STM32--TIM定时器(2)
文章目录
- 输出比较
- PWM
- 输出比较通道
- 参数计算
- 舵机简介
- 直流电机简介
- TB6612
- PWM基本结构
- PWM驱动呼吸灯
- PWM驱动舵机
- PWM控制电机
输出比较
输出比较,简称OC(Output Compare)。
输出比较的原理是,当定时器计数值与比较值相等或者满足某种特定条件时,比较通道会产生一个输出信号,这个输出信号可以用来触发外部事件,如控制其他外设的操作,或者驱动外部电路。
在每个高级定时器和通用定时器都拥有4个输出比较通道。
高级定时器的前3个通道额外拥有死区生成和互补输出的功能。
PWM
我们可以利用输出比较来对外产生一个PWM频率。
PWM(Pulse Width Modulation)脉冲宽度调制,是一种常用的控制信号技术。通过改变信号的脉冲宽度来控制电力开关装置的平均功率。在PWM中,周期保持不变,而脉冲的宽度可以根据需要进行调整。
PWM技术广泛应用于电力电子领域,特别是在电机控制和电源调节方面。通过调整PWM信号的占空比(脉冲宽度与周期之比),可以精确地控制输出信号的平均电压或电流。这种控制方式可以实现对电机速度、亮度、电压等参数的精确控制,具有高效率、高精度和低成本的优点。
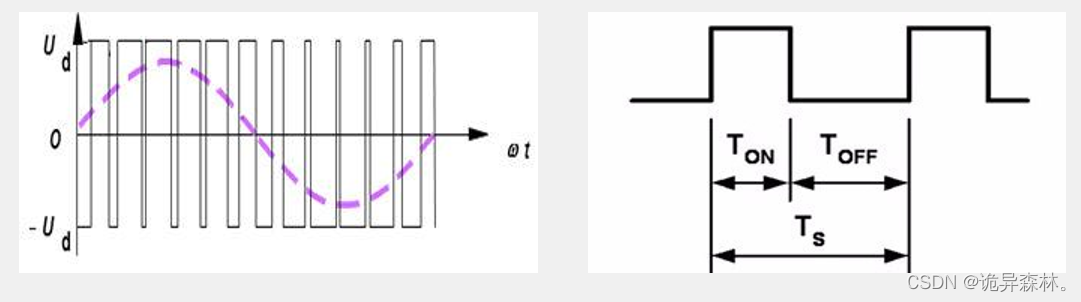
频率=1/Ts;占空比=Ton/Ts;分辨率=占空比的变化步距。
我们可以利用输出比较,对输出电平进行一定程度的控制,就能输出PWM频率。
输出比较通道
通用定时器总框图。
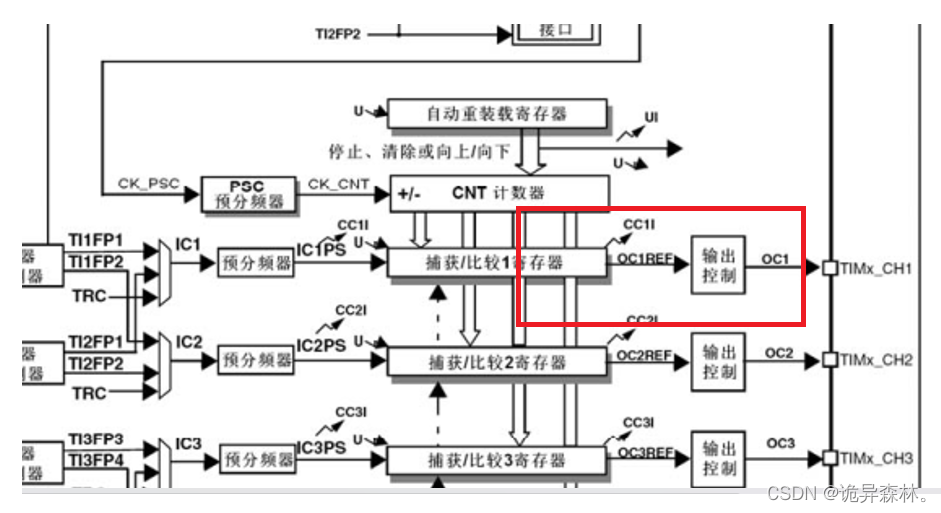
放大效果:
在比较通道左边,CNT计数器与捕获/比较寄存器中的值进行比较大小,再根据控制器,就会输出一定的电平。
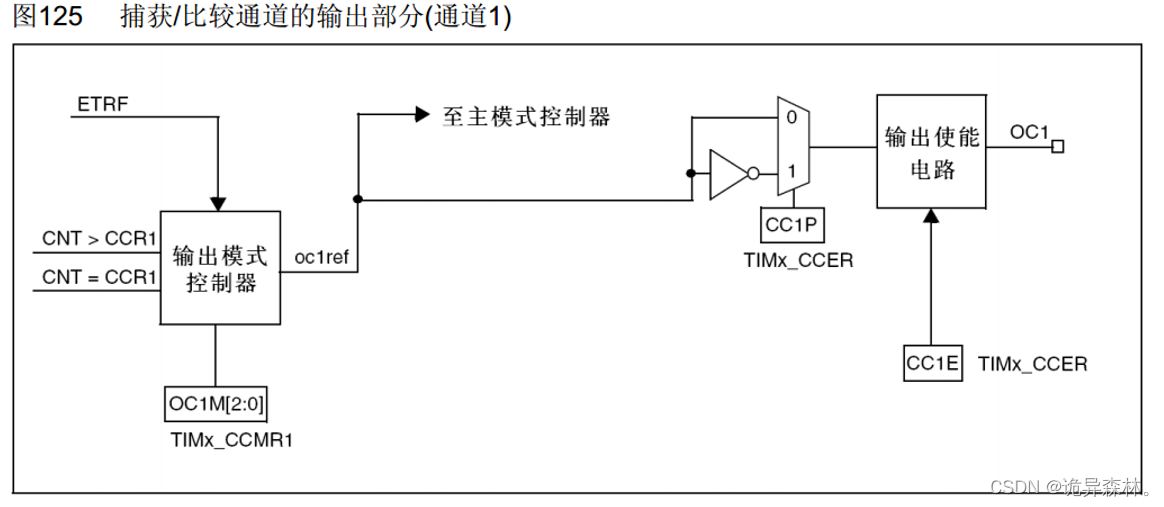
ETRF是定时器的小功能,一般不用到。
REF(rreference)实际上就是指这里信号的高低电平。REF可以映射到主模式的TRGO输出上去;REF的主要去向是去到输出使能电路,它会先走向一个寄存器,如果寄存器输出为0,那么电平将不翻转,保持原样;如果信号为1,REF会通向一个非门取反,也就是高低电平翻转的信号;接着通过使能电路,将有一个寄存器(CC1E)控制;最后到OC1引脚,接到CH1通道上。
输出模式控制器,可以根据自己需求来选择模式:

参数计算
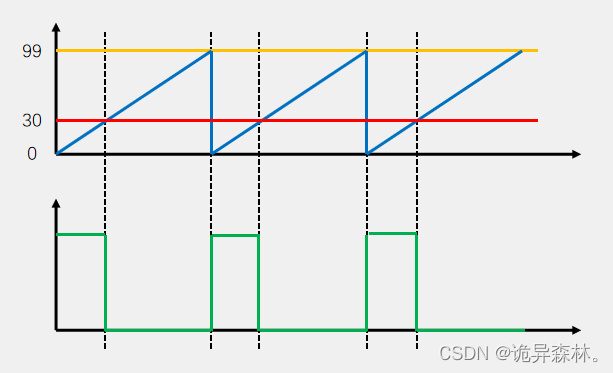
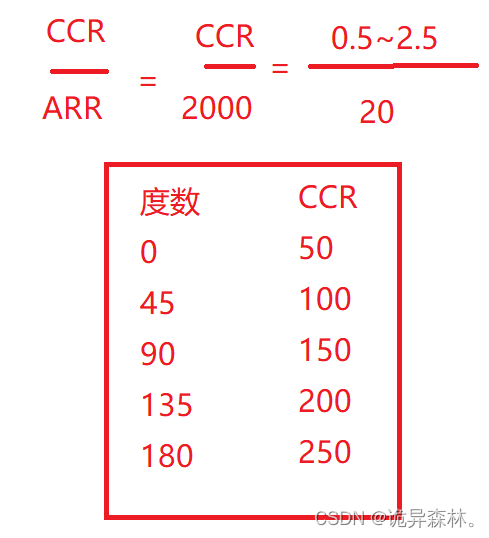
红色线表示CCR,也就是比较值;黄色线表示自动装载寄存器中的值(ARR);蓝色线表示计数值CNT;
当CNT<CCR时,输出高电平;当CNT>=CCR时,输出低电平。
这里对应的是PWM模式1的向上计数。
PWM频率: Freq = CK_PSC / (PSC + 1) / (ARR + 1)
PWM占空比: Duty = CCR / (ARR + 1)
PWM分辨率: Reso = 1 / (ARR + 1)
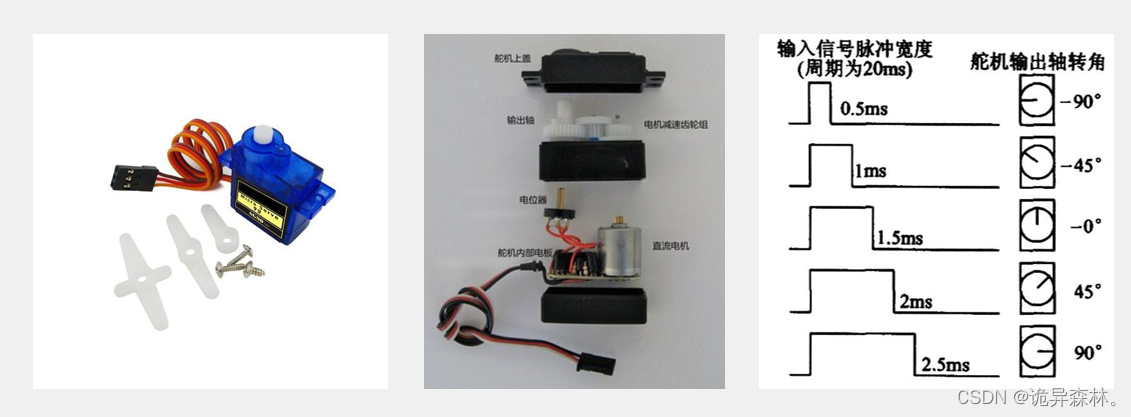
舵机简介
舵机(Servo)是一种常用的电动执行器,通常用于控制机械运动和定位定位。它由一个直流电机、减速装置、位置反馈装置和控制电路组成。
舵机的工作原理是控制电路根据输入信号生成特定的PWM信号,并驱动直流电机和减速装置运转,使输出轴转动到所需的位置。位置反馈装置(常用的是旋转式电位器)会实时监测输出轴的位置,并将信息反馈给控制电路,以便进行修正和精确控制。
SG90使用要求:输入PWM信号要求:周期为20ms,高电平宽度为0.5ms~2.5ms
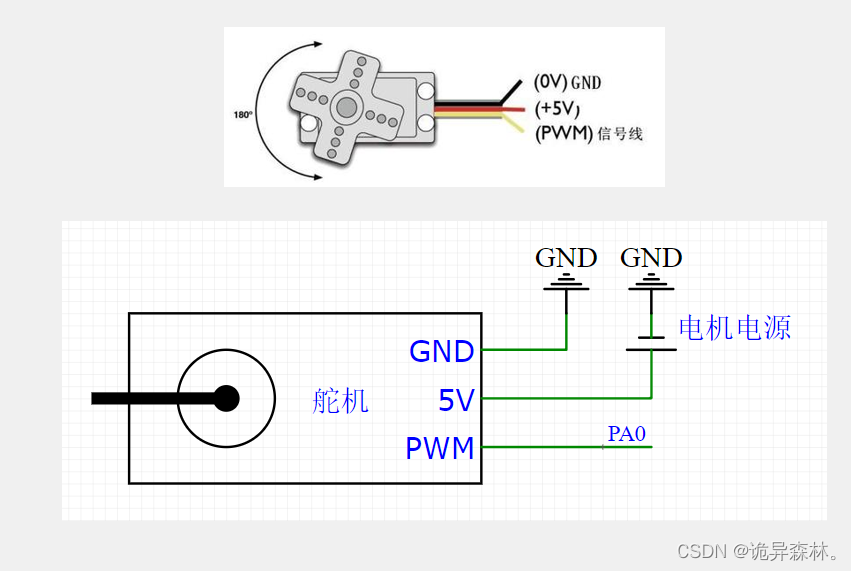
硬件电路:
直流电机简介
直流电机是一种将电能转换为机械能的装置,有两个电极,当电极正接时,电机正转,当电极反接时,电机反转。
直流电机属于大功率器件,GPIO口无法直接驱动,需要配合电机驱动电路来操作。
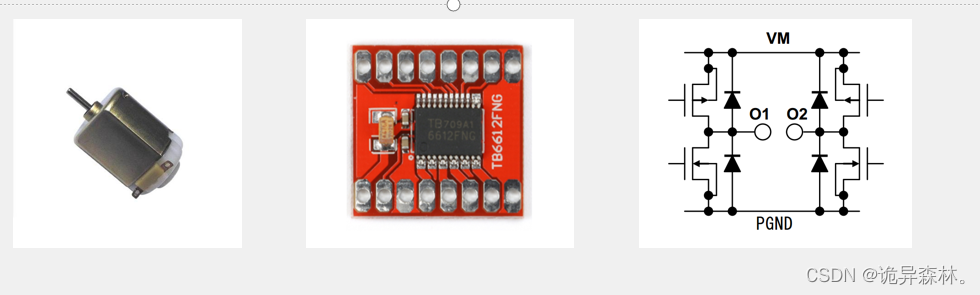
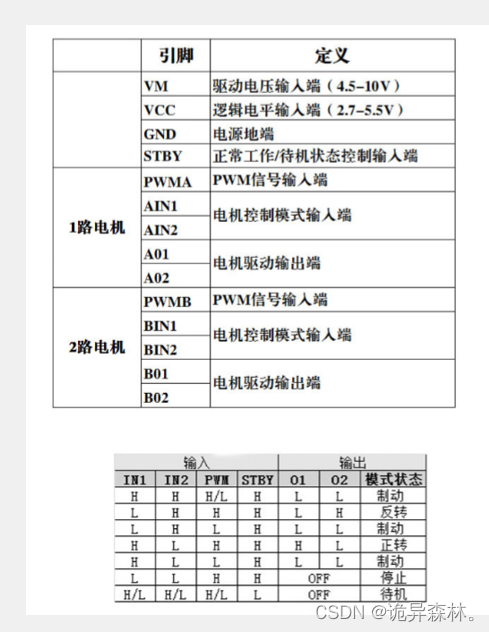
TB6612
TB6612是一款双路H桥型的直流电机驱动芯片,常用于控制直流电机的转动方向和速度。它具有高效率、低功耗和高输出等特点,适用于各种电机驱动应用。
TB6612芯片内部集成了H桥驱动电路,可通过控制引脚实现正转、反转、制动和浮动等操作。它可以工作于3.3V或5V逻辑电平,支持PWM输入控制电机速度,并提供过流保护功能,防止电机过载。
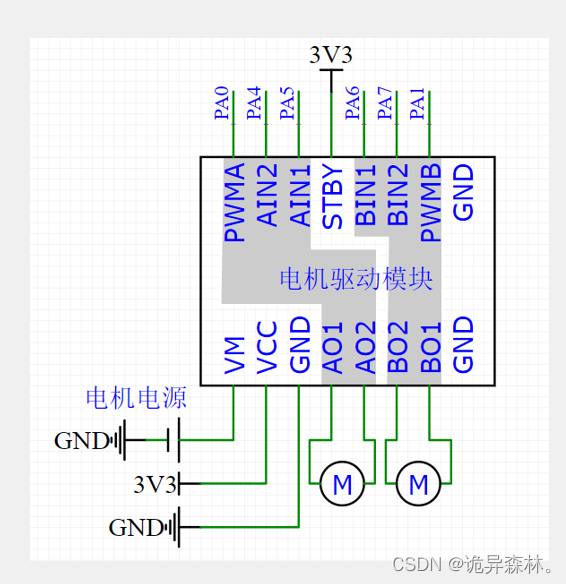
硬件电路:
PWM基本结构
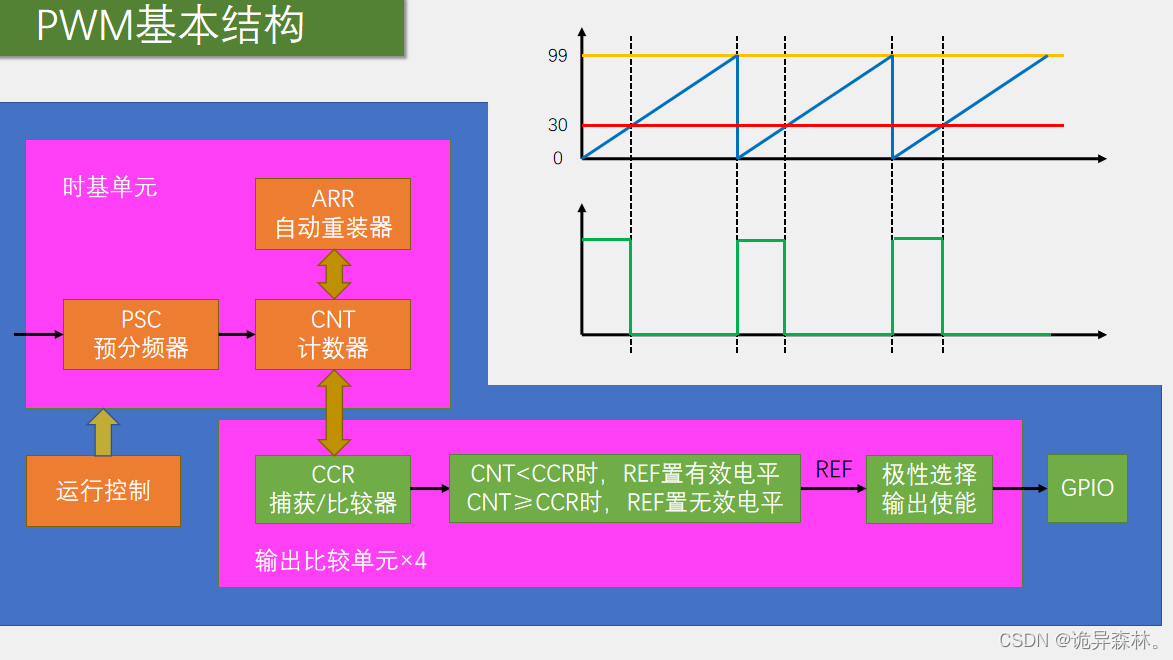
通过配置时基单元,,让计时器驱动与CCR比较,在PWM模式1下输出电平最后通向GPIO口。
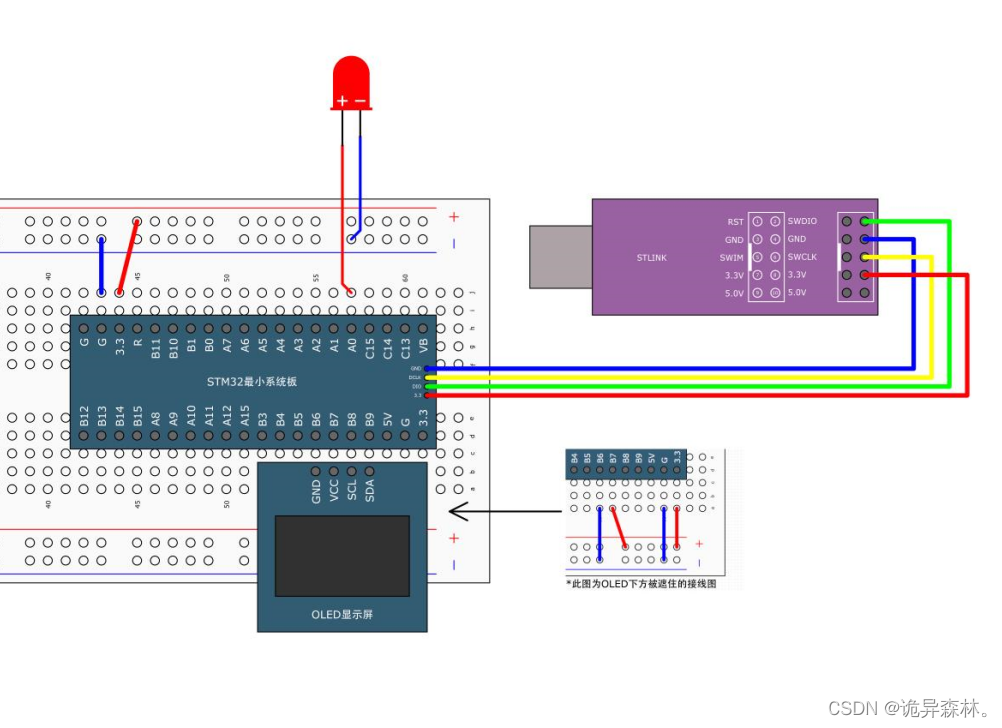
PWM驱动呼吸灯
接线模式:
PWM.h
#ifndef __PWM_H__
#define __PWM_H__void PWM_Init();
void PWM_SetCompare(uint16_t Compare);#endifPWM.c
#include "stm32f10x.h" // Device headervoid PWM_Init()
{//开启APB1外设开关RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2,ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP; //复用推挽输出GPIO_InitStructure.GPIO_Pin=GPIO_Pin_0;GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOA,&GPIO_InitStructure);//配置内部时钟TIM2TIM_InternalClockConfig(TIM2);//时钟结构体初始化TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure;TIM_TimeBaseInitStructure.TIM_ClockDivision=TIM_CKD_DIV1; //不分频TIM_TimeBaseInitStructure.TIM_CounterMode=TIM_CounterMode_Up; //计时器模式TIM_TimeBaseInitStructure.TIM_Period=100-1; //自动加载寄存器周期值TIM_TimeBaseInitStructure.TIM_Prescaler=1-1; //预分频值TIM_TimeBaseInitStructure.TIM_RepetitionCounter=0; //指定重复计时器的值,这里不用到TIM_TimeBaseInit(TIM2,&TIM_TimeBaseInitStructure);//配置输出比较结构体TIM_OCInitTypeDef TIM_OCInitStructure;TIM_OCStructInit(&TIM_OCInitStructure);TIM_OCInitStructure.TIM_OCMode=TIM_OCMode_PWM1; //配置输出比较模式TIM_OCInitStructure.TIM_OCPolarity=TIM_OCPolarity_High; //指定输出极性TIM_OCInitStructure.TIM_OutputState=TIM_OutputState_Enable;//输出比较状态TIM_OCInitStructure.TIM_Pulse=0; //指定要捕获的脉冲值CCRTIM_OC1Init(TIM2,&TIM_OCInitStructure);//启用TIM2外设控制TIM_Cmd(TIM2,ENABLE);}
//设置CCR比较值
void PWM_SetCompare(uint16_t Compare)
{TIM_SetCompare1(TIM2,Compare);
}对于GPIO口来说,不止是接通了外设,还需要将PWM频率传输给外设,所以使用了复用推挽输出。
输出比较结构体有多个成员,我们这里一些成员不用到,所以先进行结构体初始化,再进行对一些成员的赋值。
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "PWM.h"uint16_t i;int main()
{OLED_Init();PWM_Init();while(1){for(i=0;i<=100;i++){PWM_SetCompare(i);Delay_ms(10);}for(i=0;i<=100;i++){PWM_SetCompare(100-i);Delay_ms(10);}}
}
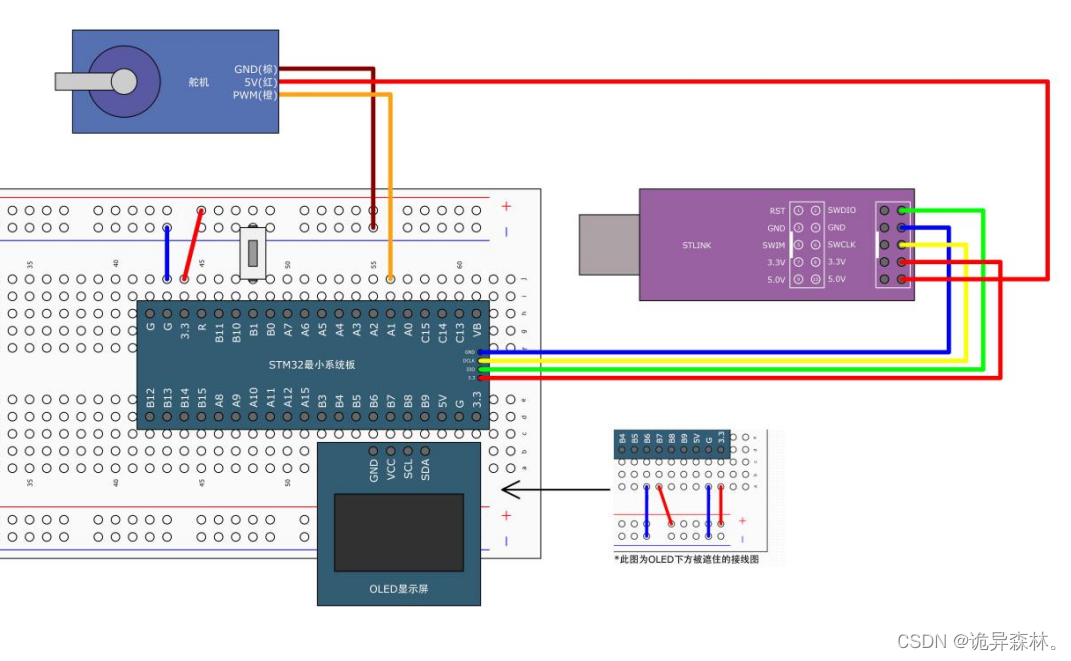
PWM驱动舵机
OLED函数所取地址
连接方式:
SYTM32驱动电压只有3.3V,舵机需要5V的驱动电压;
Servo.c
#include "stm32f10x.h" // Device header
#include "PWM.h"void Servo_Init()
{PWM_Init();
}void Servo_SetAngle(float Angle)
{PWM_SetCompare(Angle/180*200+50);
}Servo.h
#ifndef __SERVO_H__
#define __SERVO_H__void Servo_Init();
void Servo_SetAngle(float Angle);#endif这里的PWM频率是有要求的,所以需要将PWM.c的CNT和ARR进行修改:频率=72M/720/2000=50Hz。
这里的转动度数需要根据占空比来进行计算:
Key.c

#include "stm32f10x.h" // Device header
#include "Delay.h"void Key_Init(void)
{//设置APB2外设时钟开关RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//对结构体成员的选择GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//结构体初始化GPIO_Init(GPIOB, &GPIO_InitStructure);
}//获取键码
uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0;if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Delay_ms(20);while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);Delay_ms(20);KeyNum = 1;}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0){Delay_ms(20);while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0);Delay_ms(20);KeyNum = 2;}return KeyNum;
}Key.h
#ifndef __KEY_H_
#define __KEY_H_void Key_Init(void);
uint8_t Key_GetNum(void);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Servo.h"
#include "Key.h"
uint16_t angle;
int main()
{OLED_Init();Servo_Init();Key_Init();OLED_ShowString(1,1,"Angle:");while(1){if(Key_GetNum()==1){angle+=30;if(angle>180){angle=0;}}Servo_SetAngle(angle);OLED_ShowNum(1,7,angle,3);}}PWM控制电机
接线方式:

Motor.h
#ifndef __MOTOR_H__
#define __MOTOR_H__void Motor_init();
void Motor_GetSpeed(int8_t Speed);#endif Motor.c
#include "stm32f10x.h" // Device header
#include "PWM.h"void Motor_init()
{//设置APB2外设时钟开关RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//对结构体成员的选择GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_4 | GPIO_Pin_5;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//结构体初始化GPIO_Init(GPIOA, &GPIO_InitStructure);PWM_Init();
}
//速度输入函数
void Motor_GetSpeed(int8_t Speed)
{if(Speed>=0){GPIO_SetBits(GPIOA,GPIO_Pin_5);GPIO_ResetBits(GPIOA,GPIO_Pin_4);PWM_SetCompare(Speed);}else{GPIO_SetBits(GPIOA,GPIO_Pin_4);GPIO_ResetBits(GPIOA,GPIO_Pin_5);PWM_SetCompare(-Speed);}
}PWM的占空比作为速度的调节,两个接口的正反接作为方向的控制。
对于电机驱动电路所接引脚,需要进行GPIO口的初始化;
当输入速度为负时,将接口上引脚进行电平翻转,读者可以进行尝试,怎么接为正,怎么接为负;对于小于0的速度,需要加上符号变成正数。
main.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Motor.h"
#include "Key.h"
int8_t Speed;
int main()
{OLED_Init();Motor_init();Key_Init();OLED_ShowString(1,1,"Speed:");while(1){if(Key_GetNum()==1){Speed+=20;if(Speed>100){Speed=-100;}}Motor_GetSpeed(Speed);OLED_ShowSignedNum(1,7,Speed,3);}
}相关文章:
STM32--TIM定时器(2)
文章目录 输出比较PWM输出比较通道参数计算舵机简介直流电机简介TB6612 PWM基本结构PWM驱动呼吸灯PWM驱动舵机PWM控制电机 输出比较 输出比较,简称OC(Output Compare)。 输出比较的原理是,当定时器计数值与比较值相等或者满足某种…...

git Authentication failed
情况是这样的,之前看代码只是clone了一份,但随着分支越来越多,有时候切换分支时必须先把修改的代码 stash 一下,觉得很麻烦,于是又clone了一份代码。然后pull代码是正常的,当push 代码的时候,去…...
【软考】2023系统架构设计师考试
目录 1 软考资格设置 2 考试报名 3 考试准备 4 参加考试 5 考试感受 6 其他 1 软考资格设置 2 考试报名 报名网址:https://www.ruankao.org.cn/ 3 考试准备 4 参加考试 2023年下半年系统架构设计师考试时间为11月4、5日。 5 考试感受 6 其他 最近好像有地区…...

opencv基础55-获取轮廓的特征值及示例
轮廓自身的一些属性特征及轮廓所包围对象的特征对于描述图像具有重要意义。本节介绍几个轮廓自身的属性特征及轮廓所包围对象的特征。 宽高比 可以使用宽高比(AspectRation)来描述轮廓,例如矩形轮廓的宽高比为: 宽高比 宽度&am…...
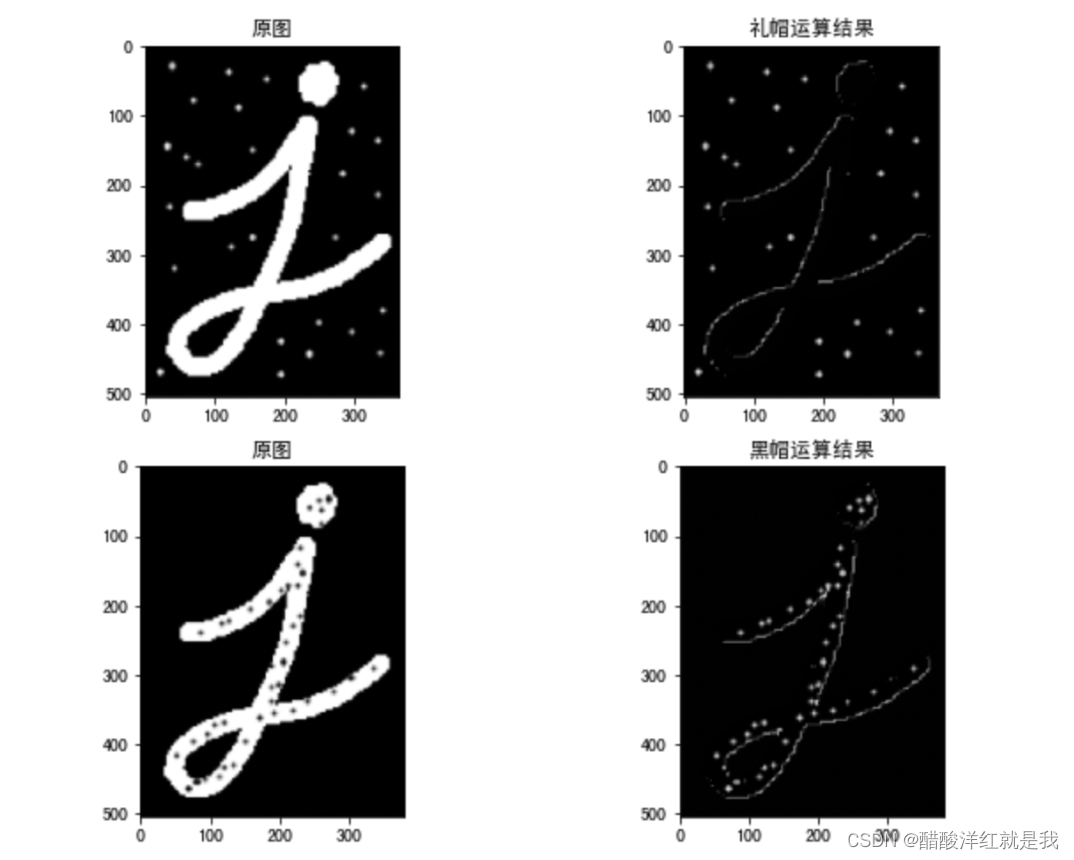
OpenCV图像处理——形态学操作
目录 连通性形态学操作腐蚀和膨胀开闭运算礼帽和黑帽 连通性 形态学操作 形态学转换是基于图像形状的一些简单操作。它通常在二进制图像上执行。腐蚀和膨胀时两个基本的形态学运算符。然后它的变体形式如开运算,闭运算,礼帽黑帽等 腐蚀和膨胀 cv.erode…...

修改VS Code终端的显示行数
文章目录 前言修改VS Code终端显示行数参考 前言 在我们使用VS Code运行代码的过程中,有时需要再终端中显示很多的运行过程信息或者结果。然而,VS Code的终端默认显示1000行的内容,随着显示内容的增多,之前的内容就丢失了。为了解…...
C++学习| MFC简单入门
前言:因为接手了CMFC的程序,所以需要对MFC编程方面有所了解。 C之MFC简单入门 MFC相关的概念MFCWIN32QT MFC项目基本操作MFC项目创建MFC项目文件解读界面和代码数据交互——加法器 MFC相关的概念 MFC MFC(Microsoft Foundation Classes微软…...

“一日之际在于晨”,欢迎莅临WAVE SUMMIT上午场:Arm 虚拟硬件早餐交流会
8月16日,盛夏的北京将迎来第九届WAVE SUMMIT深度学习开发者大会。在峰会主论坛正式开启前,让我们先用一份精美的元气早餐,和一场“Arm虚拟硬件交流会”,唤醒各位开发小伙伴的开发魂! 8月16日,WAVE SUMMIT大…...

leetcode454. 四数相加 II
题目:leetcode454. 四数相加 II 描述: 给你四个整数数组 nums1、nums2、nums3 和 nums4 ,数组长度都是 n ,请你计算有多少个元组 (i, j, k, l) 能满足: 0 < i, j, k, l < n nums1[i] nums2[j] nums3[k] num…...

PHP证券交易员学习网站mysql数据库web结构apache计算机软件工程网页wamp
一、源码特点 PHP证券交易员学习网站 是一套完善的web设计系统,对理解php编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。 下载地址https://download.csdn.net/download/qq_41221322/88205549 PHP证券交易员…...
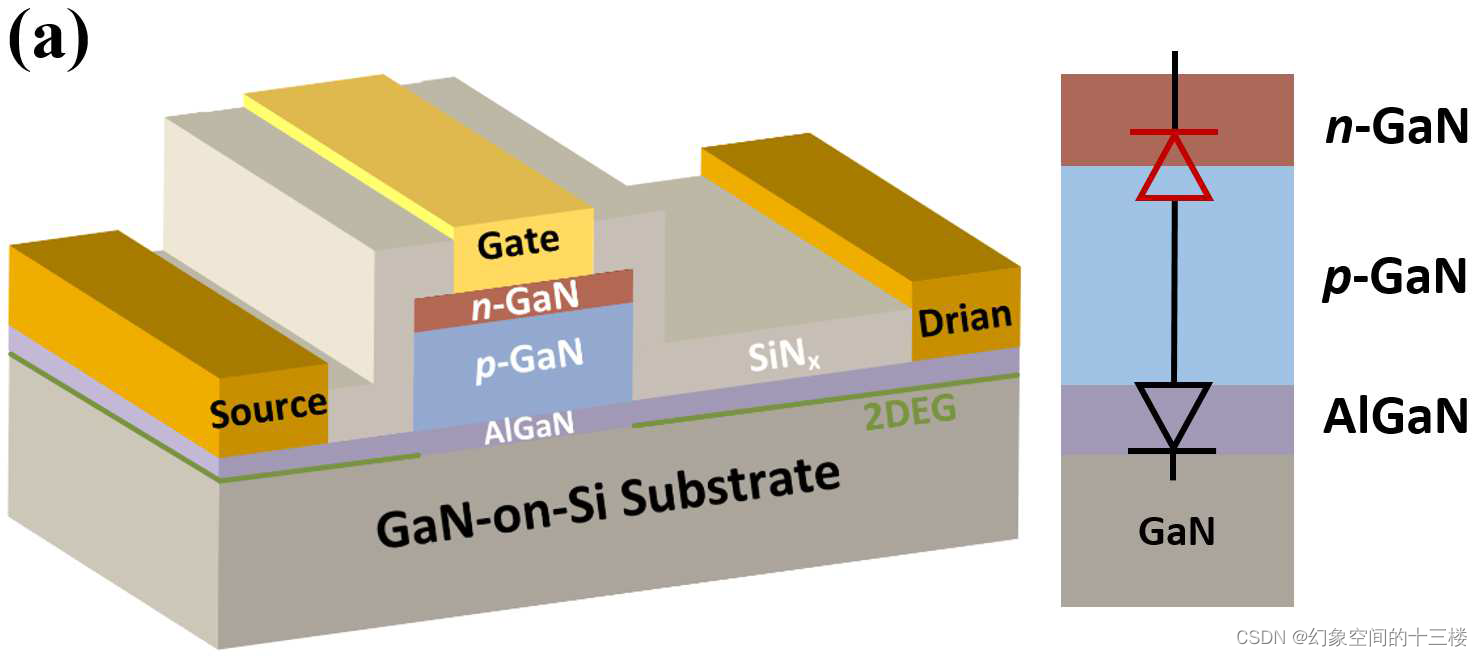
对p-n结/AlGaN/GaN HEMTs中n-GaN掺杂浓度对栅极可靠性的影响
目录 第35届功率半导体器件与集成电路国际研讨会论文集2023年5月28日至6月1日,中国香港南方科技大学电气电子工程系,深圳标题:Impacts of n-GaN Doping Concentration on Gate Reliability of p-n Junction/AlGaN/GaN HEMTs摘要信息解释研究了…...

Mac M2 Pro安装使用Cocoapods
Mac Pro M2安装使用Cocoapods 在新公司要做iOS开发,所以在新电脑上安装Cocoapods 在升级gem,sudo gem update --system,和安装cocoapods时都遇到如下的提示: ERROR: While executing gem ... (Errno::EPERM)Operation not per…...
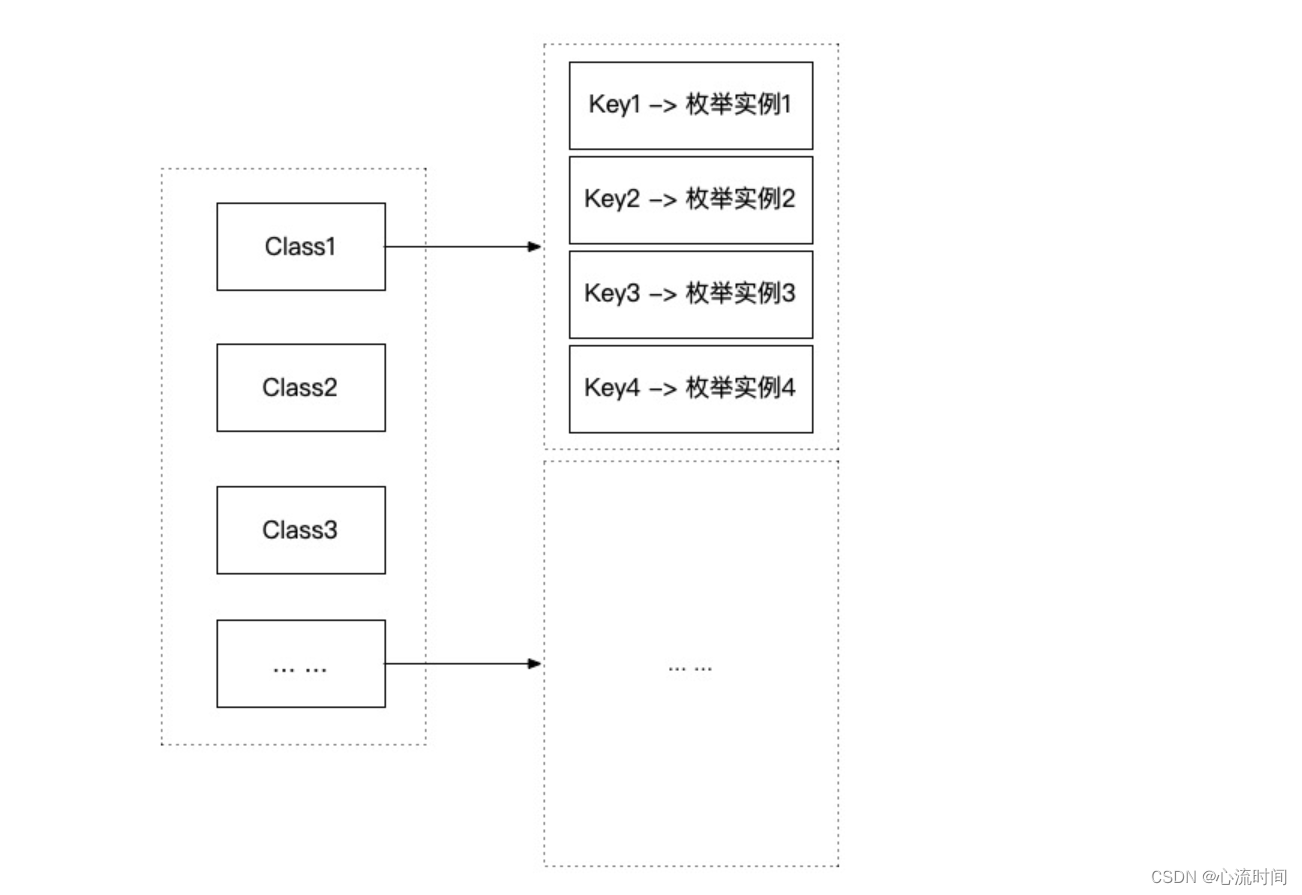
枚举缓存工具
此文章为笔记,为阅读其他文章的感受、补充、记录、练习、汇总,非原创,感谢每个知识分享者。 文章目录 1. 背景2. 枚举缓存3. 样例展示4. 性能对比5. 总结 本文通过几种样例展示如何高效优雅的使用java枚举消除冗余代码。 1. 背景 枚举在系统…...
)
【BASH】回顾与知识点梳理(二十五)
【BASH】回顾与知识点梳理 二十五 二十五. 特殊shell、PAM 模块、讯息传递和大量建置账号25.1 特殊shell特殊的 shell, /sbin/nologin 25.2 PAM模块25.3 Linux 主机上的用户讯息传递查询使用者: w, who, last, lastlog使用者对谈: write, mesg, wall使用…...

什么是Node js?什么是React?有什么区别
JavaScript是当今最流行的编程语言之一,它用于开发多种技术,两种这样的技术是Node.js和React。许多学生很难理解Nodejs和React之间的区别。 React和Nodejs之间的主要区别在于它们的使用位置。Nodejs 用于开发应用程序的服务器端,而Reactjs用于…...
使用postman做接口测试
1.接口测试:针对软件对外提供服务的接口的输入输出进行测试,以及接口间相互逻辑的测试,验证接口功能与接口描述文档的一致性 2.接口测试流程: 1)获取接口信息:通过接口文档或抓包来获取接口的基本调用方式和…...
VMware Workstation 如何启用复制粘贴
产品:VMware Workstation 16 Pro 版本:16.1.1 build-17801498 我们刚安装好的 VMware Workstation 会发现无法复制粘贴文件到虚拟机中,如下为解决方案: 1.点击 虚拟机,点击 安装 VMware Tools(T)...。 2.虚拟机下面会…...
免费小程序商城搭建之b2b2c o2o 多商家入驻商城 直播带货商城 电子商务b2b2c o2o 多商家入驻商城 直播带货商城 电子商务 bbc
1. 涉及平台 平台管理、商家端(PC端、手机端)、买家平台(H5/公众号、小程序、APP端(IOS/Android)、微服务平台(业务服务) 2. 核心架构 Spring Cloud、Spring Boot、Mybatis、Redis 3. 前端…...
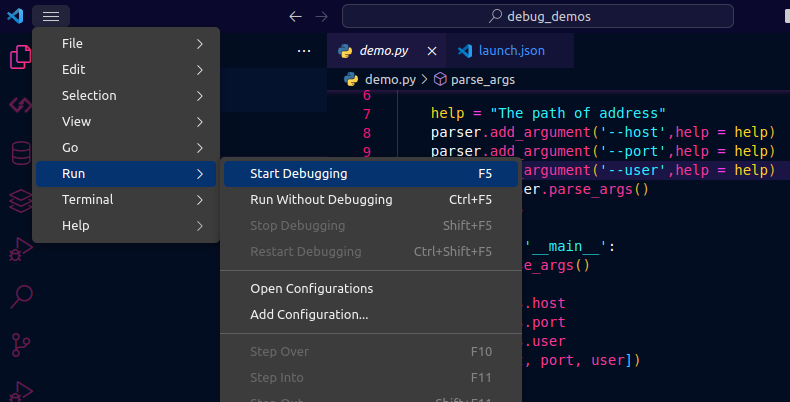
VSCode-Python传参数进行Debug
新建demo.py import argparse def parse_args():description "debug example" parser argparse.ArgumentParser(descriptiondescription) help "The path of address"parser.add_argument(--host,help help) parser.add_ar…...
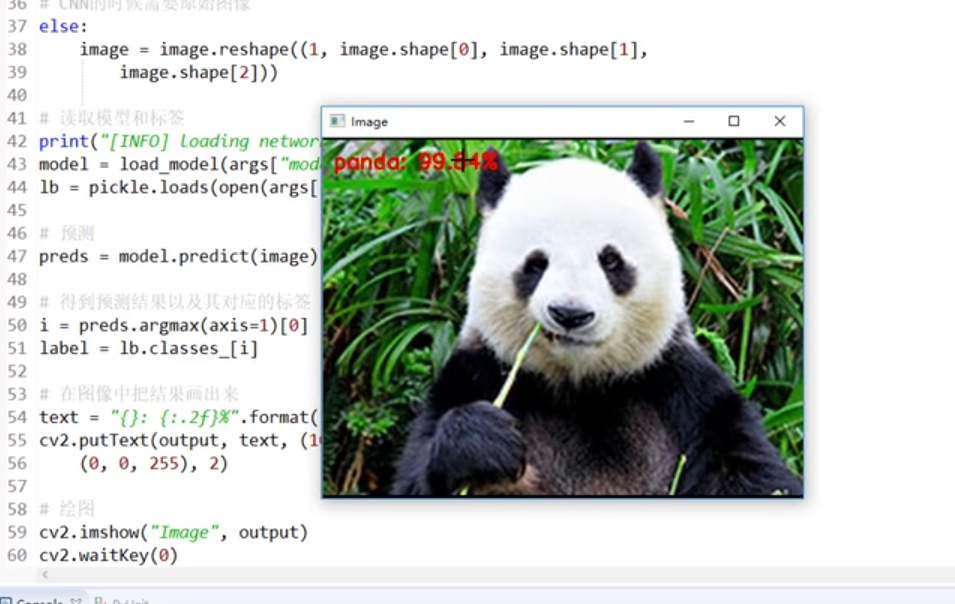
实践-传统深度学习
简介与安装 2 训练自己的数据集整体流程3 数据加载与预处理4 搭建网络模型5 学习率对结果的影响6 Drop-out操作7 权重初始化方法对比8 初始化标准差对结果的影响9 正则化对结果的影响10 加载模型进行测试 TensorFlow:每一步都需要自己做。 Keras:做起来更…...

【CP-05】RTE运行时环境 - SWC的操作系统接口
CP-05_RTE运行时环境【CP-05】RTE运行时环境 - SWC的“操作系统接口”前言在AUTOSAR架构中,RTE(Runtime Environment,运行时环境)是一个常被提及却难以理解的概念。它像是应用层软件组件(SW-C)与底层基础软…...

基于Arduino与应变片传感器的高精度厨房电子秤DIY全攻略
1. 项目概述:用Arduino打造一台高精度厨房电子秤作为一个喜欢在厨房里折腾的硬件爱好者,我经常遇到需要精确称量食材的场合。市面上的电子秤要么精度不够,要么价格不菲,要么功能单一。于是,我萌生了自己动手做一台的想…...

自制BLE112串口编程器:基于Bootloader的免调试器烧录方案
1. 项目概述:为BLE112模块打造一款免调试器的RS232编程器在嵌入式开发,特别是早期的蓝牙低功耗(BLE)模块应用中,我们常常会遇到一个棘手的问题:官方开发工具链的依赖和限制。以Silicon Labs(当时…...

Wechat2RSS:微信公众号转RSS订阅工具
文章目录Wechat2RSS:微信公众号转RSS订阅工具Wechat2RSS:微信公众号转RSS订阅工具 ttttmr开源的Wechat2RSS项目,目前在GitHub上获得1409颗Star,项目地址为https://github.com/ttttmr/Wechat2RSS。该工具的核心作用是将微信公众号…...

孤舟笔记 互联网常用框架篇二 Dubbo服务请求失败怎么处理?集群容错策略你用过几种
文章目录先说结论Failover:换家店试试Failfast:不行就算了Failsafe:忘了这事Failback:回头再说Forking:同时点几家Broadcast:通知所有人怎么选择回答技巧与点评加分回答面试官点评个人网站分布式系统中&…...

浏览器指纹识别机制深度剖析与反识别技术实现
一、浏览器指纹技术基础认知1.1 浏览器指纹的核心定义在数字化时代,每一台接入互联网的设备都会留下独特的数字标识,浏览器指纹便是其中最关键的识别凭证之一。浏览器指纹是网站通过 JavaScript 脚本、HTTP 请求头、硬件接口调用等多种技术手段ÿ…...

render_async嵌套渲染:构建复杂异步界面的完整解决方案
render_async嵌套渲染:构建复杂异步界面的完整解决方案 【免费下载链接】render_async render_async lets you include pages asynchronously with AJAX 项目地址: https://gitcode.com/gh_mirrors/re/render_async 在现代Web开发中,页面加载速度…...

DLA功耗优化验证:tegrastats实战指南
重磅预告:本专栏将独家连载系列丛书《智能体视觉技术与应用》部分精华内容,该书是世界首套系统阐述“因式智能体”视觉理论与实践的专著,特邀美国 TypeOne 公司首席科学家、斯坦福大学博士 Bohan 担任技术顾问。Bohan先生师从美国三院院士、“…...

三步破解百度网盘限速:免费获取真实下载链接的终极指南
三步破解百度网盘限速:免费获取真实下载链接的终极指南 【免费下载链接】baidu-wangpan-parse 获取百度网盘分享文件的下载地址 项目地址: https://gitcode.com/gh_mirrors/ba/baidu-wangpan-parse 还在为百度网盘几十KB的龟速下载而苦恼吗?想要彻…...

如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南
如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 想让你的老旧Mac设备重新焕发活力&a…...