【C++】开源:tinyxml2解析库配置使用
😏★,°:.☆( ̄▽ ̄)/$:.°★ 😏
这篇文章主要介绍tinyxml2解析库配置使用。
无专精则不能成,无涉猎则不能通。——梁启超
欢迎来到我的博客,一起学习,共同进步。
喜欢的朋友可以关注一下,下次更新不迷路🥞
文章目录
- :smirk:1. 项目介绍
- :blush:2. 环境配置
- :satisfied:3. 使用说明
- 一个解析示例:
- xml地图解析
😏1. 项目介绍
项目Github地址:https://github.com/leethomason/tinyxml2
TinyXML-2是一个轻量级的C++库,用于解析和生成XML文档。它是对原始TinyXML库的改进和扩展,提供了更快速、更强大的XML处理功能。
以下是一些TinyXML-2的主要特点和功能:
1.简单易用:TinyXML-2提供了简单的API,使得解析和生成XML文档变得简单和直观。它使用类似于DOM(文档对象模型)的方法来操作XML元素,让开发者可以轻松地读取和写入XML数据。
2.轻巧高效:TinyXML-2具有非常小的内存占用和高性能。它专注于简单的XML操作,没有复杂的依赖关系,因此可以快速加载和处理大型XML文件。
3.支持解析和生成:TinyXML-2支持从字符串或文件中解析XML文档,并且可以生成格式良好的XML文本。它能够处理各种节点类型,如元素、属性、文本、注释等。
4.错误处理:TinyXML-2提供了灵活的错误处理机制。当解析XML时,它可以检测到语法错误、结构错误或其他问题,并提供相关的错误信息和异常处理机制。
5.跨平台:TinyXML-2可以在多个操作系统上使用,包括Windows、Linux和Mac OS等。
😊2. 环境配置
下面进行环境配置:
sudo apt-get install build-essential
git clone https://github.com/leethomason/tinyxml2.git
cd tinyxml2
make
sudo make install
# 查看版本
pkg-config --modversion tinyxml2
g++编译:g++ -o main main.cpp -ltinyxml2
😆3. 使用说明
下面进行使用分析:
一个解析示例:
#include <iostream>
#include <tinyxml2.h>int main() {// 创建一个XML文档对象tinyxml2::XMLDocument doc;// 加载XML文件if (doc.LoadFile("example.xml") == tinyxml2::XML_SUCCESS) {// 打印根元素名称tinyxml2::XMLElement* root = doc.FirstChildElement("Root");if (root) {std::cout << "Root Element: " << root->Name() << std::endl;}// 遍历并打印所有子元素tinyxml2::XMLElement* element = root->FirstChildElement();while (element) {std::cout << "Element Name: " << element->Name() << std::endl;// 获取元素的属性值const char* attributeValue = element->Attribute("attribute");if (attributeValue) {std::cout << "Attribute Value: " << attributeValue << std::endl;}// 获取元素的文本内容const char* textValue = element->GetText();if (textValue) {std::cout << "Text Value: " << textValue << std::endl;}element = element->NextSiblingElement();}}// 创建一个新的XML文档tinyxml2::XMLDocument newDoc;// 创建根元素tinyxml2::XMLElement* newRoot = newDoc.NewElement("NewRoot");newDoc.InsertFirstChild(newRoot);// 创建子元素tinyxml2::XMLElement* newElement = newDoc.NewElement("NewElement");newRoot->InsertEndChild(newElement);// 设置属性值newElement->SetAttribute("attribute", "value");// 设置文本内容newElement->SetText("Hello, World!");// 保存XML文件newDoc.SaveFile("new_example.xml");return 0;
}
xml地图解析
项目github地址(推荐学习):https://github.com/chenyongzhe/HdmapEngine
这个地图解析引擎项目用tinyxml2库解析apollo opendrive xml格式的高精地图,包含道路、车道连接关系、信号灯等元素,以及车道搜索、wgs84转东北天等工具,最后可用python matplotlib将处理完的地图show出来。
下面是一些解析示例:
// 读取xml文件,去判断Node
bool HdmapEngine::paserApolloxml(const char *file_name)
{tinyxml2::XMLDocument doc;if (doc.LoadFile(file_name) != XML_SUCCESS)return false;XMLElement *root = doc.RootElement();XMLElement *roadNode = root->FirstChildElement("road"); // find road nodewhile (roadNode != NULL){string name = roadNode->Attribute("name"); // road name// if name include string("Road") or string("junction")if (name.substr(0, 4) == "Road"){// cout << roadNode->Attribute("id") << endl;paserRoad(roadNode);}else if (name.substr(0, 8) == "junction"){paserJunction(roadNode);}roadNode = roadNode->NextSiblingElement();}// 创建搜索树vector<Point> centerLintePoints;for (int i = 0; i < laneList.size(); i++){// if(laneList[i].centerLinePoints!=NULL)for (int j = 0; j < laneList[i]->centerLinePoints.size(); j++){centerLintePoints.push_back(*(laneList[i]->centerLinePoints[j]));}}// cout<<"centerpoint size "<<centerLintePoints.size()<<endl;tree->read_in(centerLintePoints);// cout<<"centerpoint size "<<centerLintePoints.size()<<endl;// cout<<"创建搜索树成功"<<endl;// printRoad();return true;
}
// 解析road元素
bool HdmapEngine::paserRoad(XMLElement *roadNode)
{string predecessor_elementType;int predecessor_id = INT_MAX;int successor_id = INT_MAX;string successor_elementType;double road_length;road_id = atoi(roadNode->Attribute("id"));XMLElement *linkNode = roadNode->FirstChildElement("link");XMLElement *lanes = roadNode->FirstChildElement("lanes");XMLElement *laneSection = lanes->FirstChildElement("laneSection");XMLElement *sucNode = linkNode->FirstChildElement("successor");if (sucNode != NULL){// cout << sucNode->Attribute("elementType") << " " << sucNode->Attribute("elementId") << endl;successor_elementType = sucNode->Attribute("elementType");successor_id = atoi(sucNode->Attribute("elementId"));}XMLElement *preNode = linkNode->FirstChildElement("predecessor");if (preNode != NULL){// cout << preNode->Attribute("elementType") << " " << preNode->Attribute("elementId") << endl;predecessor_elementType = preNode->Attribute("elementType");predecessor_id = atoi(preNode->Attribute("elementId"));}Road *road = new Road(road_id, predecessor_elementType, predecessor_id, successor_elementType, successor_id);int jun = atoi(roadNode->Attribute("junction"));if (jun == -1){// 非路口道路road->isJunctionRoad = false;}else{// 路口道路road->isJunctionRoad = true;}laneSection_id = 0;// lanesectionwhile (laneSection != NULL){paserLaneSection(laneSection, road);laneSection_id++;laneSection = laneSection->NextSiblingElement("laneSection");}// 解析stoplinepaserStopLineCrosswalk(roadNode, road);road->length = road->getRoadLength();roadList.push_back(road);roadMap[road->road_id] = road;return true;
}
gps转xyz工具部分:
bool TransformUtil::gps2xyz(const double &longitude, const double &latitude, const double &altitude,Eigen::Vector3d &xyz)
{// gps << gps_msg.longitude, gps_msg.latitude, gps_msg.altitude;Eigen::Vector3d gps(longitude, latitude, altitude);Eigen::Vector3d gps_ECEF = WGS84toECEF(gps);// 处理GPS数据double rad_lon = gps_origin_[1] / 180 * M_PI;double rad_lat = gps_origin_[0] / 180 * M_PI;double sin_lon = sin(rad_lon);double cos_lon = cos(rad_lon);double sin_lat = sin(rad_lat);double cos_lat = cos(rad_lat);Eigen::Matrix3d rot = Eigen::Matrix3d::Zero();// clang-format offrot << -sin_lon, cos_lon, 0,-sin_lat * cos_lon, -sin_lat * sin_lon, cos_lat,cos_lat * cos_lon, cos_lat * sin_lon, sin_lat;// clang-format onEigen::Vector3d diff_ECEF = gps_ECEF - origin_ECEF_;Eigen::Vector3d xyz_ECEF = rot * diff_ECEF;xyz << xyz_ECEF[0], xyz_ECEF[1], xyz_ECEF[2];return true;
}

以上。
相关文章:
【C++】开源:tinyxml2解析库配置使用
😏★,:.☆( ̄▽ ̄)/$:.★ 😏 这篇文章主要介绍tinyxml2解析库配置使用。 无专精则不能成,无涉猎则不能通。——梁启超 欢迎来到我的博客,一起学习,共同进步。 喜欢的朋友可以关注一下,…...
如何使用webpack打包一个库library,使用webpack打包sdk.
如何使用webpack打包一个库library 如果你需要自己封装一些包给别人使用,那么可以参考以下方法 初始化库 mkdir library cd library npm init -y经过以上步骤后会生成一个library文件夹,里面包含一个package.json文件。然后简单修改为如下所示: {&qu…...
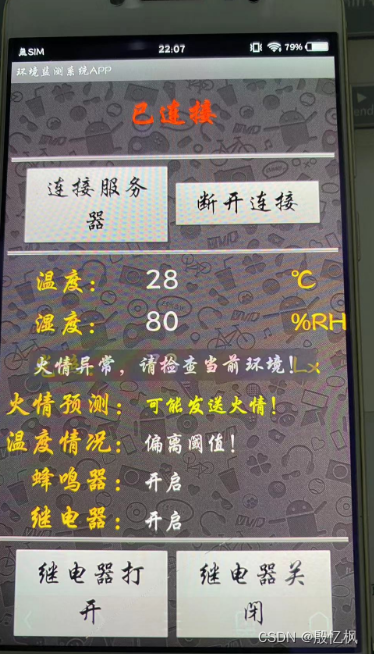
项目一:基于stm32的阿里云智慧消防监控系统
若该文为原创文章,转载请注明原文出处。 Hi,大家好,我是忆枫,今天向大家介绍一个单片机项目。 一、简介 智慧消防监控系统,是用于检测火灾,温度,烟雾的监控系统。以 stm32单片机为核心外加 MQ…...

【果树农药喷洒机器人】Part6:基于深度相机与分割掩膜的果树冠层体积探测方法
📢:如果你也对机器人、人工智能感兴趣,看来我们志同道合✨ 📢:不妨浏览一下我的博客主页【https://blog.csdn.net/weixin_51244852】 📢:文章若有幸对你有帮助,可点赞 👍…...

打印1到最大的n位数
目录 1.题目概述 2.题解 1.题目概述 输入数字 n,按顺序打印出从 1 到最大的 n 位十进制数。比如输入 3,则打印出 1、2、3 一直到最大的 3 位数 999。 1. 用返回一个整数列表来代替打印 2. n 为正整数,0 < n < 5 示例: 输入…...
设计模式行为型——状态模式
目录 状态模式的定义 状态模式的实现 状态模式角色 状态模式类图 状态模式举例 状态模式代码实现 状态模式的特点 优点 缺点 使用场景 注意事项 实际应用 在软件开发过程中,应用程序中的部分对象可能会根据不同的情况做出不同的行为,把这种对…...
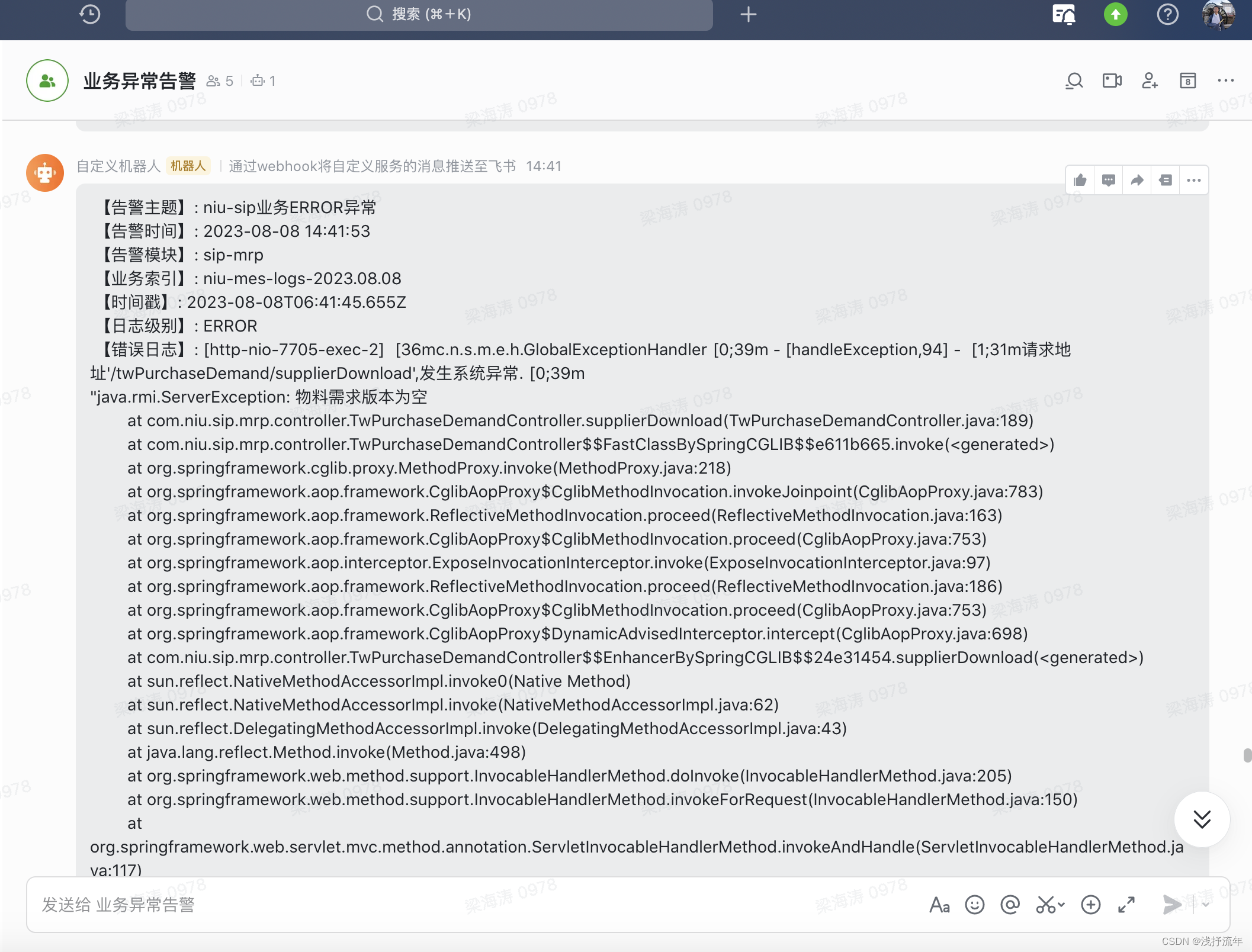
ElastAlert通过飞书机器人发送报警通知
前言 公司采用ELK架构搜集业务系统的运行日志,以前开发人员只有在业务出现问题的时候,才会去kibana上进行日志搜索操作,每次都是被用户告知系统出问题了,这简直是被啪啪打脸~ 于是痛定思痛,决定主动出击,…...
恒温碗语音芯片,具备数码管驱动与温度传感算法,WT2003H-B012
近年来,随着科技的飞速发展,智能家居产品已然成为了现代生活的一部分,为人们的生活带来了更多的便利和舒适。在这个不断演进的领域中,恒温碗多功能语音芯片——WT2003H-B012成为众多厂商的首选,为智能家居领域注入了全…...

新能源汽车需要检测哪些项目
截至2022年底,中国新能源车保有量达1310万辆,其中纯电动汽车保有量1045万辆。为把好新能源汽车安全关,我国新能源汽车除了完善的强制性产品认证型式实验外,还建立了“车企-地方-国家”逐级上报的三级监管体系实行新能源汽车全生命…...

VR内容定制 | VR内容中控管理平台可以带来哪些价值?
随着科技的不断发展,虚拟现实(VR)技术已经逐渐渗透到各个领域,其中教育领域也不例外。通过VR技术,学生可以身临其境地参与到各种场景中,获得更加直观、生动的学习体验。为了让教师更好地进行VR教学的设计和管理,提高教…...

篇十八:状态模式:状态驱动的行为
篇十八:"状态模式:状态驱动的行为" 开始本篇文章之前先推荐一个好用的学习工具,AIRIght,借助于AI助手工具,学习事半功倍。欢迎访问:http://airight.fun/。 另外有2本不错的关于设计模式的资料&…...
【Tomcat】(Tomcat 下载Tomcat 启动Tomcat 简单部署 基于Tomcat进行网站后端开发)
文章目录 Tomcat下载Tomcat启动Tomcat简单部署 基于Tomcat进行网站后端开发 Tomcat Tomcat 是一个 HTTP 服务器.HTTP 协议就是 HTTP 客户端和 HTTP 服务器之间的交互数据的格式. HTTP 服务器我们可以通过 Java Socket 来实现. 而 Tomcat 就是基于 Java 实现的一个开源免费,也是…...

简单动态字符串 sds
Redis 设计了简单动态字符串(Simple Dynamic String,SDS)的结构,用来表示 字符串。相比于 C 语言中的字符串实现,SDS 这种字符串的实现方式,会提升字符串的操 作效率,并且可以用来保存二进制数据…...

“深入剖析JVM内部原理:解密Java虚拟机的奥秘“
标题:深入剖析JVM内部原理:解密Java虚拟机的奥秘 摘要:本文将深入探讨Java虚拟机(JVM)的内部原理,包括其架构、内存管理、垃圾回收机制、即时编译器等关键组成部分。通过解密JVM的奥秘,我们将更…...
使用QT纯代码创建(查找)对话框详细步骤与代码
一、创建项目文件 打开Qt Creator->文件->新建文件或项目->选择Qt Widgets Application 为项目起名字 输入类的名字 二、 了解每个文件的作用 项目创建完毕之后就会出现以下几个文件,先来分别介绍以下这些文件的作用。 Headers->finddialog.h——很显…...

4945: 二进制转十进制
4945: 二进制转十进制 时间限制: 1.000 Sec 内存限制: 128 MB 提交: 520 解决: 335 [命题人:][下载数据: 30] 提交状态报告 题目描述 将二进制数转成十进制输出 输入 一行,一个二进制数,二进制数的位数小于32位。 输出 一个十进制的整数。…...

java后端技术汇总 + 中间件 + 架构思想
1. 华为OD机考题 答案 2023华为OD统一考试(AB卷)题库清单-带答案(持续更新) 2023年华为OD真题机考题库大全-带答案(持续更新) 2. 面试题 一手真实java面试题:2023年各大公司java面试真题汇总--…...

《机器学习系统:设计与实现》读书笔记一
最近几年一直在做算法工程的工作,对机器学习系统有所涉猎,也很感兴趣。近期发现一本开源书籍《机器学习系统:设计与实现》。去图书馆找了它的纸质版,发现内容不尽相同。在这里结合两者做一个读书笔记。本文是第一篇,主…...
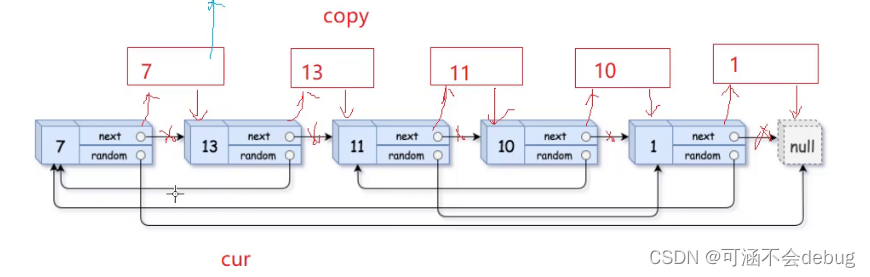
C语言单链表OJ题(较难)
一、链表分割 牛客网链接 题目描述: 现有一链表的头指针 ListNode* pHead,给一定值x,编写一段代码将所有小于x的结点排在其余结点之前,且不能改变原来的数据顺序,返回重新排列后的链表的头指针。 思路:…...

工业巡检ar沉浸式互动培训体验实现更加直观、生动的流程展示
以往的工业手工巡检效率极低,错误率偏高,漏检问题严重,会因为现场人员对机械设备的早期维护、操作不会,而影响正常交付和服务,智慧工业是工业智能化和信息化的重要体现,在巡检方面自然也要同步提升…...

Multisim仿真 vs 洞洞板实战:我的双路稳压电源项目翻车与复盘全记录
Multisim仿真与洞洞板实战:双路稳压电源的翻车启示录 仿真软件里完美的电路设计,在现实中却频频翻车——这几乎是每个硬件工程师的必经之路。去年冬天,我也经历了这样一场"理想很丰满,现实很骨感"的双路稳压电源项目。当…...

区块链系统设计思考
区块链系统设计思考:构建信任与效率的未来 区块链技术自诞生以来,以其去中心化、不可篡改和透明性等特性,重塑了金融、供应链、物联网等领域的信任机制。设计一个高效、安全且可扩展的区块链系统并非易事,需要从多个维度进行深入…...

Primo内置代码编辑器深度解析:实时预览与智能开发体验
Primo内置代码编辑器深度解析:实时预览与智能开发体验 【免费下载链接】primo Component-based CMS with a built-in IDE, visual editing, and static site generation. One server, unlimited sites. 项目地址: https://gitcode.com/gh_mirrors/pr/primo P…...

适合放在简历上的开源项目与练手项目Idea清单
在竞争激烈的求职市场中,一份亮眼的简历往往能让你脱颖而出。而开源项目和练手项目正是展示你技术实力和实践经验的重要砝码。无论是参与知名开源项目,还是自主开发练手项目,都能体现你的编程能力、解决问题的思维以及对技术的热情。本文将为…...

别再为BGA扇出挠头了!用Allegro的无盘设计,轻松搞定0.8mm间距芯片的走线
突破BGA布线极限:Allegro无盘设计实战指南 在当今高速PCB设计领域,BGA封装芯片的布线挑战日益严峻。当面对0.8mm甚至更小间距的BGA芯片时,传统布线方法往往捉襟见肘——差分对无法保持等长、电源通道拥挤不堪、过孔区域几乎无处下脚。这些困境…...

q q q q q q q q q q q q q q q q q q q
q q q q q q q q q...

如何快速解密QQ音乐加密文件:qmcdump完全指南
如何快速解密QQ音乐加密文件:qmcdump完全指南 【免费下载链接】qmcdump 一个简单的QQ音乐解码(qmcflac/qmc0/qmc3 转 flac/mp3),仅为个人学习参考用。 项目地址: https://gitcode.com/gh_mirrors/qm/qmcdump 你是否曾经下载…...

3步掌握AI语音克隆:RVC变声神器零基础完整教程
3步掌握AI语音克隆:RVC变声神器零基础完整教程 【免费下载链接】Retrieval-based-Voice-Conversion-WebUI Easily train a good VC model with voice data < 10 mins! 项目地址: https://gitcode.com/GitHub_Trending/re/Retrieval-based-Voice-Conversion-Web…...

告别单窗口!MPLAB X IDE多开与MCC配置冲突的保姆级解决方案
告别单窗口!MPLAB X IDE多开与MCC配置冲突的保姆级解决方案 对于使用Microchip MCU进行嵌入式开发的工程师来说,MPLAB X IDE是日常工作中不可或缺的开发工具。然而,当我们需要同时处理多个项目、进行代码对比或调试时,IDE默认不支…...

F2跨平台部署指南:在Windows、macOS和Linux上的完整安装教程
F2跨平台部署指南:在Windows、macOS和Linux上的完整安装教程 【免费下载链接】f2 F2 is a cross-platform command-line tool for batch renaming files and directories quickly and safely. Written in Go! 项目地址: https://gitcode.com/gh_mirrors/f21/f2 …...