opencv基础55-获取轮廓的特征值及示例
轮廓自身的一些属性特征及轮廓所包围对象的特征对于描述图像具有重要意义。本节介绍几个轮廓自身的属性特征及轮廓所包围对象的特征。
宽高比
可以使用宽高比(AspectRation)来描述轮廓,例如矩形轮廓的宽高比为:
宽高比 = 宽度(Width)/高度(Height)
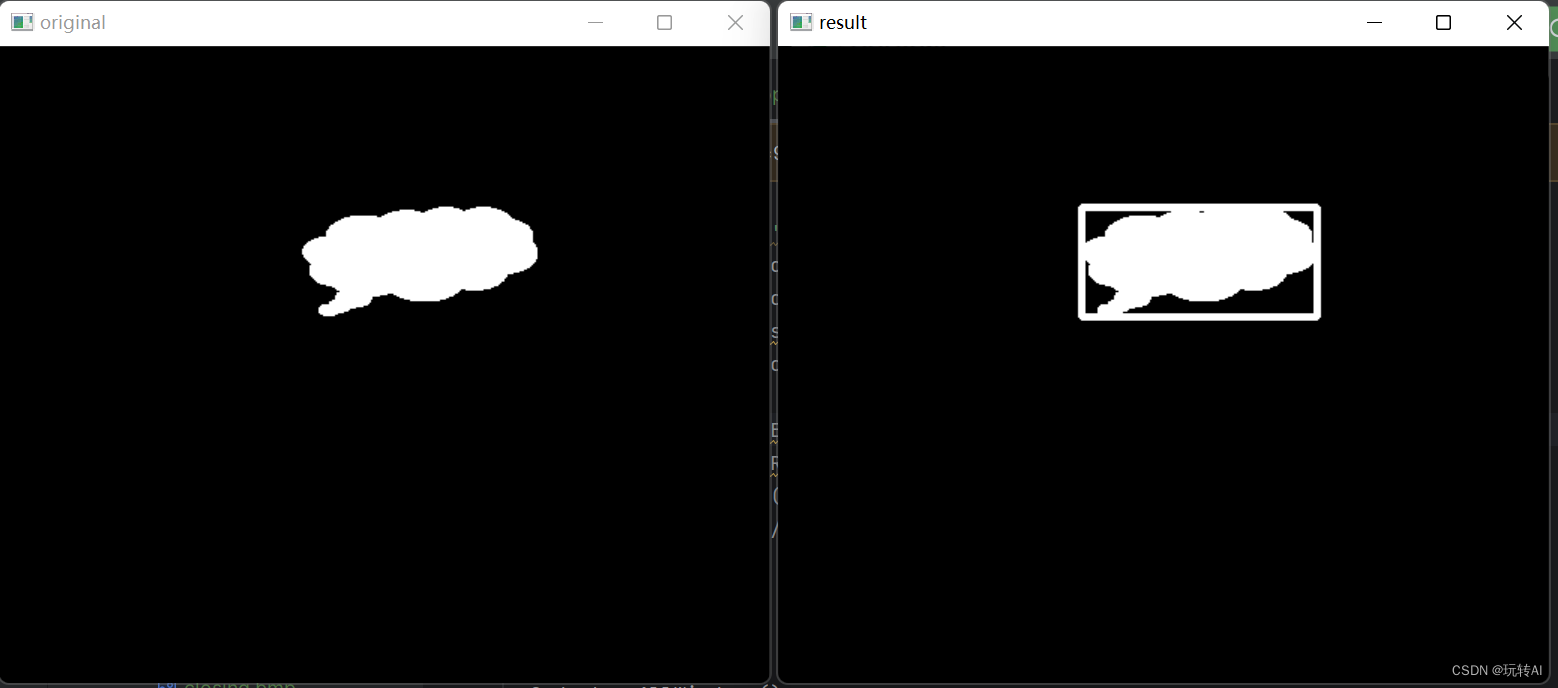
示例:编写程序计算矩形轮廓的宽高比。
import cv2
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
x,y,w,h = cv2.boundingRect(contours[0])
cv2.rectangle(o,(x,y),(x+w,y+h),(255,255,255),3)
aspectRatio = float(w)/hprint(aspectRatio)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
运行结果:
同时,程序还会显示如下的运行结果:
2.1506849315068495
可以看出,轮廓的宽高比约为 2。
Extent(用轮廓面积与矩形边界(矩形包围框、矩形轮廓)面积之比 )
可以使用轮廓面积与矩形边界(矩形包围框、矩形轮廓)面积之比 Extend 来描述图像及
其轮廓特征。计算方法为:

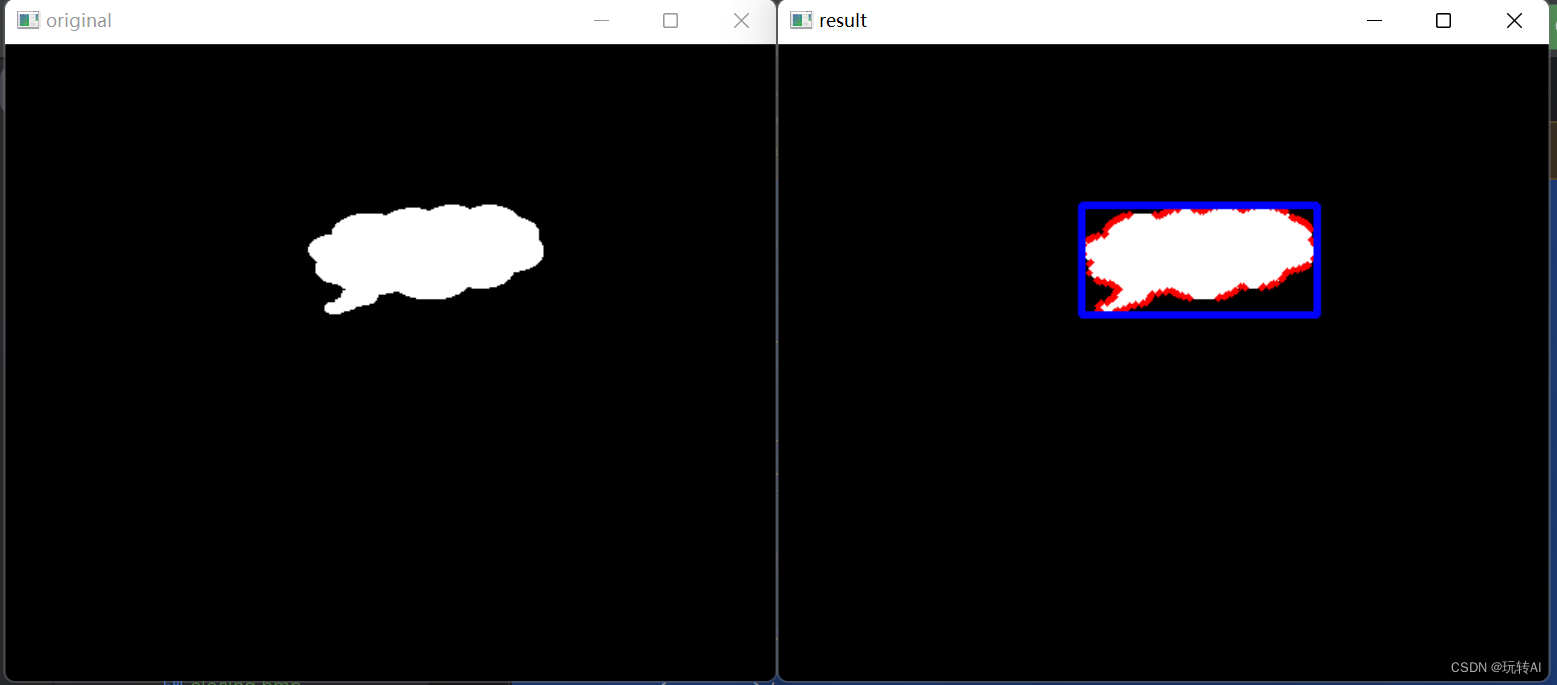
示例:计算图像的轮廓面积与其矩形边界面积之比。
import cv2
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
x,y,w,h = cv2.boundingRect(contours[0])
cv2.drawContours(o,contours[0],-1,(0,0,255),3)
cv2.rectangle(o,(x,y),(x+w,y+h),(255,0,0),3)
#----------------计算轮廓的面积与边界矩形的面积-------------------------
rectArea=w*h
cntArea=cv2.contourArea(contours[0])extend=float(cntArea)/rectArea
print(extend)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
同时,程序还会显示如下的运行结果:
0.6717127650292296
可以看出,本例中图像的轮廓面积与矩形边界面积的比值大约为 0.7。
Solidity(轮廓面积与凸包面积之比)
可以使用轮廓面积与凸包面积之比 Solidity 来衡量图像、轮廓及凸包的特征。其计算方法为:

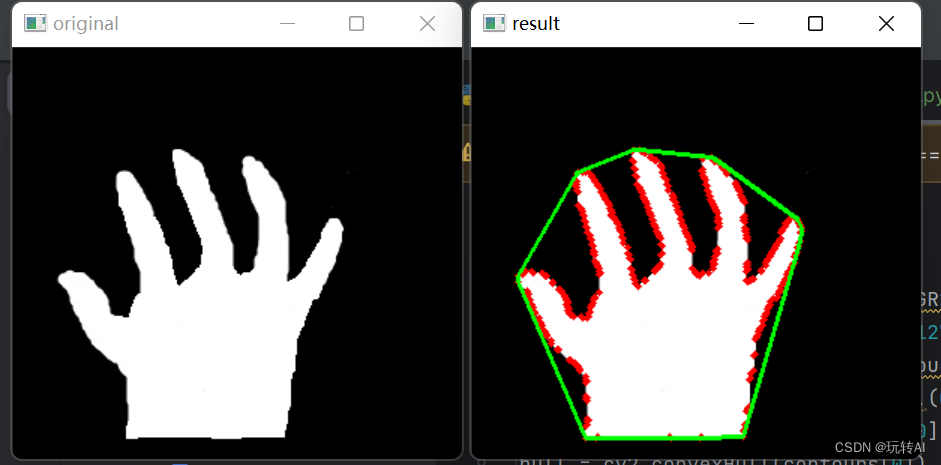
示例:编写程序计算图像轮廓面积与凸包面积之比。
import cv2
o = cv2.imread('hand.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy =cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
cv2.drawContours(o,contours[0],-1,(0,0,255),3)
cntArea=cv2.contourArea(contours[0])
hull = cv2.convexHull(contours[0])
hullArea = cv2.contourArea(hull)
cv2.polylines(o, [hull], True, (0, 255, 0), 2)
solidity=float(cntArea)/hullArea
print(solidity)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
同时,程序还会显示如下的运行结果:
0.6752344564084751
可以看出,本例中图像的轮廓面积与凸包面积的比值约为 0.7。
就是绿色的跟红色的面积之比
等效直径(Equivalent Diameter)
可以用等效直径来衡量轮廓的特征值,该值是与轮廓面积相等的圆形的直径。其计算公式为:

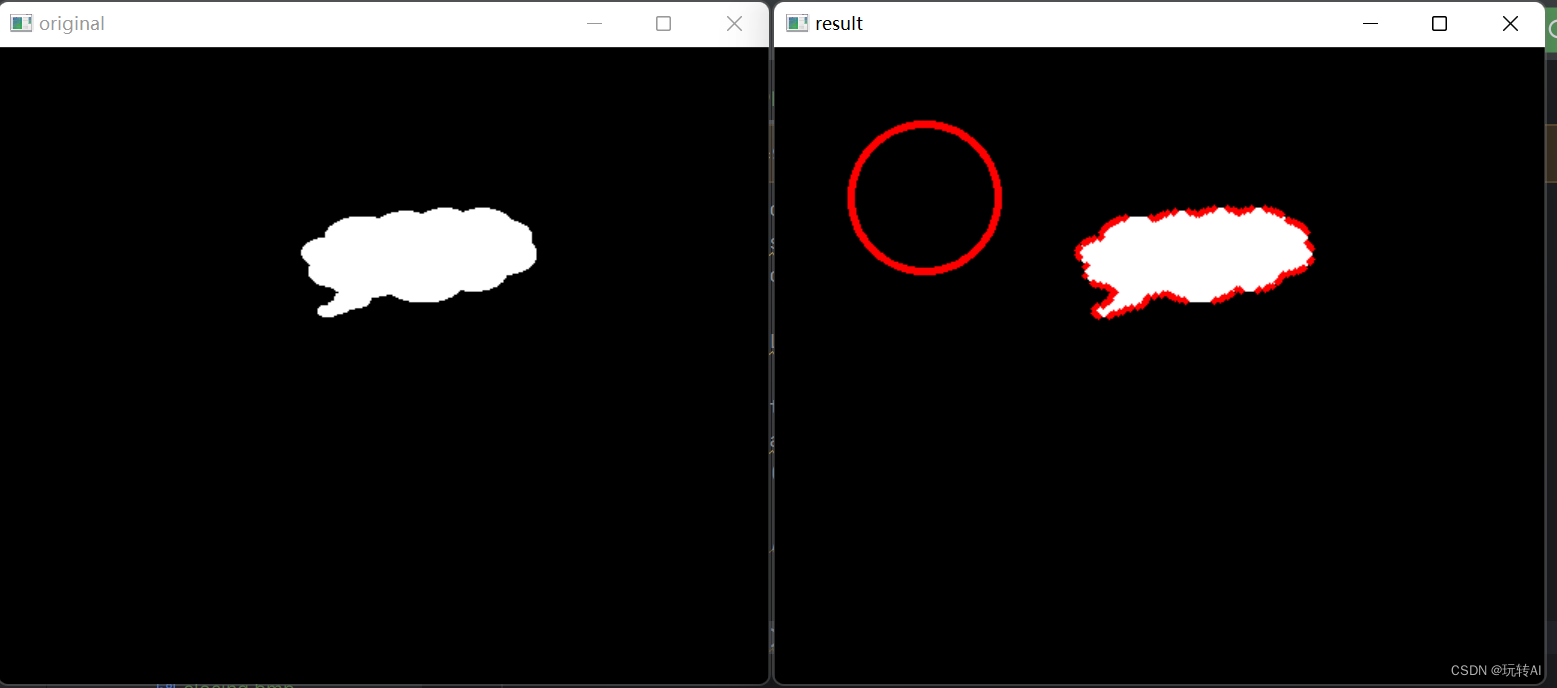
示例:计算与轮廓面积相等的圆形的直径,并绘制与该轮廓等面积的圆。
import cv2
import numpy as np
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)cv2.drawContours(o,contours[0],-1,(0,0,255),3)
cntArea=cv2.contourArea(contours[0])
equiDiameter = np.sqrt(4*cntArea/np.pi)
print(equiDiameter)
cv2.circle(o,(100,100),int(equiDiameter/2),(0,0,255),3) #展示等直径大小的圆
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
同时,程序还会显示如下的运行结果:
99.00522529212108
可以看出,与本例中与轮廓面积相等的圆形的直径约为 99。
方向
在 OpenCV 中,函数 cv2.fitEllipse()可以用来构造最优拟合椭圆,还可以在返回值内分别返回椭圆的中心点、轴长、旋转角度等信息。使用这种形式,能够更直观地获取椭圆的方向等信息。
函数 cv2.fitEllipse()返回各个属性值的语法格式为:
(x,y),(MA,ma),angle = cv2.fitEllipse(cnt)
式中几个返回值的意义如下:
- (x,y):椭圆的中心点。
- (MA,ma):椭圆水平方向轴和垂直方向轴的长度。
- angle:椭圆的旋转角度。
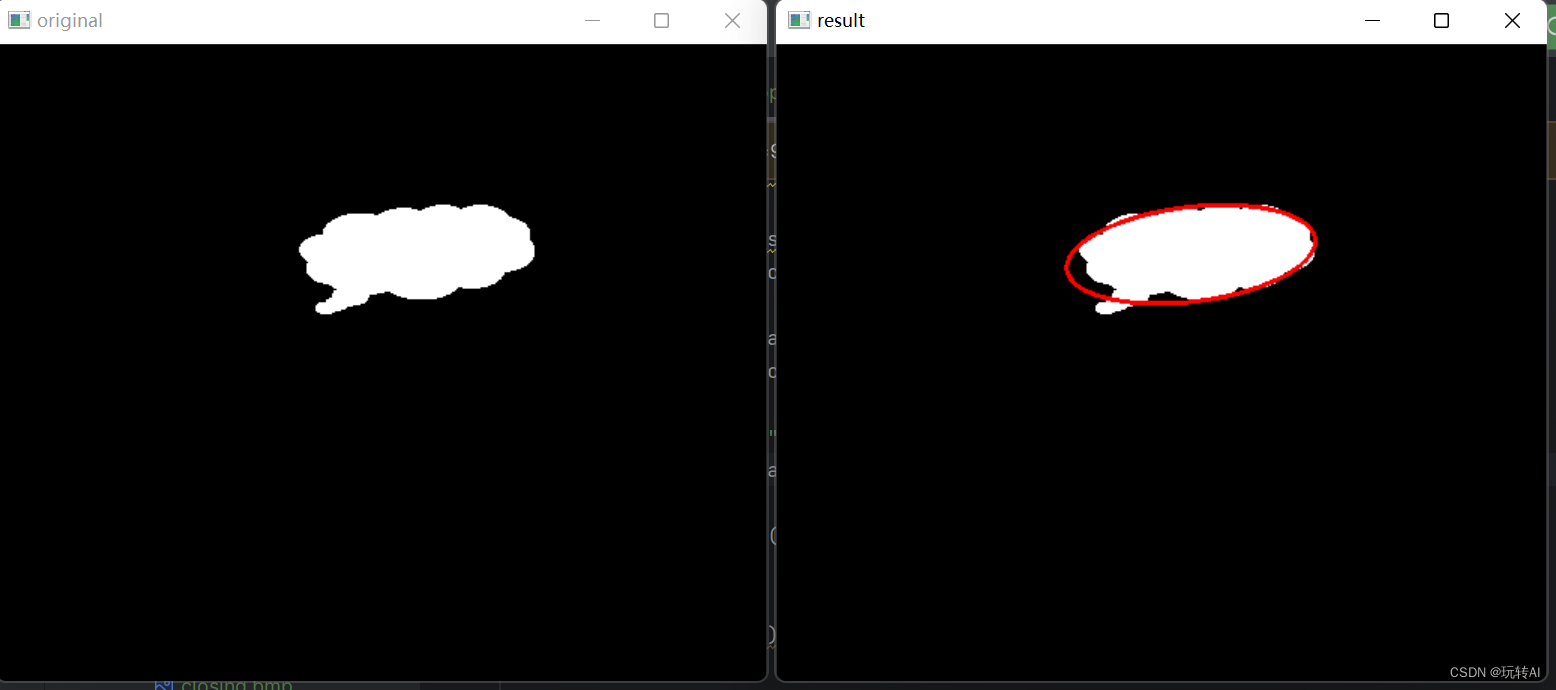
示例:观察函数 cv2.fitEllipse()的不同返回值
import cv2
o = cv2.imread('cc.bmp')cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)ellipse = cv2.fitEllipse(contours[0])
retval=cv2.fitEllipse(contours[0])
print("单个返回值形式:")
print("retval=\n",retval)
(x,y),(MA,ma),angle = cv2.fitEllipse(contours[0])
print("三个返回值形式:")
print("(x,y)=(",x,y,")")
print("(MA,ma)=(",MA,ma,")")
print("angle=",angle)
cv2.ellipse(o,ellipse,(0,0,255),2)
cv2.imshow("result",o)
cv2.waitKey()
cv2.destroyAllWindows()
同时,程序还会显示如下的运行结果:
单个返回值形式:
retval=
((276.2112731933594, 139.6067352294922), (63.01350021362305,
166.72308349609375), 82.60102844238281)
三个返回值形式:
(x,y)=( 276.2112731933594 139.6067352294922 )
(MA,ma)=( 63.01350021362305 166.72308349609375 )
angle= 82.60102844238281
从以上运行结果可以看出,函数 cv2.fitEllipse()以不同形式返回的值是相同的。
掩模和像素点
有时,我们希望获取某对象的掩模图像及其对应的点。51 节介绍了将函数cv2.drawContours()的轮廓宽度参数 thickness 设置为“-1”,即可获取特定对象的实心轮廓,即特定对象的掩模。
另外,我们可能还希望获取轮廓像素点的具体位置信息。本节介绍如何获取轮廓(实心、空心)的像素点位置信息。
一般情况下,轮廓是图像内非零的像素点,可以通过两种方式获取轮廓像素点的位置信息。
一种是使用 Numpy 函数,另外一种是使用 OpenCV 函数。
1.使用Numpy函数获取轮廓像素点
numpy.nonzero()函数能够找出数组内非零元素的位置,但是其返回值是将行、列分别显示
的。
例如,对于如下数组 a 应用函数 numpy.nonzero():
a=
[[0 0 0 1 0]
[0 0 1 0 1]
[0 0 1 1 1]
[1 0 0 0 0]
[1 0 0 0 1]]
返回的数组 a 内非零元素的位置信息为:
(array([0, 1, 1, 2, 2, 2, 3, 4, 4], dtype=int64), array([3, 2, 4, 2, 3, 4, 0,
0, 4], dtype=int64))
使用 numpy.transpose()函数处理上述返回值,则得到这些点的(x, y)形式的坐标:
[[0 3] [1 2] [1 4] [2 2] [2 3] [2 4] [3 0] [4 0] [4 4]]
示例:使用 Numpy 函数获取一个数组内的非零值元素的位置信息。
代码如下:
import numpy as np
#------------生成一个元素都是零值的数组 a-------------------
a=np.zeros((5,5),dtype=np.uint8)
#-------随机将其中 10 个位置上的数值设置为 1------------
#---times 控制次数
#---i,j 是随机生成的行、列位置#---a[i,j]=1,将随机挑选出来的位置上的值设置为 1
for times in range(10):i=np.random.randint(0,5)j=np.random.randint(0,5)a[i,j]=1
#-------打印数组 a,观察数组 a 内值的情况-----------
print("a=\n",a)
#------查找数组 a 内非零值的位置信息------------
loc=np.transpose(np.nonzero(a))
#-----输出数组 a 内非零值的位置信息------------
print("a 内非零值的位置:\n",loc)
运行上述程序,会显示如下的运行结果:
a=
[[1 1 0 0 0]
[1 1 0 1 1]
[1 0 0 0 0]
[0 0 0 1 0]
[1 1 0 0 0]]
a 内非零值的位置:
[[0 0]
[0 1]
[1 0]
[1 1]
[1 3]
[1 4]
[2 0]
[3 3]
[4 0]
[4 1]]
示例:使用 Numpy 函数获取一个图像内的轮廓点位置。
import cv2
import numpy as np
#-----------------读取原始图像----------------------
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
#-----------------获取轮廓------------------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt=contours[0]#-----------------绘制空心轮廓------------------------
mask1 = np.zeros(gray.shape,np.uint8)
cv2.drawContours(mask1,[cnt],0,255,2)
pixelpoints1 = np.transpose(np.nonzero(mask1))
print("pixelpoints1.shape=",pixelpoints1.shape)
print("pixelpoints1=\n",pixelpoints1)
cv2.imshow("mask1",mask1)
#-----------------绘制实心轮廓---------------------
mask2 = np.zeros(gray.shape,np.uint8)
cv2.drawContours(mask2,[cnt],0,255,-1)
pixelpoints2 = np.transpose(np.nonzero(mask2))
print("pixelpoints2.shape=",pixelpoints2.shape)
print("pixelpoints2=\n",pixelpoints2)
cv2.imshow("mask2",mask2)
#-----------------释放窗口------------------------
cv2.waitKey()
cv2.destroyAllWindows()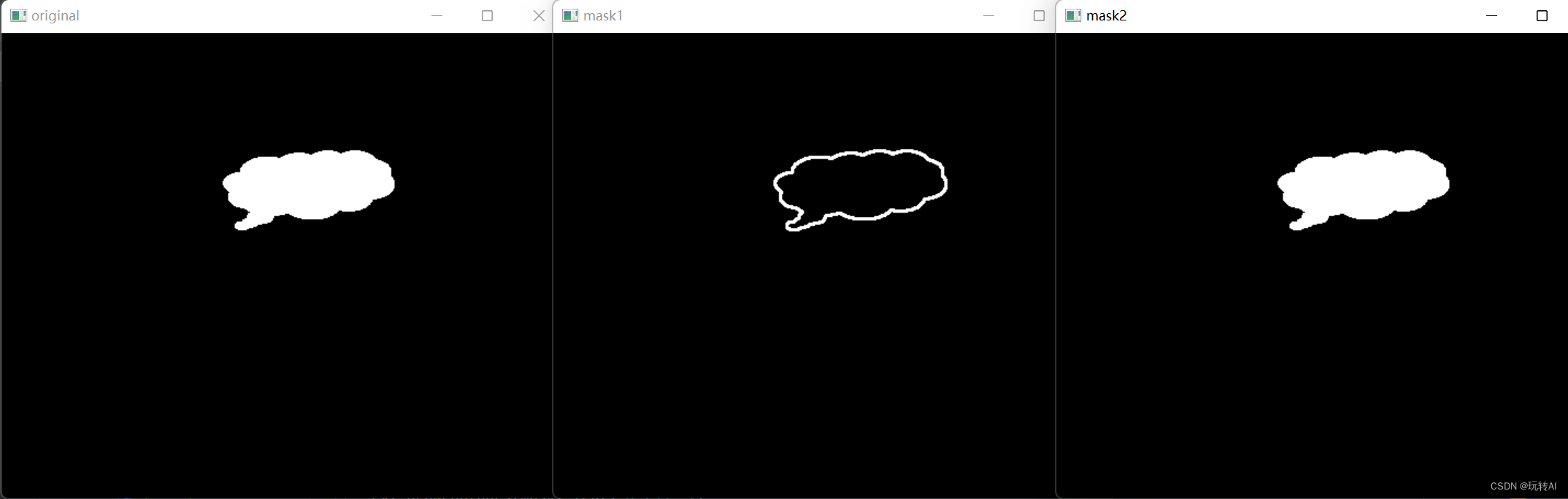
- 左图是图像 o。
- 中间的是空心轮廓图像 mask1。
- 右图是实心轮廓图像 mask2。
同时,程序还会显示如下的运行结果:
pixelpoints1.shape= (1400, 2)
pixelpoints1=[[106 292][106 293][106 294]...[180 222][180 223][180 224]]
pixelpoints2.shape= (7892, 2)
pixelpoints2=[[107 293][107 294][107 295]...[179 221][179 222][179 223]]
使用OpenCV函数获取轮廓点
OpenCV 提供了函数 cv2.findNonZero()用于查找非零元素的索引。该函数的语法格式为:
idx = cv2.findNonZero( src )
式中:
- idx 为返回值,表示非零元素的索引位置。需要注意的是,在返回的索引中,每个元素对应的是(列号,行号)的格式。
- src 为参数,表示要查找非零元素的图像。
示例: 使用 OpenCV 函数 cv2.findNonZero()获取一个数组内的非零值。
代码如下:
import cv2
import numpy as np
#------------生成一个元素都是零值的数组 a-------------------
a=np.zeros((5,5),dtype=np.uint8)
#-------随机将其中 10 个位置上的值设置为 1------------
#---times 控制次数
#---i,j 是随机生成的行、列位置
#---a[i,j]=1,将随机挑选出来的位置上的值设置为 1
for times in range(10):i=np.random.randint(0,5)j=np.random.randint(0,5)a[i,j]=1
#-------打印数组 a,观察数组 a 内值的情况-----------
print("a=\n",a)
#------查找数组 a 内非零值的位置信息------------
loc = cv2.findNonZero(a)
#-----输出数组 a 内非零值的位置信息------------
print("a 内非零值的位置:\n",loc)
运行上述程序,会显示如下的运行结果:
a=[[1 1 0 0 0][0 0 0 0 1][0 0 1 1 0][0 0 0 0 1][0 0 0 0 0]]
a 内非零值的位置:[[[0 0]][[1 0]][[4 1]][[2 2]][[3 2]][[4 3]]]
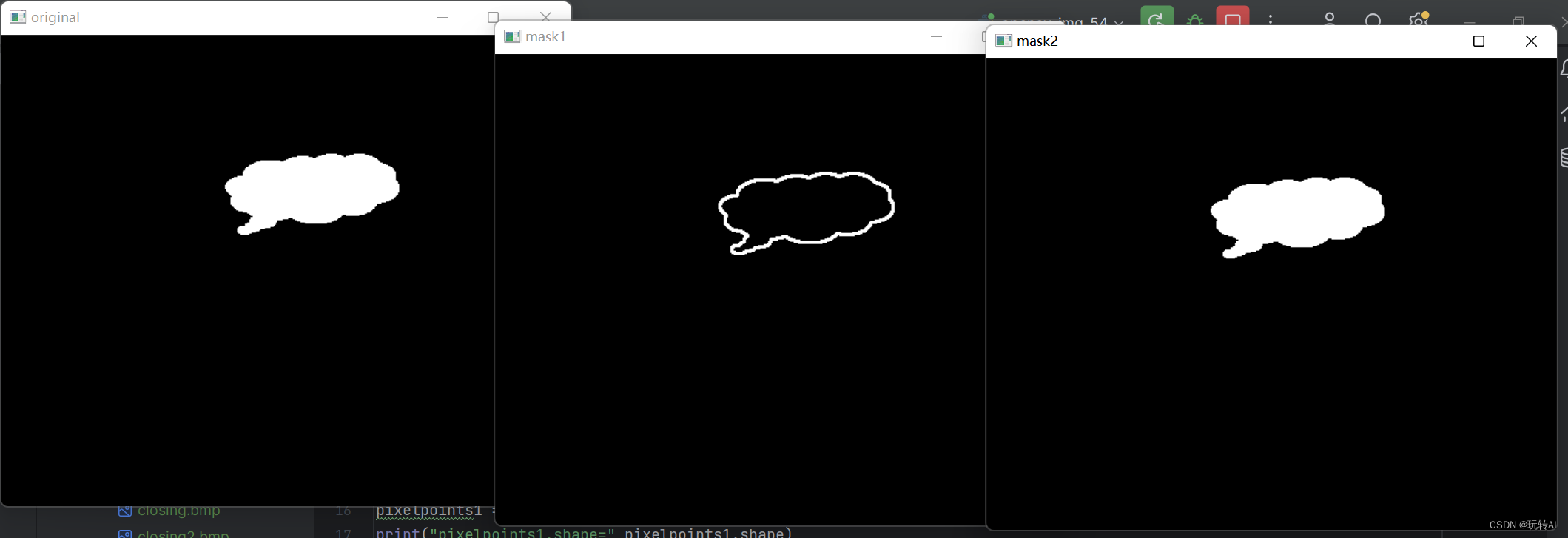
示例:使用 OpenCV 函数 cv2.findNonZero()获取一个图像内的轮廓点的位置。
import cv2
import numpy as np
#-----------------读取原始图像----------------------
o = cv2.imread('cc.bmp')
cv2.imshow("original",o)
#-----------------获取轮廓------------------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt=contours[0]
#-----------------绘制空心轮廓------------------------
mask1 = np.zeros(gray.shape,np.uint8)
cv2.drawContours(mask1,[cnt],0,255,2)
pixelpoints1 = cv2.findNonZero(mask1)
print("pixelpoints1.shape=",pixelpoints1.shape)
print("pixelpoints1=\n",pixelpoints1)
cv2.imshow("mask1",mask1)
#-----------------绘制实心轮廓---------------------
mask2 = np.zeros(gray.shape,np.uint8)
cv2.drawContours(mask2,[cnt],0,255,-1)
pixelpoints2 = cv2.findNonZero(mask2)
print("pixelpoints2.shape=",pixelpoints2.shape)
print("pixelpoints2=\n",pixelpoints2)
cv2.imshow("mask2",mask2)
#-----------------释放窗口------------------------
cv2.waitKey()
cv2.destroyAllWindows()
- 左图是原图像 o。
- 中间的是空心轮廓图像 mask1。
- 右图是实心轮廓图像 mask2。
同时,程序还会显示如下的运行结果:
pixelpoints1.shape= (1400, 1, 2)
pixelpoints1=
[[[292 106]]
[[293 106]]
[[294 106]]
...
[[222 180]]
[[223 180]]
[[224 180]]]
pixelpoints2.shape= (7892, 1, 2)
pixelpoints2=
[[[293 107]]
[[294 107]]
[[295 107]]
...
[[221 179]]
[[222 179]]
[[223 179]]]
最大值和最小值及它们的位置
OpenCV 提供了函数 cv2.minMaxLoc(),用于在指定的对象内查找最大值、最小值及其位
置。该函数的语法格式是:
min_val, max_val, min_loc, max_loc = cv2.minMaxLoc(imgray,mask = mask)
式中的返回值为:
-
min_val:最小值。
-
max_val:最大值。
-
min_loc:最小值的位置。
-
max_loc:最大值的位置。
式中的参数如下: -
imgray:单通道图像。
-
mask:掩模。通过使用掩模图像,可以得到掩模指定区域内的最值信息。
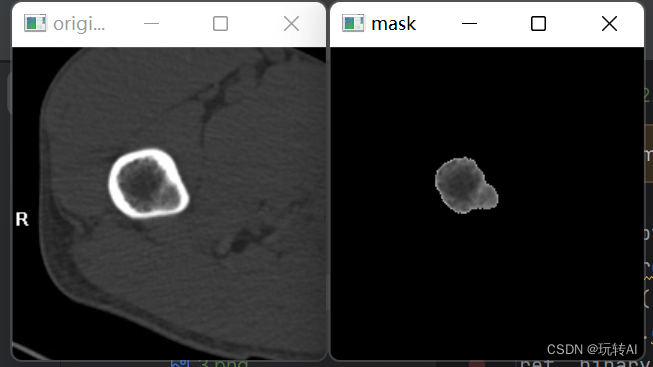
示例:使用函数 cv2.minMaxLoc()在图像内查找掩模指定区域内的最大值、最小值及其位置。
import cv2
import numpy as np
o = cv2.imread('ct.png')
cv2.imshow("original",o)
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt=contours[2] #coutours[0]、coutours[1]是左侧字母 R
#--------使用掩模获取感兴趣区域的最值-----------------
#需要注意函数 minMaxLoc 处理的对象为灰度图像,本例中处理的对象为灰度图像 gray
#如果希望获取彩色图像的最值,需要提取各个通道图像,为每个通道独立计算最值
mask = np.zeros(gray.shape,np.uint8)
mask=cv2.drawContours(mask,[cnt],-1,255,-1)
minVal, maxVal, minLoc, maxLoc = cv2.minMaxLoc(gray,mask = mask)
print("minVal=",minVal)
print("maxVal=",maxVal)
print("minLoc=",minLoc)
print("maxLoc=",maxLoc)
#--------使用掩模获取感兴趣区域并显示-----------------
masko = np.zeros(o.shape,np.uint8)
masko=cv2.drawContours(masko,[cnt],-1,(255,255,255),-1)
loc=cv2.bitwise_and(o,masko)
cv2.imshow("mask",loc)
#显示灰度结果
#loc=cv2.bitwise_and(gray,mask)
#cv2.imshow("mask",loc)
#--------释放窗口-----------------
cv2.waitKey()
cv2.destroyAllWindows()
示例原图

- 左图是图像 o。
- 右图是掩模图像 mask。
同时,程序还会显示如下的运行结果:
minVal= 42.0
maxVal= 200.0
minLoc= (87, 90)
maxLoc= (90, 110)
平均颜色及平均灰度
OpenCV 提供了函数 cv2.mean(),用于计算一个对象的平均颜色或平均灰度。该函数的语
法格式为:
mean_val = cv2.mean(im,mask = mask)
式中的返回值为 mean_val,表示返回的平均值。
式中的参数如下:
- im:原图像。
- mask:掩模。
示例:使用函数 cv2.mean()计算一个对象的平均灰度。
import cv2
import numpy as np
#--------读取并显示原始图像-----------------
o = cv2.imread('ct.png')
cv2.imshow("original",o)
#--------获取轮廓-----------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,
cv2.CHAIN_APPROX_SIMPLE)
cnt=contours[2] #coutours[0]、coutours[1]是左侧字母 R
#--------使用掩模获取感兴趣区域的均值-----------------
mask = np.zeros(gray.shape,np.uint8) #构造 mean 所使用的掩模(必须是单通道的)cv2.drawContours(mask,[cnt],0,(255,255,255),-1)
meanVal = cv2.mean(o,mask = mask) # mask 是一个区域,所以必须是单通道的
print("meanVal=\n",meanVal)
#--------使用掩模获取感兴趣区域并显示-----------------
masko = np.zeros(o.shape,np.uint8)
cv2.drawContours(masko,[cnt],-1,(255,255,255),-1)
loc=cv2.bitwise_and(o,masko)
cv2.imshow("mask",loc)
#--------释放窗口-----------------
cv2.waitKey()
cv2.destroyAllWindows()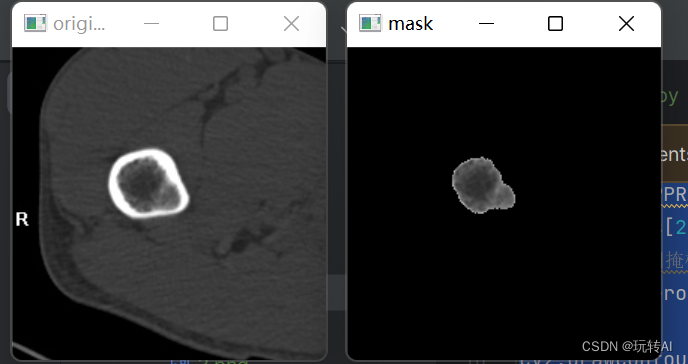
- 左图是图像 o。
- 右图是获取的感兴趣区域。
同时,程序还会显示如下的运行结果:
meanVal= (85.45594913714805, 85.45594913714805, 85.45594913714805, 0.0)
从上述结果可以看出,函数 cv2.mean()能够计算各个通道的均值。上述 4 个值分别是 RGB和 A 通道(alpha
通道)的均值。本例中,RGB 三个通道的值相同,所以计算出的均值也是一样的。
极点
有时,我们希望获取某个对象内的极值点,例如最左端、最右端、最上端、最下端的四个
点。OpenCV 提供了相应的函数来找出这些点,通常的语法格式是:
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost = tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])
示例: 计算一幅图像内的极值点。
import cv2
import numpy as np
o = cv2.imread('cs.bmp')
#--------获取并绘制轮廓-----------------
gray = cv2.cvtColor(o,cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray,127,255,cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary,cv2.RETR_LIST,cv2.CHAIN_APPROX_SIMPLE)
mask = np.zeros(gray.shape,np.uint8)
cnt=contours[0]
cv2.drawContours(mask,[cnt],0,255,-1)
#--------计算极值-----------------
leftmost = tuple(cnt[cnt[:,:,0].argmin()][0])
rightmost = tuple(cnt[cnt[:,:,0].argmax()][0])
topmost = tuple(cnt[cnt[:,:,1].argmin()][0])
bottommost = tuple(cnt[cnt[:,:,1].argmax()][0])
#--------打印极值-----------------
print("leftmost=",leftmost)
print("rightmost=",rightmost)
print("topmost=",topmost)
print("bottommost=",bottommost)
#--------绘制说明文字-----------------
font=cv2.FONT_HERSHEY_SIMPLEX
cv2.putText(o,'A',leftmost, font, 1,(0,0,255),2)
cv2.putText(o,'B',rightmost, font, 1,(0,0,255),2)
cv2.putText(o,'C',topmost, font, 1,(0,0,255),2)
cv2.putText(o,'D',bottommost, font, 1,(0,0,255),2)
#--------绘制图像-----------------
cv2.imshow("result",o)
#--------释放窗口-----------------
cv2.waitKey()
cv2.destroyAllWindows()
其中的A,B,C,D 就是该图像的极点

同时,程序还会显示如下的运行结果:
leftmost= (202, 135)
rightmost= (423, 120)
topmost= (369, 69)
bottommost= (216, 179)
相关文章:
opencv基础55-获取轮廓的特征值及示例
轮廓自身的一些属性特征及轮廓所包围对象的特征对于描述图像具有重要意义。本节介绍几个轮廓自身的属性特征及轮廓所包围对象的特征。 宽高比 可以使用宽高比(AspectRation)来描述轮廓,例如矩形轮廓的宽高比为: 宽高比 宽度&am…...
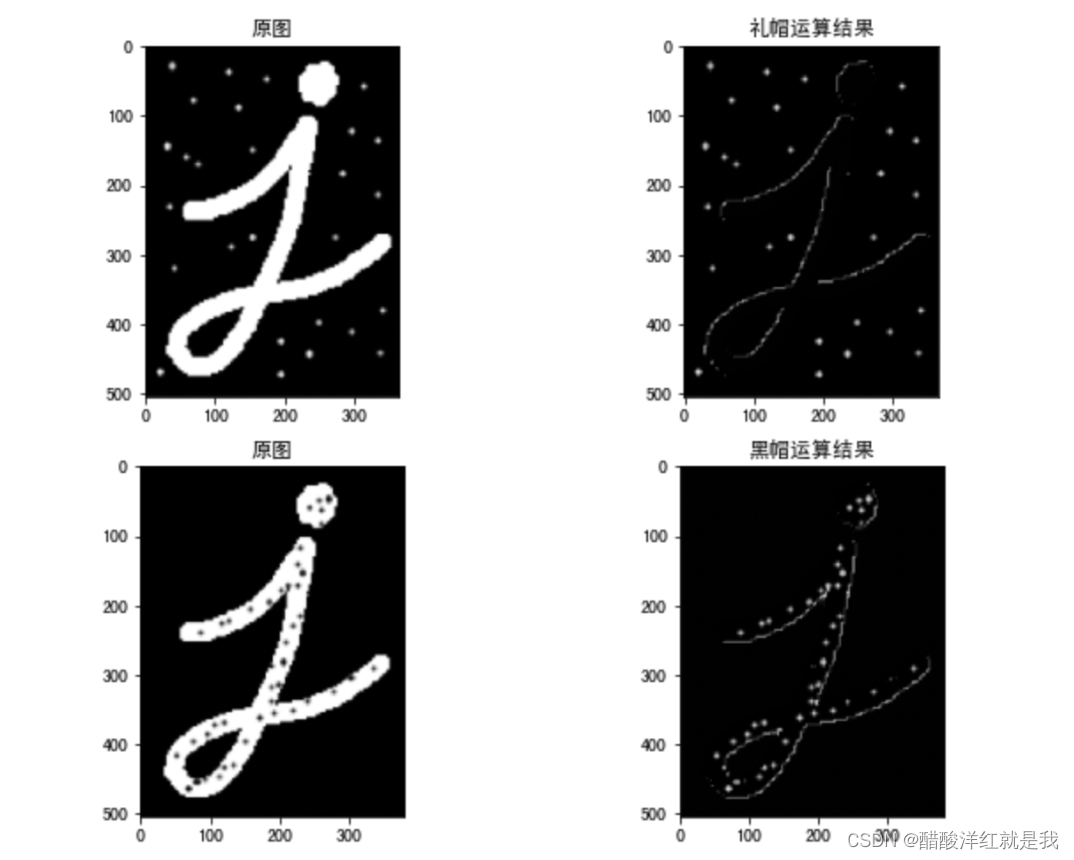
OpenCV图像处理——形态学操作
目录 连通性形态学操作腐蚀和膨胀开闭运算礼帽和黑帽 连通性 形态学操作 形态学转换是基于图像形状的一些简单操作。它通常在二进制图像上执行。腐蚀和膨胀时两个基本的形态学运算符。然后它的变体形式如开运算,闭运算,礼帽黑帽等 腐蚀和膨胀 cv.erode…...

修改VS Code终端的显示行数
文章目录 前言修改VS Code终端显示行数参考 前言 在我们使用VS Code运行代码的过程中,有时需要再终端中显示很多的运行过程信息或者结果。然而,VS Code的终端默认显示1000行的内容,随着显示内容的增多,之前的内容就丢失了。为了解…...
C++学习| MFC简单入门
前言:因为接手了CMFC的程序,所以需要对MFC编程方面有所了解。 C之MFC简单入门 MFC相关的概念MFCWIN32QT MFC项目基本操作MFC项目创建MFC项目文件解读界面和代码数据交互——加法器 MFC相关的概念 MFC MFC(Microsoft Foundation Classes微软…...

“一日之际在于晨”,欢迎莅临WAVE SUMMIT上午场:Arm 虚拟硬件早餐交流会
8月16日,盛夏的北京将迎来第九届WAVE SUMMIT深度学习开发者大会。在峰会主论坛正式开启前,让我们先用一份精美的元气早餐,和一场“Arm虚拟硬件交流会”,唤醒各位开发小伙伴的开发魂! 8月16日,WAVE SUMMIT大…...

leetcode454. 四数相加 II
题目:leetcode454. 四数相加 II 描述: 给你四个整数数组 nums1、nums2、nums3 和 nums4 ,数组长度都是 n ,请你计算有多少个元组 (i, j, k, l) 能满足: 0 < i, j, k, l < n nums1[i] nums2[j] nums3[k] num…...

PHP证券交易员学习网站mysql数据库web结构apache计算机软件工程网页wamp
一、源码特点 PHP证券交易员学习网站 是一套完善的web设计系统,对理解php编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。 下载地址https://download.csdn.net/download/qq_41221322/88205549 PHP证券交易员…...
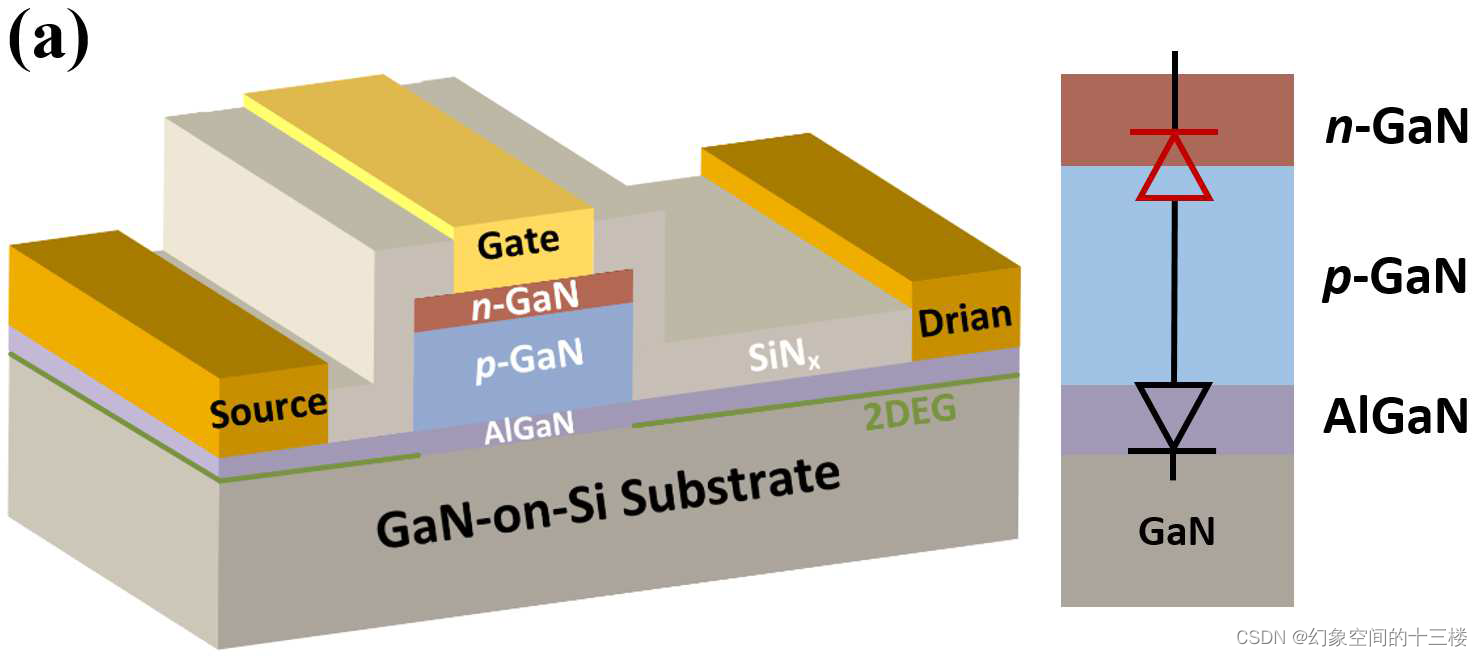
对p-n结/AlGaN/GaN HEMTs中n-GaN掺杂浓度对栅极可靠性的影响
目录 第35届功率半导体器件与集成电路国际研讨会论文集2023年5月28日至6月1日,中国香港南方科技大学电气电子工程系,深圳标题:Impacts of n-GaN Doping Concentration on Gate Reliability of p-n Junction/AlGaN/GaN HEMTs摘要信息解释研究了…...

Mac M2 Pro安装使用Cocoapods
Mac Pro M2安装使用Cocoapods 在新公司要做iOS开发,所以在新电脑上安装Cocoapods 在升级gem,sudo gem update --system,和安装cocoapods时都遇到如下的提示: ERROR: While executing gem ... (Errno::EPERM)Operation not per…...
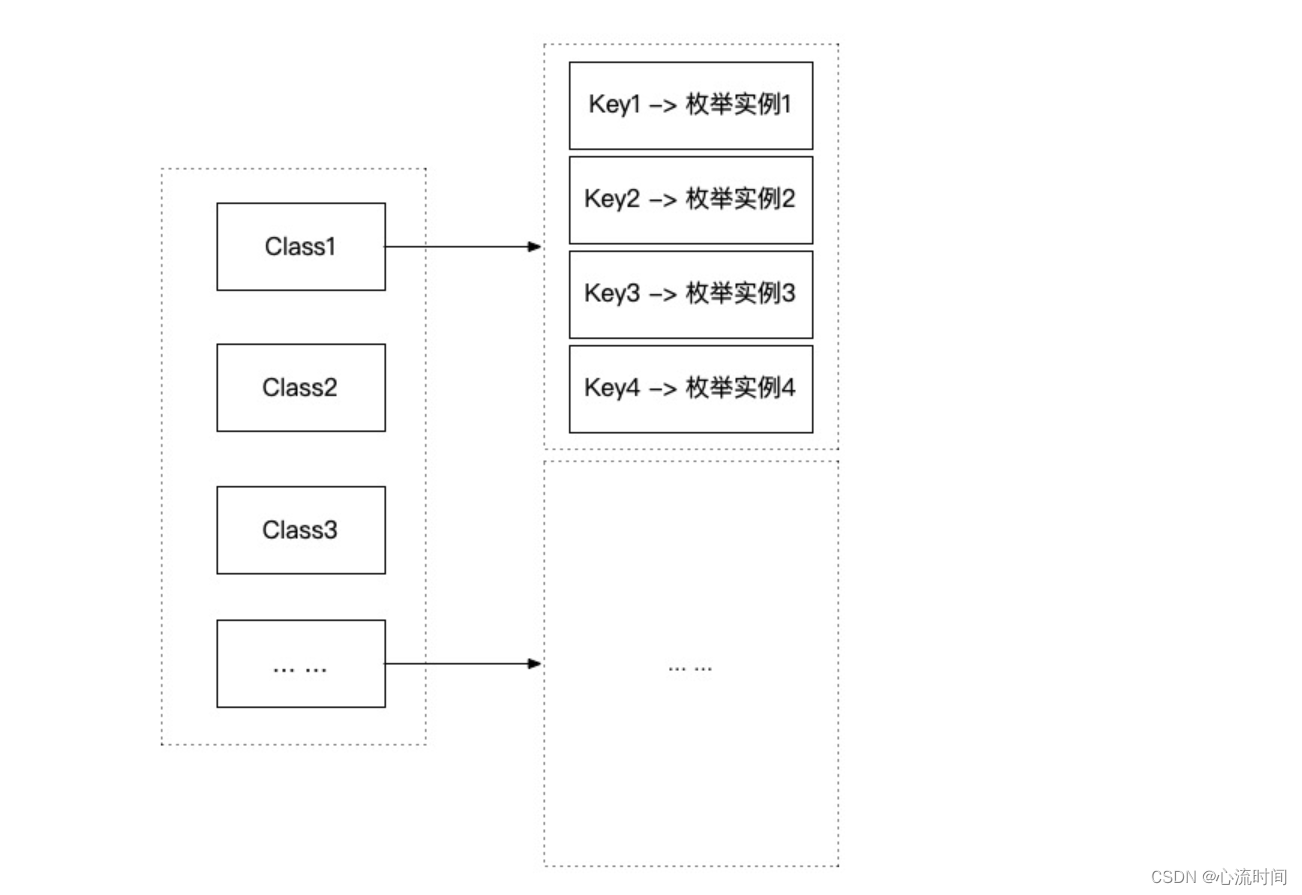
枚举缓存工具
此文章为笔记,为阅读其他文章的感受、补充、记录、练习、汇总,非原创,感谢每个知识分享者。 文章目录 1. 背景2. 枚举缓存3. 样例展示4. 性能对比5. 总结 本文通过几种样例展示如何高效优雅的使用java枚举消除冗余代码。 1. 背景 枚举在系统…...
)
【BASH】回顾与知识点梳理(二十五)
【BASH】回顾与知识点梳理 二十五 二十五. 特殊shell、PAM 模块、讯息传递和大量建置账号25.1 特殊shell特殊的 shell, /sbin/nologin 25.2 PAM模块25.3 Linux 主机上的用户讯息传递查询使用者: w, who, last, lastlog使用者对谈: write, mesg, wall使用…...

什么是Node js?什么是React?有什么区别
JavaScript是当今最流行的编程语言之一,它用于开发多种技术,两种这样的技术是Node.js和React。许多学生很难理解Nodejs和React之间的区别。 React和Nodejs之间的主要区别在于它们的使用位置。Nodejs 用于开发应用程序的服务器端,而Reactjs用于…...
使用postman做接口测试
1.接口测试:针对软件对外提供服务的接口的输入输出进行测试,以及接口间相互逻辑的测试,验证接口功能与接口描述文档的一致性 2.接口测试流程: 1)获取接口信息:通过接口文档或抓包来获取接口的基本调用方式和…...
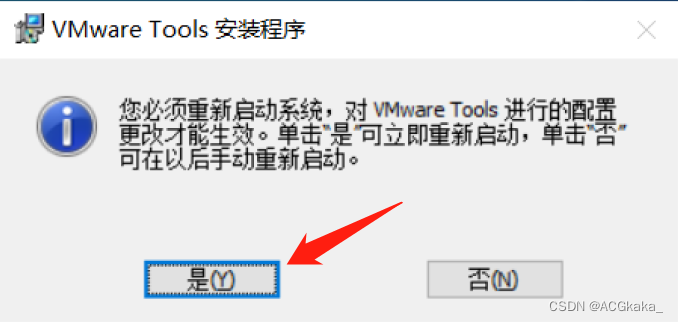
VMware Workstation 如何启用复制粘贴
产品:VMware Workstation 16 Pro 版本:16.1.1 build-17801498 我们刚安装好的 VMware Workstation 会发现无法复制粘贴文件到虚拟机中,如下为解决方案: 1.点击 虚拟机,点击 安装 VMware Tools(T)...。 2.虚拟机下面会…...
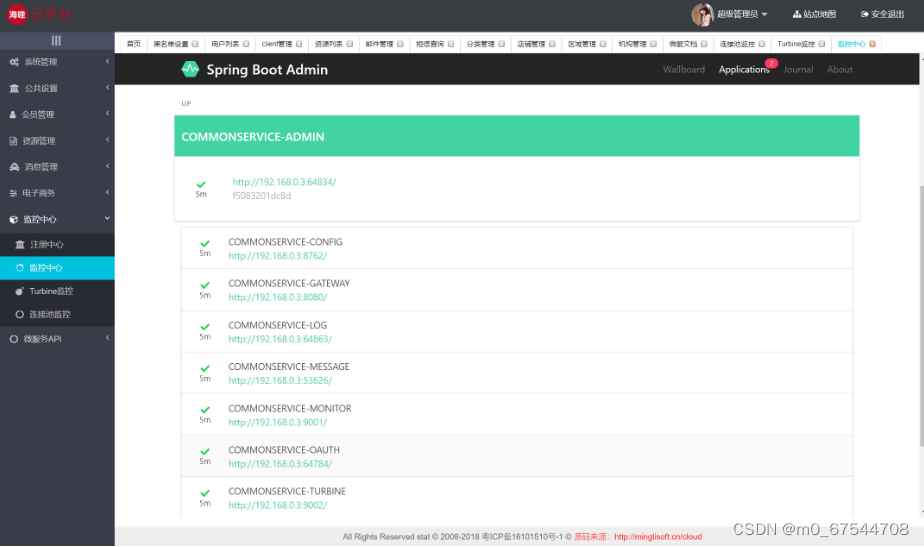
免费小程序商城搭建之b2b2c o2o 多商家入驻商城 直播带货商城 电子商务b2b2c o2o 多商家入驻商城 直播带货商城 电子商务 bbc
1. 涉及平台 平台管理、商家端(PC端、手机端)、买家平台(H5/公众号、小程序、APP端(IOS/Android)、微服务平台(业务服务) 2. 核心架构 Spring Cloud、Spring Boot、Mybatis、Redis 3. 前端…...
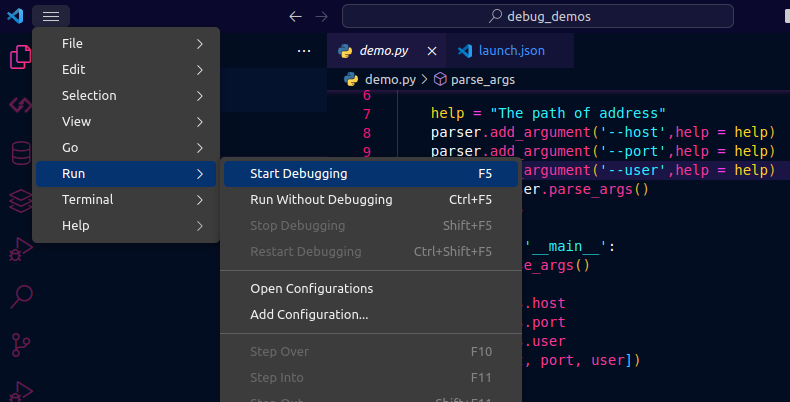
VSCode-Python传参数进行Debug
新建demo.py import argparse def parse_args():description "debug example" parser argparse.ArgumentParser(descriptiondescription) help "The path of address"parser.add_argument(--host,help help) parser.add_ar…...
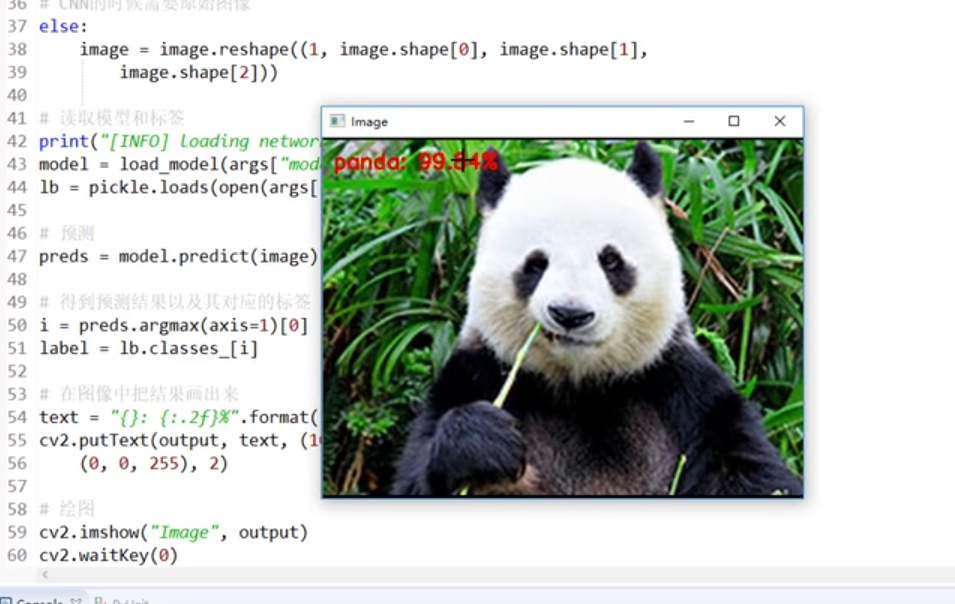
实践-传统深度学习
简介与安装 2 训练自己的数据集整体流程3 数据加载与预处理4 搭建网络模型5 学习率对结果的影响6 Drop-out操作7 权重初始化方法对比8 初始化标准差对结果的影响9 正则化对结果的影响10 加载模型进行测试 TensorFlow:每一步都需要自己做。 Keras:做起来更…...

爬虫:使用Selenium模拟人工操作及获取网页内容
专栏介绍 结合自身经验和内部资料总结的Python教程,每天3-5章,最短1个月就能全方位的完成Python的学习并进行实战开发,学完了定能成为大佬!加油吧!卷起来! 全部文章请访问专栏:《Python全栈教程(0基础)》 再推荐一下最近热更的:《大厂测试高频面试题详解》 该专栏对…...
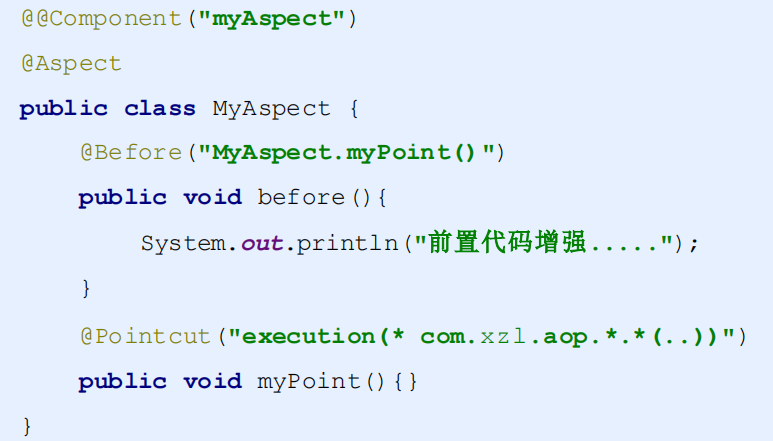
AOP开发
目录 1、简介 1.1、AOP 相关概念 1.2、AOP 开发明确的事项 1.3、知识要点 2、两种方式 3、基于 XML 3.1、快速入门 3.1.1、导入坐标 3.1.2、创建接口和实现类 3.1.3、创建切面 3.1.4、配置bean 3.1.5、配置织入 3.1.6、测试 3.2、切点表达式 3.2.1、表达式举例 …...

Streamlit项目: 轻松搭建部署个人博客网站
文章目录 1 前言1.1 探索 Streamlit:轻松创建交互式应用1.2 最全 Streamlit 教程专栏 2 我的个人博客网站已上线!2.1 一个集成了智能中医舌诊-中e诊专栏的博客网站2.2 前期准备2.3 使用 Streamlit Cloud 运行 3 知识点讲解3.1 实现多页面:两种…...

AArch64内存管理:MAIR_EL3寄存器详解与应用
1. AArch64内存管理基础与MAIR_EL3寄存器定位 在Armv8-A/v9-A架构中,内存管理单元(MMU)通过多级页表实现虚拟地址到物理地址的转换。当处理器执行内存访问时,MMU会遍历页表条目(Translation Table Entry),其中包含两个关键信息:目…...

Burp Suite深度解析:从流量抓包到业务逻辑漏洞挖掘
1. 这不是“学个插件”——Burp Suite 是渗透测试的呼吸系统 很多人第一次听说 Burp Suite,是在某篇“三步拿下登录框”的速成教程里:装好Java、拖进浏览器代理、点几下Repeater就弹出密码明文。结果真去测一个中型SaaS后台,不到十分钟就卡在…...
)
保姆级教程:Windows系统下Arcgis 10.2从下载、安装到汉化一次搞定(附常见License启动失败解决方案)
Windows系统下Arcgis 10.2完整安装与汉化实战指南第一次接触Arcgis的新手往往会被复杂的安装流程和神秘的License Manager搞得晕头转向。作为一款功能强大的地理信息系统软件,Arcgis在科研、城市规划、环境监测等领域有着广泛应用,但它的安装过程确实会让…...

Burp Suite拦截与替换机制深度解析:从协议层到规则链
1. 这不是“点开就能用”的功能,而是你和目标系统之间的一道可编程闸门很多人第一次在Burp Suite里点开Proxy → Intercept,看到HTTP请求被拦下来,兴奋地改个User-Agent、删个Cookie就点Forward,以为自己已经掌握了“拦截与替换”…...

关联规则挖掘在Calabi-Yau流形Hodge数分析中的应用与复现
1. 项目概述:当数据挖掘遇见高维几何在理论物理和代数几何的交叉领域,Calabi-Yau流形一直扮演着核心角色。这些具有特殊拓扑结构的空间,不仅是弦理论中额外维度紧化的关键候选者,其本身丰富的数学性质也吸引着无数研究者。然而&am…...

树莓派工业GPIO接口板:电气隔离与电平转换实战指南
1. 项目概述:为什么需要一块工业级GPIO接口板?如果你用树莓派做过一些硬件项目,尤其是涉及到控制继电器、电机或者连接工业设备(比如PLC、变频器)时,大概率踩过这样的坑:直接用树莓派的GPIO引脚…...

基于TESS光变曲线与深度学习的O型星物理参数预测研究
1. 项目概述与核心挑战在恒星天体物理研究中,大质量O型星扮演着至关重要的角色。它们不仅是宇宙中光度最高的天体之一,其强烈的辐射、恒星风和最终的超新星爆发,更是驱动星系化学演化和能量注入星际介质的关键引擎。然而,深入理解…...

学了几天 Web 安全,终于搞懂什么是 XSS 了
xss的详细介绍最近开始正式学习 Web 安全。前面陆续学了:HTTPCookieSessionJWT RBAC然后发现很多地方都会提到一个东西:XSS以前一直感觉这个漏洞很抽象。网上很多文章一上来就是:<script>alert(1)</script>然后说:“弹…...

如何快速掌握MPC视频渲染器:面向初学者的完整教程
如何快速掌握MPC视频渲染器:面向初学者的完整教程 【免费下载链接】VideoRenderer Внешний видео-рендерер 项目地址: https://gitcode.com/gh_mirrors/vi/VideoRenderer 想要在Windows系统上获得影院级的视频播放体验吗?MPC…...

DLA功耗优化验证:tegrastats实战指南
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...