YOLOv5、YOLOv8改进: GSConv+Slim Neck
论文题目:Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicles
论文:https://arxiv.org/abs/2206.02424
代码:https://github.com/AlanLi1997/Slim-neck-by-GSConv
在计算机视觉领域,目标检测是一项复杂而具有挑战性的任务,特别是在车载边缘计算平台上,实时性要求较高,而且传统的大型模型往往难以满足这一需求。另一方面,基于大量深度可分离卷积层构建的轻量级模型可能无法保持足够的准确性。为了解决这些问题,本文提出了一种名为GSConv的新方法,以在降低模型复杂性的同时保持准确性。GSConv不仅可以平衡模型的速度和准确性,还引入了一种名为Slim-Neck的设计范式,以在计算成本方面实现更高的效益。实验结果表明,与原始网络相比,本文方法在性能上取得了显著的提升,例如在Tesla T4上以约100FPS的速度获得了70.9%的mAP0.5,显示了其在目标检测领域的优越性。
目标检测在无人驾驶汽车中具有重要的意义,它是使车辆能够感知周围环境的基本能力。当前,基于深度学习的目标检测算法在这一领域中占据主导地位。这些算法在检测阶段通常可分为两种类型:一阶段检测和两阶段检测。两阶段检测器在小目标的检测方面表现更佳,通过稀疏检测的原理能够实现更高的平均精度(mAP),但其速度较慢。而一阶段检测器虽然在小目标的检测和定位方面不如两阶段检测器准确,但其速度更快,这在工业应用中具有重要意义。
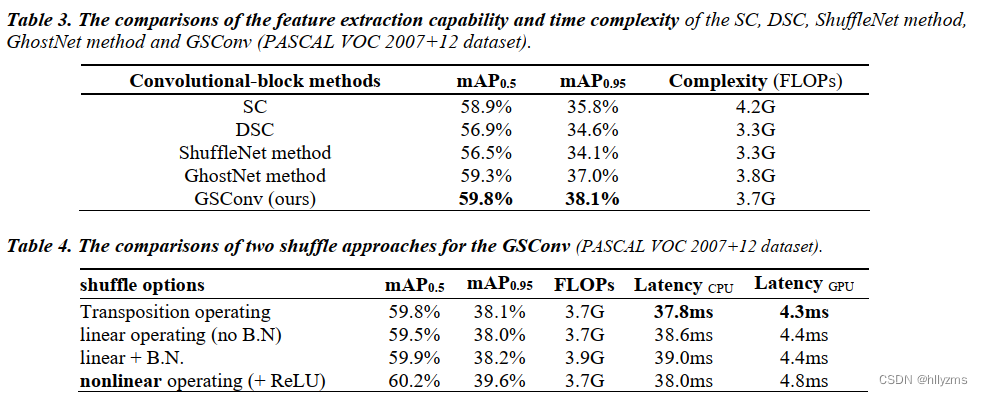
尽管人们常常认为模型的非线性能力与神经元的数量成正比,但这并不是完整的理解。事实上,生物大脑在信息处理方面具有强大的能力和低能耗,远超计算机。因此,简单地不断增加模型参数的数量并不能直接带来强大的性能。在目前阶段,采用轻量级设计可以有效地降低计算成本。这一设计思路主要通过使用深度可分离卷积(DSC)操作来减少参数数量和浮点运算数(FLOPs),从而取得显著效果。
1.


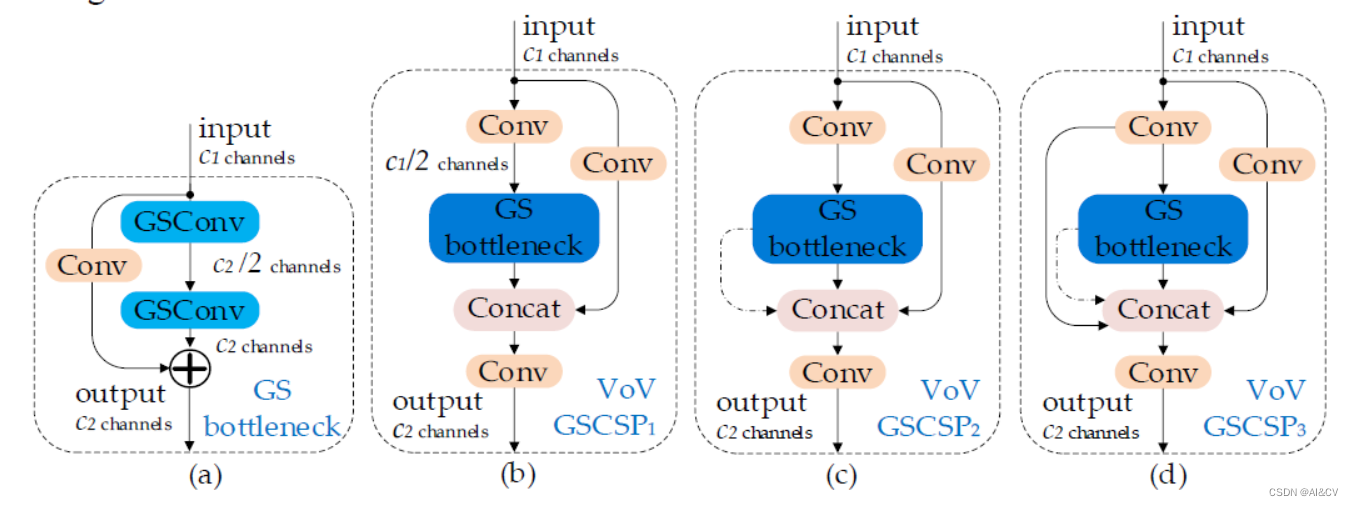
2 Slim-Neck
采用 GSConv 方法的 Slim-Neck 可缓解 DSC 缺陷对模型的负面影响,并充分利用深度可分离卷积 DSC 的优势。
Slim-Neck结合Yolov5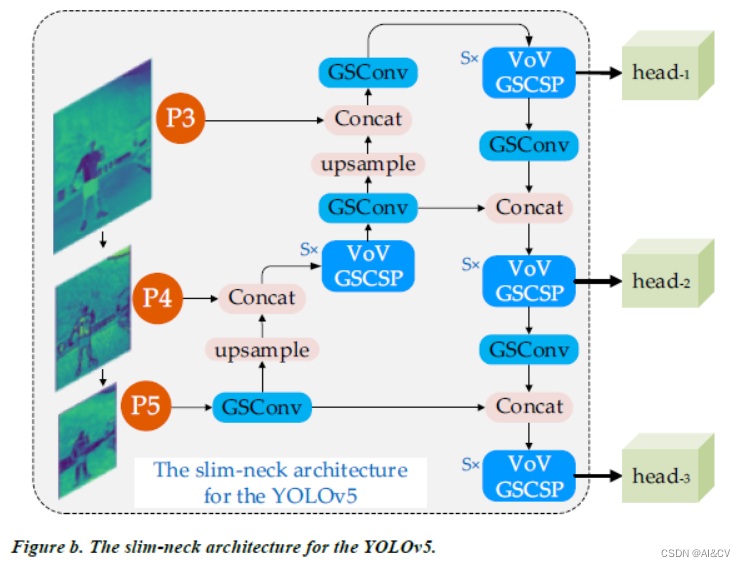
---------------------------------------分割线----------------------------------------------
下面介绍一下如何在自己的网络中改进
GSConv+Slim Neck 加入common.py
###################### slim-neck-by-gsconv #### start ###############################class GSConv(nn.Module):# GSConv https://github.com/AlanLi1997/slim-neck-by-gsconvdef __init__(self, c1, c2, k=1, s=1, g=1, act=True):super().__init__()c_ = c2 // 2self.cv1 = Conv(c1, c_, k, s, None, g, 1, act)self.cv2 = Conv(c_, c_, 5, 1, None, c_, 1 , act)def forward(self, x):x1 = self.cv1(x)x2 = torch.cat((x1, self.cv2(x1)), 1)# shuffle# y = x2.reshape(x2.shape[0], 2, x2.shape[1] // 2, x2.shape[2], x2.shape[3])# y = y.permute(0, 2, 1, 3, 4)# return y.reshape(y.shape[0], -1, y.shape[3], y.shape[4])b, n, h, w = x2.data.size()b_n = b * n // 2y = x2.reshape(b_n, 2, h * w)y = y.permute(1, 0, 2)y = y.reshape(2, -1, n // 2, h, w)return torch.cat((y[0], y[1]), 1)class GSConvns(GSConv):# GSConv with a normative-shuffle https://github.com/AlanLi1997/slim-neck-by-gsconvdef __init__(self, c1, c2, k=1, s=1, g=1, act=True):super().__init__(c1, c2, k=1, s=1, g=1, act=True)c_ = c2 // 2self.shuf = nn.Conv2d(c_ * 2, c2, 1, 1, 0, bias=False)def forward(self, x):x1 = self.cv1(x)x2 = torch.cat((x1, self.cv2(x1)), 1)# normative-shuffle, TRT supportedreturn nn.ReLU(self.shuf(x2))class GSBottleneck(nn.Module):# GS Bottleneck https://github.com/AlanLi1997/slim-neck-by-gsconvdef __init__(self, c1, c2, k=3, s=1, e=0.5):super().__init__()c_ = int(c2*e)# for lightingself.conv_lighting = nn.Sequential(GSConv(c1, c_, 1, 1),GSConv(c_, c2, 3, 1, act=False))self.shortcut = Conv(c1, c2, 1, 1, act=False)def forward(self, x):return self.conv_lighting(x) + self.shortcut(x)class DWConv(Conv):# Depth-wise convolution classdef __init__(self, c1, c2, k=1, s=1, act=True): # ch_in, ch_out, kernel, stride, padding, groupssuper().__init__(c1, c2, k, s, g=math.gcd(c1, c2), act=act)class GSBottleneckC(GSBottleneck):# cheap GS Bottleneck https://github.com/AlanLi1997/slim-neck-by-gsconvdef __init__(self, c1, c2, k=3, s=1):super().__init__(c1, c2, k, s)self.shortcut = DWConv(c1, c2, k, s, act=False)class VoVGSCSP(nn.Module):# VoVGSCSP module with GSBottleneckdef __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):super().__init__()c_ = int(c2 * e) # hidden channelsself.cv1 = Conv(c1, c_, 1, 1)self.cv2 = Conv(c1, c_, 1, 1)# self.gc1 = GSConv(c_, c_, 1, 1)# self.gc2 = GSConv(c_, c_, 1, 1)# self.gsb = GSBottleneck(c_, c_, 1, 1)self.gsb = nn.Sequential(*(GSBottleneck(c_, c_, e=1.0) for _ in range(n)))self.res = Conv(c_, c_, 3, 1, act=False)self.cv3 = Conv(2 * c_, c2, 1) #def forward(self, x):x1 = self.gsb(self.cv1(x))y = self.cv2(x)return self.cv3(torch.cat((y, x1), dim=1))class VoVGSCSPC(VoVGSCSP):# cheap VoVGSCSP module with GSBottleneckdef __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):super().__init__(c1, c2)c_ = int(c2 * 0.5) # hidden channelsself.gsb = GSBottleneckC(c_, c_, 1, 1)###################### slim-neck-by-gsconv #### end ###############################
GSConv+Slim Neck 加入yolo.py
args = [c1, c2, *args[1:]]if m in {BottleneckCSP, C3, C3TR, CNeB, C3Ghost, C3x, C2f, VoVGSCSP, VoVGSCSPC}:args.insert(2, n) # number of repeatsn = 1
if m in {Conv, GhostConv, Bottleneck, GhostBottleneck, SPP, SPPF, DWConv, MixConv2d, Focus, CrossConv,BottleneckCSP, C3, C3TR, C3SPP, C3Ghost, CNeB, nn.ConvTranspose2d, DWConvTranspose2d, C3x, C2f,CARAFE, GSConv, VoVGSCSP, VoVGSCSPC}:
配置 yaml文件
GSConv-yolov5s.yaml
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicle
# Parameters
nc: 2 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, GSConv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, GSConv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, GSConv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, GSConv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
slimneck-yolov5s.yaml
# YOLOv5 🚀 by Ultralytics, GPL-3.0 license
# Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicle
# Parameters
nc: 2 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOv5 v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOv5 v6.0 head
head:[[-1, 1, GSConv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, VoVGSCSP, [512, False]], # 13[-1, 1, GSConv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, VoVGSCSP, [256, False]], # 17 (P3/8-small)[-1, 1, GSConv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, VoVGSCSP, [512, False]], # 20 (P4/16-medium)[-1, 1, GSConv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, VoVGSCSP, [1024, False]], # 23 (P5/32-large)[[17, 20, 23], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]
这两种改法在缺陷检测数据集上亲测有效
相关文章:
YOLOv5、YOLOv8改进: GSConv+Slim Neck
论文题目:Slim-neck by GSConv: A better design paradigm of detector architectures for autonomous vehicles 论文:https://arxiv.org/abs/2206.02424 代码:https://github.com/AlanLi1997/Slim-neck-by-GSConv 在计算机视觉领域&#x…...

重发布选路问题
一、思路 ; 1.增加不优选路开销解决选路不佳问题 2.用增加开销的方式使R1 不将ASBR传的R7传给另一台ASBR解决R1、R2、R3、R4pingR7环回环路 二、操作 ------IP地址配置如图 1.ospf及rip的宣告 rip: [r1]rip 1 [r1-rip-1]version 2 [r1-rip-1]netw…...

LinearAlgebraMIT_9_LinearIndependence/SpanningASpace/Basis/Dimension
这节课我们主要学习一下(Linear Independence)线性无关,(spanning a space)生成空间,(basis)基和(dimension)维度。同时我们要注意这四个很重要的基本概念的描述对象,我们会说向量组线性无关,由一个向量组生成的空间,子…...

Redission 解锁异常:attempt to unlock lock, not locked by current thread by node id
标题:解锁异常:Redission中的"attempt to unlock lock, not locked by current thread by node id"问题分析与解决方案 在分布式系统中,锁是常用的同步机制,用于保护共享资源,避免并发冲突。Redission是一个…...

AIGC技术揭秘:探索火热背后的原因与案例
文章目录 什么是AIGC技术?为何AIGC技术如此火热?1. 提高效率与创造力的完美结合2. 拓展应用领域,创造商业价值3. 推动技术创新和发展 AIGC技术案例解析1. 艺术创作:生成独特的艺术作品2. 内容创作:实时生成各类内容3. …...
【Linux】总结1-命令工具
文章目录 基础指令shell命令以及运行原理Linux权限粘滞位工具 基础指令 ls、pwd、touch、mkdir、netstat、cp、mv、cd、tar、zip、unzip、grep、pstack、ps、rm、cat、more、less、head、tail、find、ulimit -a、clear、whoami、man touch:创建文件,也包…...

Git远程仓库
Git远程仓库 推送拉取git fetchgit pull 克隆 推送 Git是分布式版本控制系统,同一个Git仓库,可以分布到不同的机器上。那要怎么实现这种分布呢?我们可以找一台电脑充当服务器,也就是扮演远程仓库的角色,一直都处于开机…...
Redis缓存设计
缓存能够有效地加速应用的读写速度,同时也可以降低后端负载,对日常应用的开发至关重要。但是将缓存加入应用架构后也会带来一些问题,本文将针对这些问题介绍缓存使用技巧和设计方案。 1缓存的收益和成本 下图左侧为客户端直接调用存储层的架…...
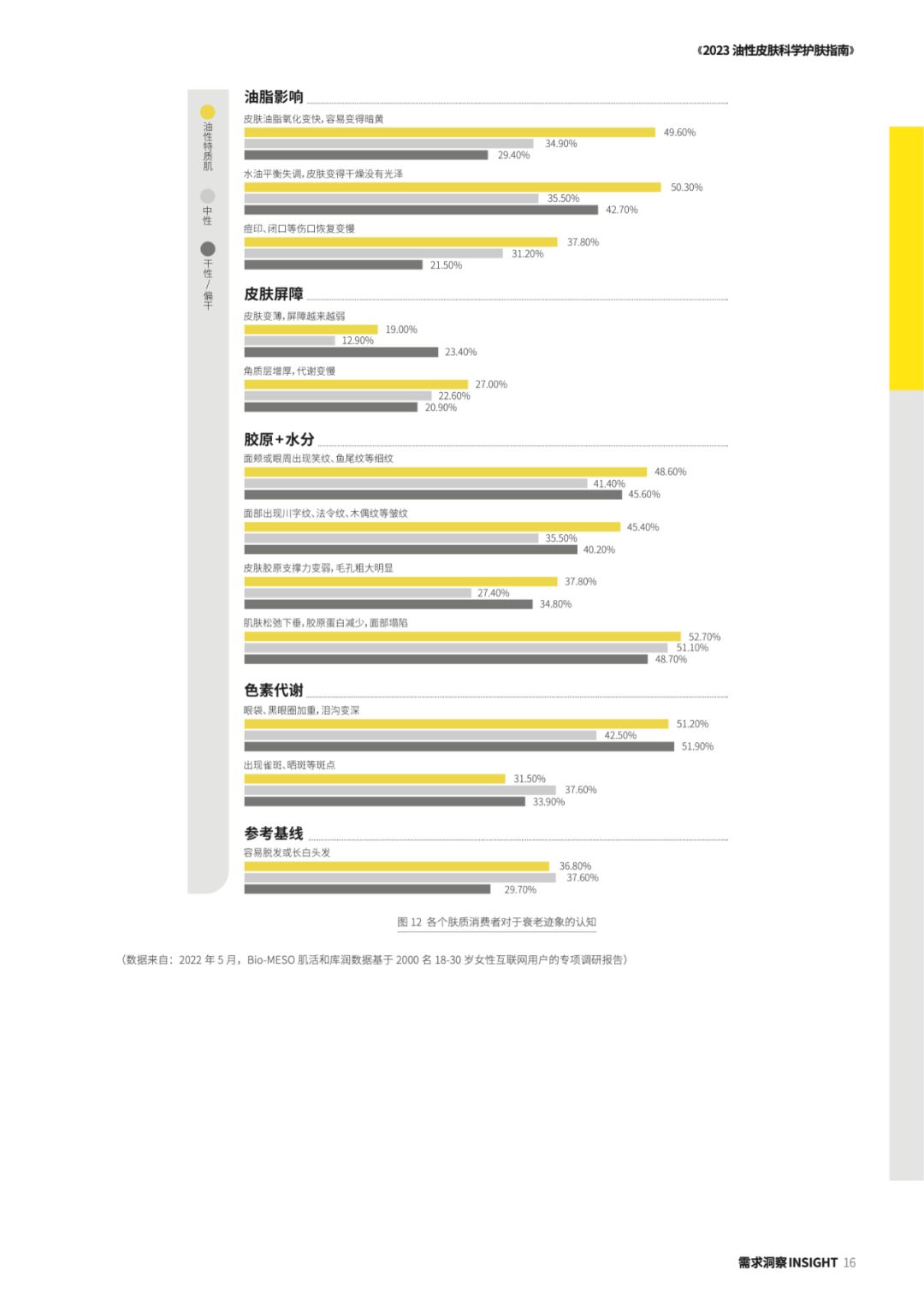
华熙生物肌活:2023年版Bio-MESO肌活油性皮肤科学护肤指南
关于报告的所有内容,公众【营销人星球】获取下载查看 核心观点 以悦己和尝鲜为消费动机的他们,已迅速崛起成为护肤行业的焦点人群。而在新生代护肤议题中,“油性皮肤护理”已经成为一个至关重要的子集。今天,中国新生代人口数量…...
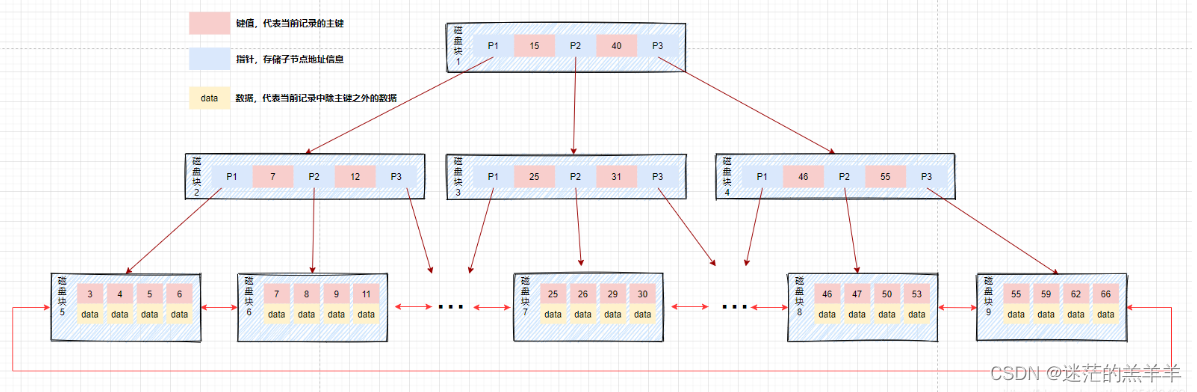
mysql索引介绍
索引可以提升查询速度,会影响where查询,以及order by排序。MySQL索引类型如下: 从索引存储结构划分:B Tree索引、Hash索引、全文索引 从应用层次划分:主键索引、唯一索引、单值索引、复合索引 从索引键值类型划分&am…...
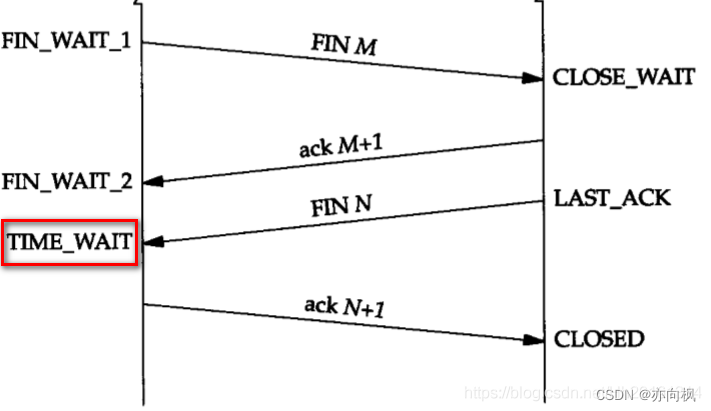
说一下什么是tcp的2MSL,为什么客户端在 TIME-WAIT 状态必须等待 2MSL 的时间?
1.TCP之2MSL 1.1 MSL MSL:Maximum Segment Lifetime报文段最大生存时间,它是任何报文段被丢弃前在网络内的最长时间 1.2为什么存在MSL TCP报文段以IP数据报在网络内传输,而IP数据报则有限制其生存时间的TTL字段,并且TTL的限制是基于跳数 1.3…...

更新spring boot jar包中的BOOT-INF/lib目录下的jar包
更新spring-boot jar包中的BOOT-INF/lib目录下的jar包 场景 需要更新lib目录下某个jar包的配置文件 失败的解决方法 用解压软件依次打开spring-boot jar包(设为a.jar)、BOOT-INF/lib目录下的jar包(设为b.jar),然后修改…...
纯前端 -- html转pdf插件总结
一、html2canvasjsPDF(文字会被截断): 将HTML元素呈现给添加到PDF中的画布对象,不能仅使用jsPDF,需要html2canvas或rasterizeHTML html2canvasjsPDF的具体使用链接 二、html2pdf(内容显示不全文字会被截断…...

数据结构和算法基础
巩固基础,砥砺前行 。 只有不断重复,才能做到超越自己。 能坚持把简单的事情做到极致,也是不容易的。 数据结构和算法 程序 数据结构算法 数据结构是算法的基础 问题1:字符串匹配问题。str1 是否完全包含 str2 1)暴…...

JS二维数组转化为对象
将二维数组转化为对象的形式 转之前的数据: 转之后: const entries new Map([[foo, bar],[baz, 42],[beginNode, 202212151048010054],[beginNode, 202212151048447710],]); console.log(entries)const obj Object.fromEntries(entries);console.lo…...

通过 EPOLL 解决客户端同时连接多服务器的问题
项目需求是 程序上 同时配置了多个服务端 设备 每隔一段时间需要 比如1分钟 连一下服务器看下是否连通 并将结果上报给平台 原来是用线程池来做的 具体大概就是 定时器到了之后 遍历设备列表 找到设备之后 通过 socket连接 发送一个指令 等待服务器返回 用来检查是…...

JavaScript数据结构【进阶】
注:最后有面试挑战,看看自己掌握了吗 文章目录 使用 splice() 添加元素使用 slice() 复制数组元素使用展开运算符复制数组使用展开运算符合并数组使用 indexOf() 检查元素是否存在使用 for 循环遍历数组中的全部元素创建复杂的多维数组将键值对添加到对象…...

jQuery编程学习3(jQuery 其他方法: jQuery 拷贝对象、 jQuery 多库共存、jQuery 插件)
目录 jQuery 其他方法 1. jQuery 拷贝对象 $.extend()方法 2. jQuery 多库共存 问题概述: 客观需求: jQuery 解决方案:(两种方式) 3. jQuery 插件 jQuery 插件常用的网站: jQuery 插件使用步骤&…...
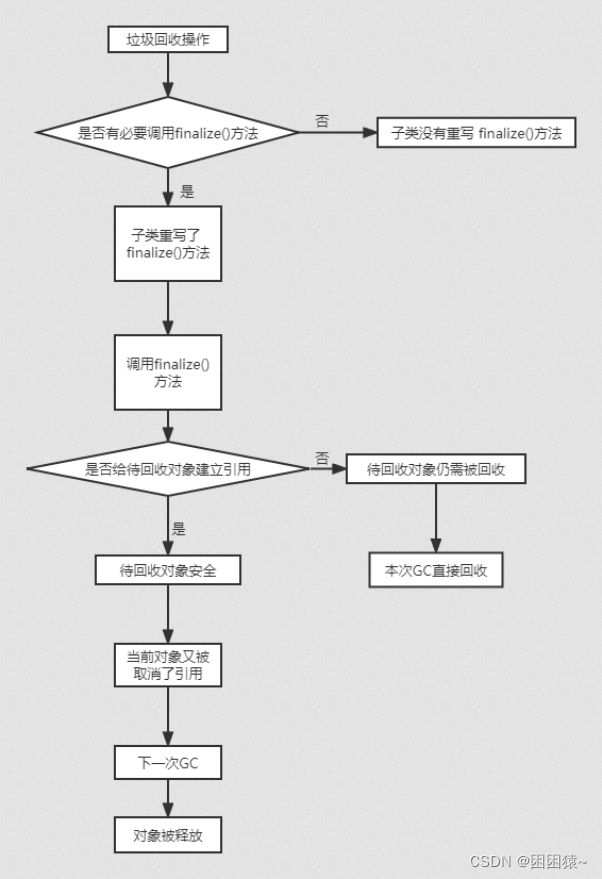
jvm——垃圾回收机制(GC)详解
开始之前有几个GC的基本问题 什么是GC? GC 是 garbage collection 的缩写,意思是垃圾回收——把内存(特别是堆内存)中不再使用的空间释放掉;清理不再使用的对象。 为什么要GC? 堆内存是各个线程共享的空间…...
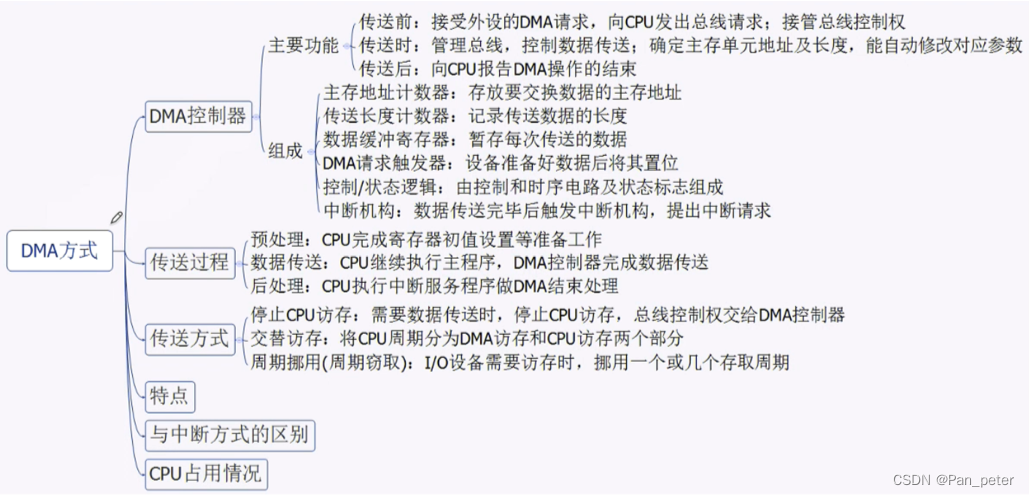
计算机组成原理-笔记-第七章
目录 七、第七章——输入输出系统 1、IO设备与IO控制方式 (1)控制方式(查询,中断,DMA) (2)通道控制 (3)IO系统 (4)总结 2、外设…...

药物警戒系统中,智能体录入不良反应如何从根源上规避人为误差?
摘要: 站在2026年4月的时点回望,药物警戒(Pharmacovigilance, PV)领域正经历一场从“人工辅助”到“智能体托管”的范式转移。传统模式下,不良反应(ADR)录入高度依赖人工对非结构化临床数据的解…...

IDEA项目.gitignore配置避坑指南:从创建项目到后期维护的全流程实践
IDEA项目.gitignore配置避坑指南:从创建项目到后期维护的全流程实践 在团队协作开发中,.gitignore文件就像代码仓库的"守门人",它决定了哪些文件应该被版本控制,哪些应该被拒之门外。但许多开发者往往在项目后期才发现.…...

别只盯着门锁!用ESP32-CAM+Arduino玩转5个超酷的人脸识别小项目
用ESP32-CAM玩转5个创意人脸识别项目:从智能相框到互动艺术 在创客圈里,ESP32-CAM正以惊人的性价比重新定义着嵌入式视觉的可能性。这块不足百元的小板子,搭载了双核处理器、WiFi/蓝牙模块和200万像素摄像头,配合Arduino生态的丰富…...

WarcraftHelper:终极魔兽争霸III兼容性修复指南 [特殊字符]
WarcraftHelper:终极魔兽争霸III兼容性修复指南 🎮 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为经典魔兽争霸III在现…...

AI 间接提示注入攻击成首要安全风险,企业与个人如何应对?
ZDNET 要点总结恶意的网页提示能在未输入信息时利用 AI,间接提示注入已成为大型语言模型(LLM)首要安全风险。别以为 AI 聊天机器人完全安全或无所不知。人工智能(AI)及其对企业和消费者的益处是今年会议和峰会热门话题…...

视觉语义增强的A*路径规划在服务机器人中的应用
1. 视觉辅助A*路径规划:服务机器人导航的智能化升级在服务机器人领域,导航系统正面临一个关键转折点。传统基于激光雷达(LiDAR)的解决方案虽然能精确构建环境几何模型,却对办公桌上的一份机密文件和地上的一片废纸一视…...
)
用E4A中文编程,30分钟搞定一个能远程控制STM32的安卓APP(基于OneNET MQTT)
用E4A中文编程30分钟构建OneNET物联网控制APP全指南 当第一次听说能用中文编写安卓APP控制硬件设备时,我的反应和多数嵌入式开发者一样——这要么是夸大其词,要么功能极其有限。直到在某个智能家居项目截止日前48小时,因Java界面卡死而被迫尝…...

从桌游到代码:用Python模拟《展翅翱翔》AI对手,手把手教你实现策略算法
从桌游到代码:用Python模拟《展翅翱翔》AI对手,手把手教你实现策略算法 桌游与编程的碰撞总能产生奇妙的火花。当《展翅翱翔》这款以鸟类生态为主题的策略桌游遇上Python,我们不仅能体验游戏的乐趣,还能深入探索AI决策的奥秘。本文…...

5个步骤掌握Happy Island Designer:从新手到岛屿设计大师的终极指南
5个步骤掌握Happy Island Designer:从新手到岛屿设计大师的终极指南 【免费下载链接】HappyIslandDesigner "Happy Island Designer (Alpha)",是一个在线工具,它允许用户设计和定制自己的岛屿。这个工具是受游戏《动物森友会》(Ani…...

时间序列预测:朴素方法与网格搜索实战指南
1. 单变量时间序列预测中的朴素方法网格搜索在时间序列预测领域,我们经常陷入一个误区:认为只有复杂的深度学习模型才能获得良好的预测效果。但从业十年来,我发现一个被忽视的真相——简单方法往往能提供惊人的基准性能。今天我要分享的网格搜…...