STM32--GPIO
文章目录
- GPIO简介
- GPIO的基本结构
- GPIO位结构
- GPIO模式
- LED和蜂鸣器
- LED闪烁工程及程序原码
- 代码:
- 蜂鸣器工程和程序原码
- 代码
- 传感器
- 光敏传感器控制蜂鸣器工程
- 代码
GPIO简介
GPIO(General Purpose Input Output)是通用输入/输出口的简称。它是一种可以通过软件控制的端口扩展器,常见于各种嵌入式系统和单片机中。GPIO具有以下特点和优势:
- 低功耗:GPIO使用的电流较小,能够在嵌入式系统中实现低功耗的控制和监视功能。
- 小封装:GPIO芯片通常采用小封装的设计,占据较小的空间,适用于空间有限的应用场景。
- 低成本:GPIO芯片的制造成本相对较低,可以降低整体系统的成本。
- 布线简单:GPIO的接口设计一般比较简单,连接和布线也相对容易,方便用户进行外部设备的控制和数据采集。
通过使用GPIO,我们可以将外部设备与嵌入式系统或单片机连接起来,实现与外部设备的通信、控制和数据采集功能。例如,通过配置GPIO的输入输出状态,可以实现控制LED灯的亮灭、读取按键的状态、控制电机的转动等。GPIO的灵活性使得它在各个领域中得到广泛的应用,如物联网、工业自动化、智能家居等。
GPIO的基本结构
GPIO的基本结构通常包括以下几个主要组成部分:
-
输入/输出引脚(IO Pins):GPIO芯片上的引脚用于连接外部设备或其他电路。这些引脚可以被配置为输入或输出模式,以实现对外部信号的读取或控制。
-
控制逻辑(Control Logic):控制逻辑是用来配置和控制GPIO引脚工作模式和行为的电路。它接收来自外部或内部的控制信号,并根据相应的配置将其传递给相应的GPIO引脚。
-
寄存器(Registers):寄存器是用来存储GPIO的配置和状态信息的特殊内存单元。通过读写寄存器中的特定位或字段,可以配置引脚的工作模式、使能或禁用某些功能,以及监控引脚的状态。
-
数据缓冲器(Data Buffer):数据缓冲器用于在GPIO引脚和外部设备之间传输数据。根据引脚的配置,数据缓冲器可以将输出数据驱动到外部设备,或者从外部设备读取输入数据。
-
驱动器(Drive):驱动器用于增强信号在引脚与寄存器之间的传输。对于一些信号来说,传输信号比较弱,通过配置驱动器,使之增强达到驱动效果。
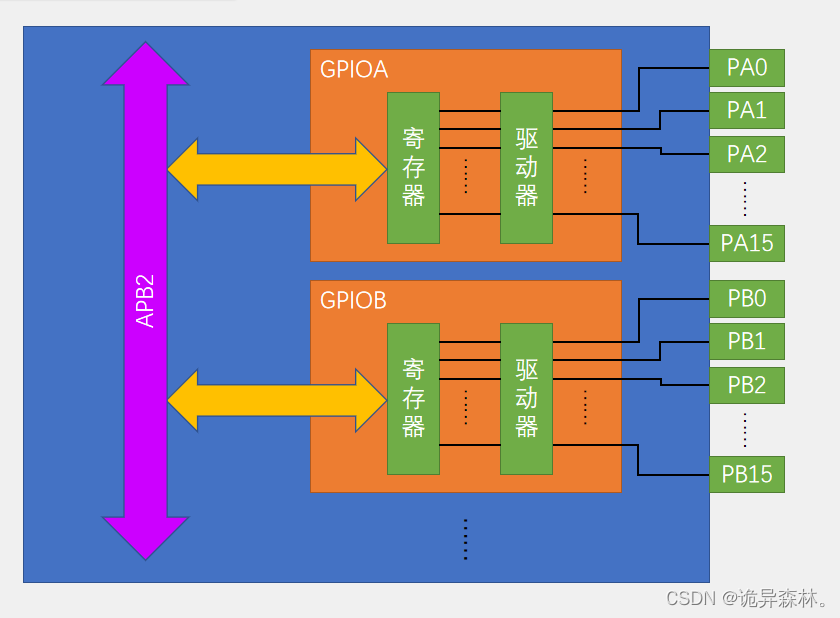
这里的GPIO连接着APB2总线;软件的编程程序将会从这里输入或输出;
下图为STM32总电路图

GPIO位结构
对于STM32每个端口位来说,每个I/O端口位可以自由编程,然而必须按照32位字访问I/O端口寄存器(不允许半字或字节访问)。
下图是I/O端口位的基本结构
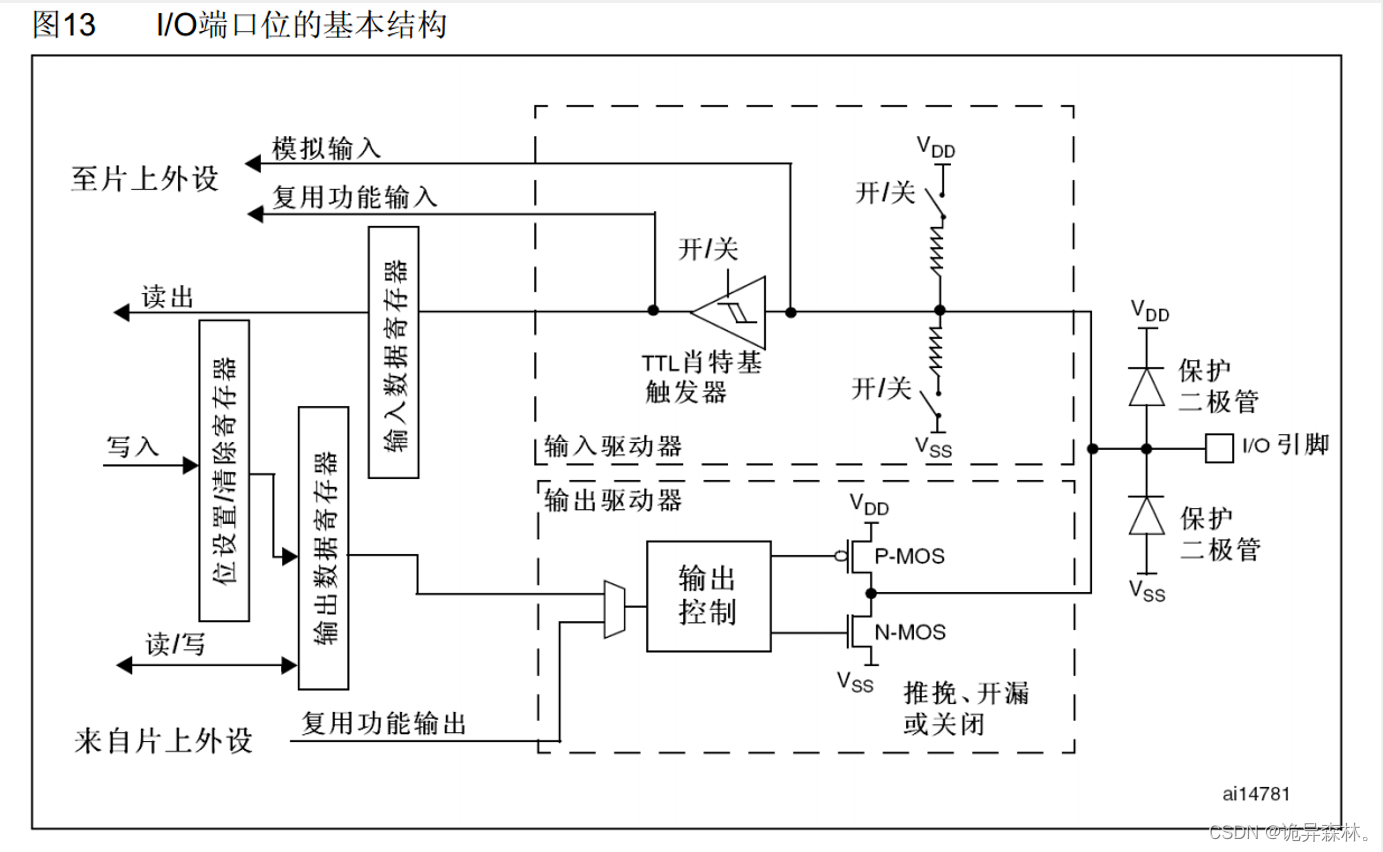
整体分为寄存器,驱动器和某个I/O引脚;
上半部分是输入部分,下半部分是输出部分;
先从I/O引脚说起,这里的两个保护二极管是对输入电压的限制;上边接的是3.3V的VDD,下边接的是0V的VSS;如果接入的电压超过3.3V,那么输入的电压产生的电流将会流入VDD,避免过高的电压对电路产生伤害;如果接入的电压小于0V(相对VSS),那么电流就会从VSS的正极流向I/O引脚,从而保护电路;
所以,保护二极管将输入电压限制在了0-3.3V之间了;
接着看输入驱动器的连接电阻的部分,这里连接的是上拉电阻和下拉电阻,上拉电阻连接VDD,下拉电阻连接VSS,因此可以通过程序来控制;
如果上面导通,下面断开,就是上拉输入模式;如果下面导通,上面断开,就是下拉输入模式;如果两个都断开,就是浮空输入模式;
这个上拉和下拉目的是为了提供一个默认的输入电平;对于数字信号来说,只识别高电平和低电平;倘若输入引脚没有接上外设,就不知道此时是高电平还是低电平,实际此时处于浮空输入状态吗,那么此时很容易受到外界的干扰,接上了这两个电阻后,当接上是上拉电阻,引脚悬空时可由上拉电阻来保持高电平,所以上拉默认为高电平输入模式;下拉就反过来,保持低电平状态,下拉默认为低电平输入模式,这样就能防止外界的干扰,使浮空时状态更加稳定;
还有这里是弱上拉和弱下拉,目的是为了不影响正常操作;
顺着电路看到TTL,施密特触发器,作用是对电压进行整形;
执行逻辑是输入电压高于某一阈值,那么将会瞬间变为高电平;输入电压低于某一阈值,那么将会瞬间变为低电平;
由于输入电压是从外界进来的,输入的数字信号不会保持一定程度的高低电平,输入信号会有所波动,所以有这个触发器就能让这些波动变为高低电平;
然后看到输入数据寄存器,通过施密特触发器处理的数字信号将会进入到寄存器,我们用程序就可以读取到寄存器中的数据;
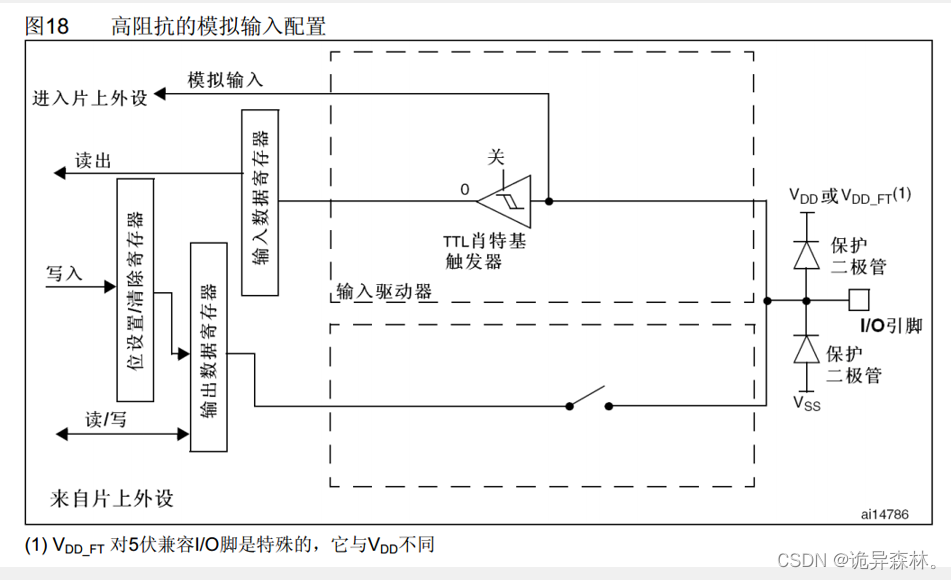
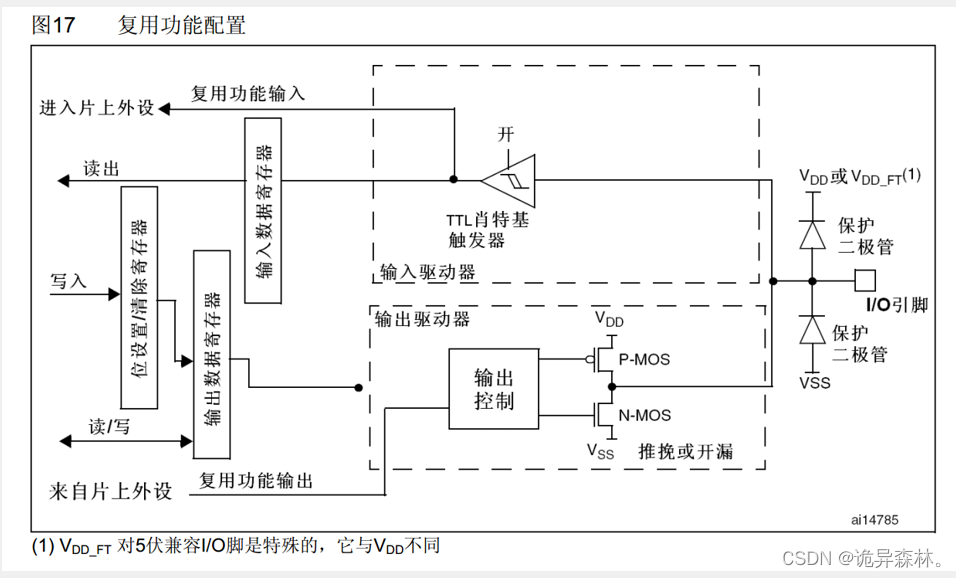
看到上方的模拟输入和复用功能输入,这里是连接片上外设的,模拟输入是ADC模拟数字信号,接在施密特触发器前,可以处理信号;复用功能输入接收的是数字量,所以接在施密特触发器之后;
接着看输出部分,数字信号可以由输出寄存器或片上外设控制;两种输出模式都会通过数据选择器接到输出控制部分;如果是输出寄存器,那么通过普通的I/O口就能进行输出;
最左边的位设置/清除寄存器,用来单独操作输出寄存器的某一位,而不影响其他位。因为这个输出寄存器有16位,且这个寄存器只能整体读写,所以通过这个设置/清除寄存器,能够设置某一位为1或0,剩下不需要的位将它们置为0/1即可;接着就会对输出寄存器对应位置的位进行传输;直接一步到位;
位设置就是将某一位设置为1,位清除就是将某一位设置为0;
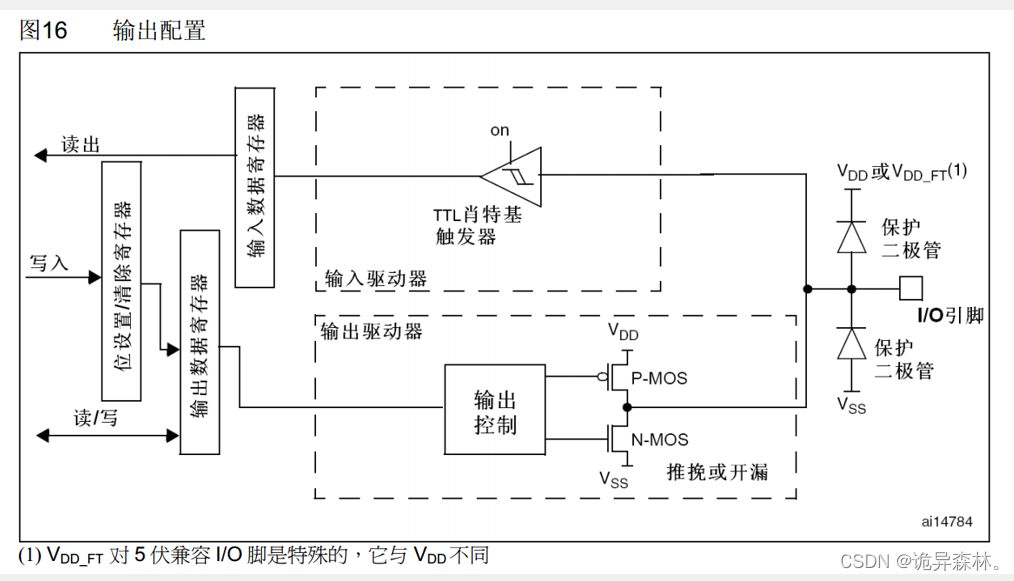
接着看到两个MOS管,它是一种电子开关,通过信号来控制开关的导通和关闭,开关负责将接口接到VSS或VDD;
这里有两种模式,第一种是推挽输出模式,这个模式P-MOS和N-MOS均有效。数据寄存器输出1时那么上管导通下管关闭,输出直接接到VDD,保持高电平;数据为0时,那么上管关闭下管导通,输出直接接到VSS,保持低电平;这种模式高低电平均有较强的驱动能力,所以推挽输出也叫强输出模式。
第二种是开漏输出模式,这个模式只有N-MOS有效;数据寄存器输出1时,下管断开,这时相当于输出断开,也就是高阻模式,无效;数据寄存器输出0时,下管导通,输出直接接到VSS,也就是输出低电平;也就是说,这种模式高电平没有驱动能力,低电平才有驱动能力;
关闭就说明两个MOS管都关闭,输出无效;
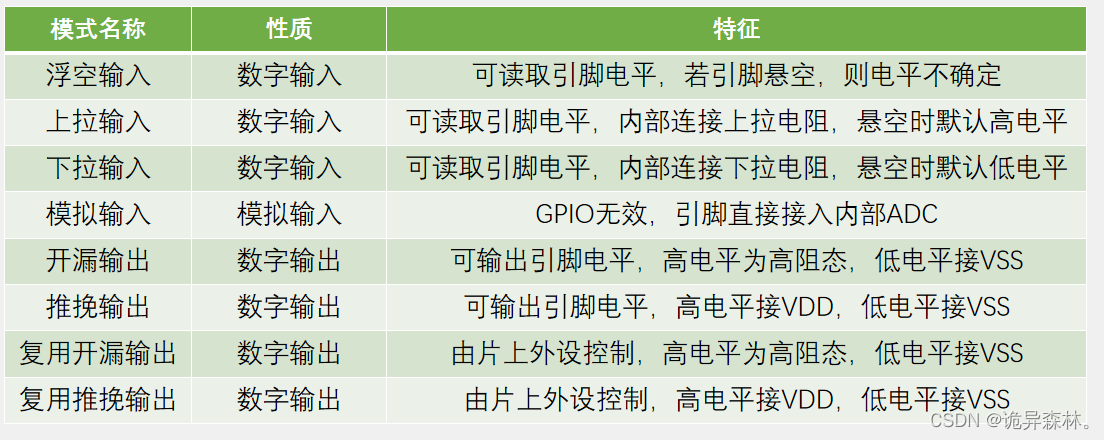
GPIO模式
根据数据手册中列出的每个I/O端口的特定硬件特征, GPIO端口的每个位可以由软件分别配置成多种模式。
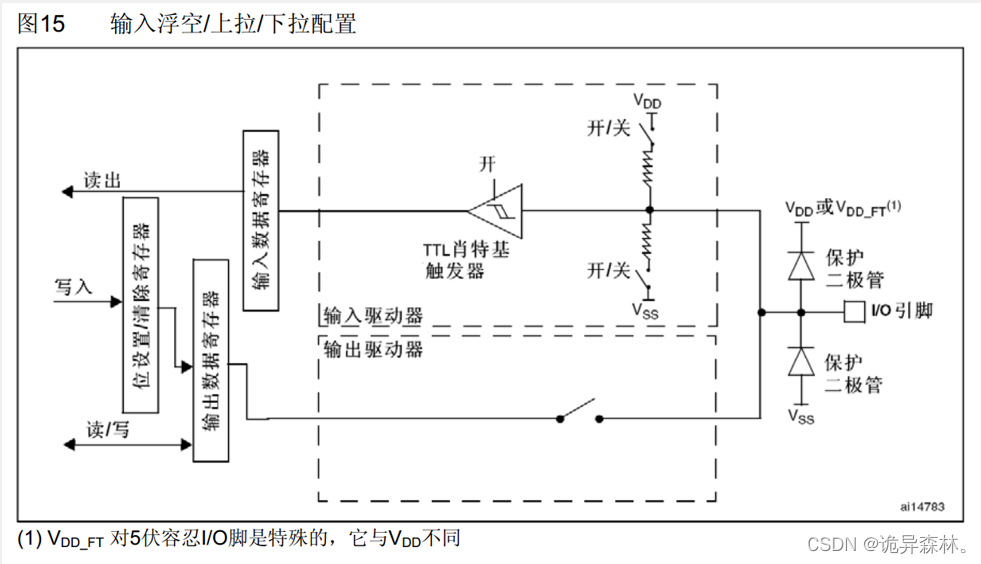
下面给出各模式配置的电路图:
浮空/上拉/下拉输入
模拟输入
推挽/开漏输出
复用推挽/开漏输出
LED和蜂鸣器
LED:发光二极管,正向通电点亮,反向通电不亮
有源蜂鸣器:内部自带振荡源,将正负极接上直流电压即可持续发声,频率固定,(我们所使用的是有源蜂鸣器)
无源蜂鸣器:内部不带振荡源,需要控制器提供振荡脉冲才可发声,调整提供振荡脉冲的频率,可发出不同频率的声音
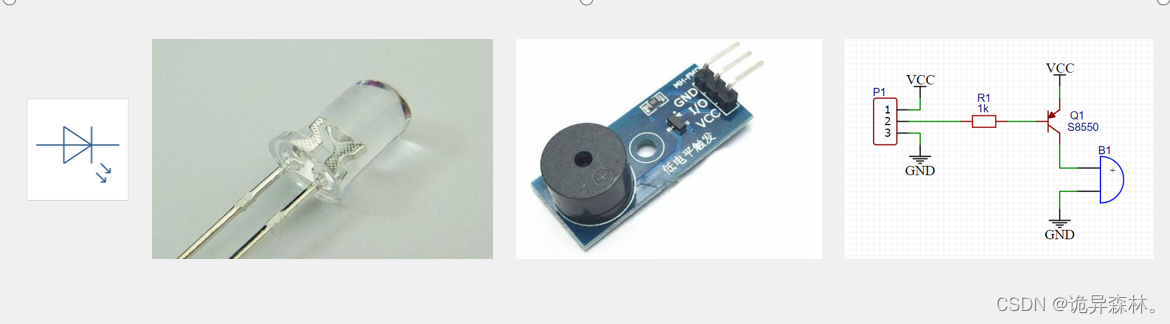
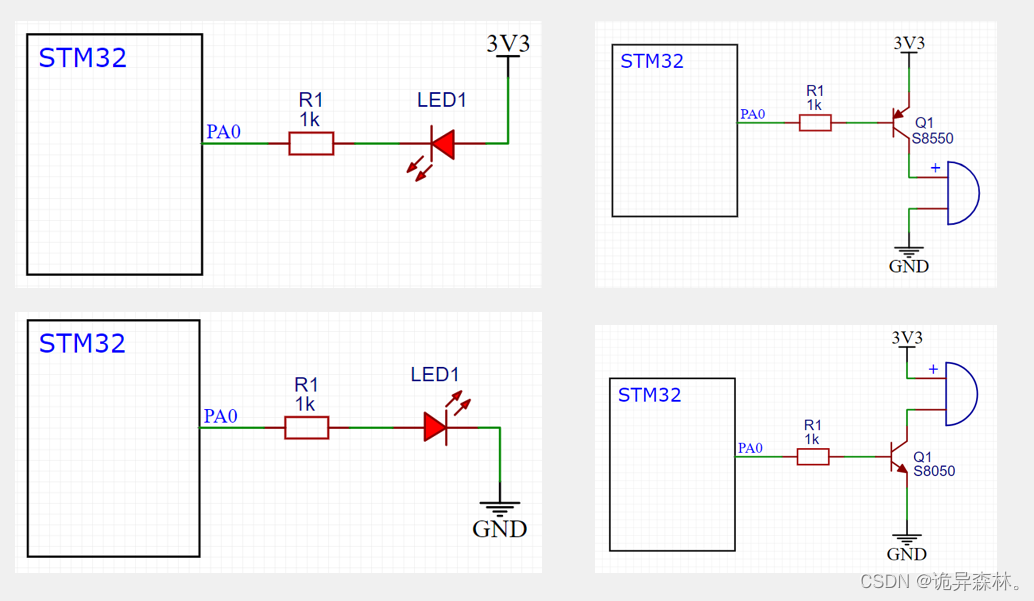
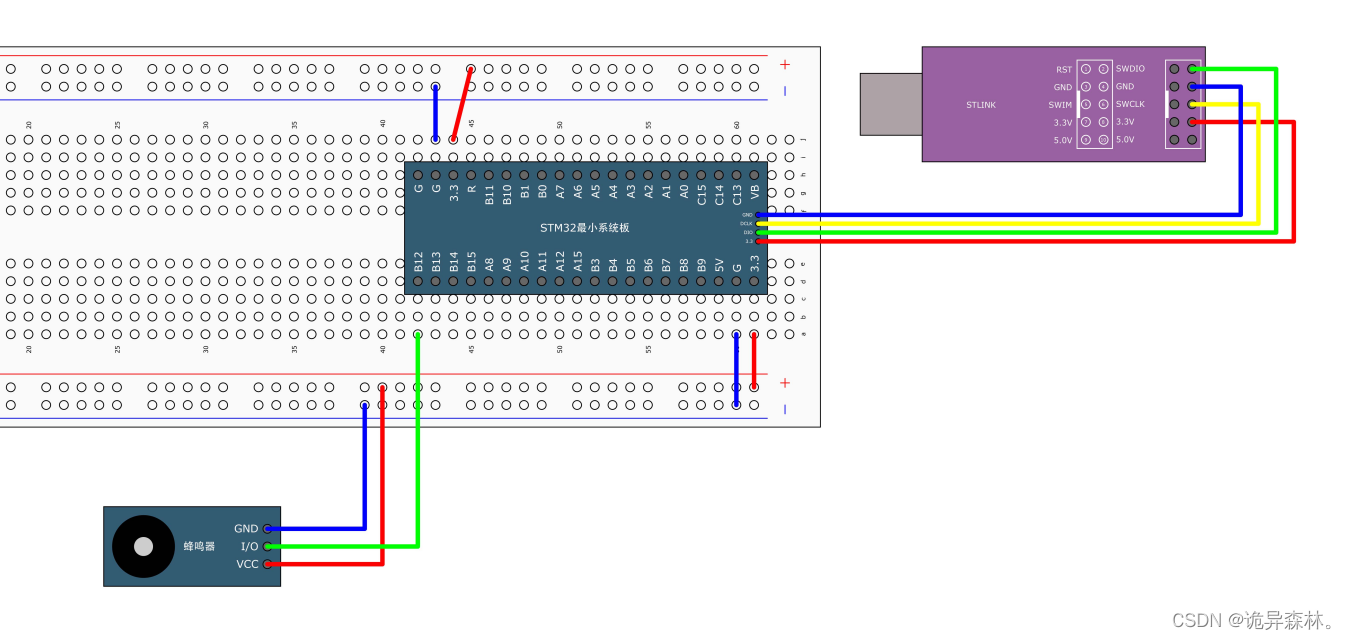
这是LED和蜂鸣器连接STM32的电路图。
第一个是由电源提供连接二极管的正极,二极管负极连接STM32,通过STM32的低电平触发,二极管正向导通,STM32高电平二极管两端都为3.3V,无法使二极管导通;连接电阻是控制电流大小,还有可以调节二极管的亮度。
第三个是让二极管正极接在STM32的PA0口上,负极接地;那么只有在STM32输出高电平时,发光二极管才会正向导通;
上面介绍中,在推挽输出模式下,高低电平均有较强的驱动能力,所以两种解法均可。一般情况下,我们习惯用第一种方法,因为单片机和芯片上使用的是高电平弱驱动,低电平强驱动的规则,避免高低电平混乱;
第二个是蜂鸣器电路,用到三极管驱动方案;
对于功率比较大的,直接用I/O口连接的话STM32负担较大,所以采用三极管的驱动方案;三极管左边是基极,带箭头是发射极,下面是集电极;左边的基极给低电平,三极管就会导通,通过3.3V和GND的连接,三接管就导通;基极给出高电平,三接管就会关闭,蜂鸣器无电流通过;
第四个图也是蜂鸣器电路,但操作方式与第二个正好相反;
一样的,三极管左边是基极,带箭头是发射极,下面是集电极;当基极为高电平时,三极管导通,蜂鸣器有电流;低电平时,三极管关闭,蜂鸣器无电流;
三极管的导通需要基极和发射极保持一定的电压;
LED闪烁工程及程序原码
我们要在面包板上连接好我们的电路:
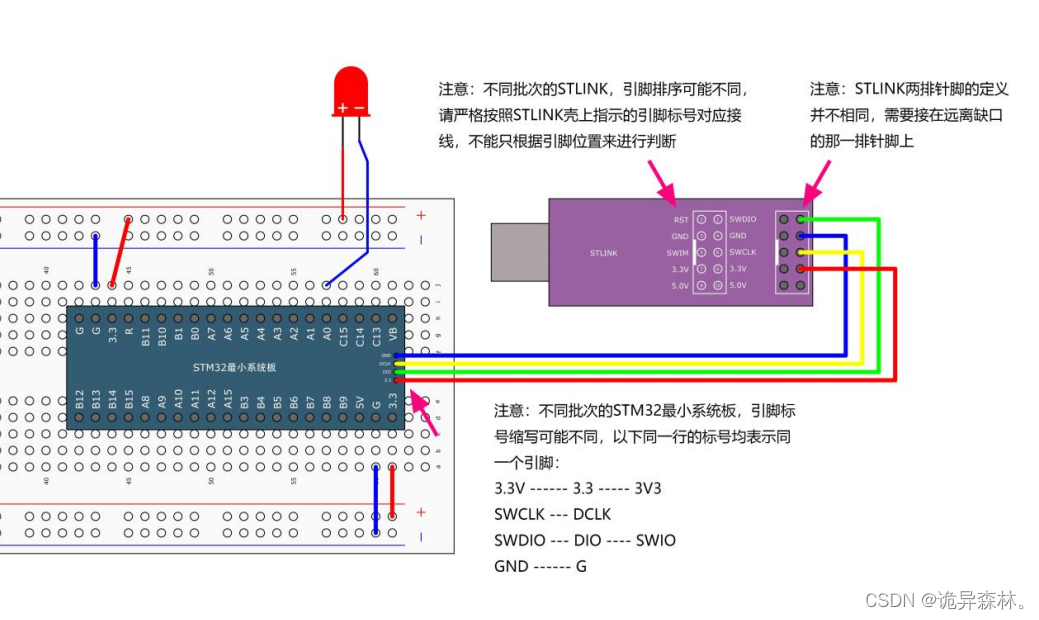
之后就可以编写程序了。
我们首先复制工程模板,创建一个工程文件夹;然后在mian.c上操作即可;
首先需要对GPIO的I/O接口进行一定的配置;
● 输出缓冲器被激活
─ 开漏模式:输出寄存器上的’0’激活N-MOS,而输出寄存器上的’1’将端口置于高阻状态(PMOS从不被激活)。
─ 推挽模式:输出寄存器上的’0’激活N-MOS,而输出寄存器上的’1’将激活P-MOS。
● 施密特触发输入被激活
● 弱上拉和下拉电阻被禁止
● 出现在I/O脚上的数据在每个APB2时钟被采样到输入数据寄存器
● 在开漏模式时,对输入数据寄存器的读访问可得到I/O状态
● 在推挽式模式时,对输出数据寄存器的读访问得到最后一次写的值。
我们在STM32的总线路可以看出需要设置APB2外设时钟开关;
当外设时钟没有启用时,软件不能读出外设寄存器的数值,返回的数值始终是0x0。
这里我们输入RCC_APB2PeriphClockCmd函数,输入后选中该函数,点击右键,
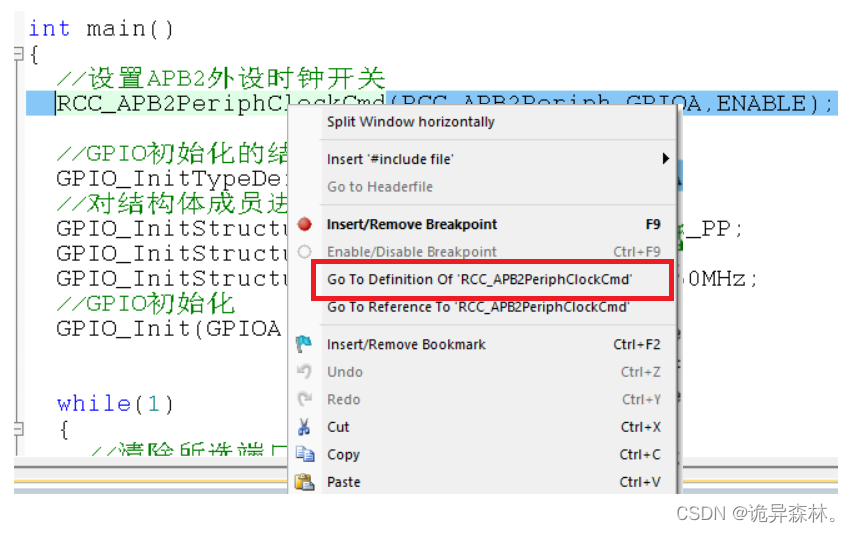
选中定义,
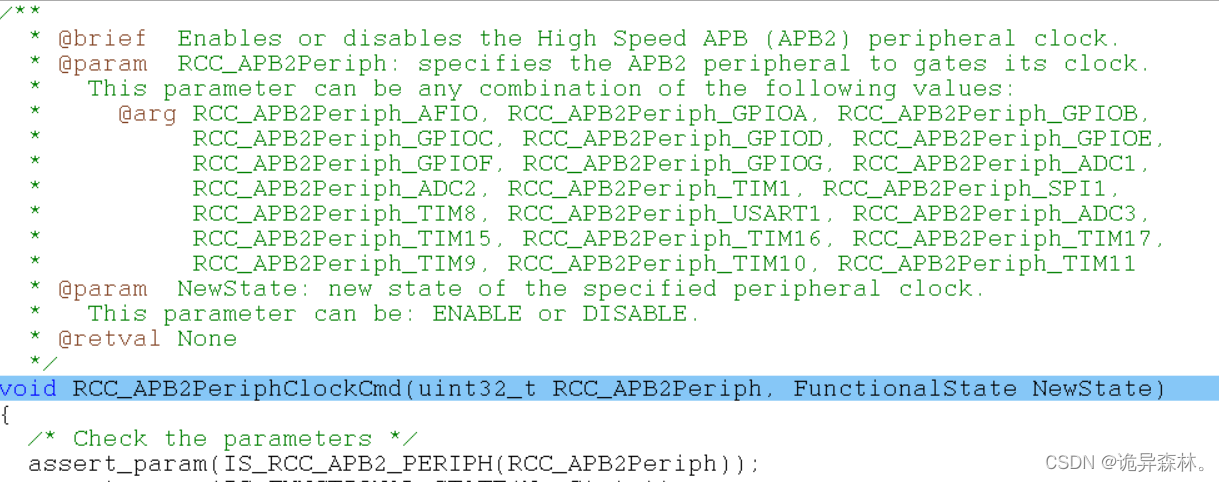
这里我们可以看清这个函数的参数使用和函数的功能;
参数这里选择RCC_APB2Periph_GPIOA,ENABLE
接着就对GPIO进行模式选择和I/O端位口的选择;
在库函数中,使用的是结构体,我们需要对结构体给出一个变量,
GPIO_InitTypeDef GPIO_InitStructure
然后跟上面同意的道理,选中进入定义;
对结构体成员进行赋值,也就是模式和端口位的选择;
最后就对GPIO结构体进行初始化,这样就完成GPIO的输出配置。
代码:
delay.c
#include "stm32f10x.h"/*** @brief 微秒级延时* @param xus 延时时长,范围:0~233015* @retval 无*/
void Delay_us(uint32_t xus)
{SysTick->LOAD = 72 * xus; //设置定时器重装值SysTick->VAL = 0x00; //清空当前计数值SysTick->CTRL = 0x00000005; //设置时钟源为HCLK,启动定时器while(!(SysTick->CTRL & 0x00010000)); //等待计数到0SysTick->CTRL = 0x00000004; //关闭定时器
}/*** @brief 毫秒级延时* @param xms 延时时长,范围:0~4294967295* @retval 无*/
void Delay_ms(uint32_t xms)
{while(xms--){Delay_us(1000);}
}/*** @brief 秒级延时* @param xs 延时时长,范围:0~4294967295* @retval 无*/
void Delay_s(uint32_t xs)
{while(xs--){Delay_ms(1000);}
}
delay.h
#ifndef __DELAY_H
#define __DELAY_Hvoid Delay_us(uint32_t us);
void Delay_ms(uint32_t ms);
void Delay_s(uint32_t s);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"int main()
{//设置APB2外设时钟开关RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//GPIO初始化的结构体 变量类型GPIO_InitTypeDef GPIO_InitStructure;//对结构体成员进行赋值GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;//推挽输出GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//GPIO初始化GPIO_Init(GPIOA,&GPIO_InitStructure);while(1){//清除所选端口数据端口位,置0GPIO_ResetBits(GPIOA,GPIO_Pin_0);Delay_ms(100);//设置所选端口数据端口位,置1GPIO_SetBits(GPIOA,GPIO_Pin_0);Delay_ms(500);//设置或清除所选数据端位口GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_RESET);Delay_ms(500);GPIO_WriteBit(GPIOA,GPIO_Pin_0,Bit_SET);Delay_ms(500);GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)0);//强制转换为1Delay_ms(500);GPIO_WriteBit(GPIOA,GPIO_Pin_0,(BitAction)1);Delay_ms(500);}
}
接着就是在while(1)循环中让PA0口在高低电平中置换;
这里可以直接设置/清除所选数据端口位函数GPIO_SetBits与GPIO_ResetBits,也可以写入用设置或清除所选数据端口位函数GPIO_WriteBit;
这里的位用了枚举类型,可以运用枚举类型的定义,进行不同的切换;

蜂鸣器工程和程序原码
代码
#include "stm32f10x.h" // Device header
#include "Delay.h"int main()
{//设置APB2外设时钟开关RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//GPIO初始化的结构体 变量类型GPIO_InitTypeDef GPIO_InitStructure;//对结构体成员进行赋值GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin=GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;//GPIO初始化GPIO_Init(GPIOB,&GPIO_InitStructure);while(1){GPIO_ResetBits(GPIOB,GPIO_Pin_12);Delay_ms(100);GPIO_SetBits(GPIOB,GPIO_Pin_12);Delay_ms(100);GPIO_ResetBits(GPIOB,GPIO_Pin_12);Delay_ms(100);GPIO_SetBits(GPIOB,GPIO_Pin_12);Delay_ms(700);}
}
传感器
传感器模块:传感器元件(光敏电阻/热敏电阻/红外接收管等)的电阻会随外界模拟量的变化而变化,电阻不好观察,再通过与定值电阻分压即可得到模拟电压输出,最后通过电压比较器进行二值化即可得到数字电压输出。
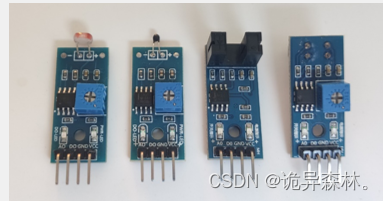

这是传感器的电路图。
先看第三个电路图,N1就是可变电阻,随着光线、温度、等外界因素的变化而变化;R1是N1分压的定值电阻,R1与N1串联,定值电阻一端接VCC,N1一端接GND,这就构成简单的串联电路,C2是滤波电容,可以保证电路的稳定。它并不是电路的主要框架,看电路图可以先把它省略。AO就是我们模拟的电压输出;
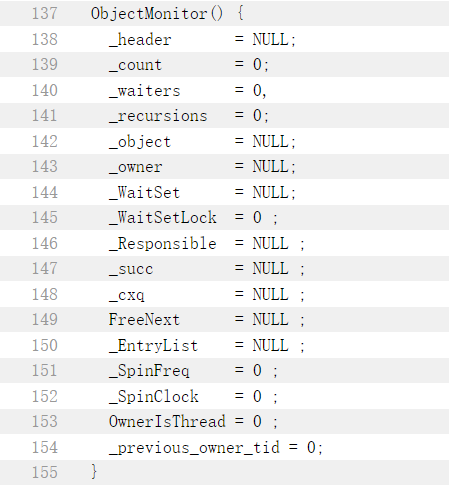
该模块还支持数字输出,AO通过电压比较器的二值化(第一个图)将模拟电压转换为数字电压DO;
第二个图是可调值电阻,通过该电阻可以调节传感器的变化阈值;
第四个图也就是总的传感器模块图;DO连接着发光二极管,低电平时亮,高电平时不亮;
我们连接是转换为数字电压输出,所以AO引脚可以不接。
光敏传感器控制蜂鸣器工程

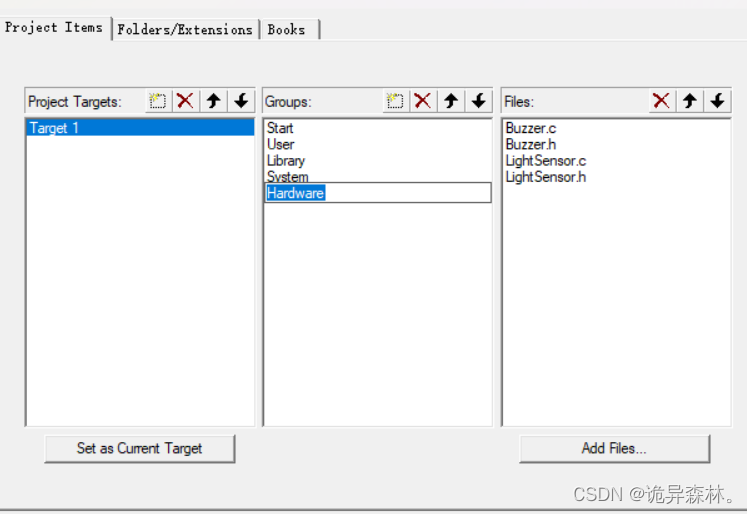
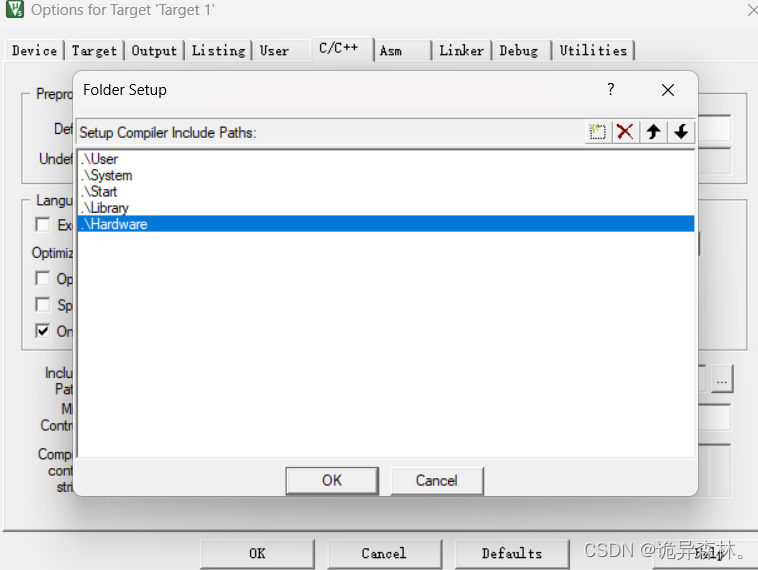
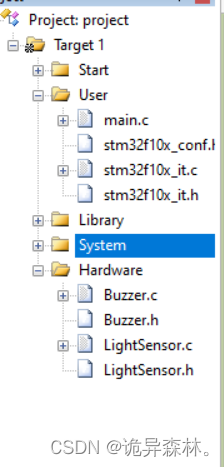
这里对蜂鸣器和传感器分别装在一个文件中,创建完记得在三色箱子进行拓充和魔法棒的C/C++进行补充;
代码
buzzer.h
#ifndef __BUZZER_H__
#define __BUZZER_H__void Buzzer_Init();
void Buzzer_ON();
void Buzzer_OFF();
void Buzzer_Turn();#endif
buzzer.c
#include "stm32f10x.h" // Device header//Buzzer的初始化
void Buzzer_Init()
{//设置APB2外设时钟开关RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//选择结构体成员GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//初始化结构体GPIO_Init(GPIOB, &GPIO_InitStructure);//初始化为低电平,改为高电平GPIO_SetBits(GPIOB, GPIO_Pin_12);}//Buzzer打开
void Buzzer_ON()
{GPIO_ResetBits(GPIOB, GPIO_Pin_12);
}
//Buzzer关闭
void Buzzer_OFF()
{GPIO_SetBits(GPIOB, GPIO_Pin_12);
}//Buzzer执行相反的操作
void Buzzer_Turn()
{if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_12)==0){GPIO_SetBits(GPIOB, GPIO_Pin_12);}else{GPIO_ResetBits(GPIOB, GPIO_Pin_12);}
}LightSensor.c
#include "stm32f10x.h" // Device header//传感器的初始化
void LightSensor_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//上拉输入,默认高电平GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}//获取传感器的信号
uint8_t LightSensor_Get(void)
{return GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_13);//灯光较亮时,传感器的指示灯亮,输入低电平//灯光较暗时,传感器指示灯不亮,输入高电平
}
LightSensor.h
#ifndef __LIGHTSENSOR_H__
#define __LIGHTSENSOR_H__void LightSensor_Init(void);
uint8_t LightSensor_Get(void);//uint8_t表示unsigned char#endif
mian.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "Buzzer.h"
#include "LightSensor.h"int main()
{LightSensor_Init();Buzzer_Init();while(1){//外界较暗时,感应器输入高电平(1),蜂鸣器响起if(LightSensor_Get()){Buzzer_ON();}//外界较亮时,感应器输入低电平(0),蜂鸣器不响else{Buzzer_OFF();}}
}相关文章:
STM32--GPIO
文章目录 GPIO简介GPIO的基本结构GPIO位结构GPIO模式LED和蜂鸣器LED闪烁工程及程序原码代码: 蜂鸣器工程和程序原码代码 传感器光敏传感器控制蜂鸣器工程代码 GPIO简介 GPIO(General Purpose Input Output)是通用输入/输出口的简称。它是一种…...

剑指 Offer ! 61. 扑克牌中的顺子
参考资料:力扣K神的讲解 剑指 Offer 61. 扑克牌中的顺子 简单 351 相关企业 从若干副扑克牌中随机抽 5 张牌,判断是不是一个顺子,即这5张牌是不是连续的。2~10为数字本身,A为1,J为11,Q为12&…...

《玩转Python数据分析专栏》大纲
欢迎来到《玩转Python数据分析分类专栏》!在这个专栏中,我们将带您深入探索数据分析的世界,以Python为工具,解析各个领域的实际应用场景。通过100篇教程,我们将逐步引领您从入门级到高级,从基础知识到实战技巧,助您成为一名优秀的数据分析师。 专栏目标 本专栏旨在帮助…...
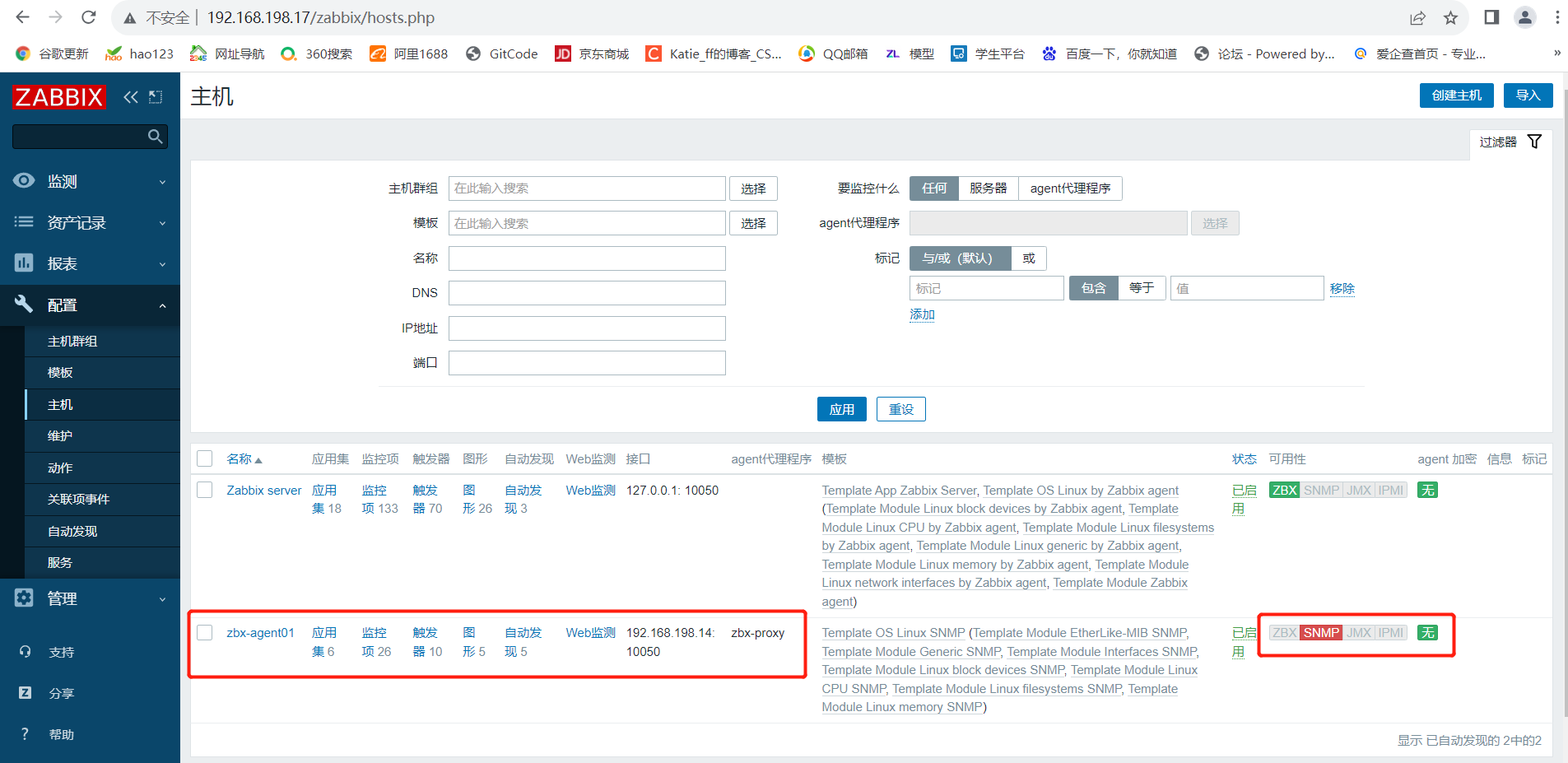
Zabbix自动注册服务器及部署代理服务器
文章目录 一.zabbix自动注册1.什么是自动注册2.环境准备3.zabbix客户端配置4.在 Web 页面配置自动注册5.验证自动注册 二.部署 zabbix 代理服务器1.分布式监控的作用:2.环境部署3.代理服务器配置4.客户端配置5.web页面配置5.1 删除原来配置5.2 添加代理5.3 创建主机…...

SpringBoot下使用自定义监听事件
事件机制是Spring的一个功能,目前我们使用了SpringBoot框架,所以记录下事件机制在SpringBoot框架下的使用,同时实现异步处理。事件机制其实就是使用了观察者模式(发布-订阅模式)。 Spring的事件机制经过如下流程: 1、自定义事件…...
并发编程面试题1
并发编程面试题1 一、原子性高频问题: 1.1 Java中如何实现线程安全? 多线程操作共享数据出现的问题。 锁: 悲观锁:synchronized,lock乐观锁:CAS 可以根据业务情况,选择ThreadLocal,让每个…...
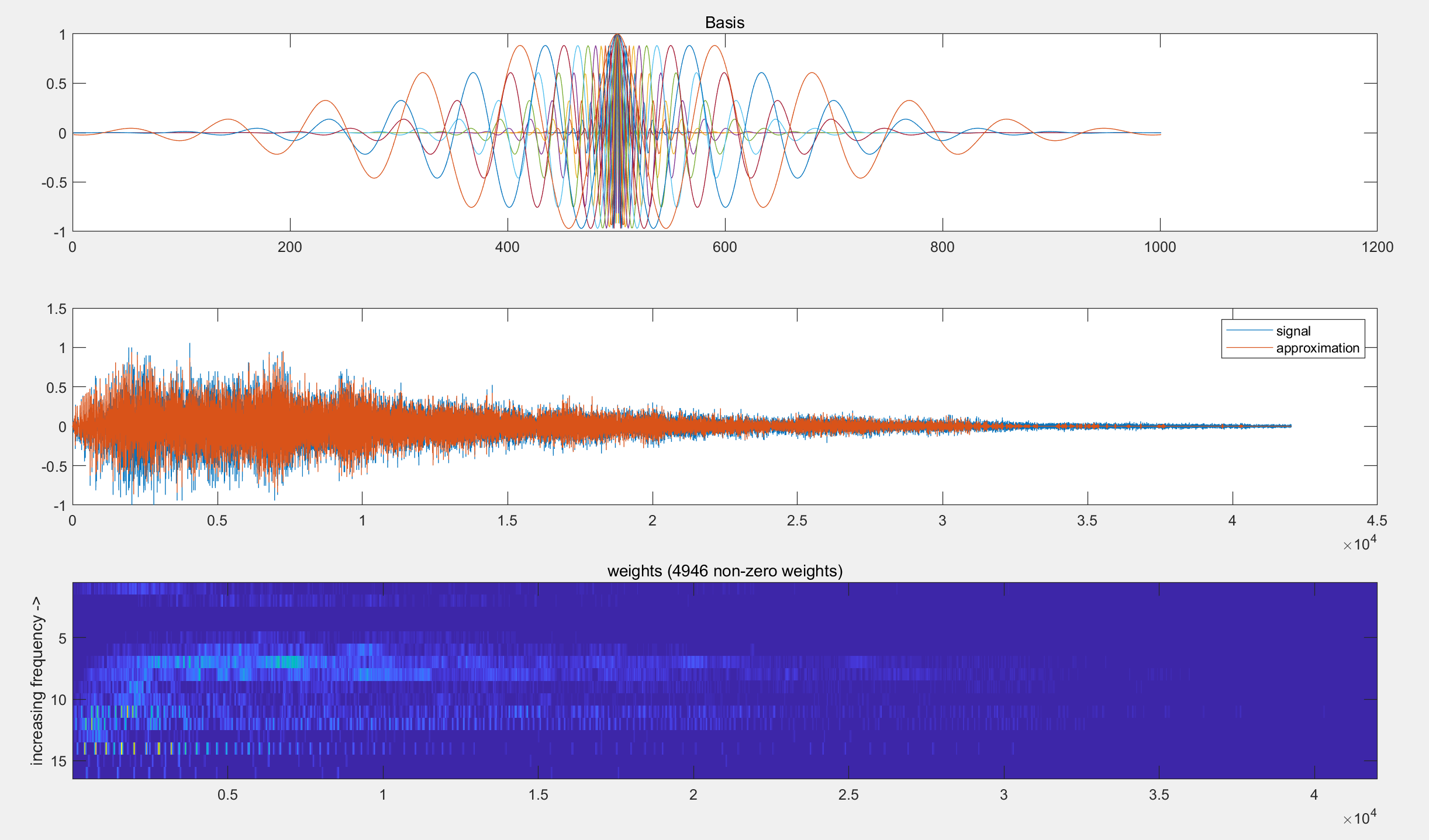
【对于一维信号的匹配】对一个一维(时间)信号y使用自定义基B执行匹配追踪(MP)研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
【Oracle 数据库 SQL 语句 】积累1
Oracle 数据库 SQL 语句 1、分组之后再合计2、显示不为空的值 1、分组之后再合计 关键字: grouping sets ((分组字段1,分组字段2),()) select sylbdm ,count(sylbmc) a…...

Django中级指南:理解并实现Django的模型和数据库迁移
Django 是一个极其强大的 Python Web 框架,它提供了许多工具和特性,能够帮助我们更快速、更便捷地构建 Web 应用。在本文中,我们将会关注 Django 中的模型(Models)和数据库迁移(Database Migrations&#x…...

Chatgpt API调用报错:openai.error.RateLimitError
Chatgpt API 调用报错: openai.error.RateLimitError: You exceeded your current quota, please check your plan and billing details. 调用OpenAI API接口 import openai import osopenai.api_key os.getenv("OPENAI_API_KEY")result openai.Chat…...

一键获取数百张免费商用人脸!AI人脸生成器来袭
随着科技的发展,人工智能正在渗透到生活的各个角落,设计行业也不例外。在网页、APP、PPT 等界面设计中,设计师经常需要插入真实的人脸素材,以增强作品的真实感和场景化。但是获取素材既不容易,质量和价格也难免成为设计…...
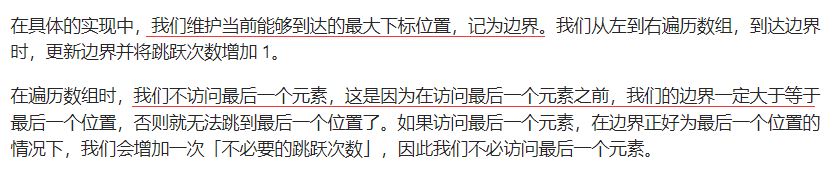
跳跃游戏 II——力扣45
文章目录 题目描述解法一 贪心题目描述 解法一 贪心 int jump(vector<int>& nums){in...

Stable Diffusion - 常用的负向提示 Embeddings 解析与 坐姿 (Sitting) 提示词
欢迎关注我的CSDN:https://spike.blog.csdn.net/ 本文地址:https://spike.blog.csdn.net/article/details/132145248 负向 Embeddings 是用于提高 StableDiffusion 生成图像质量的技术,可以避免生成一些不符合预期的图像特征,比如…...
:C#实现指南)
工厂方法模式(一):C#实现指南
工厂方法模式是一种创建型设计模式,用于处理对象的创建问题。通过使用工厂方法模式,我们可以将对象的创建过程与使用过程分离,从而增加代码的灵活性和可维护性。 工厂方法模式的定义 工厂方法模式定义了一个创建对象的接口,但由子…...

Spring接口InitializingBean的作用和使用介绍
在Spring框架中,InitializingBean接口是一个回调接口,用于在Spring容器实例化Bean并设置Bean的属性之后,执行一些自定义的初始化逻辑。实现InitializingBean接口的Bean可以在初始化阶段进行一些必要的操作,比如数据的初始化、资源…...
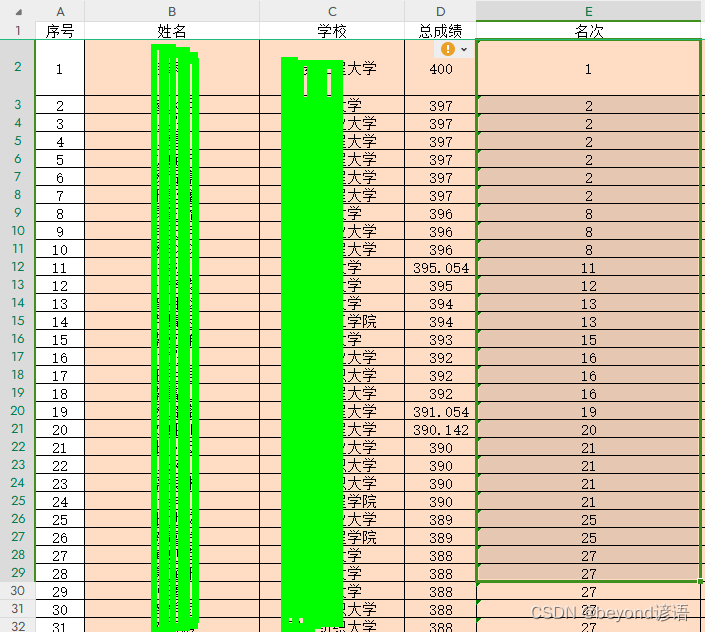
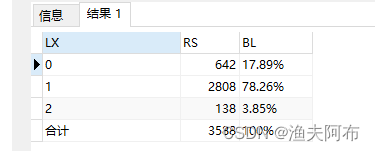
Excel---成绩相同者,名次并列排列,三步搞定
需求:一张成绩表,共341行(340条数据,第一条为标题),根据成绩进行排序,成绩相同进行名次并列 一、选择生成结果的位置,我这里点击了一下E2单元格 二、公式—>插入–>rank函数 数值:D2 表示…...

Elasticsearch6.x和7.x的区别
Elasticsearch6.x和7.x的区别 1、查找方面的区别 在增删改方面,6.x和7.x是一样的,在查找方面(分为普通查找和有高亮的查找),6.x和7.x有区别。 在7.x的es中: org.springframework.data.elasticsearch.cor…...

基于STM32设计的口罩识别和无线测温系统
一、设计需求 基于STM32设计的口罩识别和无线测温系统 1.1 项目背景 随着深度学习和计算机视觉的快读发展,与此有关的技术设备已经被大幅度的使用,并且不仅仅在这两个方面,更在许许多多的领域都有使用。众所周知,图像理解之中的最重要的一个步骤即为目标检测,和为目标检测…...

第五十天
●软件测试的目的 软件测试的目的是寻找错误,并且尽可能找出更多的错误。 测试是程序的执行过程,目的在于发现错误 一个好的测试用例在于能够发现至今为止未发现的错误 一个成功的测试是发现了至今未发现的错误的测试 ●软件测试工作流程࿱…...

vue-pc端elementui-统一修改问题-Dialog 对话框点击空白关闭问题-element-所有组件层级问题
前言 实际开发我们经常发现dialog弹出框默认点击遮罩层空白地方就会关闭-有属性可以关闭 但是经常会图方便-或者已经写完了,不想一个个写,可以在main.js进行统一关闭 当我们在页面进行复杂设计和层级关闭改变,会发现右上角的退出登录弹出款…...

Ofd2Pdf完整指南:3种高效方法实现OFD到PDF的无损转换
Ofd2Pdf完整指南:3种高效方法实现OFD到PDF的无损转换 【免费下载链接】Ofd2Pdf Convert OFD files to PDF files. 项目地址: https://gitcode.com/gh_mirrors/ofd/Ofd2Pdf OFD(Open Fixed-layout Document)作为我国自主研发的电子文档…...

OpenDataLab MinerU实战解析:PPT内容一键摘要,会议记录好帮手
OpenDataLab MinerU实战解析:PPT内容一键摘要,会议记录好帮手 1. 引言:会议记录的革命性工具 在日常工作中,会议记录和PPT内容整理是许多职场人士的痛点。传统方法需要人工逐页阅读、摘抄重点,不仅耗时耗力ÿ…...

基于SDMatte的Java后台服务构建:高并发图片处理架构设计
基于SDMatte的Java后台服务构建:高并发图片处理架构设计 1. 为什么需要专业级图片处理服务 电商平台每天要处理数十万张商品图片,其中背景抠图是最耗时的环节之一。传统方案要么依赖Photoshop手动操作,要么使用开源工具但效果参差不齐。我们…...

文墨共鸣:如何用AI理解文字“意思”而不仅仅是“文字”?
文墨共鸣:如何用AI理解文字“意思”而不仅仅是“文字”? 你有没有遇到过这样的情况?两段文字,用词完全不同,但说的却是同一个意思。或者反过来,字面看起来差不多,但想表达的核心观点天差地别。…...

造相Z-Image模型v2提示词工程进阶:结构化Prompt构建方法
造相Z-Image模型v2提示词工程进阶:结构化Prompt构建方法 用对方法,让AI真正听懂你的创意 不知道你有没有这样的经历:脑子里有个特别棒的画面,但用Z-Image生成出来的结果总是差那么点意思。要么细节不对,要么风格跑偏&a…...

Graphormer分子预测模型5分钟快速部署:零基础搭建药物发现AI工具
Graphormer分子预测模型5分钟快速部署:零基础搭建药物发现AI工具 1. 项目概述 Graphormer是微软研究院开发的基于Transformer架构的分子属性预测模型,专门用于处理分子图结构数据。与传统的图神经网络(GNN)相比,Graphormer通过创新的结构编…...

投放Facebook广告需要多少预算?又如何提升转化率?
随着这两年独立站市场的风靡,吸引了大量卖家的涌入。我们都知道,独立站不像平台是自带流量的,需要我们自己去推广引流。所以,我们在投放广告的时候,一定会优先考虑广告预算的问题。很多卖家也会问到:我们每…...

我没搞过前端、后端、安卓,但我用AI全部打通技术壁垒
用的cursor,直接给文字需求,实现了前端、后端、网站部署,再到直接生成安卓apk,我全程0代码编写。前后加起来搞了半个月,效果比10年顶级工程师写的还好。 效果预览:http://8.146.228.154/index.html...

AIGlasses_for_navigation 与操作系统原理结合:实现高并发推理服务
AIGlasses_for_navigation 与操作系统原理结合:实现高并发推理服务 最近在折腾一个基于AIGlasses_for_navigation的实时导航服务,想法挺酷,但一上线就遇到了大麻烦。想象一下,成千上万的用户同时请求路线规划,你的服务…...

“人工智能+”政策给企业带来的机遇与JBoltAI的助力
企业引入AI项目与产品的显著优势 在“人工智能”政策的大背景下,企业引入AI项目与产品能够带来多方面的优势。首先,AI技术能够显著提升业务处理效率。例如,在金融行业,智能风控模型可以快速分析大量数据,精准识别潜在…...