数字图像处理 --- 相机的内参与外参(CV学习笔记)
Pinhole Camera Model(针孔相机模型)
针孔相机是一种没有镜头、只有一个小光圈的简单相机。 光线穿过光圈并在相机的另一侧呈现倒立的图像。为了建模方便,我们可以把物理成像平面(image plane)上的图像移到实际场景(3D object)和焦点(focal point)之间,把他想象成一个和物理成像平面等大小的虚拟图像平面(Virtual image plane),这样一来就不再是倒立的图像,而是直立图像。

有了相机后,上图中的蓝色盒子就变成了相机,上图中的物理成像平面Image plane也被数字化到由一个个pixel组成的sensor上,并保存下来。因此,对于相机而言,上图中的焦点就是相机的镜头,而上图中的物理成像平面,需要被转换成像素平面(pixel plane),物理成像平面(image plane)与像素平面(pixel plane)大小相同,计量单位不同。物理成像平面的单位是一个物理单位,例如mm,,而像素平面实际上就是一个二维图像,他的单位实际上是某某pixel在图像中的第几行第几列。
为了后续的描述方便我们这里先定义四个坐标系:
1,二维像平面(焦平面)坐标系Image plane,原点为,坐标轴用
,
表示。
2,二维图像坐标系pixel plane,原点为,坐标轴用
,
表示。
3,三维相机坐标系pinhole plane/camera,原点为,坐标轴用
,
,
表示。
4,三维世界坐标系world,原点为,坐标轴用
,
,
表示。
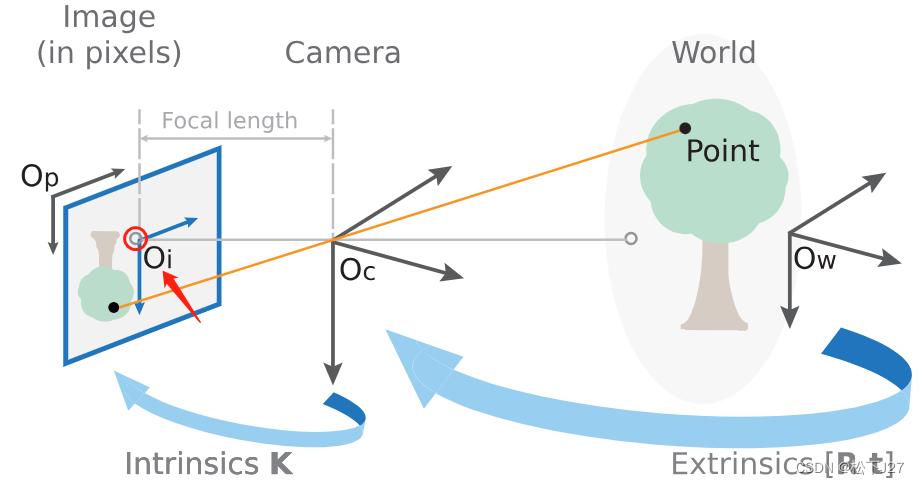
将3D世界场景映射成2D图像(像素平面pixel plane)总共分两步,第一步是把定义在世界坐标系中的实际3D物体映射到3D相机极坐标系中。相当于是把实际世界中的物体分别通过两个不同的坐标系来表示,然后通过找到这两个不同坐标系之间的差异,建立这两个坐标系之间的联系。这一转换关系就是下图中到
的转换。
从3D世界坐标系(world coordinates)到3D相机坐标系(camera coordinates),需要用到外参(extrinsic parameters)或外参矩阵(extrinsic matrix)--->[R t]。


其次,从3D相机坐标系(camera coordinates)到2D像素坐标系(pixel plane)需要用到内参(intrinsic parameters)或内参矩阵(intrinsic matrix)--->K。同样是把成像后的图像,用两个不同的坐标系来表示,然后再建立这两个坐标系(物理成像坐标系与二维图像坐标系)之间的联系,使两者可以相互转换。
extrinsic parameters外参:世界坐标系到相机坐标系
对于世界坐标系中的某一点大M而言,他本身是存在了,并不会因为我们有没有建立坐标系而受影响。但当我们人为的建立坐标系以后,这个点在我们所定义的坐标系下就有坐标值了。首先,对于点M而言,他在世界坐标系下可表示为M=[],而在相机坐标系中M=[
],这是同一个点,只不过在不同的坐标系所对应的坐标值不同。(其中:
中的上角标“M”表示点M,下角标"w"表示世界坐标系worl,以此类推,关于下角标的定义可参照我上面定义的四个坐标系。)
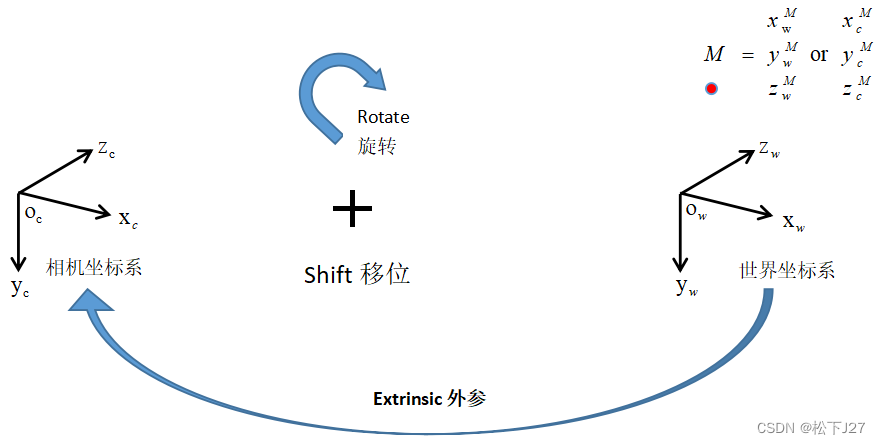
相机坐标系相对于世界坐标系而言,我们不能保证两个坐标系的原点完全重合,因此,对于x-y-z都存在一定的位移,由一个3x1矩阵t(translation)表示,其中每个元素分别对应了x-y-z方向上的位移:
此外,我们也不能保证相机在拍照时没有任何角度的偏差,因此,这两个坐标系的坐标轴存在一个整体的旋转。由一个3x3矩阵R(rotation)表示:
二者合并得到增广矩阵[R|t],使得:
其中:
这一数学表达式的意义是:一个在世界坐标系中定义的点,如果要用相机坐标系来表示,可以用矩阵[R|t]左乘该点的世界坐标系坐标实现。

这样一来就完成了大M点在世界坐标系下的坐标值到相机坐标系下的坐标值的转化:
Intrinsic parameters内参:
通过前面的研究,我们找到了世界坐标系与相机坐标系的联系,相当于学会了用相机坐标系来表示世界的物体(3D Object),现在,我们用相机坐标系来分别描述世界中的实际物体与“挪到前面来的”物理成像平面中物体的像,即,在相机坐标系中用不同的坐标值定义了世界中的实际物体大M点与虚拟成像平面上的像---小m点(图一),并找到他们之间的联系。

(图一)
表示光心,也叫摄影中心。过光心做垂直于物理成像平面的直线叫主光轴(principal axis),垂点
叫主点(principal point)。光心
与主点
之间的距离为焦距f。
现在,在相机坐标系中,我们令世界中的某一点大M的坐标值为M=[]。在虚拟成像平面中所成的像为小m,且小m的坐标值为m=[
](注意:x-y-z的上角标,我用大写的M表示实际点大M所对应的坐标值,用小写的m表示虚拟成像平面中的点小m)。同时,我们令主光轴与相机坐标系中的
轴重合,单看相机坐标系中由
与
轴组成的平面(图二),我们令大M在这一平面上的投影为
,令小m在
-
平面上的投影为
。
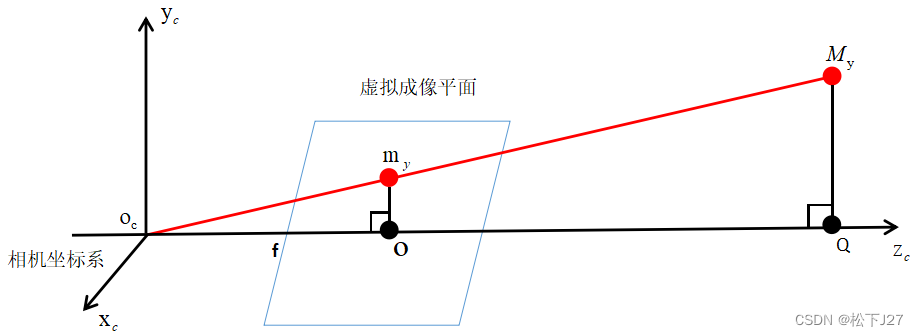
(图二)
在三角形中,线段
的长度为小m在
轴方向的坐标值
,线段
的长度为小m在
轴方向的坐标值
。在三角形
中,线段
的长度为
,线段
的长度为
。根据三角形
与三角形
相似,可以建立如下关系:
又因为小m点一定在物理成像平面上,则,在3D相机坐标系中,恒等于等于焦距f,代入上式后得出:
同样,如果单看相机坐标系中的与
轴所组成的平面(见图三),且用
表示大M在这一平面上的投影,用
表示小m在
-
平面上的投影:
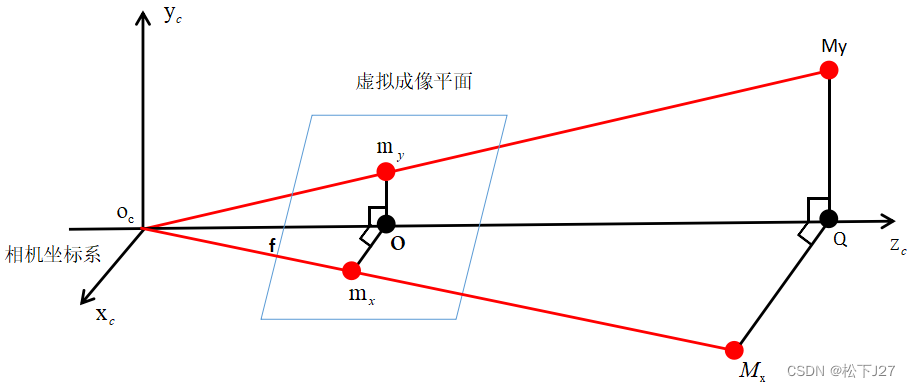
(图三)
根据相似相似三角形 与三角形
,可以建立如下关系
这样一来,我们就建立了世界中的大M与虚拟成像平面上的对应点小m,在相机坐标系中的关系:
(上面两式合称为公式1)
相机坐标系到像平面坐标系:
又因为,虚拟成像平面中的小m点,不仅在3D相机坐标系中,也在2D像平面坐标系中。且,像平面坐标系的中心在主光轴上。这就意味着,对于同一个点光心O而言,他在相机坐标系下的坐标值和在2D像平面坐标系下的坐标值相同。即,光心在相机坐标系下的坐标值为[=0,
=0],同时,他在2D像平面坐标系中的坐标值也等于[
=0,
=0]
同理,已知相机坐标系中小m点的坐标值为m=[,
],令小m点在相平面中的坐标值为m=[
,
],则有:
(公式2)
如图四所示:

(图四)
这就完成了相机坐标系到像平面坐标系的转换。
像平面坐标系到图像坐标系:
在相机内部,物理成像平面被sensor以pixel为单位采样了,且,图像坐标系的原点在图像的左上角,见图五。因此,像平面坐标系中的小m点的坐标值,还需要一个转换关系。

(图五)
一方面,图像坐标系是用mxn个像素对像平面坐标系的采样。所以需要一个由mm为单位的像平面坐标系到以pixel为单位的图像坐标系的转换。
假设图像传感器的物理尺寸,也就是物理成像平面的大小为mxn(mm),传感器保存的图像尺寸为wxh(pixel)。要想把mxn的像保存到wxh的图上,则,以mm为单位的物理成像平面与以pixel为单位的图像之间的比例关系为:
第一个等式表示,图像中每个pixel的物理尺寸有多宽mm。
第二个等式表示,图像中每个pixel的物理尺寸有多高mm。
这样一来,就能用图像坐标系的坐标值(第几行第几列)来替换小m点在像平面坐标系中的坐标值(即,在方向的长度为
(mm)和在
方向的长度为
(mm)):
(公式3)
另一方面:二维图像坐标系的原点在图像(sensor)的左上角,而像平面坐标系的原点则是在senor的中心。因此,对于同一个点光心O而言,他在2D图像坐标系下的坐标值和在2D像平面坐标系下的坐标值不同,这两个坐标值之间存在一个偏移量Offset。我们在图像坐标系内定义方向上
到
的偏移量为
,他等于图像的宽度的一半---w/2,在
方向上
到
的偏移量为
,他等于图像的长度的一半---h/2。

光心O在图像坐标系中的坐标值是:
(公式4)
其中:
公式4的意思是:光心O在图像平面中的坐标值等于他在像平面中的坐标值加上一定的偏移量。同理,已经转换到图像坐标系内的小m点的坐标值(见公式3),加上Offset后为:
(公式5)
进一步,将公式2带入公式5后有:
然后再带入公式1,得到:
(公式6)
我们令,则上式可简化为:
(公式7)
其中:
1,表示以mm为单位的物理焦距f,在横向等于多少个像素。
2,表示以mm为单位的物理焦距f,在竖向等于多少个像素。
公式7用矩阵的方式可表示为:
其中的3x3矩阵,就叫内参矩阵,用大写的英文字母K表示。

总结:
最后我们来梳理一下整个转换过程:
1,大M点在世界坐标系下的坐标值[],通过外参矩阵[R t]得到了大M点在相机坐标系中的坐标值[
]。(通过同一点在不同坐标系中的坐标值,找到两个坐标系之间的关系。)
2,在相机坐标系中,根据相似三角形求出大M点在虚拟成像平面中所对应的小m点的坐标值[]。(通过同一坐标系下的不同点,找到这两个点之间坐标值的联系)
3,根据虚拟成像平面在相机坐标系中的位置,根据小m点在相机坐标系下的坐标值[,
,
]得到他在像平面坐标系下的坐标值[
=
,
=
]。(通过同一点在不同坐标系中的坐标值,找到两个坐标系之间的关系。)
4,最后,根据像平面坐标系与图像坐标系的相对关系,通过内参矩阵把小m点在像平面中的坐标值[,
]转到了图像坐标系中所对应的坐标值[
,
]。
参考文献:
1,https://www.cnblogs.com/xiaohuidi/p/15711767.html
2,What Is Camera Calibration?- MATLAB & Simulink- MathWorks 中国
3,2.3 透视投影的相机模型_哔哩哔哩_bilibili
版权声明:文中的部分图片,文字或者其他素材,可能来自很多不同的网站和说明,在此没法一一列出,如有侵权,请告知,立即删除。欢迎大家转载,但是,如果有人引用或者COPY我的文章,必须在你的文章中注明你所使用的图片或者文字来自于我的文章,否则,侵权必究。 ----松下J27
相关文章:
数字图像处理 --- 相机的内参与外参(CV学习笔记)
Pinhole Camera Model(针孔相机模型) 针孔相机是一种没有镜头、只有一个小光圈的简单相机。 光线穿过光圈并在相机的另一侧呈现倒立的图像。为了建模方便,我们可以把物理成像平面(image plane)上的图像移到实际场景(3D object)和焦点(focal p…...
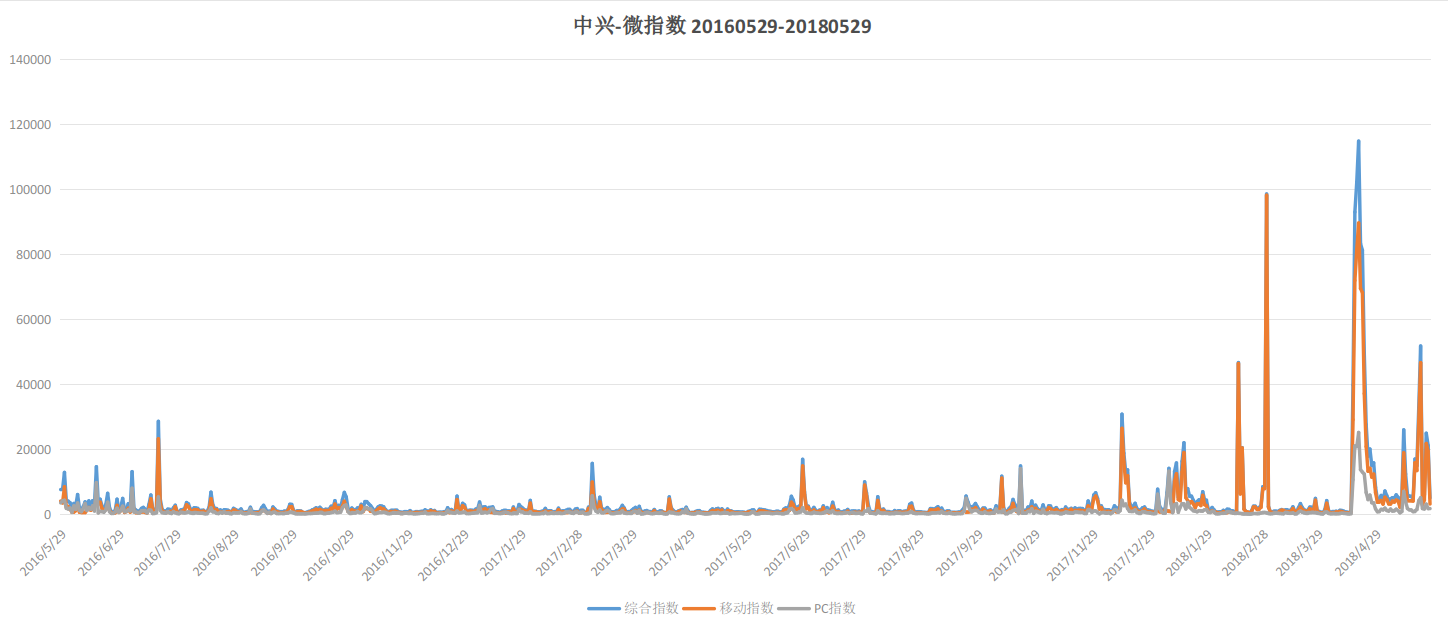
基于新浪微博海量用户行为数据、博文数据数据分析:包括综合指数、移动指数、PC指数三个指数
基于新浪微博海量用户行为数据、博文数据数据分析:包括综合指数、移动指数、PC指数三个指数 项目介绍 微指数是基于海量用户行为数据、博文数据,采用科学计算方法统计得出的反映不同事件领域发展状况的指数产品。微指数对于收录的关键词,在指…...

金融反欺诈的应用实践
“根据980起全球重大金融欺诈事件分析,60%的欺诈发生在移动端,同比增长170%。“,在香港近日举办的金融科技沙龙上,顶象金融业务安全专家史博表示,金融业已成为不法分子重要的攻击对象。 本届金融科技沙龙由Databricks…...
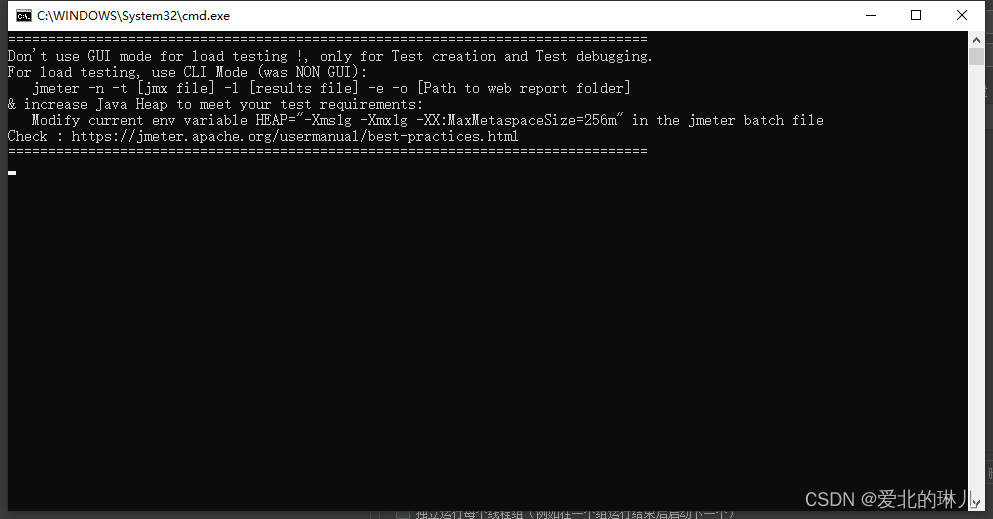
Win10启动Jmeter报错提示jmeter.log拒绝访问问题
jmeter版本:5.4.1 查看版本 在dos命令窗口中进入jmeter安装目录下的bin目录中:执行jmeter - v命令 我启动的方式是:进入jmeter安装目录下的bin目录中双击jmeter.bat启动的。结果报错,但是不影响使用。 报错日志如下: …...
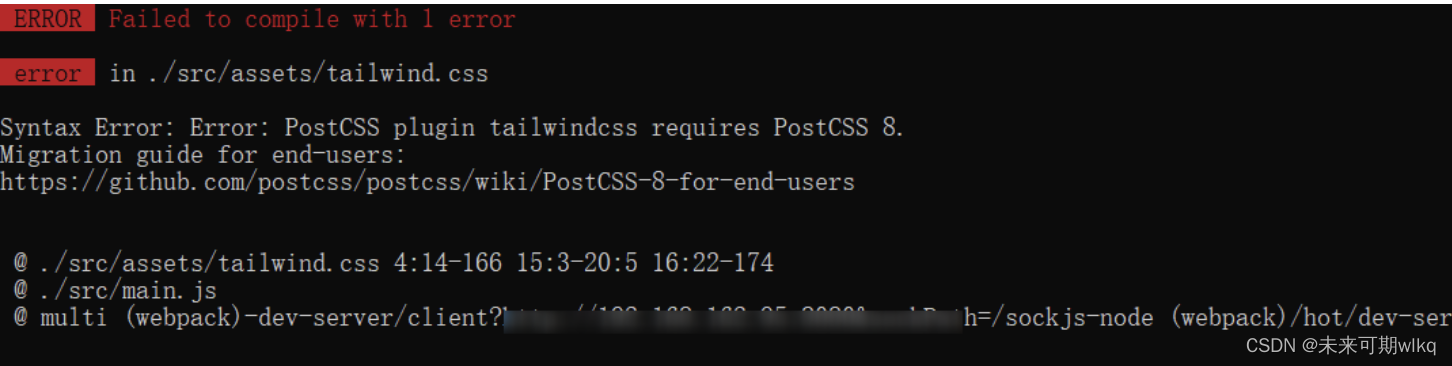
Vue中使用Tailwind css
1.什么是Tailwind 就是一个CSS框架,和你知道的bootstrap,element ui,Antd,bulma。一样。将一些css样式封装好,用来加速我们开发的一个工具。 Tailwind解释 tailwind css 中文文档 2.Vue使用Tailwind配置 1. 新建vu…...
承接各种设计
小弟985研究生毕业,目前攻读读博士,可做各种设计,包括但不限于Matlab 电力电子/电气工程,matlab/simulink 电气专业仿真MATLAB 电气工程专业,matlab建模 电力电子,电气工程,电力系统,…...

HTTP请求性能分析 - 简单
使用随手可得的工具,尽量少的前置要求,来完成任务。 0. 目录 1. 前言2. 分析工具2.1 基于Chrome DevTools 的Timing2.1.1 关于Network标签页下的Timing部分2.1.2 一些注意项 2.2 基于Curl 命令 3. 剩下的工作 1. 前言 对于业务开发选手而言,…...

腾讯云标准型CVM云服务器详细介绍
腾讯云CVM服务器标准型实例的各项性能参数平衡,标准型云服务器适用于大多数常规业务,例如:web网站及中间件等,常见的标准型云服务器有CVM标准型S5、S6、SA3、SR1、S5se等规格,腾讯云服务器网来详细说下云服务器CVM标准…...
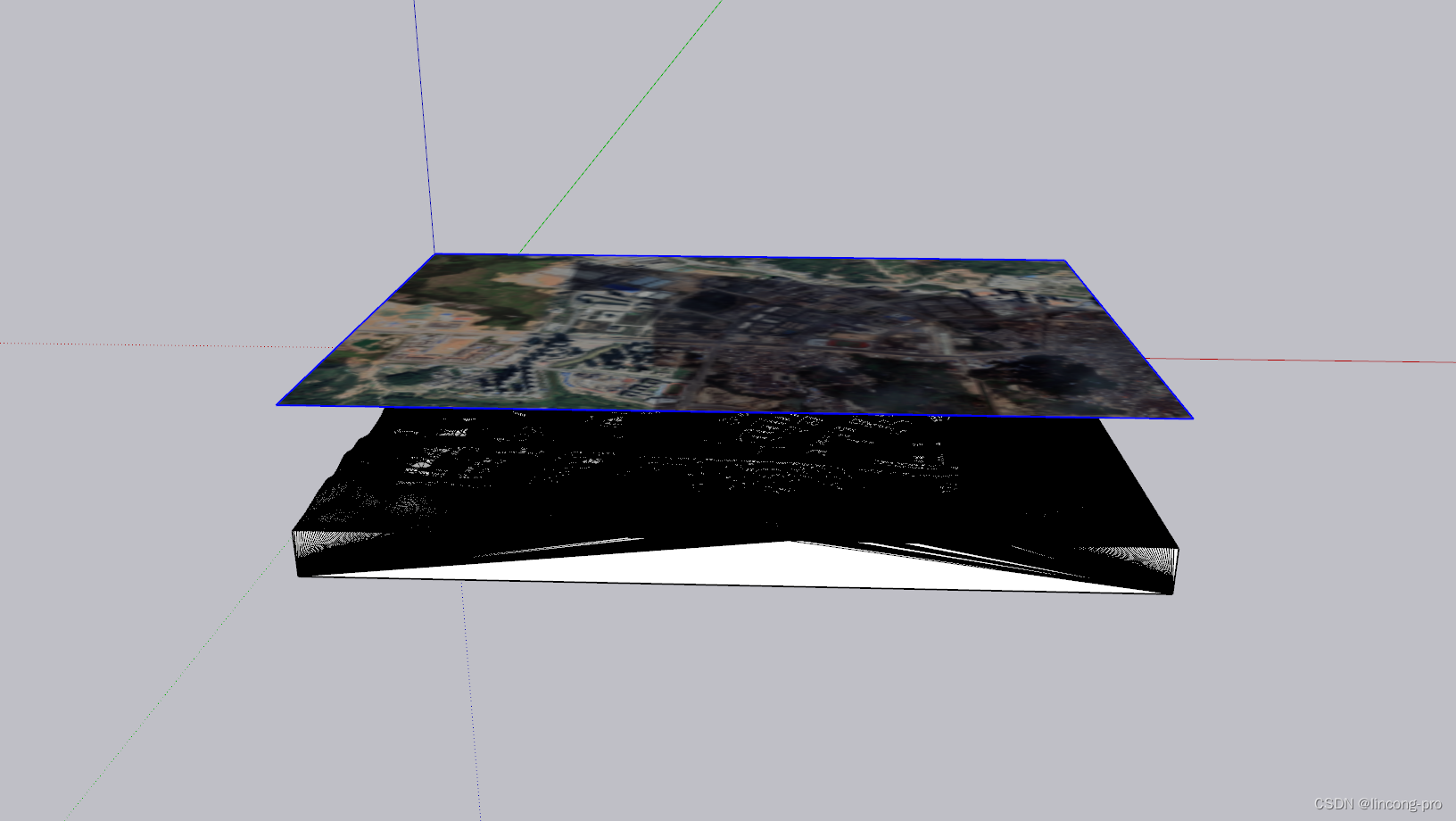
基于DEM tif影像的插值平滑和tif纹理贴图构建方法
准备数据是一个10米分辨率的Tif影像,直接用于生成DEM会十分的不平滑。如下图所示,平滑前后的对比效果图差异: 基于ArcGIS的DEM平滑插值 等值线生成(指定加密间距) 平滑线(指定平滑容差平滑等高线࿰…...

Redis_五种数据类型及操作命令
5.redis常用的五种数据类型 5.1 Redis String字符串 5.1.1 简介 String类型在redis中最常见的一种类型string类型是二制安全的,可以存放字符串、数值、json、图像数据value存储最大数据量是512M 5.1.2 常用命令 set < key>< value>:添加…...
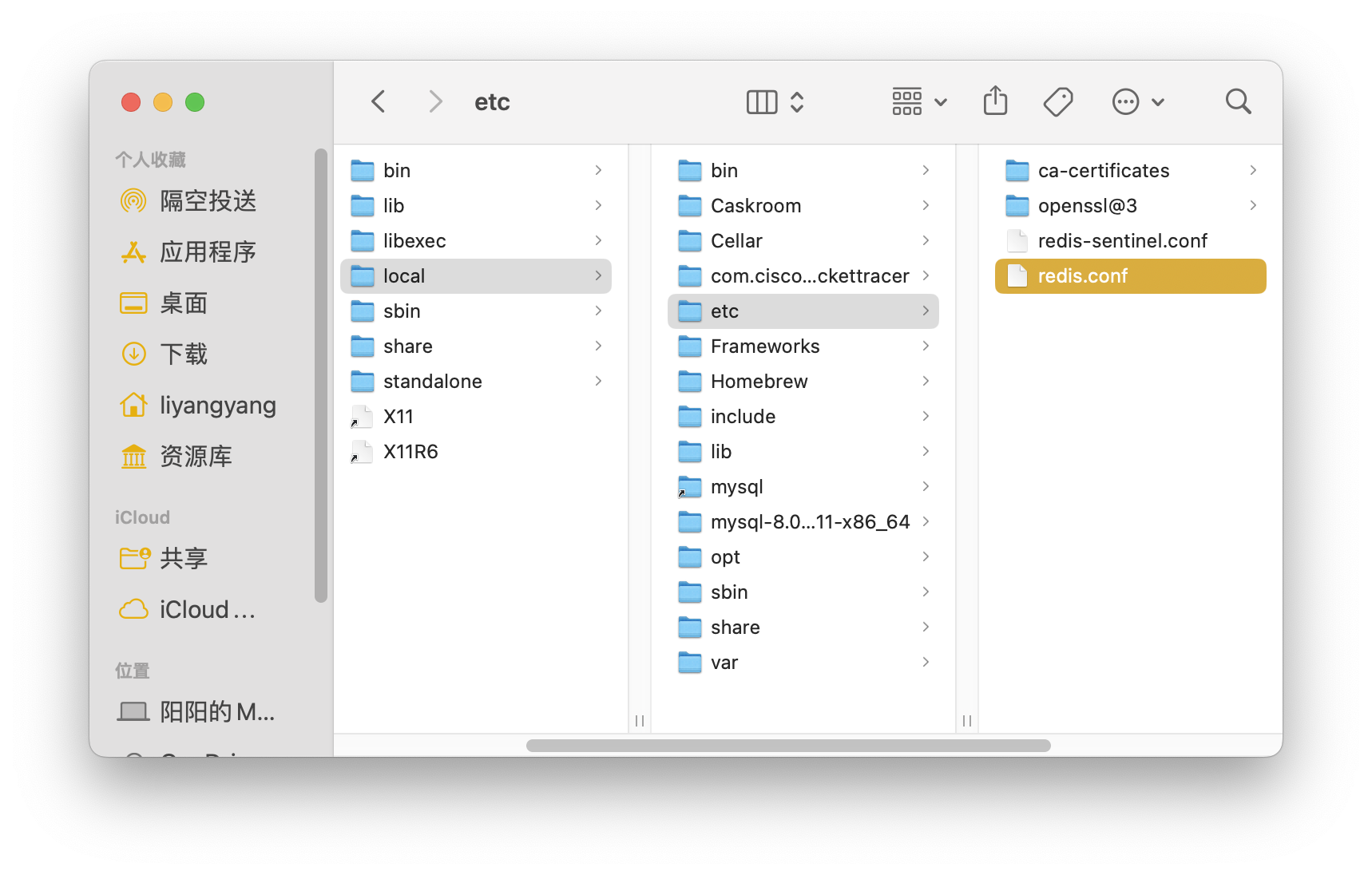
Mac如何打开隐藏文件中Redis的配置文件redis.conf
Redis下载(通过⬇️博客下载的Redis默认路径为:/usr/local/etc) Redis下载 1.打开终端进入/usr文件夹 cd /usr 2.打开/local/文件夹 open local 3.找到redis.conf并打开,即可修改配置信息...
nginx+flask+uwsgi部署遇到的坑
文章目录 1.环境:2.uwsgi_conf.ini具体配置内容3.nginx 具体配置4.具体命令(注意使用pip3命令安装)5.服务异常排查 1.环境: centos8 uWSGI 2.0.22 gmssl 3.2.2 nginx version: nginx/1.18.0 项目目录: 2.uwsgi_conf.ini具体配置内容 [uws…...
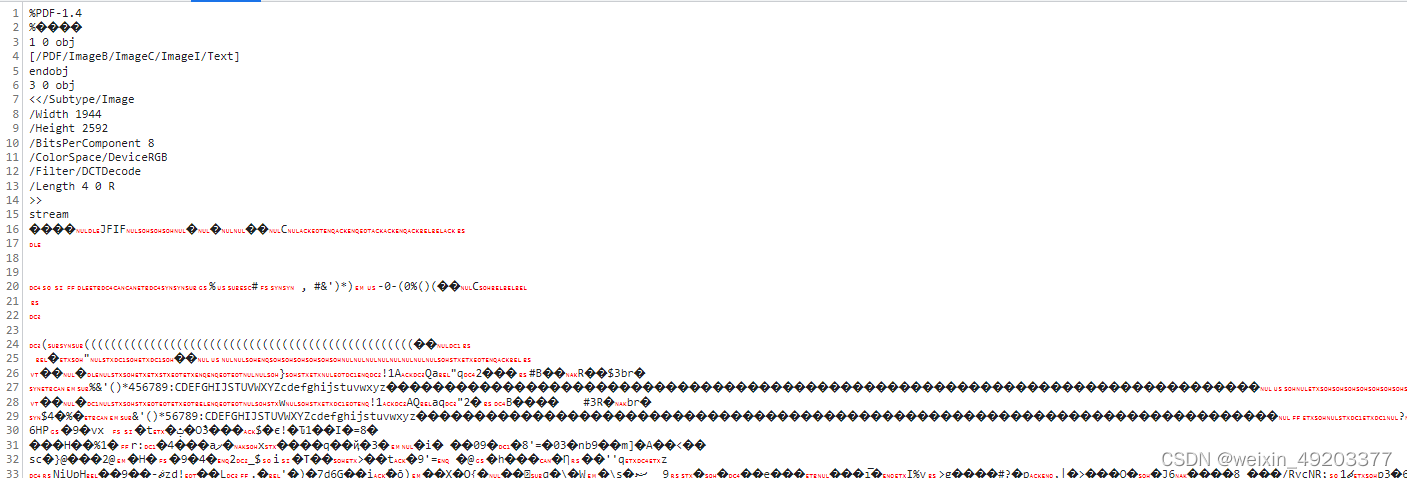
vue实现pdf预览功能
背景:材料上传之后点击预览实现在浏览器上预览的效果 效果如下: 实现代码如下: //预览和下载操作 <el-table-column fixed"right" label"操作" width"210"><template #default"scope">…...

(原创)Flutter与Native页面互相跳转
前言 实际开发混合项目时,常常会有页面跳转的需求 如果是原生界面和flutter界面需要互相跳转 这种情况应该怎么处理呢? 今天这篇博客主要就来介绍下这个情况 其实想一下,这个问题可以拆成四个小的问题来分析: 1:原生界…...

web集群学习--基于CentOS构建LVS-DR集群、配置nginx负载均衡
基于CentOS构建LVS-DR集群 环境准备 主机名 ip地址 node1 192.168.1.140 client node2 192.168.1.141 LVS node3 192.168.1.142 RS1 node4 192.168.1.143 RS2配置 1.关闭防火墙和SELinux [rootclient~]# systemctl stop firewalld [rootclient~]# systemctl disabl…...
基于 FPGA 的电机控制
FPGA 非常适合精密电机控制,在这个项目中,我们将创建一个简单的电机控制程序,在此基础上可以构建更复杂的应用。 需要的硬件 Digilent Pmod HB3 介绍 我们可以用一个简单的 8 位微控制器来控制电机,输出一个简单的脉宽调制波形。然…...
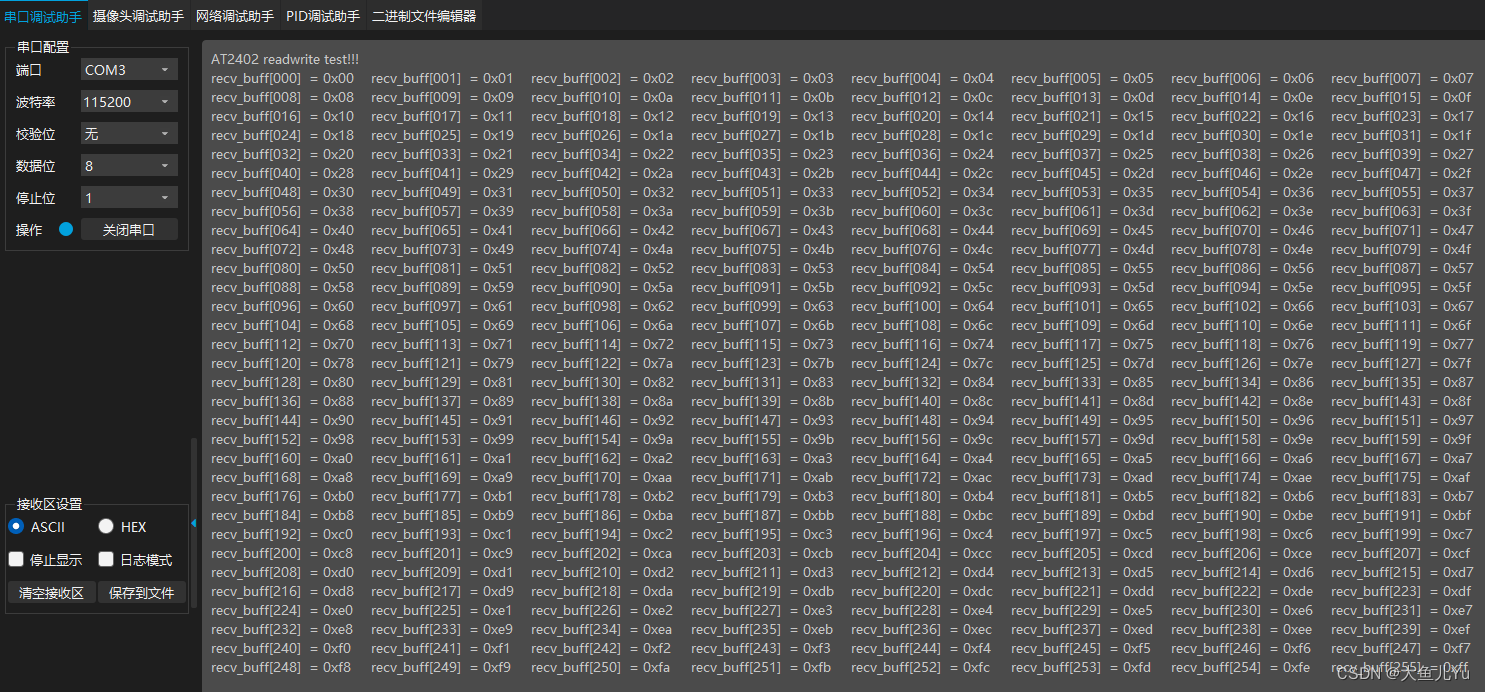
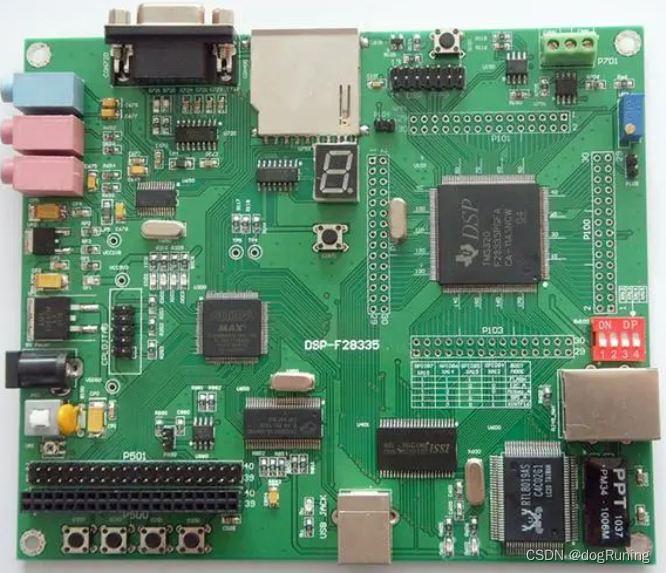
STM32F429IGT6使用CubeMX配置IIC通信(AT2402芯片)
1、硬件电路 写地址:0xA0 读地址:0xA1 存储容量:256Byte 2、设置RCC,选择高速外部时钟HSE,时钟设置为180MHz 3、配置IIC 4、生成工程配置 5、部分代码 #define IIC_WRITE_ADDR 0xA0 // IIC写地址 #define IIC_READ_ADDR 0xA1 …...
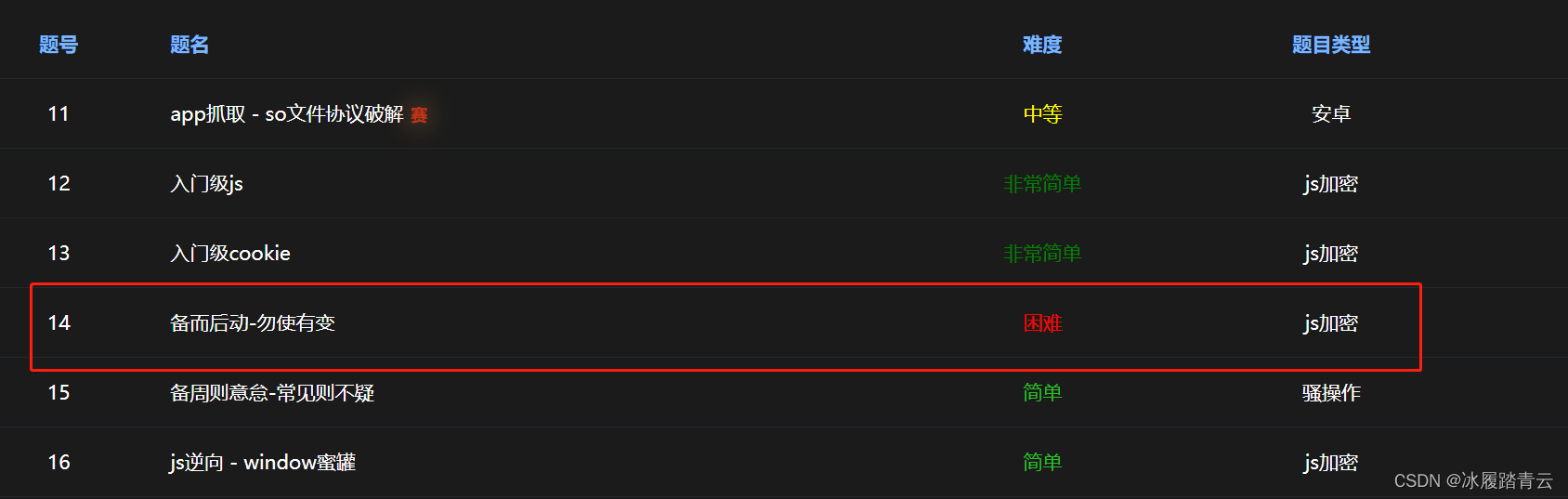
JS逆向系列之猿人学爬虫第14题-备而后动-勿使有变
文章目录 题目地址参数分析参考jspython 调用往期逆向文章推荐题目地址 https://match.yuanrenxue.cn/match/14题目难度标的是困难,主要难在js混淆部分。 参数分析 初始抓包有无限debugger反调试,可以直接hook 函数构造器过掉无限debugger Function.prototype.__construc…...

学cpp看的那点书
C C Primer 语言基础学习 C Templates The Complete Guide (2nd Edition) 学习模板,更好的阅读 STL 源码,毕竟C 标准库大部分是模板。 The C Standard Library 全称 The C Standard Library A Tutorial and Reference Second Edition简单的了解标…...
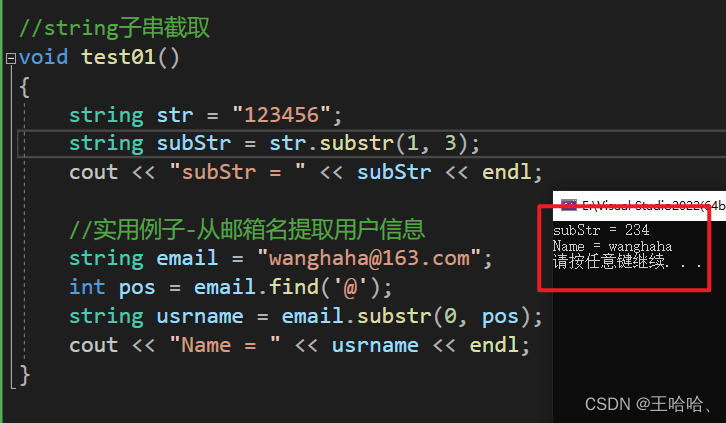
【C++】常用容器-string容器
1.string基本概念 2.string构造函数 #include <iostream> using namespace std;//string容器 void test01() {string s1;//创建空字符串,调用无参构造函数cout << "str1 " << s1 << endl;//什么都不输出const char* str "…...

别再死记硬背InceptionV3结构了!从四大设计原则出发,手把手教你设计自己的高效CNN模块
从InceptionV3四大设计原则到高效CNN模块实战指南 当你在GitHub上搜索"CNN架构复现"时,会发现90%的代码仓库都在机械复制网络结构图。这种知其然不知其所以然的学习方式,正是阻碍开发者真正掌握神经网络设计精髓的症结所在。本文将带您跳出结构…...

Gemini 科研示意图 / 流程图生成,一键出图
在学术研究和项目汇报中,清晰的示意图和流程图往往比大段文字更有说服力。但手动绘制这些图形耗时耗力,尤其是对非设计背景的研究者而言。这时,AI工具的价值就凸显出来了。在探索各种AI绘图能力时,像库拉KULAAI(t.kulaai.cn)这样的…...
GraalVM Native Image内存优化终极清单(含JFR+Native Memory Tracking双栈诊断流程):覆盖Spring Boot 3.x + Jakarta EE 9+全生态
第一章:GraalVM Native Image内存优化的企业级价值与挑战在云原生与微服务架构深度落地的今天,GraalVM Native Image 通过将 JVM 应用提前编译为平台原生可执行文件,显著降低了启动延迟与运行时内存开销。其内存优化效果并非仅体现于堆内存&a…...

3步打造完美静音PC:FanControl终极风扇控制完全指南
3步打造完美静音PC:FanControl终极风扇控制完全指南 【免费下载链接】FanControl.Releases This is the release repository for Fan Control, a highly customizable fan controlling software for Windows. 项目地址: https://gitcode.com/GitHub_Trending/fa/F…...
与backtest::audit()审计接口)
R 4.5量化回测必须掌握的3个隐藏函数——.onLoad回测钩子、getStrategyEnv()与backtest::audit()审计接口
第一章:R 4.5量化回测生态演进与核心范式跃迁R 4.5版本标志着量化回测基础设施的一次结构性升级,其核心不再局限于传统时间序列建模能力的增强,而是通过统一的S3/S4对象协议重构了回测生命周期管理范式。底层C引擎(RcppQuantuccia…...
)
【会议征稿通知 | 中南大学主办 | IEEE出版 | EI 、Scopus稳定检索】第七届计算机视觉、图像与深度学习国际学术会议(CVIDL 2026)
第七届计算机视觉、图像与深度学习国际学术会议(CVIDL 2026) 2026 7th International Conference on Computer Vision, Image and Deep Learning 2026年5月22-24日 | 中国-长沙 大会官网 : www.cvidl.org 截稿时间:见官网&…...

【论文学习】利用卫星观测数据的 X-STILT 模型详解
目录 J2018-提出 X-STILT (v1)模型( C O 2 CO_2 CO2总量反演) 2. 核心研究方法:X-STILT 模型 3. 使用的数据资源 4. 案例研究:沙特阿拉伯利雅得 J2022-改进 X-STILT 模型( C O 2 CO_2 CO2部门归因) 1. 研究核心:利用 C O 2 CO_2 CO2 与 C O CO CO 的排放比例 2.…...
)
微信小程序地图开发避坑指南:从获取用户位置到添加自定义标记点(附完整代码)
微信小程序地图开发实战:避开那些让你熬夜的坑 第一次在小程序里集成地图功能时,我天真地以为只要拖个组件就能搞定。直到凌晨三点还在调试那个死活不显示的标记点,才明白地图开发远没有想象中简单。如果你也正在经历这种痛苦,这篇…...

kubectl-debug性能优化:如何配置资源限制和启动参数
kubectl-debug性能优化:如何配置资源限制和启动参数 【免费下载链接】kubectl-debug This repository is no longer maintained, please checkout https://github.com/JamesTGrant/kubectl-debug. 项目地址: https://gitcode.com/gh_mirrors/ku/kubectl-debug …...
)
C# 14原生AOT部署Dify客户端:从“Hello World”到生产就绪的72小时极速落地路径(含Docker multi-stage构建+符号调试逆向指南)
第一章:C# 14原生AOT部署Dify客户端:全景认知与价值锚点C# 14 原生 AOT(Ahead-of-Time)编译能力标志着 .NET 生态在云原生与边缘计算场景中的重大演进。当这一能力与 Dify——一个开源、可私有化部署的大模型应用开发平台——深度…...