【IMX6ULL驱动开发学习】01.编写第一个hello驱动+自动创建设备节点(不涉及硬件操作)
目录
一、驱动程序编写流程
二、代码编写
2.1 驱动程序hello_drv.c
2.2 测试程序
2.3 编写驱动程序的Makefile
三、上机实验
3.1 NFS 挂载
3.2 测试示例
一、驱动程序编写流程
-
构造file_operations结构体
-
在里面填充open/read/write/ioctl成员
-
注册file_operations结构体 int major = register_chrdev(0, "name", &fops);
-
入口函数:调用regiister_chrdev
-
出口函数:调用unregiister_chrdev
-
辅助信息: class_create/class_destroy device_create/device_destroy
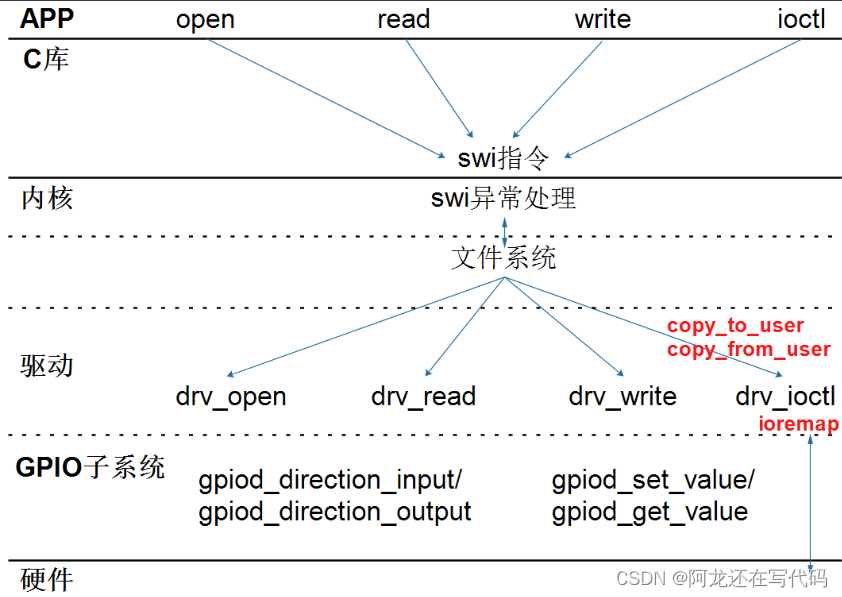
总结:应用程序调用open/read/write/ioctl,驱动程序就给你提供对应的open/read/write/ioctl,只不过驱动程序的这些函数为了便于管理,故把函数放在file_operations结构体里面,通过 register_chrdev函数把结构体告诉内核,并注册字符设备驱动程序。驱动程序里面有个入口函数,相当于main函数,是装载驱动程序时调用的函数,在入口函数中注册,把结构体放到chrdevs数组里面来,出口函数中反注册,就是把结构体拿掉,在卸载驱动程序时调用的函数。
二、代码编写
2.1 驱动程序hello_drv.c
参考 driver/char 中的程序,包含头文件,写框架,传输数据:
- 驱动中实现 open, read, write, release, APP 调用这些函数时,都打印内核信息
- APP 调用 write 函数时,传入的数据保存在驱动中
- APP 调用 read 函数时,把驱动中保存的数据返回给 APP
- 需要注意的是,驱动程序和应用程序之间数据传递要使用copy_from_user(hello_buf, buf, len)和copy_to_user(buf, hello_buf, len)
-
class_create和device_create这两个函数为我们创建了设备节点、主次设备号等辅助信息就不用手动创建设备节点了 mknod /dev/xyz c 245 0
-
class_create(THIS_MODULE, "hello_class"),创建类:为这个模块创建类,类名叫hello_class
-
device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello"),在类下面创建设备信息:在hello_class下创建设备,没有父亲NULL,主次设备号,无私有数据NULL,格式hello根据这些信息,系统会为我们创建设备节点,设备节点名字是/dev/hello,和上面的类名无关
-
device_destroy(hello_class, MKDEV(major, 0))销毁hello_class类下面的这个设备(由主次设备号确定)
-
class_destroy(hello_class)销毁hello_class类
#include "asm/cacheflush.h"
#include <linux/mm.h>
#include <linux/module.h>
#include <linux/miscdevice.h>
#include <linux/slab.h>
#include <linux/vmalloc.h>
#include <linux/mman.h>
#include <linux/random.h>
#include <linux/init.h>
#include <linux/raw.h>
#include <linux/tty.h>
#include <linux/capability.h>
#include <linux/ptrace.h>
#include <linux/device.h>
#include <linux/highmem.h>
#include <linux/backing-dev.h>
#include <linux/shmem_fs.h>
#include <linux/splice.h>
#include <linux/pfn.h>
#include <linux/export.h>
#include <linux/io.h>
#include <linux/uio.h>
#include <linux/uaccess.h>static struct class *hello_class;
static int major;
static unsigned char hello_buf[100];static int hello_open (struct inode *node, struct file *filp)
{printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}static ssize_t hello_read (struct file *filp, char __user *buf, size_t size, loff_t *offset)
{unsigned long len = size > 100 ? 100 : size;printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);copy_to_user(buf, hello_buf, len);return len;
}static ssize_t hello_write(struct file *filp, const char __user *buf, size_t size, loff_t *offset)
{unsigned long len = size > 100 ? 100 : size;printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);copy_from_user(hello_buf, buf, len);return len;
}static int hello_release (struct inode *node, struct file *filp)
{printk("%s %s %d\n", __FILE__, __FUNCTION__, __LINE__);return 0;
}/* 1. create file_operations */
static const struct file_operations hello_drv = {.owner = THIS_MODULE,.read = hello_read,.write = hello_write,.open = hello_open,.release = hello_release,
};/* 2. register_chrdev *//* 3. entry function */
static int hello_init(void)
{major = register_chrdev(0, "100ask_hello", &hello_drv);hello_class = class_create(THIS_MODULE, "hello_class");if (IS_ERR(hello_class)) {printk("failed to allocate class\n");return PTR_ERR(hello_class);}device_create(hello_class, NULL, MKDEV(major, 0), NULL, "hello"); /* /dev/hello */return 0;
}/* 4. exit function */
static void hello_exit(void)
{ device_destroy(hello_class, MKDEV(major, 0));class_destroy(hello_class);unregister_chrdev(major, "100ask_hello");
}module_init(hello_init);
module_exit(hello_exit);
MODULE_LICENSE("GPL");
2.2 测试程序
测试程序要实现读、写功能:
./hello_test /dev/xxx abcdef // 把字符串“abcdeft”发给驱动程序
./hello_test /dev/xxx // 把驱动中保存的字符串读回来hello_drv_test.c源码如下
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>/* 写: ./hello_test /dev/xxx 100ask* 读: ./hello_test /dev/xxx*/
int main(int argc, char **argv)
{int fd;int len;char buf[100];if (argc < 2){printf("Usage: \n");printf("%s <dev> [string]\n", argv[0]);return -1;}// openfd = open(argv[1], O_RDWR);if (fd < 0){printf("can not open file %s\n", argv[1]);return -1;}if (argc == 3){// writelen = write(fd, argv[2], strlen(argv[2])+1);printf("write ret = %d\n", len);}else{// readlen = read(fd, buf, 100);buf[99] = '\0';printf("read str : %s\n", buf);}// closeclose(fd);return 0;
}
2.3 编写驱动程序的Makefile
驱动程序中包含了很多头文件,这些头文件来自内核,不同的 ARM 板它的某些头文件可能不同。所以编译驱动程序时,需要指定板子所用的内核的源码路径。要编译哪个文件?这也需要指定,设置 obj-m 变量即可怎么把.c 文件编译为驱动程序.ko?这要借助内核的顶层 Makefile。
本驱动程序的 Makefile 内容如下:

KERN_DIR = /home/me/Linux-4.9.88 :指定内核目录
先设置好交叉编译工具链,编译好你的板子所用的内核,然后修改 Makefile指定内核源码路径,最后即可执行make命令编译驱动程序和测试程序。 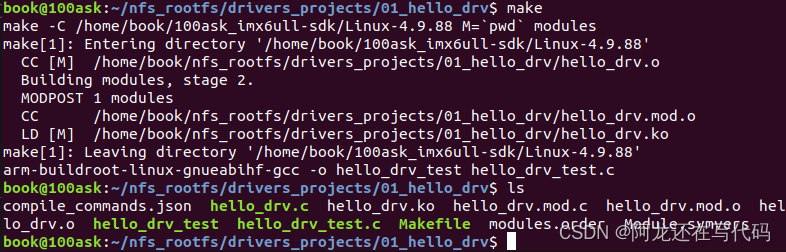
三、上机实验
3.1 NFS 挂载
我们是在 Ubuntu 中编译程序,但是需要在 ARM 板子上测试。所以需要把程序放到 ARM 板子上。启动单板后,可以通过 NFS 挂载 Ubuntu 的某个目录,访问该目录中的程序。
ifconfig eth0 192.168.5.9 //静态配置开发板ip地址
mount -t nfs -o nolock,vers=3 192.168.5.11:/home/book/nfs_rootfs /mnt //挂载到开发板上的mnt目录下
echo "7 4 1 7" > /proc/sys/kernel/printk //打开内核打印信息

3.2 测试示例
首先在开发板的mnt目录下查看文件是否挂载成功,当前目录下以及有了Ubuntu编译好的驱动程序和测试文件

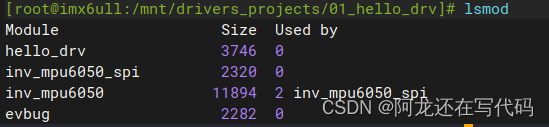
insmod hello_drv.ko // 安装驱动程序
ls /dev/hello -l // 驱动程序会生成设备节点
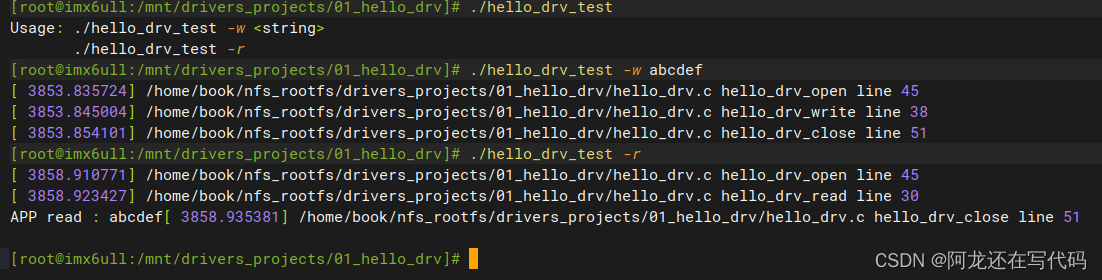
./hello_drv_test // 查看测试程序的用法
显示已载入系统的模块
查看测试程序用法,并写入字符串"abcdef"后读出,测试结果如下:
相关文章:
【IMX6ULL驱动开发学习】01.编写第一个hello驱动+自动创建设备节点(不涉及硬件操作)
目录 一、驱动程序编写流程 二、代码编写 2.1 驱动程序hello_drv.c 2.2 测试程序 2.3 编写驱动程序的Makefile 三、上机实验 3.1 NFS 挂载 3.2 测试示例 一、驱动程序编写流程 构造file_operations结构体 在里面填充open/read/write/ioctl成员 注册file_operations结…...

决策规划仿真平台搭建
决策规划仿真平台搭建 自动驾驶决策规划算法第二章第一节 决策规划仿真平台搭建 这部分的主要难点在于多个软件的连通与适配,环境的搭建总是折磨人的,主要是 4 个软件,各软件版本如下 Visual Studio2017PreScan8.5.0CarSim2019.0MATLAB2019b…...

计算图像哈希SHA-512
1、MATLAB实现 计算图像哈希值SHA-512,在文献[1]提到的算法如下: % Example Code: Create an MD5 crypto-hash of an arbitrary string, "str" % Main class of interest: System.Security.Cryptography.HashAlgorithm% Example String to hash with MD5 %…...
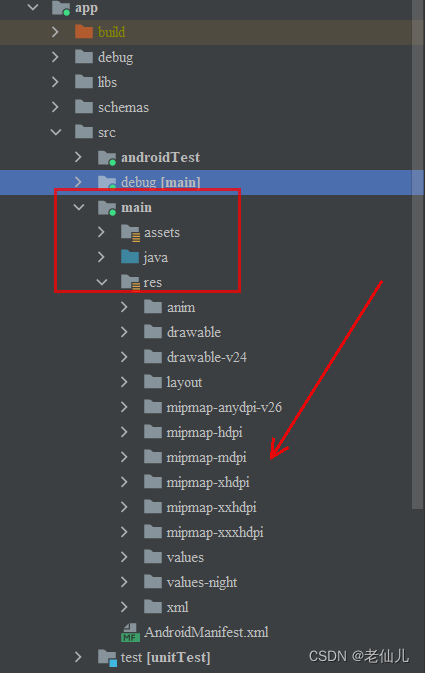
Android之消除APP图标的白色边框
有问题的效果: 解决方案: 第一步:app右键—>new—>Image Asset 第二步:上传Logo图标,选择每种分辨率,预览看效果,选择Resize,可以微调 第三步:点击 Nextÿ…...
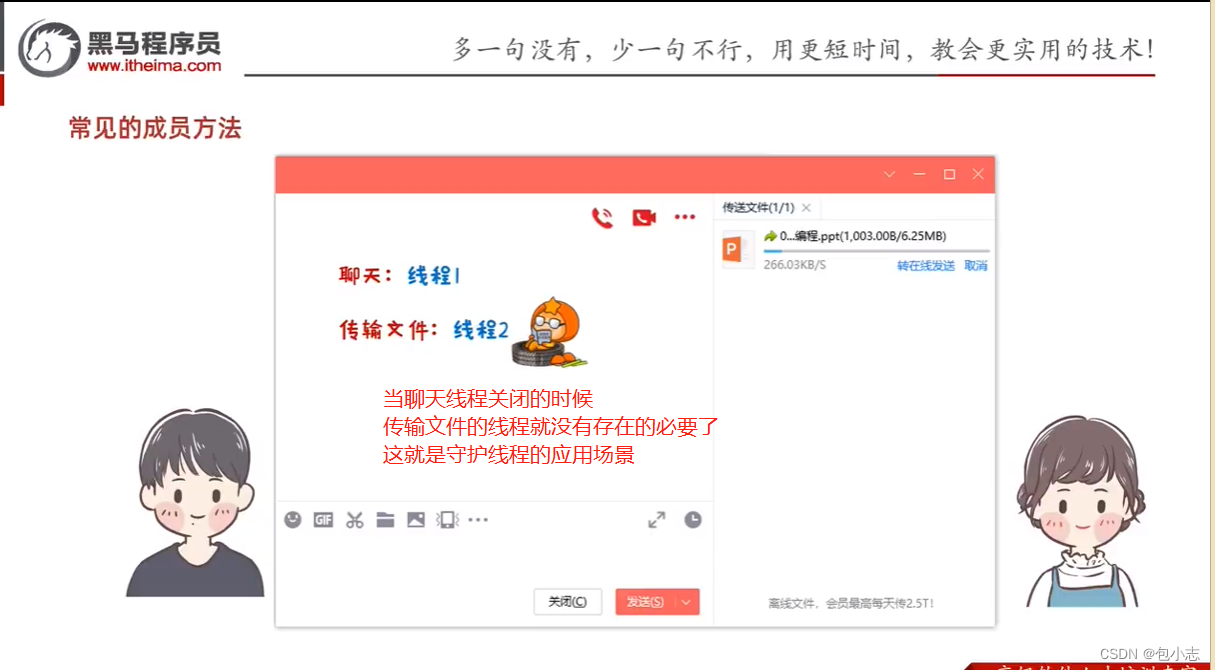
java线程的优先级、守护线程的概念
1.线程的调度 抢占式调度 非抢占式调度 1.1 抢占式调度 优先级越高,抢到cpu的概率越高 1.2 守护线程 守护线程,非守护线程。当其他的非守护线程执行完毕以后,守护线程会陆续结束。 守护线程的应用场景...

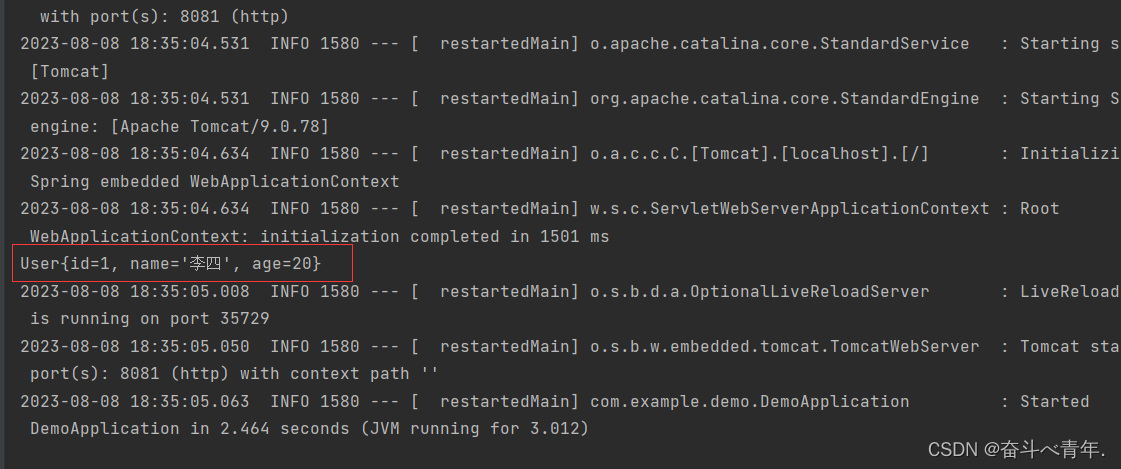
asp.net core 6.0 efcore +sqlserver增删改查的demo
asp.net core 6.0 efcore sqlserver增删改查的demo 下面是一个使用ASP.NET Core 5.0和Entity Framework Core进行增删改查操作的示例。 首先,创建一个空的ASP.NET Core 6.0 Web应用程序项目。 然后,安装以下NuGet包: Microsoft.EntityFra…...

HC32L110B6芯片测试
到货之后,直观上感觉的确很小,小包装盒里面还装了说明书。 下载器单独在一个盒里面,但是这个T-U2T没用上,还是用的STLINK。 开发之前先去网上找了一些别人遇到的坑,的确不少。 涉及的方面也是挺全的,供电、…...

关于我乱删注册表导致电脑没有声音这件事
之前因为想彻底删除迅雷,照着网上进入注册表一顿乱删,也忘记删了啥,反正把一顿xmp的文件,和搜索出来迅雷的全删了。结果迅雷确实没了,被带走的还有电脑的声音。 很离谱,就试过了所有方法都没用,…...

Linux 命令 su 和 sudo 的区别
之前一直对 su 和 sudo 这两个命令犯迷糊,最近专门搜了这方面的资料,总算是把两者的关系以及用法搞清楚了,这篇文章来系统总结一下。 1. 准备工作 因为本篇博客中涉及到用户切换,所以我需要提前准备好几个测试用户,方…...

微信小程序:Mobx的使用指南
简要 微信小程序中有时需要进行全局状态管理,这个时候就需要用到Mobx.下面我们来看一下在小程序中是如何使用Mobx的 安装 pnpm i mobx-miniprogram4.13.2 mobx-miniprogram-bindings1.2.1 或 npm i mobx-miniprogram4.13.2 mobx-miniprogram-bindings1.2.1 或 yarn…...
【Spring Boot】Spring Boot项目的创建和文件配置
目录 一、为什么要学Spring Boot 1、Spring Boot的优点 二、创建Spring Boot项目 1、创建项目之前的准备工作 2、创建Spring Boot项目 3、项目目录的介绍 4、安装Spring Boot快速添加依赖的插件 5、在项目中写一个helloworld 三、Spring Boot的配置文件 1、配置文件的…...
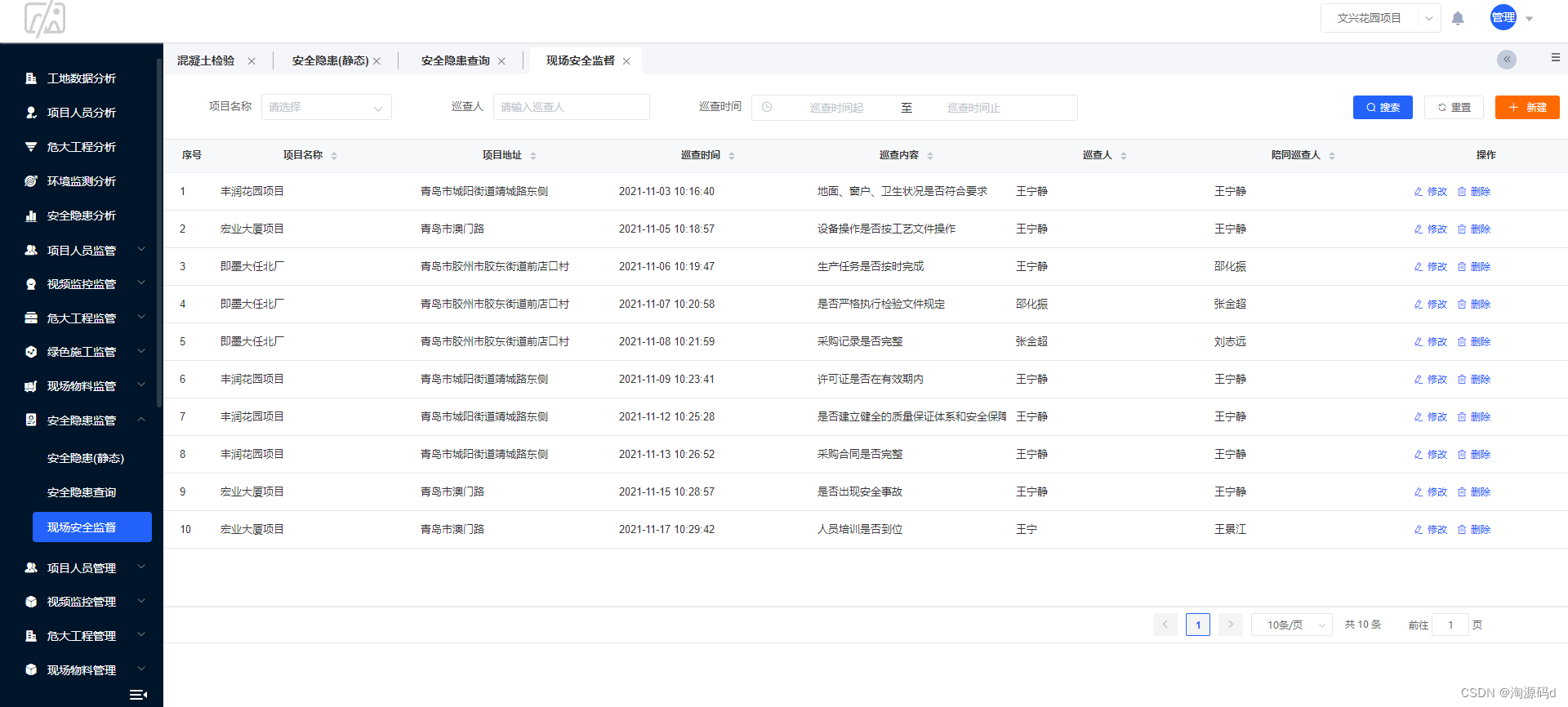
Spring Cloud 智慧工地源码(PC端+移动端)项目平台、监管平台、大数据平台
智慧工地源码 智慧工地云平台源码 智慧建筑源码 “智慧工地”是利用物联网、人工智能、云计算、大数据、移动互联网等新一代信息技术,彻底改变传统建筑施工现场参建各方现场管理的交互方式、工作方式和管理模式,实现对人、机、料、法、环的全方位实时监…...

通达OA SQL注入漏洞【CVE-2023-4165】
通达OA SQL注入漏洞【CVE-2023-4165】 一、产品简介二、漏洞概述三、影响范围四、复现环境POC小龙POC检测工具: 五、修复建议 免责声明:请勿利用文章内的相关技术从事非法测试,由于传播、利用此文所提供的信息或者工具而造成的任何直接或者间接的后果及损…...
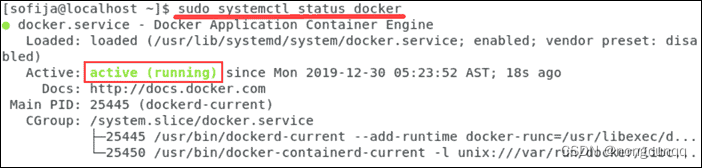
centos7 安装 docker 不能看菜鸟教程的 docker 安装,有坑
特别注意 不能看菜鸟教程的 docker 安装,有坑 如果机器不能直接上网,先配置 yum 代理 proxyhttp://172.16.0.11:8443 配置文件修改后即刻生效,再执行 yum install 等命令,就可以正常安装软件了。 参考 https://blog.csdn.net/c…...
)
♥ vue中$nextTick()
♥ vue中$nextTick() ① 语法 this.$nextTick(回调函数)② 作用 在下一次 DOM 更新结束后执行其指定的回调 使用时机----(比方Echarts地图的渲染) 当改变数据后,要基于更新后的新DOM进行某些操作时,要在nextTick所指定的回调函数中执行 ③ 案例: 实现…...
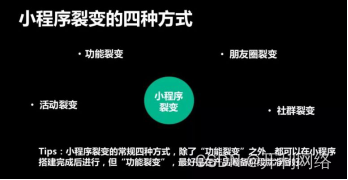
小程序裂变怎么做?小程序裂变机制有哪些?
做了小程序就等于“生意上门”?其实并不是这样。小程序跟流量平台较为明显的区别就在于小程序并非“自带流量”,而是需要企业利用自己的营销推广能力来建立引流渠道,从而完成用户的拉新和留存、转化。因此,想要用小程序来增加自己…...
Openlayers实战:使几何图形适配窗口
Openlayers开发的项目中,有一种应用非常重要,就是绘制或者显示出几何图形后,让几何图形居中并适配到窗口下,这样能让用户很好的聚焦到所要看的内容中去。 这里使用了fit的这个view 的方法,具体的操作请参考示例源代码。 效果图 源代码 /* * @Author: 大剑师兰特(xiaozh…...
活动发布会邀请媒体6步走
传媒如春雨,润物细无声,大家好,我是51媒体网胡老师。 邀请媒体参加活动发布会对信息的传播,企业品牌建设有诸多的好处,今天就与大家分享下邀请媒体参加活动报道的6个步骤: 1. 策划与准备: -明…...
W6100-EVB-PICO作为TCP Client 进行数据回环测试(五)
前言 上一章我们用W6100-EVB-PICO开发板通过DNS解析www.baidu.com(百度域名)成功得到其IP地址,那么本章我们将用我们的开发板作为客户端去连接服务器,并做数据回环测试:收到服务器发送的数据,并回传给服务器…...
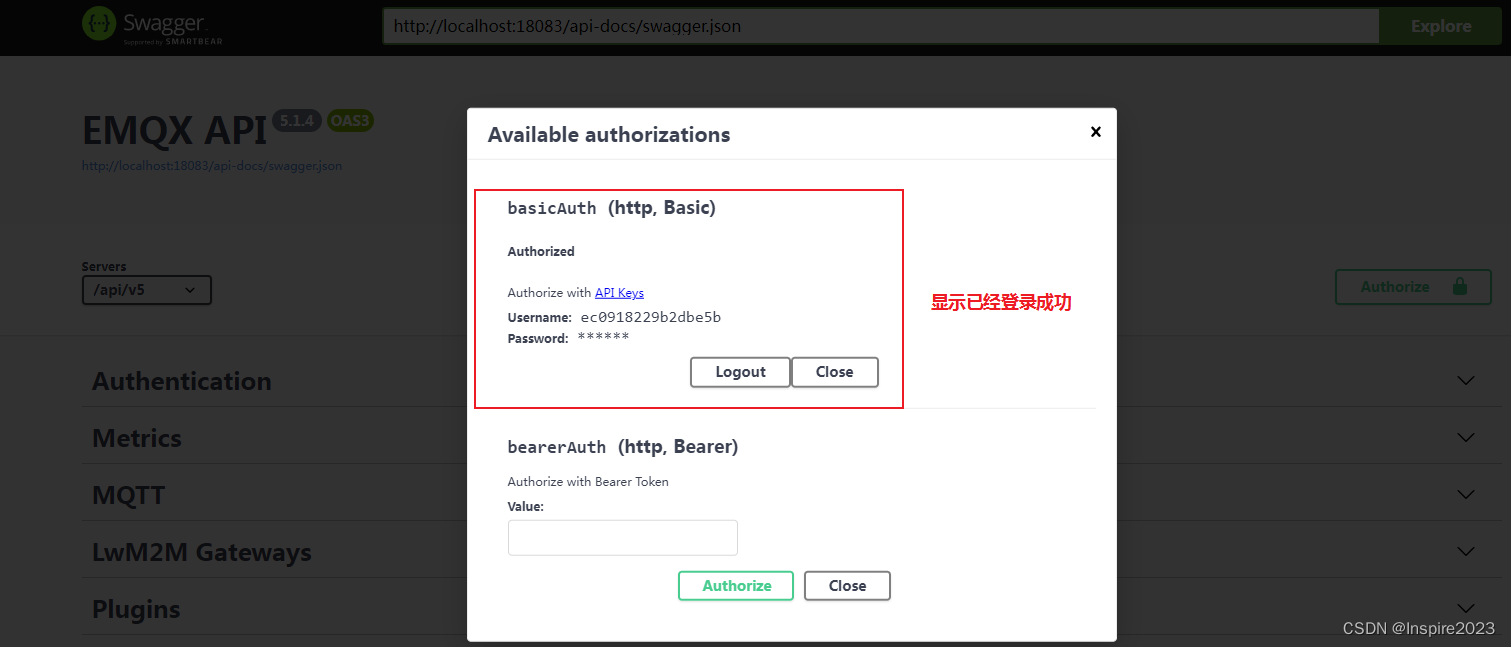
emqx-5.1.4开源版使用记录
emqx-5.1.4开源版使用记录 windows系统安装eqmx 去官网下载 emqx-5.1.4-windows-amd64.zip,然后找个目录解压 进入bin目录,执行命令启动emqx 执行命令 emqx.cmd start使用emqx 访问内置的web管理页面 浏览器访问地址 http://localhost:18083/#/dashboard/overv…...

【路由原理与路由协议-MPLS多协议标签转换】
路由原理与路由协议-MPLS多协议标签转换一、概念二、原理三、流程四、P/PE/CE路由器一、概念 1.MPLS位于OSI模型第2.5层的核心网络技术,它结合了二层(数据链路层)交换的高速性与三层(网络层)路由的灵活性,…...

终极Windows 11系统优化指南:Win11Debloat深度配置与实战技巧
终极Windows 11系统优化指南:Win11Debloat深度配置与实战技巧 【免费下载链接】Win11Debloat A simple, lightweight PowerShell script that allows you to remove pre-installed apps, disable telemetry, as well as perform various other changes to declutter…...

告别“黑盒”:用Vector Davinci工具链手把手配置你的第一个AUTOSAR SWC
从零构建AUTOSAR车窗控制器:Vector Davinci工具链实战指南 第一次打开Vector Davinci Configurator时,满屏的AUTOSAR术语让人仿佛面对着一堵密不透风的技术高墙。作为在汽车电子行业深耕多年的工程师,我完全理解这种手足无措的感觉——AUTOSA…...

从单体到微服务:如何用Spring Cloud构建高可用医院信息系统HIS
从单体到微服务:如何用Spring Cloud构建高可用医院信息系统HIS 【免费下载链接】HIS HIS英文全称 hospital information system(医疗信息就诊系统),系统主要功能按照数据流量、流向及处理过程分为临床诊疗、药品管理、财务管理、患…...

晶体管工作原理与半导体技术解析
1. 晶体管工作原理与半导体技术解析1947年圣诞节前夕,贝尔实验室的两位物理学家约翰巴丁和沃尔特布拉顿在锗晶体表面放置了两个相距仅0.05毫米的金属触点,意外发现这个简单装置能够放大电信号。这个被称为"点接触晶体管"的发明,彻底…...

手把手调试RK3588电源:当CPU变频失效时,如何排查DTS中的PMIC配置问题
RK3588电源调试实战:当DVFS失效时如何精准定位PMIC初始化问题 凌晨三点,实验室的咖啡机已经空了第三轮。盯着屏幕上/d/opp/opp_summary里空空如也的频率信息,我意识到这又是一个典型的RK3588电源初始化顺序问题。作为嵌入式工程师,…...
上搞定Java 11 + JavaFX 11的完整配置流程)
保姆级教程:在Linux(Ubuntu 20.04)上搞定Java 11 + JavaFX 11的完整配置流程
从零开始:Ubuntu 20.04下Java 11与JavaFX 11开发环境深度配置指南 在Linux系统上进行Java桌面应用开发,环境配置往往是新手面临的第一个挑战。不同于Windows或macOS的一键安装体验,Ubuntu上的JavaFX开发需要开发者对模块化系统、环境变量和依…...
)
给嵌入式新人的保姆级指南:从零搞定MaixBit开发板(含驱动、固件、IDE完整配置流程)
给嵌入式新人的保姆级指南:从零搞定MaixBit开发板(含驱动、固件、IDE完整配置流程) 第一次拿到MaixBit开发板时,那种兴奋和忐忑交织的感觉我至今记忆犹新。这块小小的板子就像一扇通往智能硬件世界的大门,但驱动安装、…...

别再死记硬背YOLO的9个anchors了!用Python可视化带你搞懂它在特征图上的调整过程
用Python动态可视化拆解YOLO anchors的调整逻辑 第一次看到YOLO的9个anchors参数时,我盯着那堆数字发呆了半小时——这些宽高组合到底如何影响最终检测框?为什么调整几像素就能让模型性能波动5%?直到我用Matplotlib逐帧绘制了特征图上的坐标变…...
)
GRBL固件源码深度解析:如何为你的DIY CNC雕刻机定制专属配置文件(以限位与主轴为例)
GRBL固件源码深度解析:如何为你的DIY CNC雕刻机定制专属配置文件(以限位与主轴为例) 当你第一次听到GRBL这个名词时,可能会觉得它只是一个普通的开源CNC控制固件。但当你真正开始使用它,特别是当你需要为自己的DIY CN…...