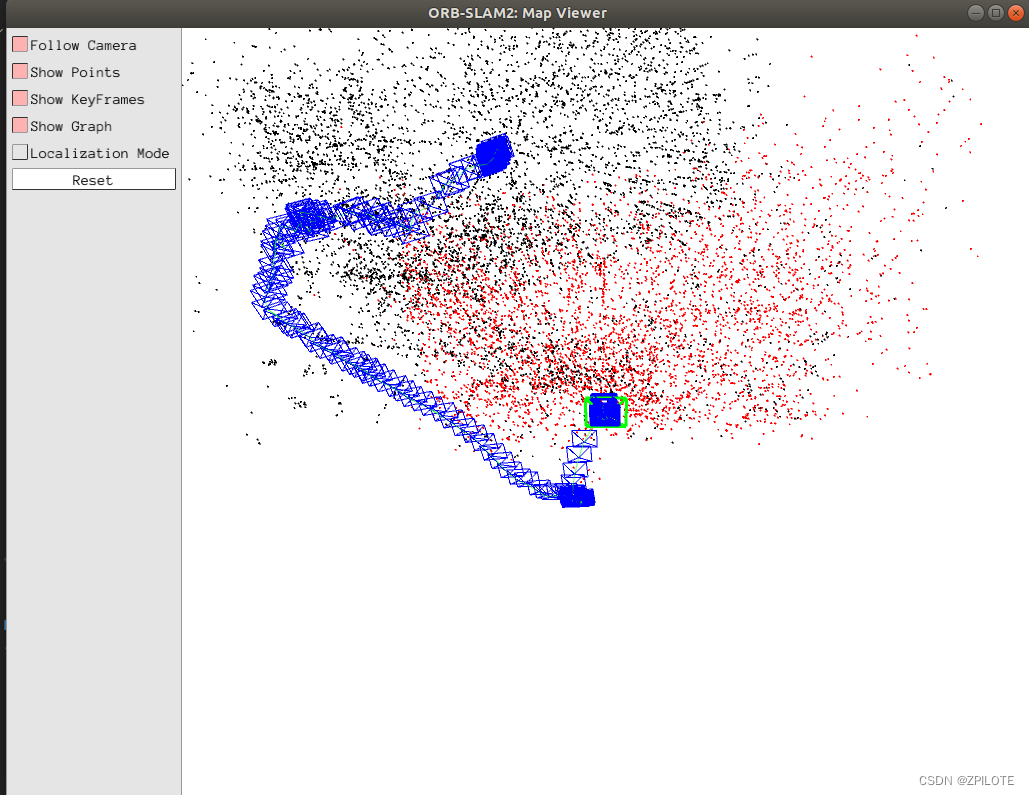
ORB-SLAM2学习笔记6之D435i双目IR相机运行ROS版ORB-SLAM2并发布位姿pose的rostopic
文章目录 0 引言1 D435i相机配置2 新增发布双目位姿功能2.1 新增d435i_stereo.cc代码2.2 修改CMakeLists.txt2.3 新增配置文件D435i.yaml 3 编译运行和结果3.1 编译运行3.2 结果3.3 可能出现的问题 0 引言 ORB-SLAM2学习笔记1已成功编译安装ROS版本ORB-SLAM2到本地,…...
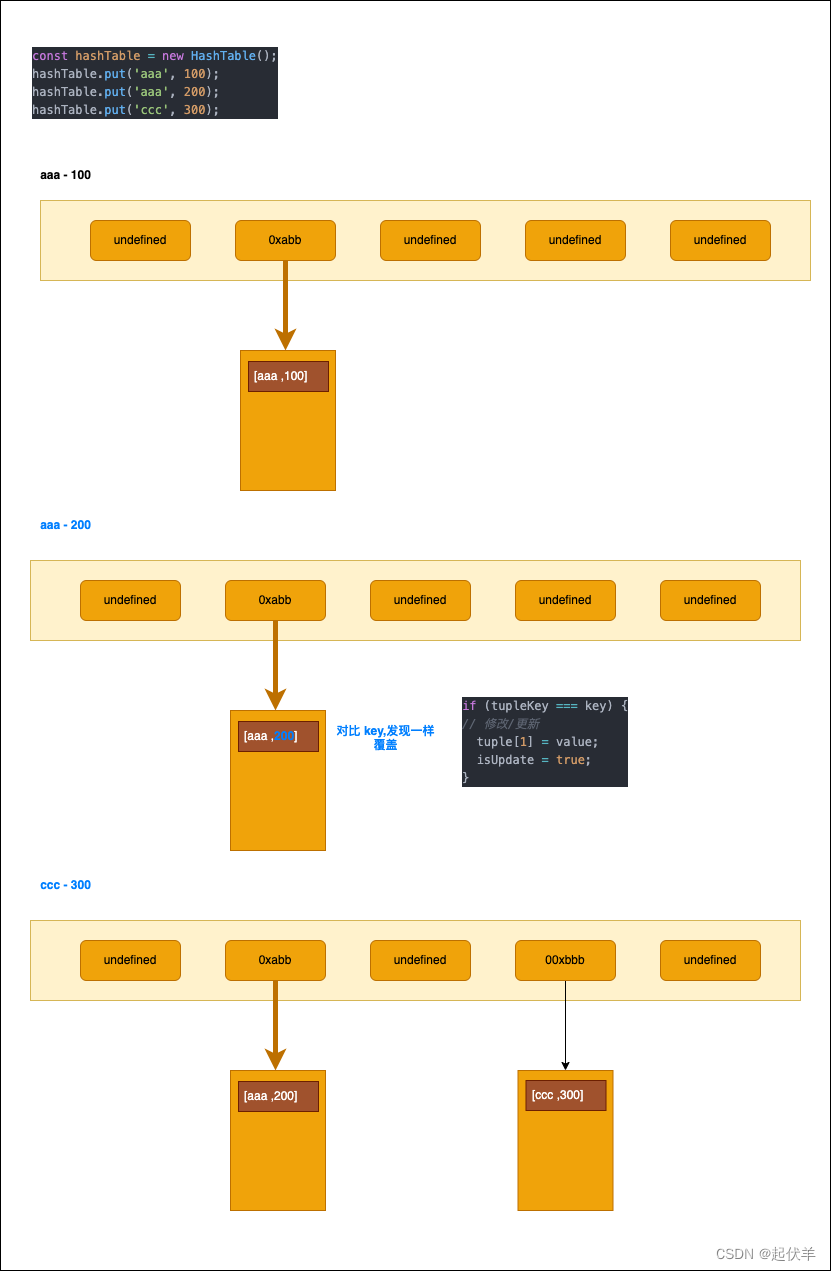
【数据结构与算法——TypeScript】哈希表
【数据结构与算法——TypeScript】 哈希表(HashTable) 哈希表介绍和特性 哈希表是一种非常重要的数据结构,但是很多学习编程的人一直搞不懂哈希表到底是如何实现的。 在这一章节中,我门就一点点来实现一个自己的哈希表。通过实现来理解哈希表背后的原理…...

JavaScript 中常用简写语法技巧总结
分享一些自己常用的js简写技巧,长期更新,会着重挑选一些实用的简写技巧,使自己的代码更简洁优雅~ 这里只会收集一些大多数人不知道的用法,但是确实能提高自己的编码技巧,像ES6那些基础的简写语法或者是三目运算符代替i…...

漫画算法做题笔记
诸神缄默不语-个人CSDN博文目录 哦这是我三年前写的,我现在Java语法都快忘光了…… 反正之前的博文也发一下好了。这个因为我当年是用有道云笔记而不是直接用CSDN编辑器写的,所以后面有些内容写乱了,因为我现在猛的一看有点看不懂࿰…...

JDBC学习笔记
1 JDBC简介 1.1 前言 当谈论JDBC时,我们可以将其看作是一种用于Java程序与数据库进行通信的方式。如果你想编写一个Java程序,并且希望能够连接到数据 库、执行查询或更新数据,JDBC就是你需要的工具。 JDBC提供了一组类和接口,…...
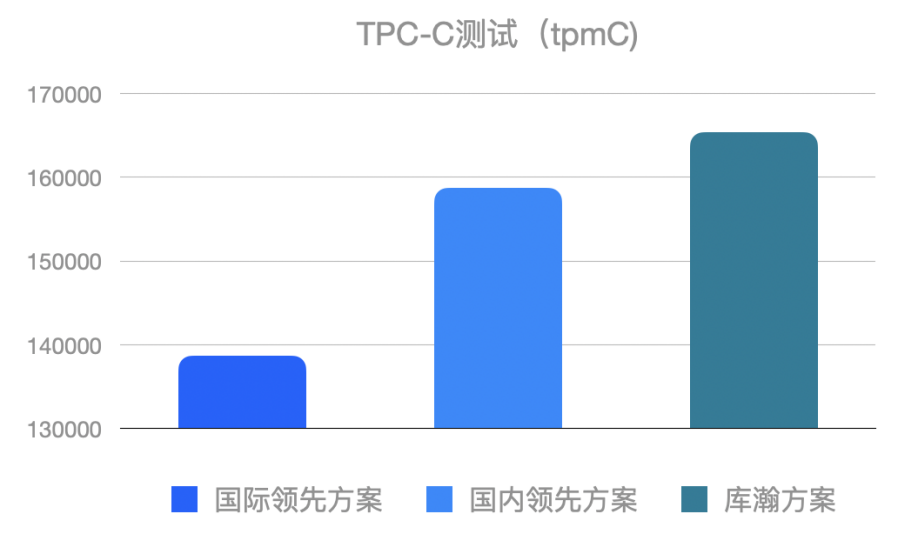
亚信科技AntDB数据库与库瀚存储方案完成兼容性互认证,联合方案带来约20%性能提升
近日,亚信科技AntDB数据库与苏州库瀚信息科技有限公司自主研发的RISC-V数据库存储解决方案进行了产品兼容测试。经过双方团队的严格测试,亚信科技AntDB数据库与库瀚数据库存储解决方案完全兼容、运行稳定。除高可用性测试外,双方进一步开展TP…...
【MySQL】基础知识(一)
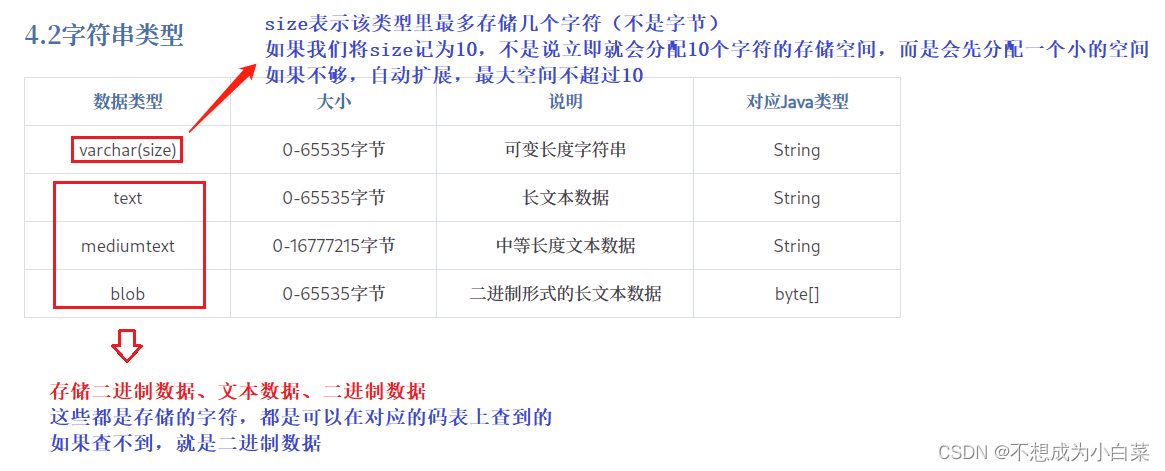
MySQL基础知识(一) 文章目录 MySQL基础知识(一)00 MySQL安装01 数据库介绍1.1 什么是数据库1.2数据库分类 02 SQL分类03 数据库操作3.1显示数据库3.2创建数据库3.3选中数据库3.4删除数据库 04 常用数据类型4.1数值类型4.2字符串类…...

Ansible专栏目录
我的博客:www.itwk.cc 希望能够给大家带来帮助! 1、什么是Ansible?Ansible 简介及核心概念详解 https://blog.csdn.net/qq_34185638/article/details/131079320 2、Ansible Inventory 主机清单的作用、使用方法及示例详解 https://blog.cs…...

【locust】使用locust + boomer实现对接口的压测
目录 背景 环境安装 脚本编写 master slave节点(golang/boomer) 问题 资料获取方法 背景 很早之前,考虑单机执行能力,使用locust做过公司短信网关的压测工作,后来发现了一个golang版本的locust,性能…...
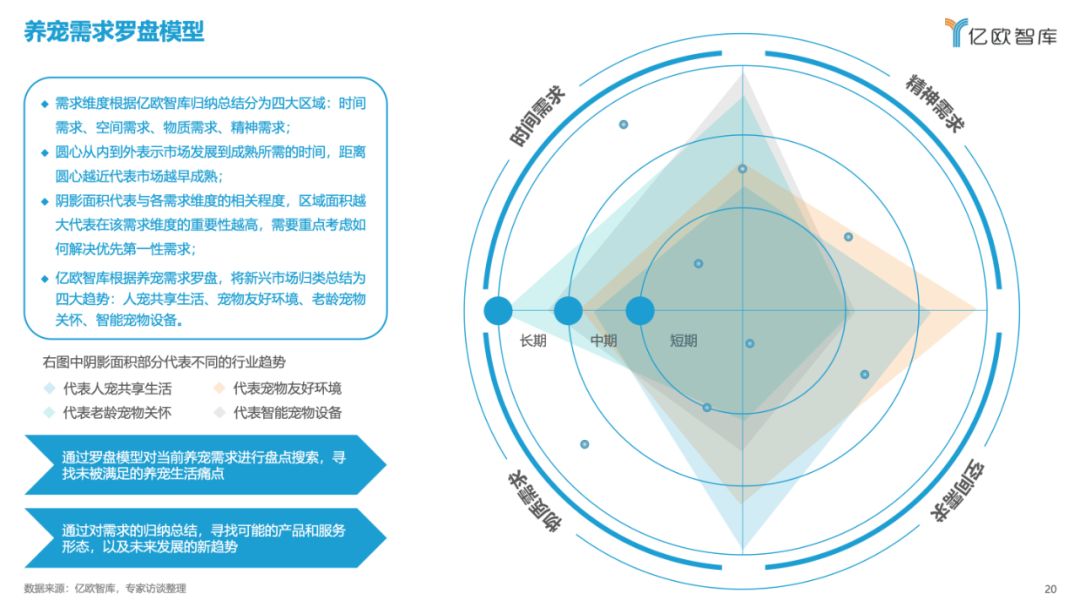
亿欧智库:2023中国宠物行业新趋势洞察报告(附下载)
关于报告的所有内容,公众【营销人星球】获取下载查看 核心观点 户外赛道本质上迎合了全球共性需求的增长,从养宠意愿的转化到养宠生活的需求,多层次的需求推动行业发展新趋势 从需求端进行分析,可以将养宠意愿的转化分为三个层…...
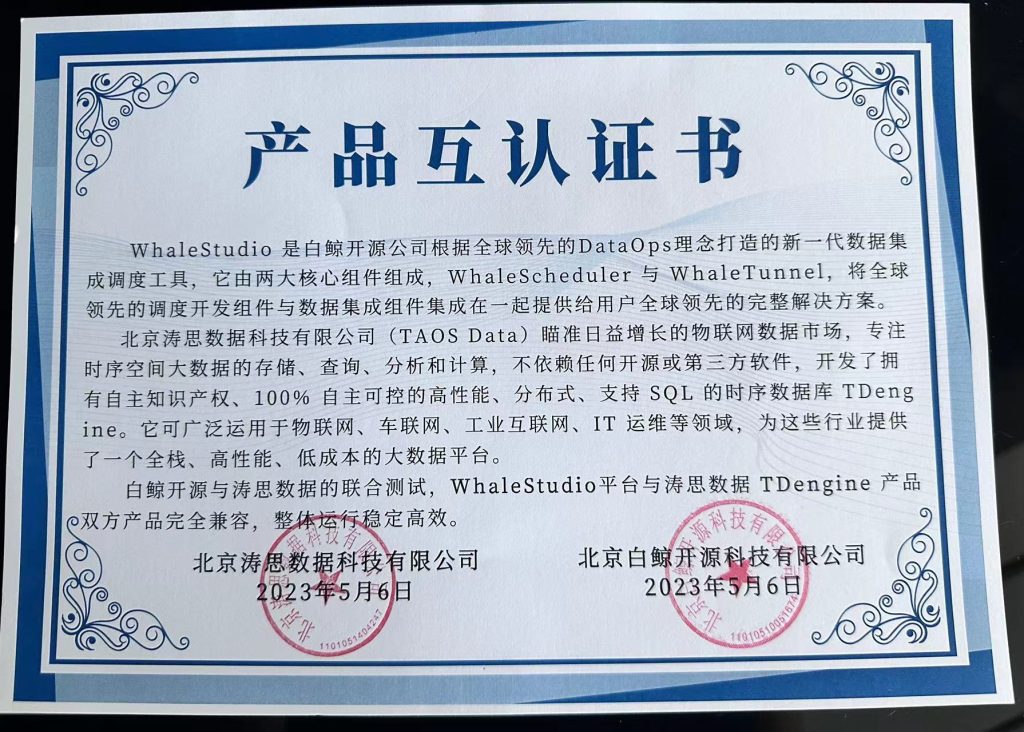
时序数据库 TDengine 与 WhaleStudio 完成相互兼容性测试认证
近年来,开源及其价值获得社会各界的广泛认可,无论是国家政策导向还是企业数字化转型,都在加速拥抱开源。对于如操作系统、数据库等基础软件来说,开源更是成为驱动技术创新的有力途径。 在此背景下,近日,涛…...
Spring-1-深入理解Spring XML中的依赖注入(DI):简化Java应用程序开发
学习目标 前两篇文章我们介绍了什么是Spring,以及Spring的一些核心概念,并且快速快发一个Spring项目,以及详细讲解IOC,今天详细介绍一些DI(依赖注入) 能够配置setter方式注入属性值 能够配置构造方式注入属性值 能够理解什么是自动装配 一、…...

负载均衡–HAProxy安装及搭建tidb数据库负载服务
作为一名开发人员,随着经验的增加和技术的沉淀,需要提高自己架构方面的知识,同时对于一个企业来说,搭建一套高可用、高性能的技术架构,对于公司的业务开展和提高服务的性能也是大有裨益的。本文重点从软件安装和搭建ti…...

Django各种缓存的配置
Django提供了多种缓存后端,如内存缓存、文件缓存、数据库缓存、Memcached和Redis等。根据项目需求选择合适的缓存后端。 settings配置 在Django项目的settings.py文件中,找到或新增CACHES配置项。根据所选的缓存后端,配置相应的参数。以下是…...
)
Lovable前端不是UI美化,而是工程决策——看头部电商如何用2周将NPS提升37%(含埋点与归因模型)
更多请点击: https://kaifayun.com 第一章:Lovable前端开发实战案例 在现代前端工程中,“Lovable”不仅指界面美观、交互愉悦,更强调可维护性、可测试性与开发者体验的统一。本章通过一个轻量级待办事项(Todo…...

ARMv8/v9虚拟化核心:SCTLR_EL2寄存器详解与配置实践
1. AArch64 SCTLR_EL2系统寄存器深度解析在ARMv8/v9架构的异常级别(Exception Level)设计中,EL2作为虚拟化管理的核心层级,其系统控制寄存器SCTLR_EL2承载着关键的系统配置功能。这个64位寄存器不仅控制着EL2自身的内存管理和系统…...

技术人如何找到自己的“甜蜜点”?一个四象限模型帮你定位
在软件测试这条“越走越深”的路上,每个从业者早晚都会撞上一堵墙——技能焦虑。自动化框架层出不穷,性能工具日新月异,安全左移、精准测试、AI 辅助……每一样看起来都很重要,每一样又都学不完。于是有人拼命考证,有人…...

5分钟搞定Windows桌面整理:免费开源的NoFences终极指南
5分钟搞定Windows桌面整理:免费开源的NoFences终极指南 【免费下载链接】NoFences 🚧 Open Source Stardock Fences alternative 项目地址: https://gitcode.com/gh_mirrors/no/NoFences 还在为杂乱的Windows桌面图标而烦恼吗?每次寻找…...

Godot纸牌游戏框架:分层架构与卡牌状态管理
1. 这不是又一个“通用游戏框架”,而是一套专为纸牌游戏设计的骨骼系统你有没有试过在Godot里从零搭一张卡牌游戏?我试过三次——第一次用Node2D硬堆,拖了二十多个场景,连抽卡动画都得手写Tween;第二次改用Resource做卡…...

免ROOT使用Frida:Android合规调试的底层原理与四条落地路径
1. 这不是“越狱式”调试,而是一条被低估的合规路径 很多人一听到 Frida,第一反应就是“得先 root 手机”“得 patch apk”“得重打包签名”——仿佛不撬开系统大门,就进不了应用内存。我最初也这么想,直到在某次金融类 App 的灰…...
部署步骤 小白避坑手册)
2026 最新 OpenClaw(小龙虾)部署步骤 小白避坑手册
OpenClaw(小龙虾)Windows 一键部署保姆级教程 | 10 分钟养出你的数字员工(2026 最新版) ✨ 前言 2026 年爆火的开源 AI 智能体 OpenClaw(昵称小龙虾),GitHub 星标超 28 万,凭 “本…...
)
2026年主流AI论文写作软件全攻略(含保姆级操作教程)
以下是当前学术圈口碑TOP的6款AI写论文工具,覆盖从选题、开题到降重、答辩的论文全流程,剔除冗余工具,每款均附分步骤实操指南场景适配技巧,重点突出中文论文适配性,新手也能快速上手,效率翻倍。一、全流程…...

3步轻松上手:用Stressful Application Test发现系统隐藏问题的终极指南
3步轻松上手:用Stressful Application Test发现系统隐藏问题的终极指南 【免费下载链接】stressapptest Stressful Application Test - userspace memory and IO test 项目地址: https://gitcode.com/gh_mirrors/st/stressapptest Stressful Application Tes…...

MulimgViewer终极指南:如何用一个界面管理多张图片,告别繁琐切换
MulimgViewer终极指南:如何用一个界面管理多张图片,告别繁琐切换 【免费下载链接】MulimgViewer MulimgViewer is a multi-image viewer that can open multiple images in one interface, which is convenient for image comparison and image stitchin…...