竞赛项目 车位识别车道线检测 - python opencv
0 前言
🔥 优质竞赛项目系列,今天要分享的是
🚩 深度学习 机器视觉 车位识别车道线检测
该项目较为新颖,适合作为竞赛课题方向,学长非常推荐!
🥇学长这里给一个题目综合评分(每项满分5分)
- 难度系数:3分
- 工作量:3分
- 创新点:4分
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
简介
你是不是经常在停车场周围转来转去寻找停车位。如果你的车辆能准确地告诉你最近的停车位在哪里,那是不是很爽?事实证明,基于深度学习和OpenCV解决这个问题相对容易,只需获取停车场的实时视频即可。
该项目可推荐用于竞赛项目
检测效果
废话不多说, 先上效果图


注意车辆移动后空车位被标记上


车辆移动到其他车位

实现方式
整体思路
这个流程的第一步就是检测一帧视频中所有可能的停车位。显然,在我们能够检测哪个是没有被占用的停车位之前,我们需要知道图像中的哪些部分是停车位。
第二步就是检测每帧视频中的所有车辆。这样我们可以逐帧跟踪每辆车的运动。
第三步就是确定哪些车位目前是被占用的,哪些没有。这需要结合前两步的结果。
最后一步就是出现新车位时通知我。这需要基于视频中两帧之间车辆位置的变化。
这里的每一步,我们都可以使用多种技术用很多种方式实现。构建这个流程并没有唯一正确或者错误的方式,但不同的方法会有优劣之分。
使用要使用到两个视觉识别技术 :识别空车位停车线,识别车辆
检测空车位
车位探测系统的第一步是识别停车位。有一些技巧可以做到这一点。例如,通过在一个地点定位停车线来识别停车位。这可以使用OpenCV提供的边缘检测器来完成。但是如果没有停车线呢?
我们可以使用的另一种方法是假设长时间不移动的汽车停在停车位上。换句话说,有效的停车位就是那些停着不动的车的地方。但是,这似乎也不可靠。它可能会导致假阳性和真阴性。
那么,当自动化系统看起来不可靠时,我们应该怎么做呢?我们可以手动操作。与基于空间的方法需要对每个不同的停车位进行标签和训练不同,我们只需标记一次停车场边界和周围道路区域即可为新的停车位配置我们的系统。
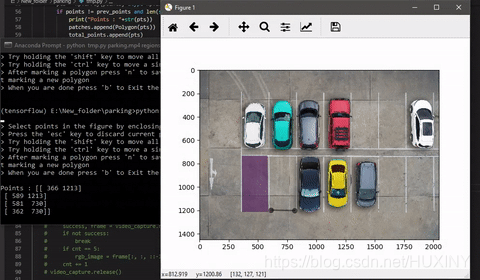
在这里,我们将从停车位的视频流中截取一帧,并标记停车区域。Python库matplotlib
提供了称为PolygonSelector的功能。它提供了选择多边形区域的功能。
我制作了一个简单的python脚本来标记输入视频的初始帧之一上的多边形区域。它以视频路径作为参数,并将选定多边形区域的坐标保存在pickle文件中作为输出。
import os
import numpy as np
import cv2
import pickle
import argparse
import matplotlib.pyplot as plt
from matplotlib.patches import Polygon
from matplotlib.widgets import PolygonSelector
from matplotlib.collections import PatchCollection
from shapely.geometry import box
from shapely.geometry import Polygon as shapely_polypoints = []
prev_points = []
patches = []
total_points = []
breaker = Falseclass SelectFromCollection(object):def __init__(self, ax):self.canvas = ax.figure.canvasself.poly = PolygonSelector(ax, self.onselect)self.ind = []def onselect(self, verts):global pointspoints = vertsself.canvas.draw_idle()def disconnect(self):self.poly.disconnect_events()self.canvas.draw_idle()def break_loop(event):global breakerglobal globSelectglobal savePathif event.key == 'b':globSelect.disconnect()if os.path.exists(savePath):os.remove(savePath)print("data saved in "+ savePath + " file") with open(savePath, 'wb') as f:pickle.dump(total_points, f, protocol=pickle.HIGHEST_PROTOCOL)exit()def onkeypress(event):global points, prev_points, total_pointsif event.key == 'n': pts = np.array(points, dtype=np.int32) if points != prev_points and len(set(points)) == 4:print("Points : "+str(pts))patches.append(Polygon(pts))total_points.append(pts)prev_points = pointsif __name__ == '__main__':parser = argparse.ArgumentParser()parser.add_argument('video_path', help="Path of video file")parser.add_argument('--out_file', help="Name of the output file", default="regions.p")args = parser.parse_args()global globSelectglobal savePathsavePath = args.out_file if args.out_file.endswith(".p") else args.out_file+".p"print("\n> Select a region in the figure by enclosing them within a quadrilateral.")print("> Press the 'f' key to go full screen.")print("> Press the 'esc' key to discard current quadrilateral.")print("> Try holding the 'shift' key to move all of the vertices.")print("> Try holding the 'ctrl' key to move a single vertex.")print("> After marking a quadrilateral press 'n' to save current quadrilateral and then press 'q' to start marking a new quadrilateral")print("> When you are done press 'b' to Exit the program\n")video_capture = cv2.VideoCapture(args.video_path)cnt=0rgb_image = Nonewhile video_capture.isOpened():success, frame = video_capture.read()if not success:breakif cnt == 5:rgb_image = frame[:, :, ::-1]cnt += 1video_capture.release()while True:fig, ax = plt.subplots()image = rgb_imageax.imshow(image)p = PatchCollection(patches, alpha=0.7)p.set_array(10*np.ones(len(patches)))ax.add_collection(p)globSelect = SelectFromCollection(ax)bbox = plt.connect('key_press_event', onkeypress)break_event = plt.connect('key_press_event', break_loop)plt.show()globSelect.disconnect()
(PS: 若代码出现bug可反馈博主, 及时修改)
车辆识别
要检测视频中的汽车,我使用Mask-
RCNN。它是一个卷积神经网络,对来自几个数据集(包括COCO数据集)的数百万个图像和视频进行了训练,以检测各种对象及其边界。 Mask-
RCNN建立在Faster-RCNN对象检测模型的基础上。
除了每个检测到的对象的类标签和边界框坐标外,Mask RCNN还将返回图像中每个检测到的对象的像pixel-wise mask。这种pixel-wise
masking称为“ 实例分割”。我们在计算机视觉领域所看到的一些最新进展,包括自动驾驶汽车、机器人等,都是由实例分割技术推动的。
M-RCNN将用于视频的每一帧,它将返回一个字典,其中包含边界框坐标、检测对象的masks、每个预测的置信度和检测对象的class_id。现在使用class_ids过滤掉汽车,卡车和公共汽车的边界框。然后,我们将在下一步中使用这些框来计算IoU。
由于Mask-RCNN比较复杂,这里篇幅有限,需要mask-RCNN的同学联系博主获取, 下面仅展示效果:

最后
🧿 更多资料, 项目分享:
https://gitee.com/dancheng-senior/postgraduate
相关文章:
竞赛项目 车位识别车道线检测 - python opencv
0 前言 🔥 优质竞赛项目系列,今天要分享的是 🚩 深度学习 机器视觉 车位识别车道线检测 该项目较为新颖,适合作为竞赛课题方向,学长非常推荐! 🥇学长这里给一个题目综合评分(每项满分5分) …...
中文版开源Llama 2同时有了语言、多模态大模型,完全可商用
可以说,AI 初创公司 LinkSoul.Al 的这些开源项目让海外开源大模型在国内的普及和推广速度与国际几乎保持了一致。 7 月 19 日,Meta 终于发布了免费可商用版本 Llama 2,让开源大模型领域的格局发生了巨大变化。 Llama 2 模型系列包含 70 亿、…...
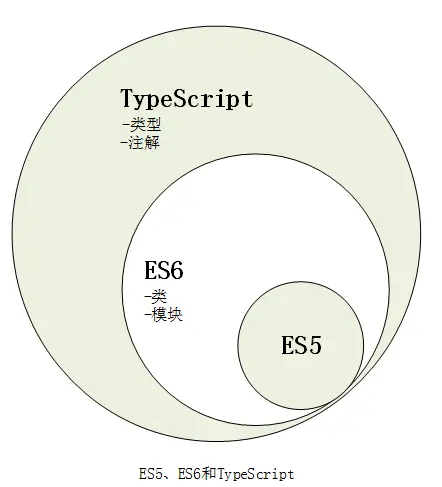
JavaScript、TypeScript、ES5、ES6之间的联系和区别
ECMAScript: 一个由 ECMA International 进行标准化,TC39 委员会进行监督的语言。通常用于指代标准本身。JavaScript: ECMAScript 标准的各种实现的最常用称呼。这个术语并不局限于某个特定版本的 ECMAScript 规范,并且可能被用于…...
RCNA——单臂路由
一,实验背景 之前的VLAN实现的很多都是相同部门互相访问,不同部门无法访问。不过这次整来了一个路由器,领导说大部分的部门虽说有保密信息需要互相隔离,但是这些部门和其它部门也应该互相连通以方便工作交流。因此要配置新的环境&…...

leetcode做题笔记69
给你一个非负整数 x ,计算并返回 x 的 算术平方根 。 由于返回类型是整数,结果只保留 整数部分 ,小数部分将被 舍去 。 注意:不允许使用任何内置指数函数和算符,例如 pow(x, 0.5) 或者 x ** 0.5 。 思路一ÿ…...
!)
CentOS根分区扩容实战(非LVM)!
在虚拟化平台(如KVM,ESXI)中,将虚拟机的磁盘大小扩展到所需的大小。这将增加虚拟机的磁盘空间。 在虚拟机中,使用以下命令查看可用的磁盘和分区信息: sudo fdisk -l确定要扩展的根分区的设备名称(如 /dev/…...
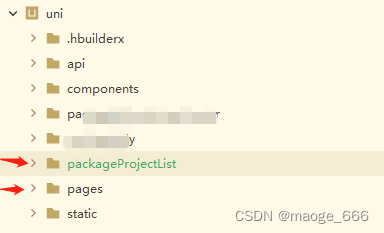
uniapp 微信小程序 分包
1、manifest.json内添加如图所示: "optimization" : {"subPackages" : true },2、在与pages同级上创建各个分包的文件夹 把需要分包的文件对应移入分包文件夹内 3、page.json内修改分包文件的路径 比如: {"path" : &qu…...

Redis_安装、启动以及基本命令
2.Redis安装 2.1前置处理环境 VMware安装安装centOS的linux操作系统xshellxftp 2.2 配置虚拟机网络 按ctrlaltf2 切换到命令行 cd (/)目录 修改/etc/sysconfig/network-scripts/ifcfg-ens3 vi 命令 按insert表示插入 按ctrlesc退出修改状态 :wq 写入并退出 此文件必须保持一…...
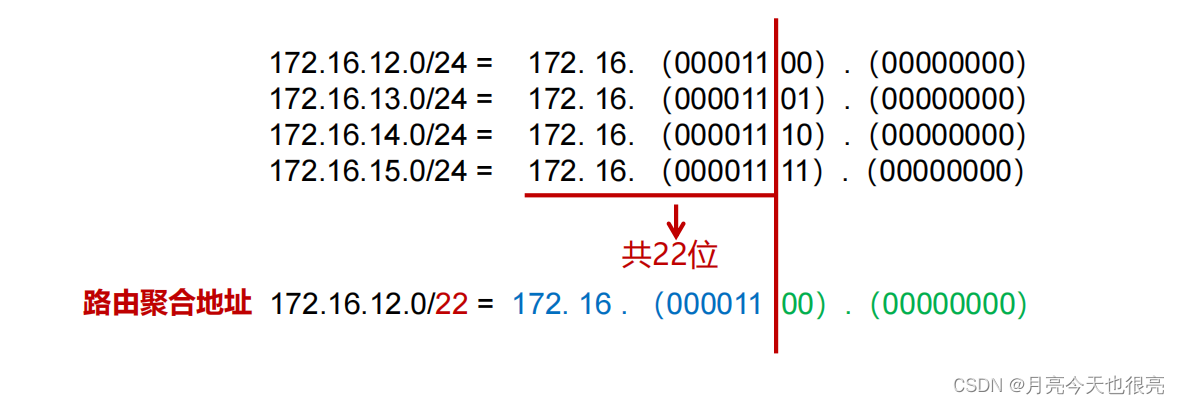
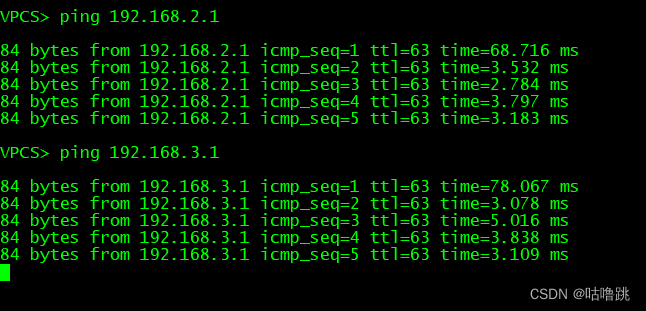
IPv4编址及子网划分
IPv4编址及子网划分 一、IPv4地址概述1.1、IPv4报文结构1.2、IPv4地址分类1.2.1、A类1.2.2、B类1.2.3、C类1.2.4、D类1.2.5、E类 1.3、私有IP地址1.4、特殊地址 二、子网划分2.1、子网掩码2.2、VLSM 可变长的子网掩码2.3、子网划分2.4、子网划分示例2.4.1、子网划分案例 —— A…...
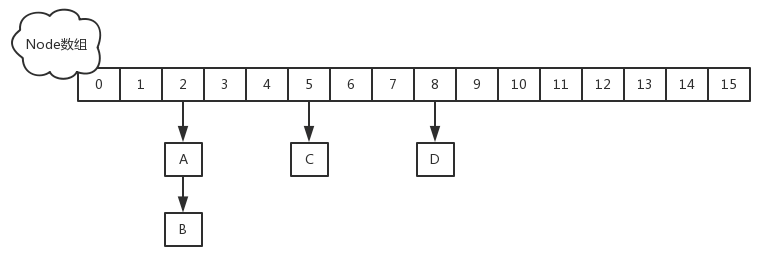
HashMap 二十一问
1:HashMap 的数据结构? A:哈希表结构(链表散列:数组链表)实现,结合数组和链表的优点。当链表长度超过 8 时,链表转换为红黑树。transient Node<K,V>[] table; 2:…...
什么是Selenium?使用Selenium进行自动化测试
什么是 Selenium? Selenium 是一种开源工具,用于在 Web 浏览器上执行自动化测试(使用任何 Web 浏览器进行 Web 应用程序测试)。 等等,先别激动,让我再次重申一下,Selenium 仅可以测试We…...
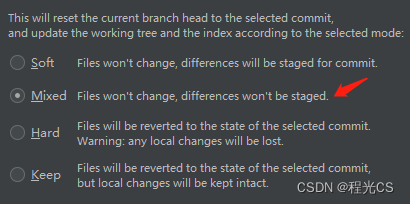
解决“先commit再pull”造成的git冲突
一、问题场景 在分支上修改了代码然后commit(没有push),此时再git pull,拉下了别人的修改,但是报错无法merge 二、解决步骤 1.在idea下方工具栏选择git -> log,可以看到版本变化链表,右键…...
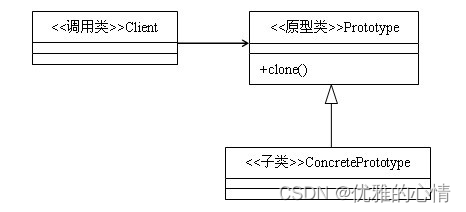
JAVA设计模式----原型设计模式
文章目录 一、简介二、实现方式三、原型模式的注意事项浅拷贝与深拷贝浅拷贝深拷贝一、简介 定义:用原型实例指定创建对象的种类,并通过拷贝这些原型创建新的对象。 类型:创建类模式 类图: 原型模式主要用于对象的复制,它的核心是就是类图中的原型类Prototype。Protot…...

树·c++
树(Tree) 是一种非线性的数据结构,它由若干个 节点(Node) 组成,并通过 边(Edge) 相互连接。树的结构类似于现实中的树,其中 根节点(Root Node) 位…...
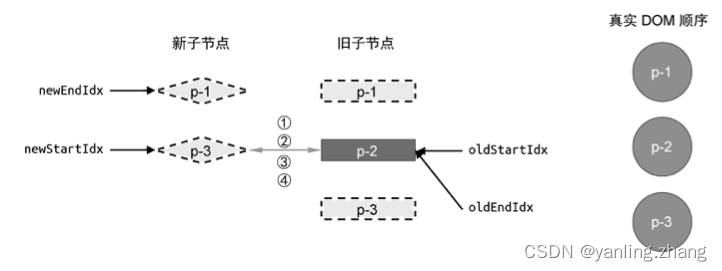
vuejs 设计与实现 - 双端diff算法
我们介绍了简单 Diff 算法的实现原理。简单 Diff 算法利用虚拟节点的 key 属性,尽可能地复用 DOM元素,并通过移动 DOM的方式来完成更新,从而减少不断地创建和销毁 DOM 元素带来的性能开销。但是,简单 Diff 算法仍然存在很多缺陷&a…...
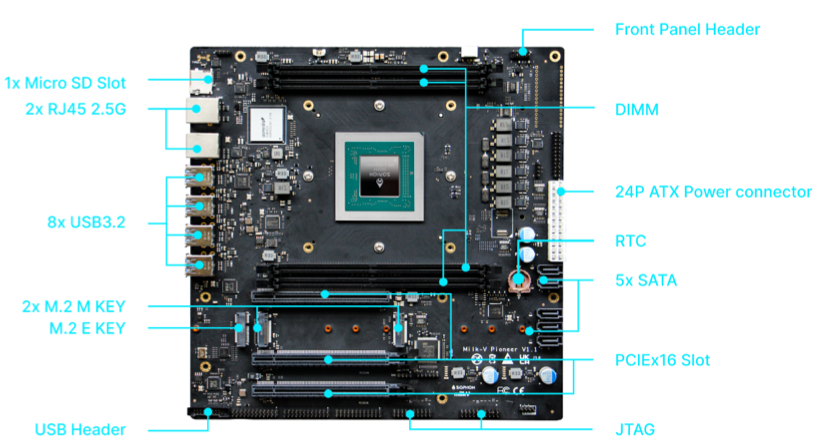
RISC-V在快速发展的处理器生态系统中找到立足点
原文:RISC-V Finds Its Foothold in a Rapidly Evolving Processor Ecosystem 作者:Agam Shah 转载自:https://thenewstack.io/risc-v-finds-its-foothold-in-a-rapidly-evolving-processor-ecosystem/ 以下是正文 But the open source pr…...

面试题02
这里写目录标题 主存储器和CPU之间增加Cache的目的是?判断一个char变量c1是否为小写字母循环链表顺序存储的线性表,访问结点和增加删除结点的时间复杂度请列举你所知道的c/c++ 语言中引入性能开销或阻碍编译优化的语言特性,并尝试说明对应的解决办法请列举CPU cache对编程开…...
第六章 SpringBoot注解 @ConditionalOnBean
满足条件的则进行组件的注入 Configuration(proxyBeanMethods true) //告诉SpringBoot这是一个配置类 配置文件 ConditionalOnBean(name "tom") public class MyConfig {Bean("tom")public Pet tom(){return new Pet("tomPet");}/*** 外部无论…...

MySQL8的下载与安装-MySQL8知识详解
本文的内容是mysql8的下载与安装。主要讲的是两点:从官方网站下载MySQL8安装和从集成环境安装MySQL8。 一、从官方网站下载MySQL8.0安装 MySQL8.0官方下载地址是:(见图) 官方正式版的最新版本是8.0.34,也推出了创新版…...

ATF(TF-A)安全通告 TFV-9 (CVE-2022-23960)
ATF(TF-A)安全通告汇总 目录 一、ATF(TF-A)安全通告 TFV-9 (CVE-2022-23960) 二、CVE-2022-23960 一、ATF(TF-A)安全通告 TFV-9 (CVE-2022-23960) Title TF-A披露通过分支预测目标重用(branch prediction target reuse)引发的前瞻执行处理器漏洞 CV…...

终极指南:如何让老Mac重获新生,体验最新macOS系统
终极指南:如何让老Mac重获新生,体验最新macOS系统 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 你是否有一台被苹果"抛弃"…...

marksman:基于本地向量数据库的智能书签管理工具实践
1. 项目概述:一个为开发者量身定制的“智能书签” 如果你和我一样,每天要在浏览器里打开几十个标签页,收藏夹里塞满了各种技术文档、API参考、Stack Overflow的解决方案,那么你肯定也深受“信息过载”和“知识碎片化”的困扰。一个…...
)
别再踩坑了!Avue Dynamic子表单自定义操作列和序号列的正确姿势(slot: true + cell: false避坑指南)
Avue Dynamic子表单深度实践:插槽配置与自定义操作列全解析 在Vue生态的中后台开发领域,Avue作为基于Element UI的增强框架,其Dynamic子表单功能因其动态数据处理的便捷性而广受欢迎。但当开发者需要实现高度自定义的交互界面时,特…...

如何用Stream-rec打造你的专属直播录制系统:多平台自动录制终极指南
如何用Stream-rec打造你的专属直播录制系统:多平台自动录制终极指南 【免费下载链接】stream-rec Automatic streaming record tool. Live stream and bullet comments recorder. 虎牙/抖音/斗鱼/Twitch/PandaTV/微博直播,弹幕自动录制 项目地址: http…...

Ollama GUI深度解析:构建现代本地大语言模型交互界面的架构实践指南
Ollama GUI深度解析:构建现代本地大语言模型交互界面的架构实践指南 【免费下载链接】ollama-gui A Web Interface for chatting with your local LLMs via the ollama API 项目地址: https://gitcode.com/gh_mirrors/ol/ollama-gui Ollama GUI是一款基于Vue…...

LSTM序列预测模型详解与应用实践
1. 序列预测与循环神经网络基础序列预测是机器学习中一个极具挑战性的领域,它要求模型能够理解并预测数据点之间的时序关系。想象一下,你正在观看一部悬疑电影,随着剧情推进,你不断根据之前的线索猜测接下来会发生什么——这正是序…...
)
iOS开发实战:用AV Foundation从零封装一个可复用的视频播放器组件(Swift版)
iOS开发实战:用AV Foundation从零封装可复用的视频播放器组件(Swift版) 在移动应用开发中,视频播放功能已成为许多App的标配需求。无论是社交平台的短视频浏览、教育类App的课程回放,还是电商平台的产品展示ÿ…...

League Akari:5个维度全面解析英雄联盟终极自动化工具
League Akari:5个维度全面解析英雄联盟终极自动化工具 【免费下载链接】League-Toolkit An all-in-one toolkit for LeagueClient. Gathering power 🚀. 项目地址: https://gitcode.com/gh_mirrors/le/League-Toolkit 还在为排位选人犹豫不决而错…...

AI Agent Harness与区块链结合:可信执行
AI Agent Harness与区块链结合:构建下一代可信AI执行体系 引言 背景介绍 2023年以来,以AutoGPT、GPTs为代表的AI Agent技术爆发,正在重新定义软件的交互形态:不同于传统软件的固定逻辑,AI Agent可以自主感知环境、调用工具、制定决策、完成复杂任务,被行业普遍认为是继…...

别再傻傻分不清了!一文搞懂ROM、PROM、EPROM、EEPROM的区别与选型
嵌入式存储芯片选型指南:ROM家族技术解析与实战应用 在嵌入式系统设计中,数据存储方案的选择往往决定着产品的可靠性、成本和生产效率。面对琳琅满目的ROM、PROM、EPROM和EEPROM芯片,不少工程师在项目初期都会陷入选择困境——究竟哪种技术最…...