ROS2 入门应用 引用自定义消息(Python)
ROS2 入门应用 引用自定义消息(Python)
- 1. 查看自定义消息
- 2. 修改话题发布
- 3. 修改话题订阅
- 4. 修改依赖关系
- 5. 编译和运行
1. 查看自定义消息
引用在《ROS2 入门应用 创建自定义接口》中自定义的消息Sphere.msg
ros2 interface show tutorial_interfaces/msg/Sphere# geometry_msgs/Point center
# float64 x
# float64 y
# float64 z
# float64 radius
需要对《ROS2 入门应用 发布和订阅(Python)》中创建的发布者/订阅者功能包稍作修改
cd ~/ros2_ws/src/py_pubsub/py_pubsub
将把数值的字符串更改为球体半径
2. 修改话题发布
修改publisher_member_function.py话题发布源文件,涉及话题类型变更和应用变化
import rclpy
from rclpy.node import Nodefrom tutorial_interfaces.msg import Sphere # CHANGEclass MinimalPublisher(Node):'''发布器节点类'''def __init__(self):# 初始化节点名、发布器、每0.5s回调的定时器和计数器super().__init__('minimal_publisher')self.publisher_ = self.create_publisher(Sphere, 'topic', 10) # CHANGEtimer_period = 0.5 self.timer = self.create_timer(timer_period, self.timer_callback)self.i = 0def timer_callback(self):'''定时器回调函数'''# 打印并发布字符串附加计数器值的信息msg = Sphere() # CHANGEmsg.radius = float(self.i) # CHANGEself.publisher_.publish(msg)self.get_logger().info('Publishing: "%d"' % msg.radius) # CHANGEself.i += 1def main(args=None):# 初始化ROS2rclpy.init(args=args)# 创建节点minimal_publisher = MinimalPublisher()# 运行节点rclpy.spin(minimal_publisher)# 销毁节点,退出ROS2minimal_publisher.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
3. 修改话题订阅
修改subscriber_member_function.py话题订阅源文件,涉及话题类型变更和应用变化
import rclpy
from rclpy.node import Nodefrom tutorial_interfaces.msg import Sphere # CHANGEclass MinimalSubscriber(Node):'''订阅器节点类'''def __init__(self):# 初始化节点super().__init__('minimal_subscriber')# 初始化订阅器,话题类型Sphere,话题topic,回调函数listener_callbackself.subscription = self.create_subscription(Sphere, 'topic', self.listener_callback, 10) # CHANGEself.subscription # 防止未使用变量警告def listener_callback(self, msg):'''订阅器回调函数'''# 打印订阅话题的消息数据self.get_logger().info('I heard: "%d"' % msg.radius) # CHANGEdef main(args=None):# 初始化ROS2rclpy.init(args=args)# 创建节点minimal_subscriber = MinimalSubscriber()# 运行节点rclpy.spin(minimal_subscriber)# 销毁节点,退出ROS2minimal_subscriber.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()
4. 修改依赖关系
在package.xml清单文件中,添加对自定义消息的依赖项的声明
<exec_depend>tutorial_interfaces</exec_depend>
Python源文件应用不涉及到CMake编译信息,因此不用修改
CMakeLists.txt编译文件
setup.py安装软件包说明的程序入口点entry_points字段在之前已经设置完成
entry_points={'console_scripts': ['talker = py_pubsub.publisher_member_function:main','listener = py_pubsub.subscriber_member_function:main',],
},
5. 编译和运行
进入工作空间根目录
cd ~/ros2_ws
编译:
colcon build --packages-select py_pubsub
打开一个新终端,运行话题发布节点:
ros2 run py_pubsub talker# [INFO] [minimal_publisher]: Publishing: "0"
# [INFO] [minimal_publisher]: Publishing: "1"
# [INFO] [minimal_publisher]: Publishing: "2"
打开一个新终端,运行话题订阅节点:
ros2 run py_pubsub listener# [INFO] [minimal_subscriber]: I heard: "10"
# [INFO] [minimal_subscriber]: I heard: "11"
# [INFO] [minimal_subscriber]: I heard: "12"
谢谢
相关文章:
)
ROS2 入门应用 引用自定义消息(Python)
ROS2 入门应用 引用自定义消息(Python)1. 查看自定义消息2. 修改话题发布3. 修改话题订阅4. 修改依赖关系5. 编译和运行1. 查看自定义消息 引用在《ROS2 入门应用 创建自定义接口》中自定义的消息Sphere.msg ros2 interface show tutorial_interfaces/…...
SmS-Activate一款好用的短信验证码接收工具
前言 有些国外应用在使用应用上的功能时需要注册账号,由于某种不可抗因素,我们的手机号一般不支持注册,接收不到信息验证码,于是我们可以使用SmS-Activate提供的服务,使用$实现我们的需求(大概一次验证1-5…...
)
SpringBoot+Elasticsearch按日期实现动态创建索引(分表)
😊 作者: 一恍过去💖 主页: https://blog.csdn.net/zhuocailing3390🎊 社区: Java技术栈交流🎉 主题: SpringBootElasticsearch按日期实现动态创建索引(分表)⏱️ 创作时间&…...
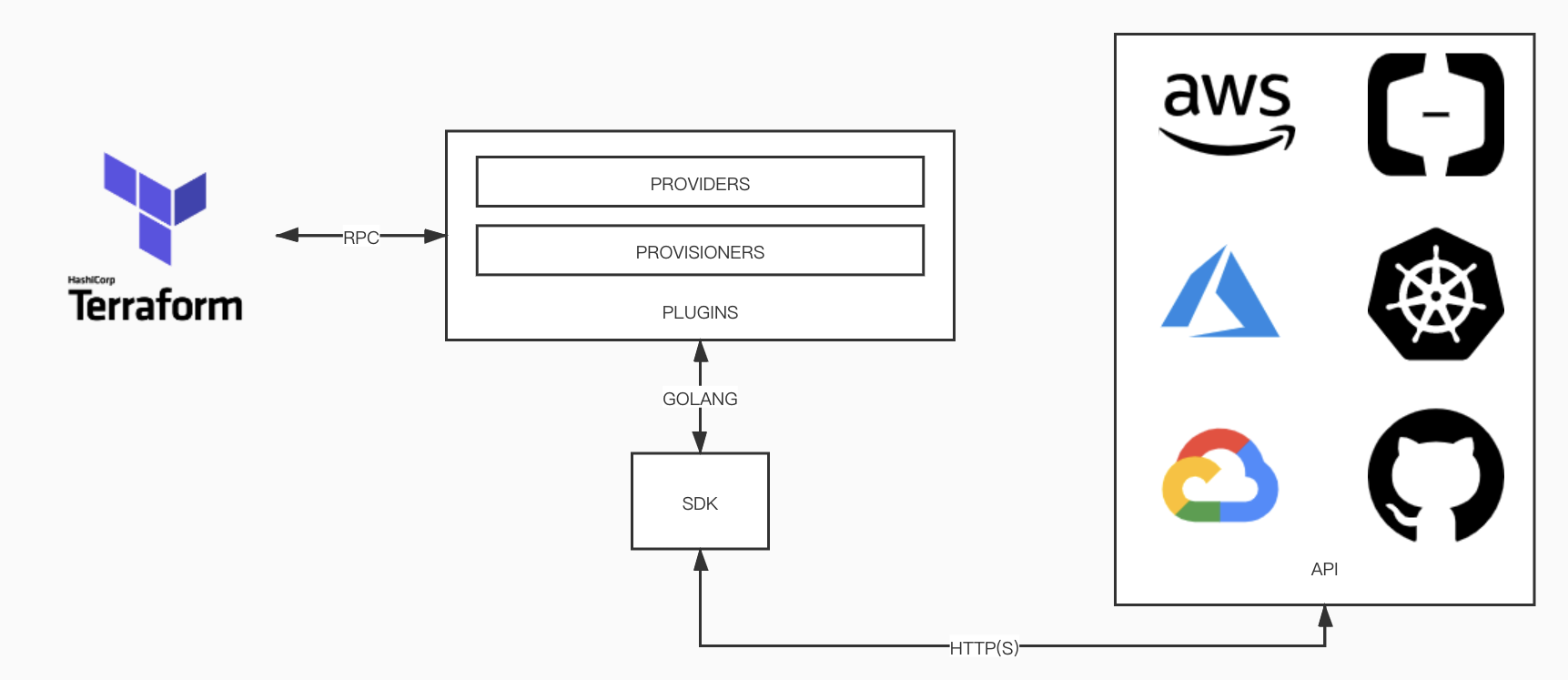
Terraform基础入门 (Infrastructure as Code)
文章目录前言介绍Terraform 术语Terraform 如何工作关于provider安装开启本地缓存demo1(dockernginx)demo2(dockerzookeeperkafka)参考资料前言 像写代码一样管理基础设施。 Terraform 使用较为高级的配置文件语法来描述基础设施,这个特性让你对配置文件进行版本化…...
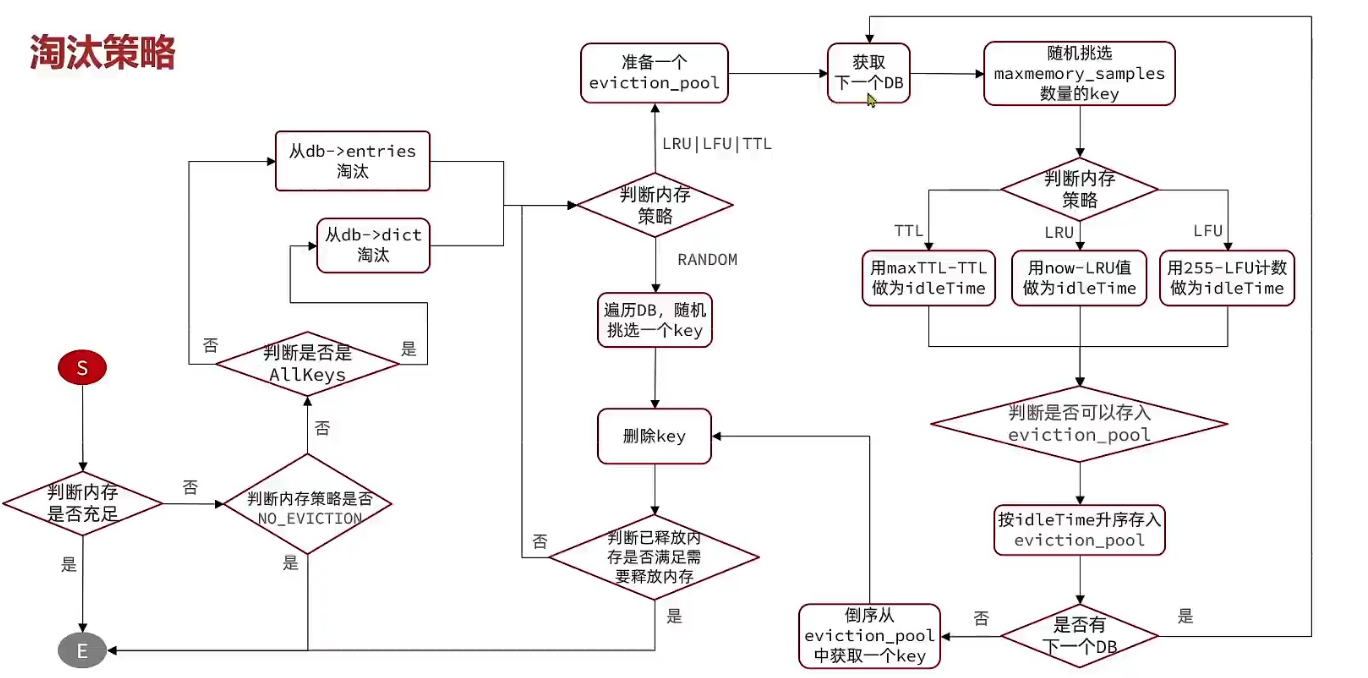
Redis内存回收
Redis 内存回收 Redis之所以性能很强,最主要的原因是基于内存存储,然而单节点的Redis其内存大小不宜过大,会影响持久化或主从同步性能 可以通过修改配置文件来设置Redis的最大内存 maxmemory <bytes>当内存达到上限时,就…...
)
ROS2 入门应用 引用自定义消息(C++)
ROS2 入门应用 引用自定义消息(C)1. 查看自定义消息2. 修改话题发布3. 修改话题订阅4. 修改依赖关系5. 修改编译信息6. 编译和运行1. 查看自定义消息 引用在《ROS2 入门应用 创建自定义接口》中自定义的消息Sphere.msg ros2 interface show tutorial_i…...

Spring中的数据校验
数据校验基础 参考: Java Bean Validation 规范 Spring对Bean Validation的支持 Spring定义了一个接口org.springframework.validation.Validator,用于应用相关的对象的校验器。 这个接口完全从基础设施或者上下文中脱离的,这意味着它没有…...

python批量翻译excel表格中的英文
python批量翻译excel表格中的英文需求背景主要设计分析具体实现表格操作请求百度翻译api多线程控制台显示进度完整源码需求背景 女朋友的论文需要爬取YouTube视频热评,但爬下来的都是外文。 主要设计 读取一个表格文件,获取需要翻译的文本 使用百度翻译…...
基于SSM框架的RBAC权限系统设计与 实现
基于SSM框架的RBAC权限系统设计与 实现 ✌全网粉丝20W,csdn特邀作者、博客专家、CSDN新星计划导师、java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取项目下载方式🍅 一、项目背景…...
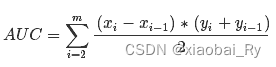
目标检测各常见评价指标详解
注:本文仅供学习,未经同意请勿转载 说明:该博客来源于xiaobai_Ry:2020年3月笔记 对应的PDF下载链接在:待上传 目录 常见的评价指标 准确率 (Accuracy) 混淆矩阵 (Confusion Matrixÿ…...

深入讲解Kubernetes架构-控制器
在机器人技术和自动化领域,控制回路(Control Loop)是一个非终止回路,用于调节系统状态。这是一个控制环的例子:房间里的温度自动调节器。当你设置了温度,告诉了温度自动调节器你的期望状态(Desi…...

Urho3D本地化 国际化
本地化子系统提供了创建多语言应用程序的简单方法。 初始化 在使用子系统之前,需要加载本地化字符串集合。通常的做法是在应用程序启动时执行此操作。可以加载多个集合文件,每个集合文件只能定义一种或多种语言。例如: Localization* l10n…...
千锋教育嵌入式物联网教程之系统编程篇学习-04
目录 alarm函数 raise函数 abort函数 pause函数 转折点 signal函数 可重入函数 信号集 sigemptyset() sigfillset sigismember() sigaddset() sigdelset() 代码讲解 信号阻塞集 sigprocmask() alarm函数 相当于一个闹钟,默认动作是终止调用alarm函数的进…...

【运维】什么是 DevOps?
文章目录什么是 DevOps?如何实现 DevOpsDevOps工作原理: DevOps生命周期DevOps 文化DevOps 工具:构建 DevOps 工具链DevOps 和云原生开发什么是 DevSecOps?DevOps 和站点可靠性工程 (SRE)什么是 DevOps? DevOps 通过结…...

【C++入门】引用、内联函数、auto关键字、基于范围的for循环(C++11)、指针空值nullptr(C++11)
文章目录引用引用概念引用特性引用使用场景常引用内联函数宏的优缺点?C有哪些技术替代宏?auto关键字auto不能推导的场景基于范围的for循环(C11)指针空值nullptr(C11)引用 引用概念 引用不是新定义一个变量,而是给已存在变量取了一个别名&…...
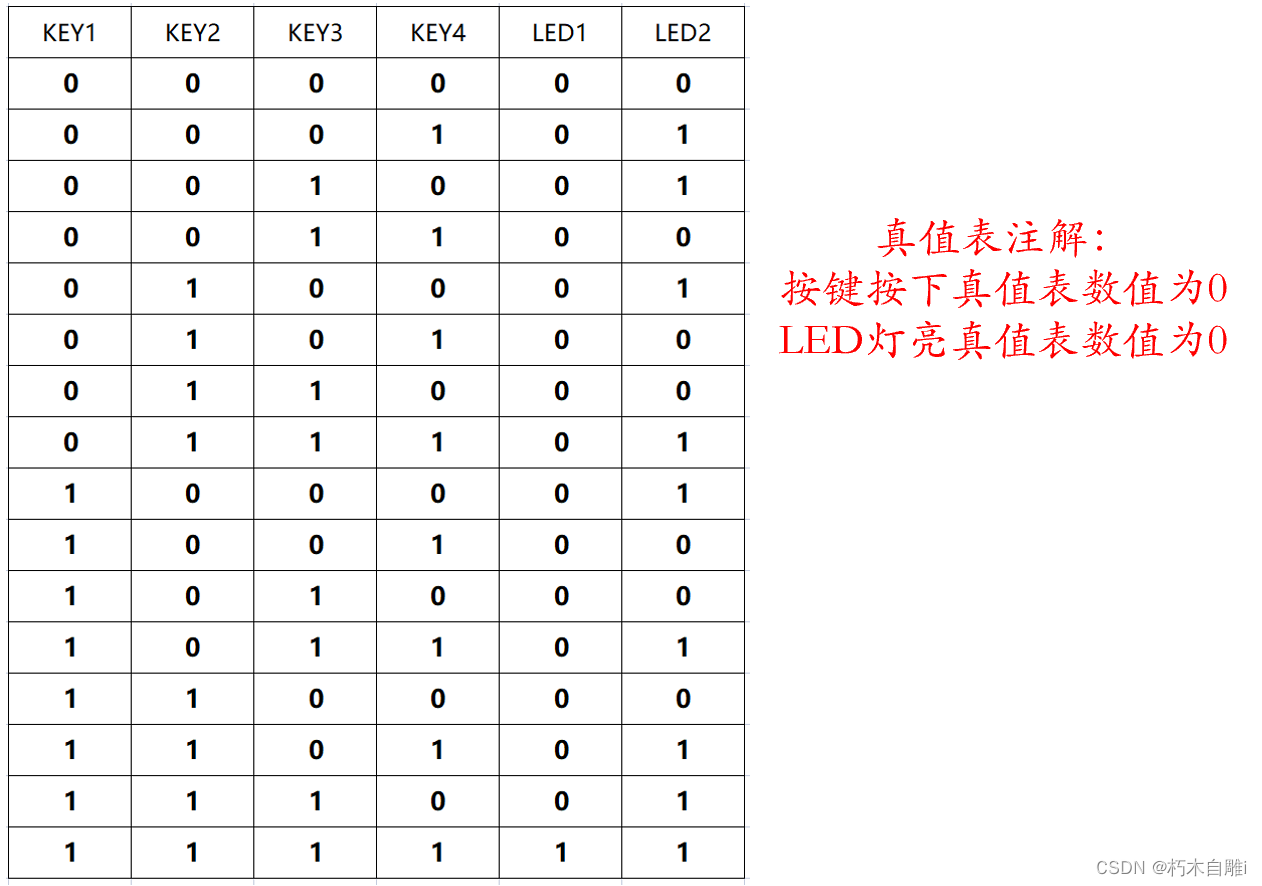
《FPGA学习》->多个按键控制LED灯
🍎与其担心未来,不如现在好好努力。在这条路上,只有奋斗才能给你安全感。你若努力,全世界都会为你让路。本次项目任务,利用开发板上的4个按键KEY1,KEY2,KEY3,KEY4和2个LED灯LED1&…...
-项目与程序结构(2))
vb.net计算之.net core基础(4)-项目与程序结构(2)
目录 Namespace 语句Visual Basic 中的命名空间完全限定名命名空间可以定义什么全局关键字命名规范条件编译拆分和合并语句拆分成多行在同一行上放置多个语句为代码行添加标签注释串联成员访问运算符点运算符 `.`感叹号 `!`运算符Me 关键字MyMyBaseMyClassNamespace 语句 <…...
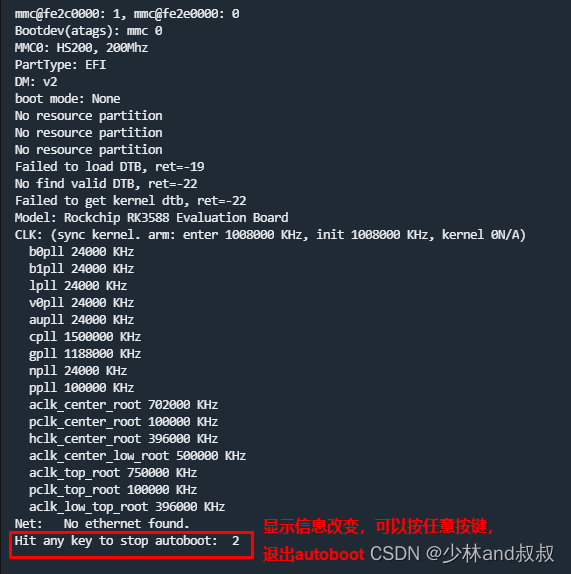
基于RK3588的嵌入式linux系统开发(五)——uboot优化修改(按任意按键停止autoboot)
我们通常情况下,芯片进入uboot后,会根据设置的bootdelay时间进行倒数计数。这时候在终端按任意键,即可退出autoboot,进入uboot的命令行模式。 官方提供的uboot源码中,为了防止调试串口干扰导致不能进入系统,…...

Lumerical---在FDTD和MODE工程中的PML边界条件
Lumerical---在FDTD和MODE工程中的PML边界条件 引言PML边界条件实现原理PML 类型PML 配置文件PML 配置文件选项Standard(标准)Stabilized(稳定性)Steep AngleCustom(陡角)对于不同的边界使用不同的配置FDE,varFDTD和FDTD SolverPML 参数阅读这篇前,推荐阅读边界条件综述…...

论文投稿指南——中文核心期刊推荐(社会学)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...
_数据预处理篇(1)_格式转换与清洗)
量化交易backtrader实践(二)_数据预处理篇(1)_格式转换与清洗
1. 数据预处理的重要性 在量化交易中,数据预处理就像做菜前的食材准备阶段。想象一下,如果你要做一道红烧肉,却直接拿刚从冰箱取出的冻肉下锅,结果可想而知。同样地,未经处理的原始金融数据直接喂给backtrader…...

intv_ai_mk11生成效果:对‘提高工作效率’需求输出结构清晰、可执行的5条建议
intv_ai_mk11生成效果:对"提高工作效率"需求输出结构清晰、可执行的5条建议 1. 模型介绍与使用场景 intv_ai_mk11是一个基于Llama架构的中等规模文本生成模型,特别适合处理通用问答、文本改写、解释说明等任务。这个模型已经完成本地部署&am…...

算法部署设计,Sm3国密算法的硬件ip设计,纯v手写代码,图一为ip接口,图二为资源消耗
算法部署设计,Sm3国密算法的硬件ip设计,纯v手写代码,图一为ip接口,图二为资源消耗,图三四为封装为axilite接口并在开发版下板测试,图五为开发版实测结果 直接联系内容包括:sm3的软件python实现代码…...
基于GOOSE - Transformer - LSTM的数据回归预测探索
基于GOOSE-Transformer-LSTM的数据回归预测 模型结合Transformer的全局注意力机制和LSTM的短期记忆及序列处理能力 首先,采用Transformer自注意力机制捕捉数据的全局依赖性,并输出一个经过全局上下文编码的表示;然后,采用2024年最…...

TCT亚洲展|直击3D打印前沿盛宴,解锁增材制造新趋势
近日,2026 TCT亚洲展在上海国家会展中心圆满落幕,作为亚太地区规模最大、专业性最强的3D打印与增材制造行业盛会,本届展会汇聚全球550余家头部展商,集中呈现了从工业级设备、高性能材料到全场景应用方案的全产业链创新成果&#x…...

StructBERT文本相似度模型Java开发实战:SpringBoot集成与API调用
StructBERT文本相似度模型Java开发实战:SpringBoot集成与API调用 你是不是也遇到过这样的场景?用户搜索“苹果手机”,你希望系统不仅能返回iPhone,还能识别出“苹果公司手机”、“Apple iPhone”这些同义查询。或者,在…...

群晖更换RAID类型无需重建服务,保持Volume磁盘盘符不变
我的环境:DSM型号:DS3617xs(黑群晖)系统版本:DSM 7.1.1-42962 Update 6硬盘数据库更新时间:2026-01-23更改前磁盘序号(btrfs):Raid1(volume1)&…...
)
从拆解到驱动:手把手教你用IMX6ULL驱动OV5640摄像头模块(附完整代码)
从拆解到驱动:手把手教你用IMX6ULL驱动OV5640摄像头模块(附完整代码) 1. 硬件连接与接口解析 OV5640作为一款500万像素的CMOS图像传感器,支持DVP和MIPI两种接口模式。在IMX6ULL平台上,我们选择使用DVP并行接口进行连接…...

新手入门服务器:用快马生成你的第一个xshell等效连接程序
作为一个刚接触服务器运维的新手,第一次使用xshell这类工具时,面对各种专业术语和复杂操作确实容易一头雾水。最近我发现用InsCode(快马)平台生成学习项目特别适合入门,今天就分享一下如何通过可运行的代码实例来理解SSH连接的核心概念。 理解…...

3步实现AI智能背景移除:开源工具让透明GIF制作变得如此简单
3步实现AI智能背景移除:开源工具让透明GIF制作变得如此简单 【免费下载链接】backgroundremover Background Remover lets you Remove Background from images and video using AI with a simple command line interface that is free and open source. 项目地址:…...