手眼标定眼在手上
1、为什么要用手眼标定
参考手眼标定特别是眼在手上在网上的文章很多,但很多在实际中调试不通。在定位时候,往往希望相机能返回的是机械的世界坐标,而不是相机的的图像坐标。从而间接计算出相机坐标系与机械坐标世界坐标转换矩阵,以镜头中心为参考点。
2、手眼标定的实现
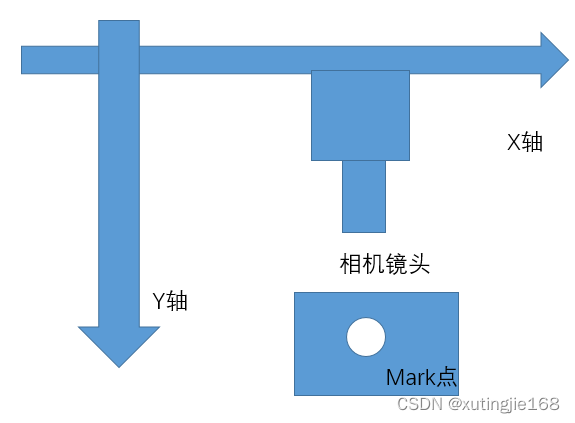
stp1:移动模组3*3 ,3行3列,分别模组走一个点(Bx,By),相机拍照获取一张图片Mark的坐标(Ax,Ay)的坐标。
*已知相机的9个点
Ax:=[825.505,1116.06,1405.89,830.793,1121.89,1412.44,836.321,1127.35,1417.95]
Ay:=[1413.87,1419.22,1423.91,1122.52,1128.24,1133.46,830.913,836.734,842.063]
*分别对应相机Mark点的模组获取的坐标
Bx:=[-152.7289,-153.7289,-154.7289,-152.7289,-153.7289,-154.7289,-152.7289,-153.7289,-154.7289]
By:=[-92.8409,-92.8409,-92.8409,-93.8409,-93.8409,-93.8409,-94.8409,-94.8409,-94.8409]
stp2:仿射变换求出仿射矩阵HomMat2D
vector_to_hom_mat2d ( Ax, Ay, Bx, By,HomMat2D)
stp3:求世界坐标
手眼标定,以相机中心
1、求出base,以图像dqx1, dqy1(0,0)为参考点
affine_trans_point_2d (HomMat2D, 0, 0, dqx1, dqy1)
2、求出图像Mark坐标(pixx:=1417.95,pixy:=842.063)到图像中心点坐标的世界坐标(标定时候的)中心点(1024,1224)
dpix:=1024-pixx
dpiy:=1224-pixy
affine_trans_point_2d (HomMat2D, dpix, dpiy, dqx, dqy)
3、求出偏差Offset dqx2,dqy2
dqx2:=dqx-dqx1
dqy2:=dqy-dqy1
4、模组获取反馈的运动控制的坐标realx,raaly,求出镜头中心实际坐标realx3,realy3
realx3:=realx+dqx2
realy3:=raaly+dqy2
read_image(Image, 'printer_chip/printer_chip_01')
*已知A坐标系的9个点
Ax:=[825.505,1116.06,1405.89,830.793,1121.89,1412.44,836.321,1127.35,1417.95]
Ay:=[1413.87,1419.22,1423.91,1122.52,1128.24,1133.46,830.913,836.734,842.063]*待识别的B坐标点,和上面的A坐标系点一一对应
Bx:=[-152.7289,-153.7289,-154.7289,-152.7289,-153.7289,-154.7289,-152.7289,-153.7289,-154.7289]
By:=[-92.8409,-92.8409,-92.8409,-93.8409,-93.8409,-93.8409,-94.8409,-94.8409,-94.8409]
* for Index := 1 to 9 by 1
* dev_display (Image)* 以下过程为在B坐标系找A中的9个点
* draw_rectangle1 (200000, Row1, Column1, Row2, Column2)
* gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
* reduce_domain (Image, Rectangle, ImageReduced)
* binary_threshold (ImageReduced, Region, 'max_separability', 'light', UsedThreshold)
* connection (Region, ConnectedRegions)
* select_shape (ConnectedRegions, SelectedRegions, 'roundness', 'and', 0.7, 1)
* select_shape (SelectedRegions, SelectedRegion2, 'rb', 'and', 32, 100)
* fill_up (SelectedRegions, RegionFillUp)*找到了B坐标系的点(Row,Column)
* area_center (RegionFillUp, Area, Row, Column)
* Bx:=[Bx,Column]
* By:=[By,Row]
* endfor
*得到目标变换矩阵HomMat2Dvector_to_hom_mat2d ( Ax, Ay, Bx, By,HomMat2D)vector_to_hom_mat2d ( Bx, By, Ax, Ay,HomMat2DINV)********new realx raaly机械反馈的坐标
realx:=-154.7289
raaly:=-94.8409
pixx:=1417.95
pixy:=842.063
dpix:=1024-pixx
dpiy:=1224-pixy
affine_trans_point_2d (HomMat2D, dpix, dpiy, dqx, dqy)
affine_trans_point_2d (HomMat2D, 0, 0, dqx1, dqy1)dqx2:=dqx-dqx1
dqy2:=dqy-dqy1realx3:=realx+dqx2
realy3:=raaly+dqy2相关文章:
手眼标定眼在手上
1、为什么要用手眼标定 参考手眼标定特别是眼在手上在网上的文章很多,但很多在实际中调试不通。在定位时候,往往希望相机能返回的是机械的世界坐标,而不是相机的的图像坐标。从而间接计算出相机坐标系与机械坐标世界坐标转换矩阵,…...

【数据结构】初始二叉树
满二叉树 每个结点都有左右子树的二叉树。 完全二叉树 从上到下、从左到右排列,不落下一个结点进行排列的二叉树。 二叉树的性质 第i层最多有2(i-1)个结点深度为k的二叉树最多有 2k-1 个结点因为一颗深度为k的满二叉树的结点有2k-1,即nk-1ÿ…...

创建和使用角色(RHCE)
题目: 创建和使用角色 根据下列要求,在 /home/curtis/ansible/roles 中创建名为 apache 的角色: httpd 软件包已安装,设为在系统启动时启用并启动 防火墙已启用并正在运行,并使用允许访问 Web 服务器的规则 模板文件 i…...
)
Leetcode 583 两个字符串的删除操作(经典)
【问题描述】 给定两个单词 word1 和 word2 ,返回使得 word1 和 word2 相同所需的最小步数。 每步 可以删除任意一个字符串中的一个字符。 示例 1: 输入: word1 "sea", word2 "eat" 输出: 2 解释: 第一步将 "sea" 变为…...

c#实现工厂模式
可以使用以下代码实现C#中的工厂模式: 首先,定义一个接口作为产品的抽象: public interface IProduct {void Operation(); }然后,创建具体的产品类: public class ConcreteProductA : IProduct {public void Operat…...
c#在设计时调试自定义 Windows 窗体控件
private string demoStringValue null; [Browsable(true)] public string DemoString {get{return this.demoStringValue;}set{demoStringValue value;} } 参考链接 在设计时调试自定义控件 - Windows Forms .NET Framework | Microsoft Learnhttps://learn.microsoft.com/z…...

Ajax 笔记(二)—— Ajax 案例
笔记目录 2. Ajax 综合案例2.1 案例一-图书管理2.1.1 渲染列表2.1.2 新增图书2.1.3 删除图书2.1.4 编辑图书 2.2 案例二-背景图的上传和更换2.2.1 上传2.2.2 更换 2.3 案例三-个人信息设置2.3.1 信息渲染2.3.2 头像修改2.2.3 信息修改2.3.4 提示框 Ajax 笔记: Ajax…...

微信小程序隐私协议模板
在 设置 中找到 用户隐私保护 进行更新,如下图: 具体协议补充可参考如下: 为了分辨用户,开发者将在获取你的明示同意后,收集你的微信昵称、头像 为了显示距离,开发者将在获取你的明示同意后,收…...
Three.js WebXR沉浸式渲染简明教程
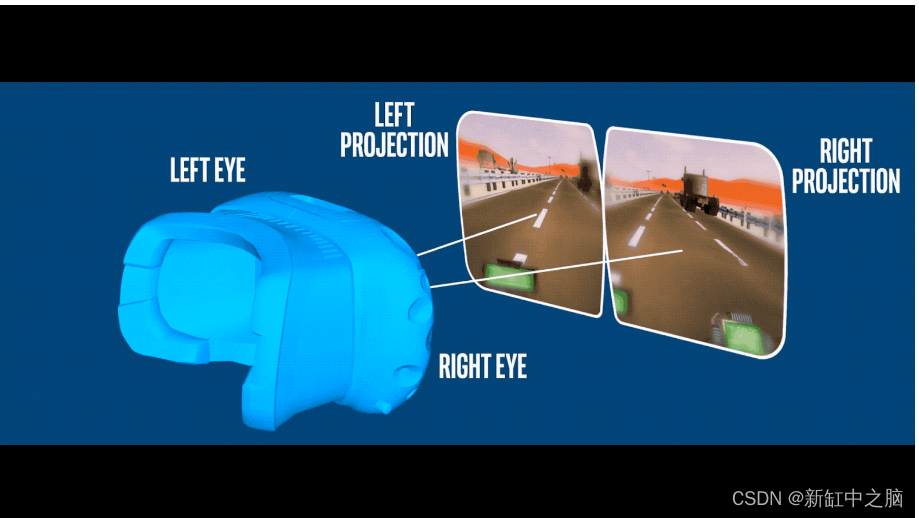
在前面文章中,我们了解了 VR 概念以及它们如何在 WebXR 中映射。 这使你可以考虑想要为用户提供的体验。 在本文中,我们将介绍如何将 WebXR 与 Three.JS 结合使用来创建针对大型异构用户群的沉浸式体验。 警告:WebXR API 仍在完善中…...
flask使用cookie (设置cookie与查看cookie内容)
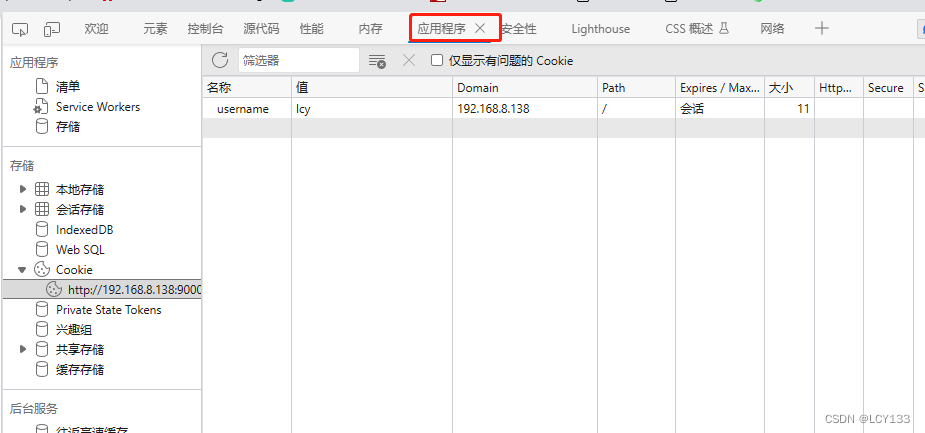
1.flask包cookie的使用 设置cookie app.route(/set_cookie) def set_cookie():resp make_response(Setting cookie)resp.set_cookie(username, John)return resp查看cookie: app.route(/get_cookie) def get_cookie():username request.cookies.get(username)return Welco…...

信息学奥赛一本通——1281:最长上升子序列
文章目录 题目【题目描述】【输入】【输出】【输入样例】【输出样例】 AC代码 题目 【题目描述】 一个数的序列 b i b_i bi,当 b 1 < b 2 < . . . < b S b_1<b_2<...<b_S b1<b2<...<bS的时候,我们称这个序列是上升…...
vue3+antv x6自定义节点样式
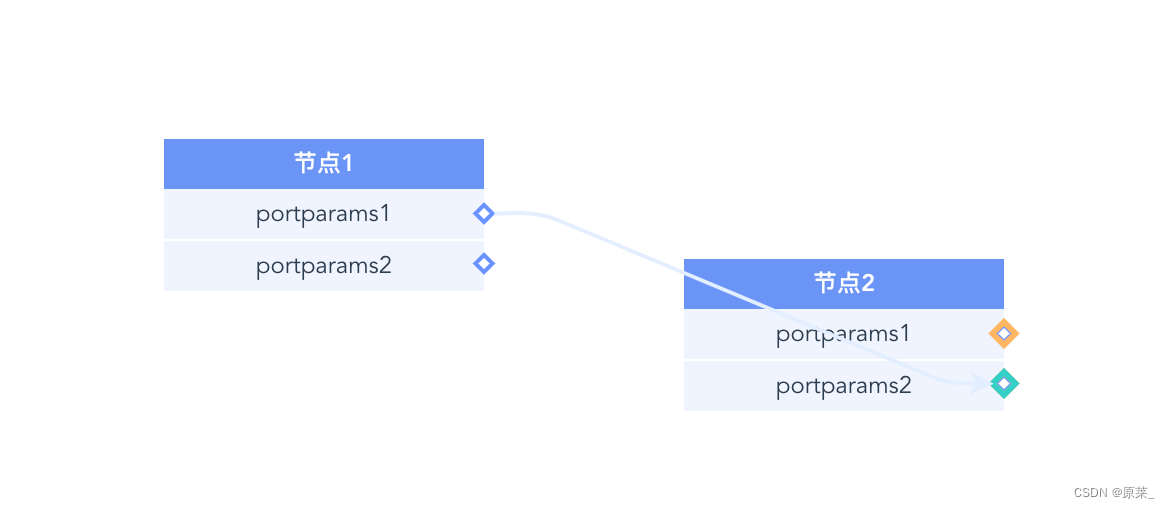
先大致定下节点样式,需要展示标题,输入/输出连接桩, 参考样子大概是 https://x6.antv.antgroup.com/examples/showcase/practices#class 这是根据antv x6配置 非自定义节点 图表案例 结果 数据格式大概是 nodes:[{title:鸟,id:node1,ports…...
Arcgis中直接通过sde更新sqlserver空间数据库失败
问题 背景 不知道有没有人经历过这样一个情况,我们直接在Arcgis中通过sde更新serserver数据库会失败,就是虽然在sde更新sqlserver数据库,但是在Navicat中通过sql语句来查询,发现数据并没有更新,如:上图中,更新数据库后,第一张图是sde打开的sqlserver数据库,它的数据库…...

使用gewe框架进行微信群组管理(一)
友情链接:geweapi.com 点击访问即可。 管理员操作 小提示: 添加、删除、转让多个wxid时仅限于添加/删除管理员,1添加 2删除 3转让 请求URL: http://域名地址/api/group/admin 请求方式: POST 请求头:…...
【Linux】UDP协议——传输层
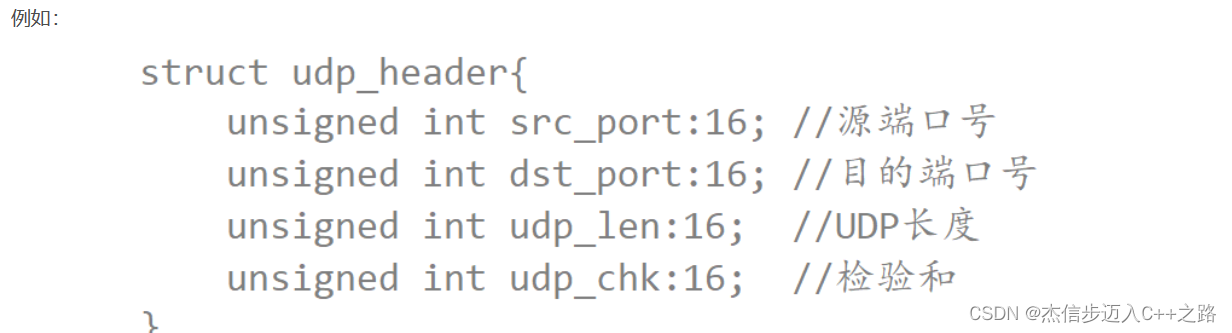
目录 传输层 再谈端口号 端口号范围划分 认识知名端口号 两个问题 netstat与iostat pidof UDP协议 UDP协议格式 UDP协议的特点 面向数据报 UDP的缓冲区 UDP使用注意事项 基于UDP的应用层协议 传输层 在学习HTTP等应用层协议时,为了便于理解ÿ…...

【Linux进阶之路】进程(上)
文章目录 前言一、操作系统加载过程二、进程1.基本概念2.基本信息①运行并观察进程②创建子进程③僵尸与孤儿进程(父子进程衍生出来的问题)1. 僵尸进程(Zombie状态)2. 孤儿进程 3.基本状态①操作系统的状态(统一&#…...
爬虫018_urllib库_cookie反爬_post请求百度翻译获取百分翻译内容_以及详细翻译内容---python工作笔记037
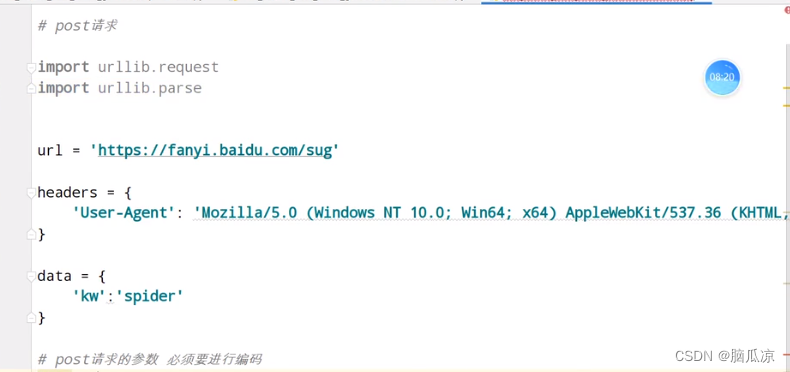
然后我们来看如何用urllib发送post请求,这里我们 用百度翻译为例 我们翻译一个spider,然后我们看请求,可以看到有很多 找到sug这个 可以看到这里的form data,就是post请求体中的内容 然后我们点击preview其实就是 返回的实际内容 然后请求方式用的post 然后我们把上面的信息…...

【Nginx】Nginx网站服务
国外主流还是使用apache;国内现在主流是nginx(并发能力强,相对稳定) nginx:高新能、轻量级的web服务软件 特点: 1.稳定性高(没apache稳); 2.系统资源消耗比较低…...

go语言从0基础到安全项目开发实战
一.环境搭建并helloworld 搭建环境比较简单 1.1安装SDK 到以下链接下 Go下载 - Go语言中文网 - Golang中文社区 下载windows版本64位zip包 https://studygolang.com/dl/golang/go1.20.7.windows-amd64.zip 1.2配置环境变量 不配置的话就只能在bin目录下才能运行go命令 …...
Kubernetes Service 工作原理
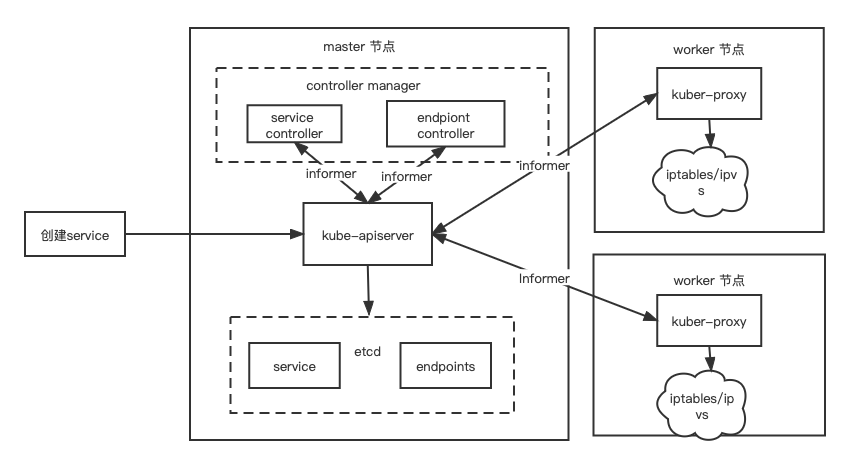
本文介绍了 Kubernetes Service 的概念、原理和具体使用。 作者:沈亚军 爱可生研发团队成员,负责公司 DMP 产品的后端开发,爱好太广,三天三夜都说不完,低调低调… 本文来源:原创投稿 爱可生开源社区出品&am…...

终极指南:如何用WarcraftHelper让魔兽争霸III在现代电脑上焕发新生!
终极指南:如何用WarcraftHelper让魔兽争霸III在现代电脑上焕发新生! 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为经典…...

BetterJoy终极指南:让Switch手柄在PC上完美工作的免费解决方案
BetterJoy终极指南:让Switch手柄在PC上完美工作的免费解决方案 【免费下载链接】BetterJoy Allows the Nintendo Switch Pro Controller, Joycons and SNES controller to be used with CEMU, Citra, Dolphin, Yuzu and as generic XInput 项目地址: https://gitc…...

为什么选择Starward?终极米哈游游戏启动器完整使用指南
为什么选择Starward?终极米哈游游戏启动器完整使用指南 【免费下载链接】Starward Game Launcher for miHoYo - 米家游戏启动器 项目地址: https://gitcode.com/gh_mirrors/st/Starward 你是否厌倦了官方启动器的缓慢速度和功能单一?Starward作为…...

Hugging Face Skills:为AI编码助手注入MLOps技能,提升开发效率
1. 项目概述:为你的AI编码助手注入Hugging Face生态之力如果你和我一样,每天都在和AI编码助手(比如Cursor、Claude Code、Codex)打交道,那你肯定遇到过这样的场景:想让助手帮你从Hugging Face Hub下载一个模…...

Ostrakon-VL-8B功能全解析:图文对话、合规检查、库存盘点一网打尽
Ostrakon-VL-8B功能全解析:图文对话、合规检查、库存盘点一网打尽 1. 零售行业的AI革命者 走进任何一家现代零售门店,你会看到货架上整齐排列的商品、忙碌的员工和川流不息的顾客。但在这看似平常的场景背后,隐藏着无数需要检查的细节&…...

机器学习基础:从数据构成到模型评估全解析
1. 机器学习基础概念解析在开始任何机器学习项目之前,我们需要先建立对基础概念的清晰理解。就像建筑师需要先熟悉砖瓦和钢筋的特性一样,数据科学家也必须掌握这些核心术语。1.1 数据的基本构成机器学习算法从数据中学习模式,因此理解数据的组…...
,让你的老显卡焕发新生)
无损缩放小黄鸭下载使用教程(Lossless Scaling),让你的老显卡焕发新生
Lossless Scaling(小黄鸭)是一款Steam上的AI插帧与无损缩放工具,通过LSFG 3.1算法为窗口化或无边框程序补帧,可将30帧画面提升至60帧甚至更高,并支持多种缩放算法锐化低分辨率画面,很适合低配硬件。 软件最…...
)
【紧急预警】VSCode 2026默认配置正悄悄吞噬你62%可用内存!3步强制启用ZRAM压缩引擎(附patch脚本)
更多请点击: https://intelliparadigm.com 第一章:VSCode 2026内存占用异常的根源确认与影响评估 VSCode 2026(代号“Nebula”)引入了基于 WebAssembly 的扩展沙箱与实时语义索引服务,显著提升了大型代码库的智能感知…...

别瞎挖!7 个合法挖洞变现途径,新手 0 基础也能赚到第一笔奖金
别再瞎找漏洞!7 个「合法变现」的挖洞途径,新手也能从 0 赚到第一笔奖金 提到漏洞挖掘,很多人觉得是 “大神专属”—— 要么找不到合法渠道,要么担心没技术赚不到钱,最后只能在网上瞎逛浪费时间。但其实从新手到高阶&…...
