目标检测各常见评价指标详解
注:本文仅供学习,未经同意请勿转载
说明:该博客来源于xiaobai_Ry:2020年3月笔记
对应的PDF下载链接在:待上传
目录
常见的评价指标
准确率 (Accuracy)
混淆矩阵 (Confusion Matrix)
精确率(Precision)与召回率(Recall)
重点:平均精度(Average-Precision,AP)与 mean Average Precision(mAP)
IoU
ROC(Receiver Operating Characteristic)曲线与AUC(Area Under Curve)
PR曲线和ROC曲线比较
非极大值抑制(NMS)
常见的评价指标
准确率 (Accuracy),混淆矩阵 (Confusion Matrix),精确率(Precision),召回率(Recall),平均正确率(AP),mean Average Precision(mAP),交除并(IoU),ROC + AUC,非极大值抑制(NMS)。
准确率 (Accuracy)
(1)概念:分对的样本数除以所有的样本数 ,即:准确(分类)率 = 正确预测的正反例数 / 总数。
(2)作用:一般用来评估模型的全局准确程度,不能包含太多信息,无法全面评价一个模型性能。
混淆矩阵 (Confusion Matrix)
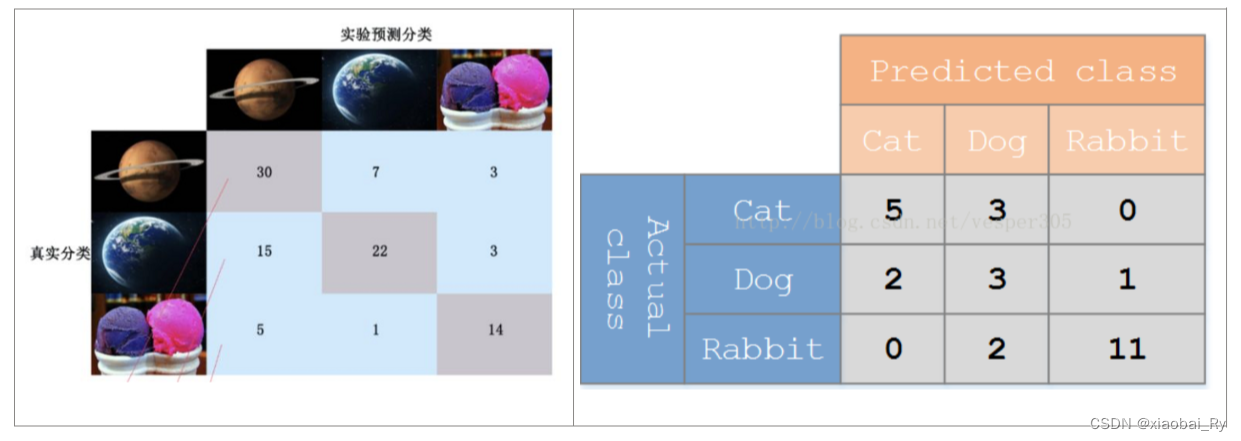
(1)概念:混淆矩阵又被称为错误矩阵, 在每个类别下,模型预测错误的结果数量,以及错误预测的类别和正确预测的数量都在一个矩阵下面显示出来,方便直观的评估模型分类的结果。其中,横轴是模型预测的类别数量统计,纵轴是数据真实标签的数量统计。
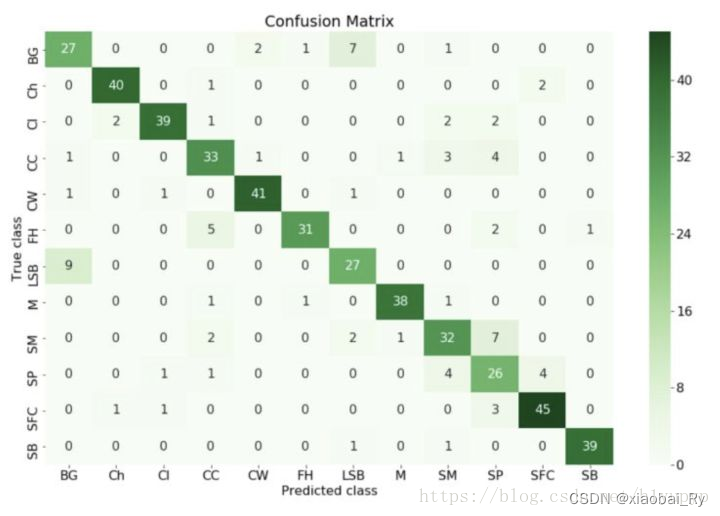
(2)对角线,表示模型预测和数据标签一致的数目,所以对角线之和除以测试集总数就是准确率。对角线上数字越大越好,在可视化结果中颜色越深,说明模型在该类的预测准确率越高。如果按行来看,每行不在对角线位置的就是错误预测的类别。总的来说,我们希望对角线越高越好,非对角线越低越好。
精确率(Precision)与召回率(Recall)
- True positives(TP) : 正样本被正确识别为正样本;预测为positive ground truth为True。
- True negatives: 负样本被正确识别为负样本; 预测为positive 但ground truth 为negative。
- False positives: 假的正样本,即负样本被错误识别为正样本; 预测为positive 但ground truth 为negative
- False negatives: 假的负样本,即正样本被错误识别为负样本;预测为negative ground truth也为False。
- precision查准率: 指预测为positive中,ground truth是positive所占的比例 (TP/(TP+FP)),该值越大越好,1为理想状态
- recall查全率:指测试集中所有正样本样例中,被正确识别为正样本的比例。该值越大越好,1为理想状态。
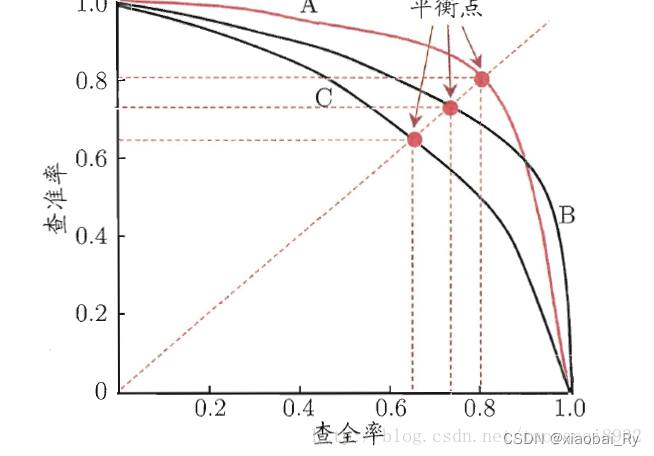
- Precision-recall 曲线:改变识别阈值,使得系统依次能够识别前K张图片,阈值的变化同时会导致Precision与Recall值发生变化,从而得到曲线
- 如果一个分类器的性能比较好,那么它应该有如下的表现:在Recall值增长的同时,Precision的值保持在一个很高的水平。而性能比较差的分类器可能会损失很多Precision值才能换来Recall值的提高。通常情况下,文章中都会使用Precision-recall曲线,来显示出分类器在Precision与Recall之间的权衡。
- F1-score: 将precision 和recall合成一个指标,越大越好
- accuracy: 所有预测结果与实际结果一样的样本/所有样本
重点:平均精度(Average-Precision,AP)与 mean Average Precision(mAP)
AP就是Precision-recall 曲线下面的面积,通常来说一个越好的分类器,AP值越高。
mAP是多个类别AP的平均值。这个mean的意思是对每个类的AP再求平均,得到的就是mAP的值,mAP的大小一定在[0,1]区间,越大越好。该指标是目标检测算法中最重要的一个。
在正样本非常少的情况下,PR表现的效果会更好。
IoU

ROC(Receiver Operating Characteristic)曲线与AUC(Area Under Curve)
ROC曲线:
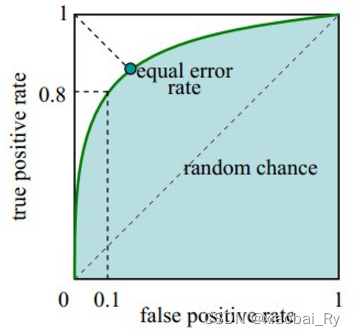
- 横坐标:假正率(False positive rate, FPR),FPR = FP / [ FP + TN] ,代表所有负样本中错误预测为正样本的概率,假警报率;
- 纵坐标:真正率(True positive rate, TPR),TPR = TP / [ TP + FN] ,代表所有正样本中预测正确的概率,命中率。
对角线对应于随机猜测模型,而(0,1)对应于所有整理排在所有反例之前的理想模型。曲线越接近左上角,分类器的性能越好。
ROC曲线有个很好的特性:当测试集中的正负样本的分布变化的时候,ROC曲线能够保持不变。在实际的数据集中经常会出现类不平衡(class imbalance)现象,即负样本比正样本多很多(或者相反),而且测试数据中的正负样本的分布也可能随着时间变化。
ROC曲线绘制:
(1)根据每个测试样本属于正样本的概率值从大到小排序;
(2)从高到低,依次将“Score”值作为阈值threshold,当测试样本属于正样本的概率大于或等于这个threshold时,我们认为它为正样本,否则为负样本;
(3)每次选取一个不同的threshold,我们就可以得到一组FPR和TPR,即ROC曲线上的一点。
当我们将threshold设置为1和0时,分别可以得到ROC曲线上的(0,0)和(1,1)两个点。将这些(FPR,TPR)对连接起来,就得到了ROC曲线。当threshold取值越多,ROC曲线越平滑。
AUC(Area Under Curve)即为ROC曲线下的面积。AUC越接近于1,分类器性能越好。
物理意义:首先AUC值是一个概率值,当你随机挑选一个正样本以及一个负样本,当前的分类算法根据计算得到的Score值将这个正样本排在负样本前面的概率就是AUC值。当然,AUC值越大,当前的分类算法越有可能将正样本排在负样本前面,即能够更好的分类。
计算公式:就是求曲线下矩形面积。
PR曲线和ROC曲线比较
ROC曲线特点:
(1)优点:当测试集中的正负样本的分布变化的时候,ROC曲线能够保持不变。因为TPR聚焦于正例,FPR聚焦于与负例,使其成为一个比较均衡的评估方法。
在实际的数据集中经常会出现类不平衡(class imbalance)现象,即负样本比正样本多很多(或者相反),而且测试数据中的正负样本的分布也可能随着时间变化。
(2)缺点:上文提到ROC曲线的优点是不会随着类别分布的改变而改变,但这在某种程度上也是其缺点。因为负例N增加了很多,而曲线却没变,这等于产生了大量FP。像信息检索中如果主要关心正例的预测准确性的话,这就不可接受了。在类别不平衡的背景下,负例的数目众多致使FPR的增长不明显,导致ROC曲线呈现一个过分乐观的效果估计。ROC曲线的横轴采用FPR,根据FPR ,当负例N的数量远超正例P时,FP的大幅增长只能换来FPR的微小改变。结果是虽然大量负例被错判成正例,在ROC曲线上却无法直观地看出来。(当然也可以只分析ROC曲线左边一小段)
PR曲线:
(1)PR曲线使用了Precision,因此PR曲线的两个指标都聚焦于正例。类别不平衡问题中由于主要关心正例,所以在此情况下PR曲线被广泛认为优于ROC曲线。
非极大值抑制(NMS)
Non-Maximum Suppression就是需要根据score矩阵和region的坐标信息,从中找到置信度比较高的bounding box。对于有重叠在一起的预测框,只保留得分最高的那个。
(1)NMS计算出每一个bounding box的面积,然后根据score进行排序,把score最大的bounding box作为队列中首个要比较的对象;
(2)计算其余bounding box与当前最大score与box的IoU,去除IoU大于设定的阈值的bounding box,保留小的IoU得预测框;
(3)然后重复上面的过程,直至候选bounding box为空。
最终,检测了bounding box的过程中有两个阈值,一个就是IoU,另一个是在过程之后,从候选的bounding box中剔除score小于阈值的bounding box。需要注意的是:Non-Maximum Suppression一次处理一个类别,如果有N个类别,Non-Maximum Suppression就需要执行N
次。
相关文章:
目标检测各常见评价指标详解
注:本文仅供学习,未经同意请勿转载 说明:该博客来源于xiaobai_Ry:2020年3月笔记 对应的PDF下载链接在:待上传 目录 常见的评价指标 准确率 (Accuracy) 混淆矩阵 (Confusion Matrixÿ…...

深入讲解Kubernetes架构-控制器
在机器人技术和自动化领域,控制回路(Control Loop)是一个非终止回路,用于调节系统状态。这是一个控制环的例子:房间里的温度自动调节器。当你设置了温度,告诉了温度自动调节器你的期望状态(Desi…...

Urho3D本地化 国际化
本地化子系统提供了创建多语言应用程序的简单方法。 初始化 在使用子系统之前,需要加载本地化字符串集合。通常的做法是在应用程序启动时执行此操作。可以加载多个集合文件,每个集合文件只能定义一种或多种语言。例如: Localization* l10n…...
千锋教育嵌入式物联网教程之系统编程篇学习-04
目录 alarm函数 raise函数 abort函数 pause函数 转折点 signal函数 可重入函数 信号集 sigemptyset() sigfillset sigismember() sigaddset() sigdelset() 代码讲解 信号阻塞集 sigprocmask() alarm函数 相当于一个闹钟,默认动作是终止调用alarm函数的进…...

【运维】什么是 DevOps?
文章目录什么是 DevOps?如何实现 DevOpsDevOps工作原理: DevOps生命周期DevOps 文化DevOps 工具:构建 DevOps 工具链DevOps 和云原生开发什么是 DevSecOps?DevOps 和站点可靠性工程 (SRE)什么是 DevOps? DevOps 通过结…...

【C++入门】引用、内联函数、auto关键字、基于范围的for循环(C++11)、指针空值nullptr(C++11)
文章目录引用引用概念引用特性引用使用场景常引用内联函数宏的优缺点?C有哪些技术替代宏?auto关键字auto不能推导的场景基于范围的for循环(C11)指针空值nullptr(C11)引用 引用概念 引用不是新定义一个变量,而是给已存在变量取了一个别名&…...
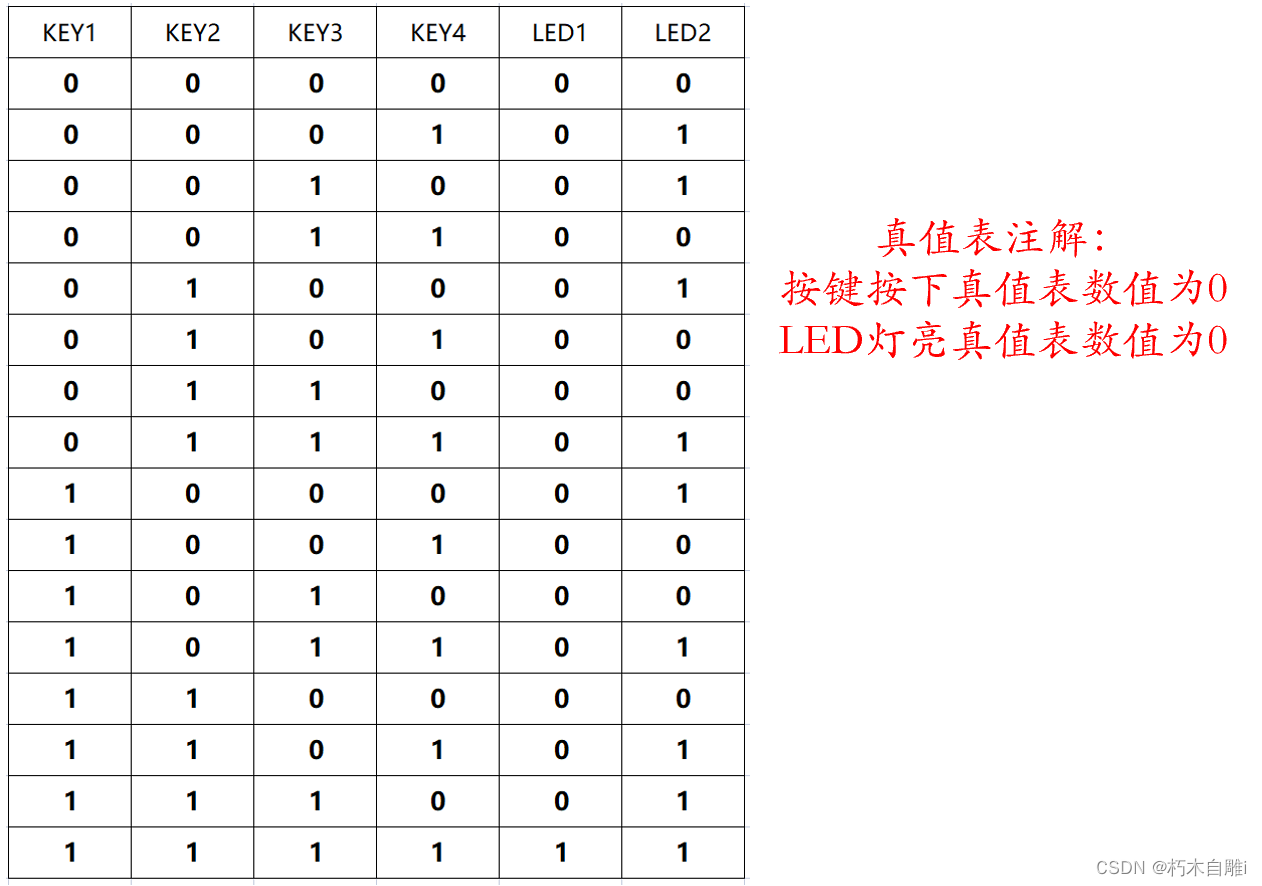
《FPGA学习》->多个按键控制LED灯
🍎与其担心未来,不如现在好好努力。在这条路上,只有奋斗才能给你安全感。你若努力,全世界都会为你让路。本次项目任务,利用开发板上的4个按键KEY1,KEY2,KEY3,KEY4和2个LED灯LED1&…...
-项目与程序结构(2))
vb.net计算之.net core基础(4)-项目与程序结构(2)
目录 Namespace 语句Visual Basic 中的命名空间完全限定名命名空间可以定义什么全局关键字命名规范条件编译拆分和合并语句拆分成多行在同一行上放置多个语句为代码行添加标签注释串联成员访问运算符点运算符 `.`感叹号 `!`运算符Me 关键字MyMyBaseMyClassNamespace 语句 <…...
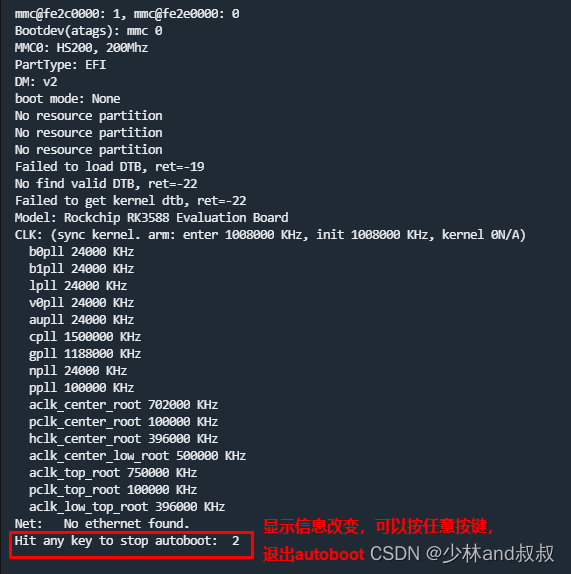
基于RK3588的嵌入式linux系统开发(五)——uboot优化修改(按任意按键停止autoboot)
我们通常情况下,芯片进入uboot后,会根据设置的bootdelay时间进行倒数计数。这时候在终端按任意键,即可退出autoboot,进入uboot的命令行模式。 官方提供的uboot源码中,为了防止调试串口干扰导致不能进入系统,…...

Lumerical---在FDTD和MODE工程中的PML边界条件
Lumerical---在FDTD和MODE工程中的PML边界条件 引言PML边界条件实现原理PML 类型PML 配置文件PML 配置文件选项Standard(标准)Stabilized(稳定性)Steep AngleCustom(陡角)对于不同的边界使用不同的配置FDE,varFDTD和FDTD SolverPML 参数阅读这篇前,推荐阅读边界条件综述…...

论文投稿指南——中文核心期刊推荐(社会学)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...

KVM-4、KVM 高级功能详解
1. 半虚拟化驱动 1.1 virtio 概述 KVM 是必须使用硬件虚拟化辅助技术(如 Intel VT-x 、AMD-V)的 Hypervisor,在CPU 运行效率方面有硬件支持,其效率是比较高的;在有 Intel EPT 特性支持的平台上,内存虚拟化的效率也较高。 QEMU/KVM 提供了全虚拟化环境,可以让客户机不经…...
【Linux】进程状态
文章目录1. 阻塞1. 举例2. 为什么要阻塞?3.操作系统层面上如何理解进程等待某种资源就绪呢?资源进程4. 总结2.挂起3.Linux进程状态1. R状态进程只要是R状态,就一定是在CPU运行吗?证明当前进程运行状态生成程序查看进程2. S休眠状态…...
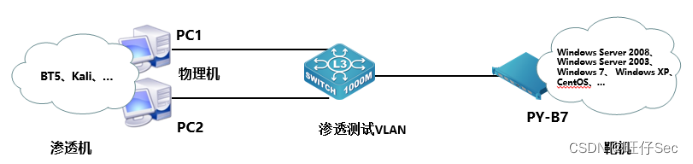
2023河南省第二届职业技能大赛郑州市选拔赛“网络安全”项目比赛样题任务书
2023河南省第二届职业技能大赛郑州市选拔赛“网络安全” 项目比赛样题任务书 一、竞赛时间 共计360分钟。 竞赛任务书内容 2023河南省第二届职业技能大赛郑州市选拔赛“网络安全” 项目比赛样题任务书 A模块基础设施设置/安全加固(200分) A-1&…...

pygame8 扫雷游戏
一、游戏规则: 1、点击方格,如果是地雷,游戏失败,找到所有地雷游戏胜利 2、如果方块上出现数字,则表示在其周围的八个方块中共有多少颗地雷 二、游戏主逻辑: 主要逻辑即调用run_game, 然后循环检测事件…...
c/c++开发,无可避免的模板编程实践(篇四)
一、容器与模板 前文就说到,标准库基于模板编程,定义了许多容器类以及一系列泛型算法,使程序员可以更简洁、抽象和有效地编写程序。C标准库中有大量的标准容器,这些容器通常包含一组数据或对象的集合,几乎可以和任何类…...
c++11 标准模板(STL)(std::unordered_set)(二)
定义于头文件 <unordered_set> template< class Key, class Hash std::hash<Key>, class KeyEqual std::equal_to<Key>, class Allocator std::allocator<Key> > class unordered_set;(1)(C11 起)namespace pmr { templ…...

GEE学习笔记 七十二:【GEE之Python版教程六】命令行简介
这篇开始就要讲解GEE相关的内容,首先聊一下命令行的内容,这个在官方文档中有详细的介绍,这里我简单说一下常用的几个命令,剩余的大家在使用过程中如果又需要可以随时查看相关官方文档的介绍。官方文档地址:https://dev…...
DDD单根 聚合根 实体 值对象
前言2004年Eric Evans 发表Domain-Driven Design –Tackling Complexity in the Heart of Software (领域驱动设计),简称Evans DDD。快二十年的时间,领域驱动设计在不断地发展,后微服务时代强调的东西,在国…...
SpringMvc介绍。
目录 1、SpringMvc概述 1、基本介绍 2、工作流程 3、bean加载控制 二、请求 1、请求映射路径 2、请求方式 3、请求参数 4、请求参数(传递json数据) 5、日期类型参数传递 三、响应 四、REST风格 1、REST简介 2、RESTful入门案例 3、RESTfu…...

遇到戴氏庄辉兰老师,是孩子英语学习的幸运
作为家长,一直为孩子英语焦虑,直到遇见戴氏庄辉兰老师,才真正放下心来。庄老师教学水平高、责任心强、有爱心、懂教育,不仅教知识,更培养兴趣和习惯。她课堂生动有趣,把枯燥知识点变得简单易懂,…...

终极指南:如何一键激活Cursor Pro完整功能,免费使用AI编程助手
终极指南:如何一键激活Cursor Pro完整功能,免费使用AI编程助手 【免费下载链接】cursor-free-vip [Support 0.45](Multi Language 多语言)自动注册 Cursor Ai ,自动重置机器ID , 免费升级使用Pro 功能: You…...

财联支付申请开通的门槛门槛高不高?
在数字支付蓬勃发展的当下,支付方式的便捷性和安全性成为了商户和消费者关注的焦点。财联支付作为数字支付领域的佼佼者,以其创新的技术和优质的服务吸引了众多商户的目光。然而,很多人对于财联支付申请开通的门槛存在疑问,究竟它…...

容器化自动化数据抓取平台OpenClaw-Compose部署与实战指南
1. 项目概述:一个容器化的开源自动化抓取与处理平台最近在折腾一个自动化数据抓取和处理的项目,发现了一个挺有意思的GitHub仓库:alexleach/openclaw-compose。乍一看标题,你可能会觉得这又是一个普通的Docker Compose编排文件集合…...
:Voice Cloning商用授权条款升级对SaaS产品的3重合规冲击)
ElevenLabs 2024定价突变预警(附迁移成本计算器):Voice Cloning商用授权条款升级对SaaS产品的3重合规冲击
更多请点击: https://intelliparadigm.com 第一章:ElevenLabs定价策略分析 核心订阅层级与功能边界 ElevenLabs 当前采用三层订阅模型(Starter、Creator、Professional),各层级在语音生成时长、并发请求、自定义声音…...
)
从PCB走线到连接器:手把手教你用ADS仿真优化S参数(避坑SI/PI设计)
从PCB走线到连接器:用ADS仿真优化S参数的实战指南 在高速数字电路和射频设计中,S参数就像设计师的"体检报告",直观反映信号传输路径的健康状况。想象一下,当你设计的PCIe Gen4接口在实验室测试时出现信号完整性问题&am…...

构建企业级数据集成平台:解锁非标准数据源的.NET适配器框架实践
1. 项目概述与核心价值最近在和一些做企业级应用集成的朋友聊天,大家普遍提到一个痛点:从大型商业软件(比如SAP、Oracle EBS)或者一些老旧的、文档不全的遗留系统中抽取数据时,经常会遇到各种“非标准”的数据格式。这…...

Android Studio中文界面完整解决方案:从语言障碍到高效开发
Android Studio中文界面完整解决方案:从语言障碍到高效开发 【免费下载链接】AndroidStudioChineseLanguagePack AndroidStudio中文插件(官方修改版本) 项目地址: https://gitcode.com/gh_mirrors/an/AndroidStudioChineseLanguagePack AndroidSt…...
)
别再乱接线了!ESP32-DevKitC V4开发板引脚功能详解与避坑指南(附引脚图)
ESP32-DevKitC V4开发板引脚安全操作手册:从入门到精通的接线法则 当你第一次拿到ESP32-DevKitC V4开发板时,那些密密麻麻的引脚可能会让你感到无从下手。作为一名曾经因为误接引脚而烧毁过三块开发板的"过来人",我深知正确的引脚使…...

从YUYV到MJPEG:一次搞懂Linux V4L2摄像头像素格式的坑,附帧数据保存实战
从YUYV到MJPEG:深入解析Linux V4L2摄像头像素格式与实战避坑指南 当你在Linux系统下通过V4L2框架采集摄像头数据时,是否遇到过保存的图片无法打开、颜色显示异常或者帧数据莫名其妙损坏的情况?这些问题的根源往往在于对像素格式的理解不足。本…...