无人车沿着指定线路自动驾驶与远程控制的实践应用
有了前面颜色识别跟踪的基础之后,我们就可以设定颜色路径,让无人车沿着指定线路做自动驾驶了,视频:PID控制无人车自动驾驶
有了前几章的知识铺垫,就比较简单了,也是属于颜色识别的一种应用,主要是掌握自动驾驶中的一些基础知识,这样就可以进一步去了解在无人驾驶当中遇到的各种问题
1、导入库并初始化
from jetbotmini import Camera
from jetbotmini import bgr8_to_jpeg
from IPython.display import display
from jetbotmini import Robot
import numpy as np
import torch
import torchvision
import cv2
import traitlets
import ipywidgets.widgets as widgets
import numpy as np#初始化摄像头
camera = Camera.instance(width=300, height=300)
#初始化机器人马达
robot = Robot()#使用PID控制
import PIDturn_gain = 1.7
turn_gain_pid = PID.PositionalPID(0.15, 0, 0.05)这部分很简单,依然是初始化摄像头用来颜色识别,机器人也叫马达,用来驱动轮子的运动,加一个PID控制,让无人车更加的平稳。
2、显示部件
# 红色数组
color_lower=np.array([156,43,46])
color_upper = np.array([180, 255, 255])image_widget = widgets.Image(format='jpeg', width=300, height=300)
speed_widget = widgets.FloatSlider(value=0.4, min=0.0, max=1.0, description='speed')display(widgets.VBox([widgets.HBox([image_widget]),speed_widget,
]))width = int(image_widget.width)
height = int(image_widget.height)def execute(change):global turn_gaintarget_value_speed = 0#更新图片值frame = camera.valueframe = cv2.resize(frame, (300, 300))frame = cv2.GaussianBlur(frame,(5,5),0) hsv =cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)mask=cv2.inRange(hsv,color_lower,color_upper) mask=cv2.erode(mask,None,iterations=2)mask=cv2.dilate(mask,None,iterations=2)mask=cv2.GaussianBlur(mask,(3,3),0) cnts=cv2.findContours(mask.copy(),cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)[-2] # 检测到目标if len(cnts)>0:cnt = max (cnts,key=cv2.contourArea)(color_x,color_y),color_radius=cv2.minEnclosingCircle(cnt)if color_radius > 10:# 将检测到的颜色标记出来cv2.circle(frame,(int(color_x),int(color_y)),int(color_radius),(255,0,255),2) # 中心偏移量center = (150 - color_x)/150#转向增益PID调节turn_gain_pid.SystemOutput = centerturn_gain_pid.SetStepSignal(0)turn_gain_pid.SetInertiaTime(0.2, 0.1)#将转向增益限制在有效范围内target_value_turn_gain = 0.15 + abs(turn_gain_pid.SystemOutput)if target_value_turn_gain < 0:target_value_turn_gain = 0elif target_value_turn_gain > 2:target_value_turn_gain = 2#将输出电机速度保持在有效行驶范围内target_value_speedl = speed_widget.value - target_value_turn_gain * centertarget_value_speedr = speed_widget.value + target_value_turn_gain * centerif target_value_speedl<0.3:target_value_speedl=0elif target_value_speedl>1:target_value_speedl = 1if target_value_speedr<0.3:target_value_speedr=0elif target_value_speedr>1:target_value_speedr = 1#设置马达速度robot.set_motors(target_value_speedl, target_value_speedr)# 没有检测到目标else:robot.stop()# 更新图像显示至小部件image_widget.value = bgr8_to_jpeg(frame)
这里是关键部分,检测目标(这里是红颜色),然后通过其检测的位置来控制左右马达的速度,驱动无人车的行驶与转弯,后台通过图像部件来显示无人车的跟踪情况,方便看到无人车在整个行驶过程中的各种状态。
3、调用并执行
execute({'new': camera.value})
camera.unobserve_all()
camera.observe(execute, names='value')这里就是前面介绍的,通过调用observer方法来更新摄像头的数据,使用的是一个上面定义的execute的一个回调方法。
4、停止无人车
import time
camera.unobserve_all()
time.sleep(1.0)
robot.stop()5、倒车
前面介绍的是向前行驶和转弯,还缺少一个能倒车的功能,恩,很简单,调用backward函数即可
robot.backward(0.8)
time.sleep(0.5)
robot.stop()6、调节颜色数组
我这里是用红色的胶带粘贴在地板上,所以使用的是红色的数组,当然这里我们可以显示mask来测试颜色数组是否设置的比较恰当,代码如下
from matplotlib import pyplot as plt
%matplotlib inline
from IPython import displayfor i in range(10):frame = camera.valueframe = cv2.resize(frame, (300, 300))frame_=cv2.GaussianBlur(frame,(5,5),0) hsv=cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)mask=cv2.inRange(hsv,color_lower,color_upper) # 颜色数组的取值范围mask=cv2.erode(mask,None,iterations=2)mask=cv2.dilate(mask,None,iterations=2)mask=cv2.GaussianBlur(mask,(3,3),0) plt.imshow(mask)plt.show()#display.clear_output(wait=True)这里我将display.clear_output(wait=True)注释,将会连续生成10张图片,全部在Jupyter中展示出来。我们也可以去掉注释,这样每次的生成将会清除上一次的图片,这样便于更好地观察。10张连续图片也做成了动图便于大家了解:
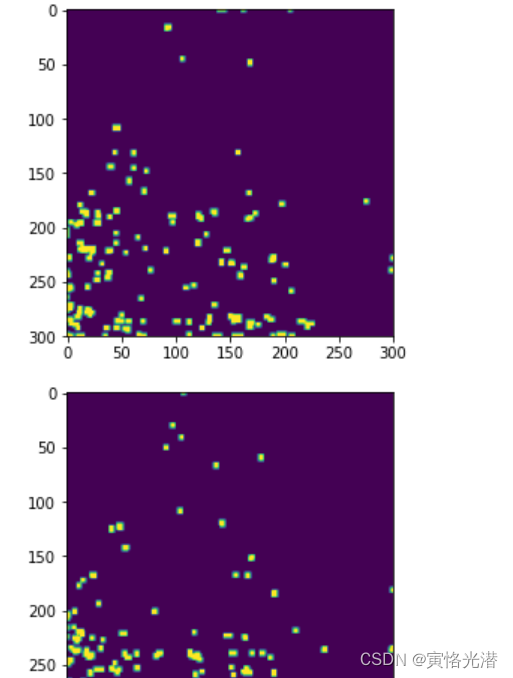
如果这里没有出现mask或者比较少的情况,就需要调节颜色数组,让其更好地匹配线路。
7、模拟方向盘
有些时候不想要自动驾驶来控制,而且很多场景更需要人来远程控制,比如在矿山等危险地方,最好的方法就是能够远程去控制工程车去进行作业。
有了上面的向前向后和转弯的了解后,我们就可以制作一个模拟方向盘来控制无人车了。
7.1、按钮部件
# 创建按钮
button_layout = widgets.Layout(width='100px', height='80px', align_self='center')
stop_button = widgets.Button(description='停止', button_style='danger', layout=button_layout)
forward_button = widgets.Button(description='向前', layout=button_layout)
backward_button = widgets.Button(description='向后', layout=button_layout)
left_button = widgets.Button(description='向左', layout=button_layout)
right_button = widgets.Button(description='向右', layout=button_layout)# 显示按钮
middle_box = widgets.HBox([left_button, stop_button, right_button], layout=widgets.Layout(align_self='center'))
controls_box = widgets.VBox([forward_button, middle_box, backward_button])
display(controls_box)如图:
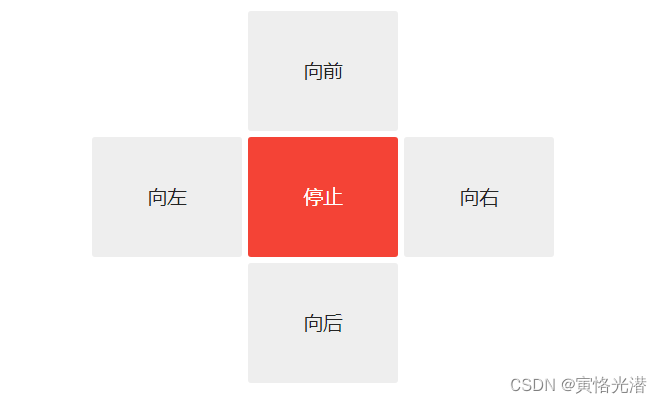
方向盘的布局,通过widgets.Layout创建层,在这个上面通过widgets.Button创建按钮,然后将按钮通过widgets.HBox和widgets.VBox进行横向和垂直的排版即可。Horizontal:水平的,横向。Vertical:垂直的
7.2、方向控制方法
def stop(change):robot.stop()def step_forward(change):robot.forward(0.8)time.sleep(0.5)robot.stop()def step_backward(change):robot.backward(0.8)time.sleep(0.5)robot.stop()def step_left(change):robot.left(0.6)time.sleep(0.5)robot.stop()def step_right(change):robot.right(0.6)time.sleep(0.5)robot.stop()前后左右加停止按钮的方法,方法体很简单,就是控制左右马达的速度。
7.3、按钮动作
定义好了各自方法之后,只需要将方法绑定到各自的按钮就可以了。
stop_button.on_click(stop)
forward_button.on_click(step_forward)
backward_button.on_click(step_backward)
left_button.on_click(step_left)
right_button.on_click(step_right)这样就可以点击按钮,远程控制无人车了。
8、心跳开关
最后就是介绍下心跳开关,检测无人车与浏览器的连接是否还存在的一种简单方法。可以通过下面显示的滑块调整心跳周期(以秒为单位),如果两次心跳之内不能在浏览器之间往返通信的,那么心跳的status(状态)属性值将会设置为dead,一旦连接恢复连接,status属性将设置为alive
from jetbotmini import Heartbeatheartbeat = Heartbeat()# 这个函数将在心跳状态改变时被调用
def handle_heartbeat_status(change):if change['new'] == Heartbeat.Status.dead:robot.stop()heartbeat.observe(handle_heartbeat_status, names='status')period_slider = widgets.FloatSlider(description='period', min=0.001, max=0.5, step=0.01, value=0.5)
traitlets.dlink((period_slider, 'value'), (heartbeat, 'period'))display(period_slider, heartbeat.pulseout)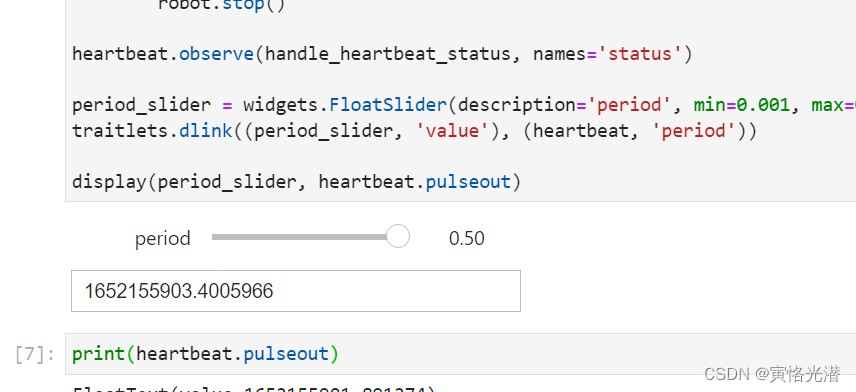
自动驾驶的相关知识点介绍完毕,有错误之处,请指正,一起学习与进步!
相关文章:
无人车沿着指定线路自动驾驶与远程控制的实践应用
有了前面颜色识别跟踪的基础之后,我们就可以设定颜色路径,让无人车沿着指定线路做自动驾驶了,视频:PID控制无人车自动驾驶 有了前几章的知识铺垫,就比较简单了,也是属于颜色识别的一种应用,主要…...
C++ 多态性——纯虚函数与抽象类
抽象类是一种特殊的类,它为一个类族提供统一的操作界面。抽象类是为了抽象和设计的目的而建立的。可以说,建立抽象类,就是为了通过它多态地使用其中的成员函数。抽象类处于类层次的上层,一个抽象类自身无法实例化,也就…...

小程序如何使用防抖和节流?
防抖(Debounce)和节流(Throttle)都是用来优化函数执行频率的技术,特别在处理用户输入、滚动等频繁触发的情况下,它们可以有效减少函数的执行次数,从而提升性能和用户体验。但它们的工作方式和应…...

计算机三级网络技术(持续更新)
BGP考点 A S:自治系统 BGP: Border Gateway Protocol(当前使用的版本是 BGP-4)外部网关协议 动态路由协议可以按照工作范围分为IGP以及EGP。IGP工作在同一个AS内,主要用来发现和计算路由,为AS内提供路由信息的交换&…...
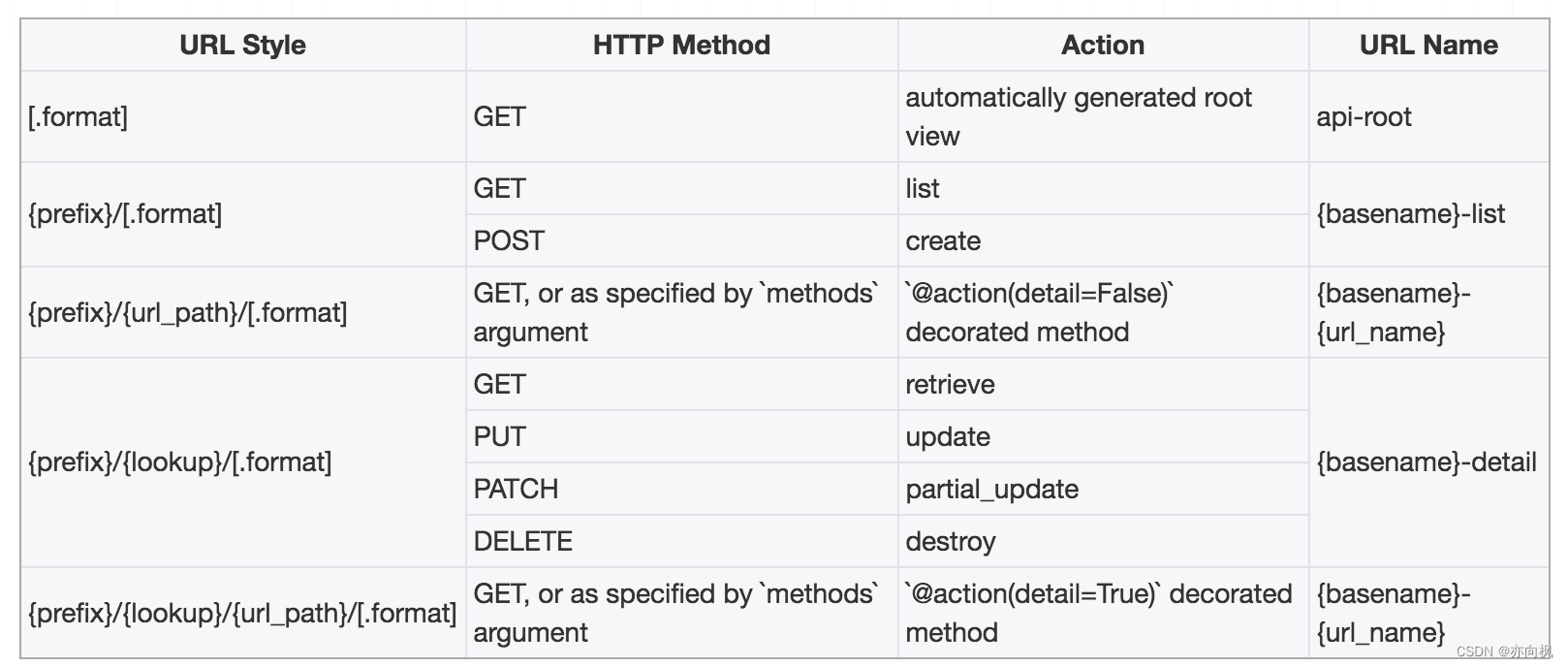
Django Rest_Framework(二)
文章目录 1. http请求响应1.1. 请求与响应1.1.1 Request1.1.1.1 常用属性1).data2).query_params3)request._request 基本使用 1.1.2 Response1.1.2.1 构造方式1.1.2.2 response对象的属性1).data2).status_code3&…...

Kotlin~Visitor访问者模式
概念 将数据结构和操作分离,使操作集合可以独立于数据结构变化。 角色介绍 Visitor:抽象访问者,为对象结构每个具体元素类声明一个访问操作。Element:抽象元素,定义一个accept方法ConcreteElement:具体元…...
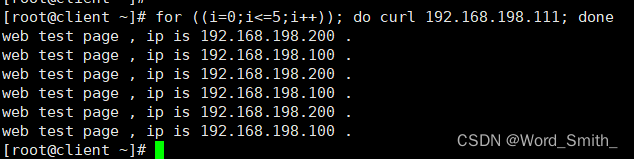
LVS-DR模式集群构建过程演示
一、工作原理 LVS的工作原理 1.当用户向负载均衡调度器(Director Server)发起请求,调度器将请求发往至内核空间 2.PREROUTING链首先会接收到用户请求,判断目标IP确定是本机IP,将数据包发往INPUT链 3.IPVS是工作在IN…...
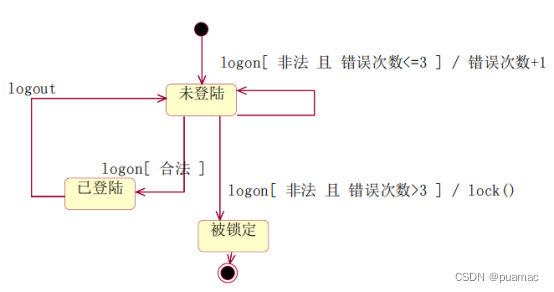
UML-A 卷-知识考卷
UML-A 卷-知识考卷 UML有多少种图,请列出每种图的名字: 常用的几种UML图: 类图(Class Diagram):类图是描述类、接口、关联关系和继承关系的图形化表示。它展示了系统中各个类之间的静态结构和关系。时序…...

BpBinder与PPBinder调用过程——Android开发Binder IPC通信技术
在Android系统中,进程间通信(IPC)是一个非常重要的话题。Android系统通过Binder IPC机制实现进程间通信,而Binder IPC通信技术则是Android系统中最为重要的进程间通信技术之一。本文将介绍Binder IPC通信技术的原理,并…...

篇十五:模板方法模式:固定算法的步骤
篇十五:"模板方法模式:固定算法的步骤" 设计模式是软件开发中的重要知识,模板方法模式(Template Method Pattern)是一种行为型设计模式,用于定义一个算法的骨架,将算法中一些步骤的具…...
web-ssrf
目录 ssrf介绍 以pikachu靶场为例 curl 访问外网链接 利用file协议查看本地文件 利用dict协议扫描内网主机开放端口 file_get_content 利用file协议查看本地文件: fsockopen() 防御方式: ssrf介绍 服务器端请求伪造,是一种由攻击者构造形成…...
)
【HarmonyOS】【续集】实现从视频提取音频并保存到pcm文件功能(API6 Java)
【关键字】 视频提取类Extractor、视频编解码、保存pcm文件、getAudioTime 【背景和问题】 上篇中介绍了从视频提取音频并保存到pcm文件功能,请参考文档:https://developer.huawei.com/consumer/cn/forum/topic/0209125665541017202?fid0101591351254…...

MySQL为什么要使用 B+Tree 作为索引结构?
MySQL为什么要使用 BTree 作为索引结构? 基本情况 常规的数据库存储引擎 ,一般都是采用 B 树或者 B树来实现索引的存储。B树是一种多路平衡树,用这种存储结构来存储大量数据,它的整个高度 会相比二叉树来说 ,会矮很多…...

Three.js阴影
目录 Three.js入门 Three.js光源 Three.js阴影 使用灯光后,场景中就会产生阴影。物体的背面确实在黑暗中,这称为核心阴影(core shadow)。我们缺少的是落下的阴影(drop shadow),即对象在其他…...

VSCode Remote-SSH (Windows)
1. VSCode 安装 VSCode 2. 安装扩展 Remote SSH Getting started Follow the step-by-step tutorial or if you have a simple SSH host setup, connect to it as follows: Press F1 and run the Remote-SSH: Open SSH Host… command.Enter your user and host/IP in the …...

现代C++中的从头开始深度学习【1/8】:基础知识
一、说明 提及机器学习框架与研究和工业的相关性。现在很少有项目不使用Google TensorFlow或Meta PyTorch,在于它们的可扩展性和灵活性。也就是说,花时间从头开始编码机器学习算法似乎违反直觉,即没有任何基本框架。然而,事实并非…...
Jwt(Json web token)——使用token的权限验证方法 用户+角色+权限表设计 SpringBoot项目应用
目录 引出使用token的权限验证方法流程 用户、角色、权限表设计权限表角色表角色-权限关联表用户表查询用户的权限(四表联查)数据库的视图 项目中的应用自定义注解拦截器controller层DTO返回给前端枚举类型的json化日期json问题 实体类-DAO 总结 引出 1.…...

SpringWeb项目核心功能总结
SpringWeb项目核心功能总结 文章目录 SpringWeb项目核心功能总结1.浏览器与Java程序的连接(个人偏好使用RequestMapping)2.参数的传入3.结果的返回请求转发和请求重定向的区别 核心功能用到的注解: RestControllerControllerResponseBodyRequ…...

Django------信号
Django 框架包含了一个信号机制,它允许若干个发送者(sender)通知一组接收者(receiver)某些特定操作或事件(events)已经发生了, 接收者收到指令信号(signals)后再去执行特定的操作。本文主要讲解Django信号(…...

HTML5 中新增了哪些表单元素?
聚沙成塔每天进步一点点 ⭐ 专栏简介⭐ HTML5 中新增了的表单元素⭐ 写在最后 ⭐ 专栏简介 前端入门之旅:探索Web开发的奇妙世界 记得点击上方或者右侧链接订阅本专栏哦 几何带你启航前端之旅 欢迎来到前端入门之旅!这个专栏是为那些对Web开发感兴趣、刚…...
别再裸发ROS图像了!image_transport保姆级教程:从压缩传输到参数调优,一次搞定
别再裸发ROS图像了!image_transport保姆级教程:从压缩传输到参数调优,一次搞定 在机器人视觉开发中,图像传输往往是性能瓶颈的关键所在。许多开发者习惯性地使用ros::Publisher/Subscriber直接处理图像数据,却不知这种…...

如何利用碎片时间高效背单词:ToastFish桌面工具完整使用教程
如何利用碎片时间高效背单词:ToastFish桌面工具完整使用教程 【免费下载链接】ToastFish 一个利用摸鱼时间背单词的软件。 项目地址: https://gitcode.com/GitHub_Trending/to/ToastFish 想要在工作或学习间隙轻松记忆单词,却苦于没有专门的学习时…...

如何用AI生成高性能无机材料?MatterGen让材料设计革命化
如何用AI生成高性能无机材料?MatterGen让材料设计革命化 【免费下载链接】mattergen Official implementation of MatterGen -- a generative model for inorganic materials design across the periodic table that can be fine-tuned to steer the generation tow…...

深度技术解析:Lenovo Legion Toolkit 高级性能调优与系统集成指南
深度技术解析:Lenovo Legion Toolkit 高级性能调优与系统集成指南 【免费下载链接】LenovoLegionToolkit Lightweight Lenovo Vantage and Hotkeys replacement for Lenovo Legion laptops. 项目地址: https://gitcode.com/gh_mirrors/le/LenovoLegionToolkit …...

瀚高企业版V9.1.1在pg_restore还原备份文件时提示extract函数语法问题
文章目录环境症状问题原因解决方案环境 系统平台:UOS(海光) 版本:9.0 症状 瀚高数据库版本:企业版 V9.1.1 症状: pg_restore还原备份文件时,提示下面错误 pg_restore: 来自 TOC 记录 259; …...

终极指南:5分钟让Switch手柄在Windows上完美运行
终极指南:5分钟让Switch手柄在Windows上完美运行 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitcode.com/gh_mi…...

如何快速掌握猫抓工具:终极视频嗅探与下载指南
如何快速掌握猫抓工具:终极视频嗅探与下载指南 【免费下载链接】cat-catch 猫抓 浏览器资源嗅探扩展 / cat-catch Browser Resource Sniffing Extension 项目地址: https://gitcode.com/GitHub_Trending/ca/cat-catch 还在为网页上的精彩视频无法保存而烦恼吗…...

Selenium动作链原理与Go实战:模拟人类交互的底层机制
1. 为什么“动作链”不是锦上添花,而是Selenium自动化绕不开的生死线你写过driver.FindElement(By.Id("submit")).Click(),也用过SendKeys("hello"),甚至加了Thread.Sleep(2000)等页面加载——但当你要拖拽一个滑块完成验…...

仅剩最后47个印尼语专属Voice ID配额!ElevenLabs企业版印尼语音定制通道即将关闭——附2024Q3合规接入白皮书
更多请点击: https://codechina.net 第一章:印尼语Voice ID配额告急与企业定制通道关闭预警 近期,多家使用印尼语(Bahasa Indonesia)语音身份验证(Voice ID)服务的企业客户收到平台侧自动通知&…...
|新手踩坑全总结 + 最终可运行代码博客简介)
C 语言通讯录(终版)|新手踩坑全总结 + 最终可运行代码博客简介
系列回顾 本系列三篇完整闭环: 第一篇(基础版):从零实现增删查改 文件存储,踩遍新手所有坑(格式符乱码、文件闪退、输入死循环);第二篇(优化版)࿱…...