机器人CPP编程基础-01第一个程序Hello World
很多课程先讲C/C++或者一些其他编程课,称之为基础课程。然后到本科高年级进行机器人专业课学习,这样时间损失非常大,效率非常低。
C++/单片机/嵌入式/ROS等这些编程基础可以合并到一门课中进行实现,这些素材已经迭代三轮以上,全部公开,需要可以参考,不需要,我就当写给自己的^_^感谢大家一直以来的帮助、支持和鼓励。
https://www.lanqiao.cn/courses/854适用于
- C++ 11 14 17 20……
- Arduino UNO DUE ESP8266 ESP32……
- ARM……
- ROS1 kinetic melodic noetic……
- ROS2 foxy humble……
素材只公开部分,主要原因是内容太多……
C++
#include<iostream>
using namespace std;main()
{cout<<"Hello World !";
}
这是一个使用C++语言编写的简单的程序。让我用中文为你详细解释一下:
首先,#include<iostream>是一个预处理指令,告诉编译器在程序运行之前要包含iostream文件。iostream文件包含了我们需要进行输入/输出操作的函数和对象。
然后,using namespace std;告诉编译器我们打算使用std命名空间。这是因为iostream文件中的函数和对象都在std命名空间中。
接下来是main()函数,这是C++程序的入口点。当你运行程序时,main函数就会被调用。
在main函数中,我们使用cout来输出一条消息,即"Hello World !"。cout是一个流对象,它表示标准输出(通常是显示器)。在这里,我们使用cout对象来发送一个字符串(即"Hello World !")到标准输出。
总的来说,这个程序的作用就是输出一条"Hello World !"的消息。

Arduino
在Arduino IDE中,使用C++编程语言,你需要使用Serial.print()或Serial.println()函数来输出到串行端口,而不是cout。此外,Arduino IDE不支持using namespace std;,因此你需要使用完整的标准库名称。
以下是修改后的代码:
#include <iostream> int main()
{ Serial.print("Hello World !"); return 0;
}注意:该代码在Arduino IDE中可能无法直接运行。Arduino IDE主要用于微控制器编程,它与标准的C++编译器有所不同。要在Arduino IDE中打印"Hello World!",你可以使用以下代码:
void setup() { Serial.begin(9600);
} void loop() { Serial.println("Hello World!"); delay(1000);
}上述代码将在打开串行连接后立即打印"Hello World!",然后等待1秒钟,并重复此过程。这是Arduino IDE中常见的串行通信方式。
M5ATOMS3基础01按键
ROS1
在ROS1中,你可以使用ROS_INFO函数来替代cout进行消息输出。下面是将代码改写为使用ROS_INFO的示例:
#include <ros/ros.h> int main(int argc, char **argv)
{ ros::init(argc, argv, "my_node"); ros::NodeHandle nh; ROS_INFO("Hello World !"); return 0;
}在上述代码中,我们包含了ros/ros.h头文件,这是ROS1中的主要头文件。然后,我们使用ros::init函数初始化ROS节点,并创建一个节点句柄(ros::NodeHandle)。接下来,我们使用ROS_INFO函数输出"Hello World !"消息。
请注意,你需要将此代码与ROS1环境一起编译和运行,以确保正确地处理ROS的相关功能和消息传递。
ROS2
能否快速独立完成???
在ROS2中,你可以使用rclcpp库中的RCL_INFO宏来替代cout进行消息输出。下面是将代码改写为使用RCL_INFO宏的示例:
#include <rclcpp/rclcpp.hpp> int main(int argc, char **argv)
{ rclcpp::init(argc, argv); rclcpp::Node::SharedPtr node = rclcpp::Node::make_shared("my_node"); rclcpp::Rate rate(1); // 设置一个频率为1Hz的定时器 while (rclcpp::ok()) { node->get_logger().info("Hello World !"); // 使用RCL_INFO宏输出消息 rate.sleep(); // 等待一段时间以保持1Hz的频率 } rclcpp::shutdown(); // 关闭ROS节点 return 0;
}
在上述代码中,我们首先包含了rclcpp/rclcpp.hpp头文件。然后,我们使用rclcpp::init函数初始化ROS节点。接下来,我们创建一个共享的节点句柄,并设置一个频率为1Hz的定时器。在循环中,我们使用RCL_INFO宏将"Hello World !"消息输出到ROS系统的日志中。然后,我们通过调用rate.sleep()来等待一段时间,以保持1Hz的频率。最后,我们使用rclcpp::shutdown()函数关闭ROS节点。
请注意,你需要将此代码与ROS2环境一起编译和运行,以确保正确地处理ROS的相关功能和消息传递。
ROS1 & Arduino
#include <ros.h>
#include <std_msgs/String.h>ros::NodeHandle nh;std_msgs::String str_msg;
ros::Publisher chatter("chatter", &str_msg);char hello[13] = "hello world!";void setup()
{nh.initNode();nh.advertise(chatter);
}void loop()
{str_msg.data = hello;chatter.publish( &str_msg );nh.spinOnce();delay(1000);
}这段代码是一个简单的ROS(Robot Operating System)节点,它使用C++编写。ROS是一个用于编写机器人软件的框架,它支持多种编程语言,包括C++、Python和Java等。
代码的主要功能是发布一个包含字符串“hello world!”的消息到名为“chatter”的ROS话题。让我们详细解释一下代码的各个部分:
#include <ros.h>: 这是包含ROS框架的头文件。#include <std_msgs/String.h>: 这是包含标准消息类型(Standard Message Types)中字符串消息的头文件。在ROS中,消息是用于在节点之间传递数据的自定义数据类型。ros::NodeHandle nh;: 创建一个ROS节点句柄对象。节点句柄是用于与ROS系统进行交互的主要接口。std_msgs::String str_msg;: 创建一个字符串消息对象,该对象将用于发布消息。ros::Publisher chatter("chatter", &str_msg);: 创建一个发布者对象,该对象将用于发布消息到名为“chatter”的话题。char hello[13] = "hello world!";: 创建一个字符数组,存储字符串“hello world!”。void setup(): 定义一个名为“setup”的函数,该函数将在节点初始化时执行一次。nh.initNode();: 初始化节点。nh.advertise(chatter);: 宣布发布者,使节点开始监听名为“chatter”的话题,并准备发布消息。void loop(): 定义一个名为“loop”的函数,该函数将在节点运行时不断执行。str_msg.data = hello;: 将字符串“hello world!”赋值给消息对象的数据字段。chatter.publish( &str_msg );: 发布消息到“chatter”话题。nh.spinOnce();: 轮询一次消息队列,以接收来自其他节点的消息。delay(1000);: 延迟1秒钟,然后重复执行循环。
总体来说,这段代码创建了一个简单的ROS节点,它不断发布包含字符串“hello world!”的消息到名为“chatter”的话题。
M5ATOMS3基础03给ROS1发一个问候(rosserial)
ROS2 & Arduino
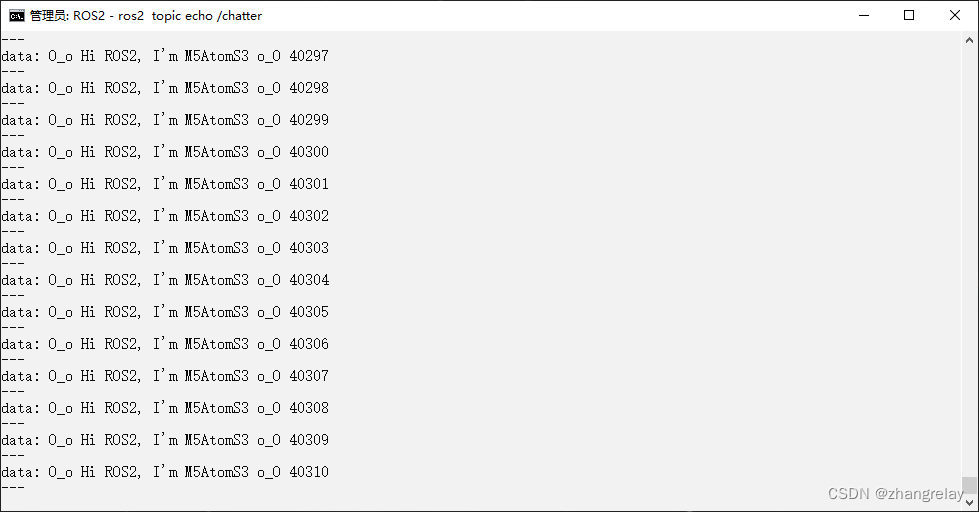
M5ATOMS3基础04给ROS2发一个问候(micro-ROS)
相关文章:
机器人CPP编程基础-01第一个程序Hello World
很多课程先讲C/C或者一些其他编程课,称之为基础课程。然后到本科高年级进行机器人专业课学习,这样时间损失非常大,效率非常低。 C/单片机/嵌入式/ROS等这些编程基础可以合并到一门课中进行实现,这些素材已经迭代三轮以上…...

前后端分离------后端创建笔记(03)前后端对接(下)
本文章转载于【SpringBootVue】全网最简单但实用的前后端分离项目实战笔记 - 前端_大菜007的博客-CSDN博客 仅用于学习和讨论,如有侵权请联系 源码:https://gitee.com/green_vegetables/x-admin-project.git 素材:https://pan.baidu.com/s/…...

Leet code1049 最后一块石头的重量II
1049 最后一块石头的重量II 【问题描述】 有一堆石头,用整数数组 stones 表示。其中 stones[i] 表示第 i 块石头的重量。 每一回合,从中选出任意两块石头,然后将它们一起粉碎。假设石头的重量分别为 x 和 y,且 x < y。那么粉…...
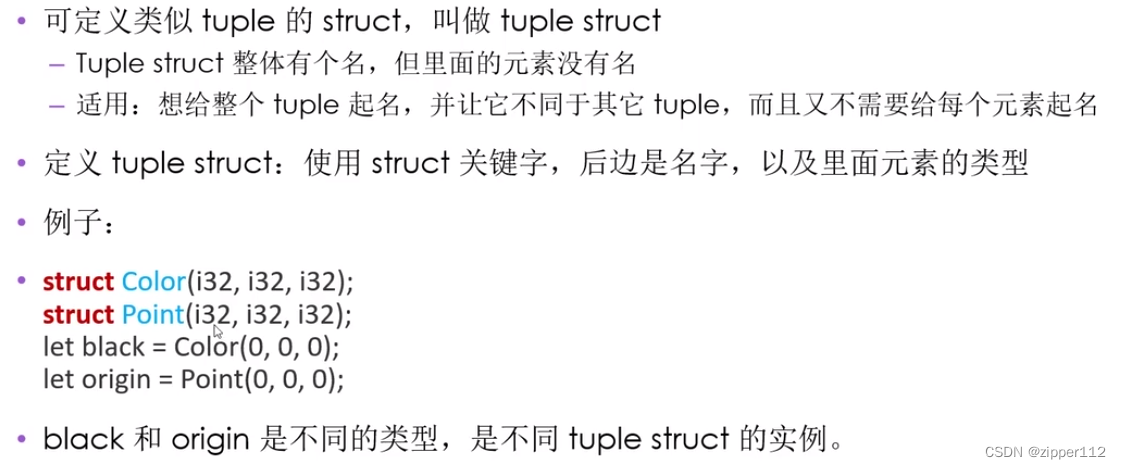
Rust语法:变量,函数,控制流,struct
文章目录 变量可变与不可变变量变量与常量变量的Shadowing标量类型整数 复合类型 函数控制流if elseloop & whilefor in structstruct的定义Tuple Structstruct的方法与函数 变量 可变与不可变变量 Rust中使用let来声明变量,但是let声明的是不可变变量&#x…...

LVS简介及LVS-DR搭建
目录 一. LVS简介: 1.简介 2. LVS工作模式: 3. LVS调度算法: 4. LVS-DR集群介绍: 二.LVS-DR搭建 1.RS配置 1)两台RS,需要下载好httpd软件并准备好配置文件 2)添加虚拟IP(vip&…...

Java基础篇--日期时间类
目录 前言 Instant(时间戳)类 LocalData(日期)类 LocalTime(时间)类 LocalDataTime(日期时间)类 Duration(时间间隔)类 Period(日期间隔)类 Clock(获取时区)类 前言 在开发中经常需要处理日期和时间,Java提供…...

Vue生命周期函数 详解
以下是Vue生命周期函数的流程图和每个周期的代码详解: 流程图: beforeCreate -> created -> beforeMount -> mounted -> beforeUpdate -> updated -> beforeDestroy -> destroyed详解: beforeCreate: 触发时…...
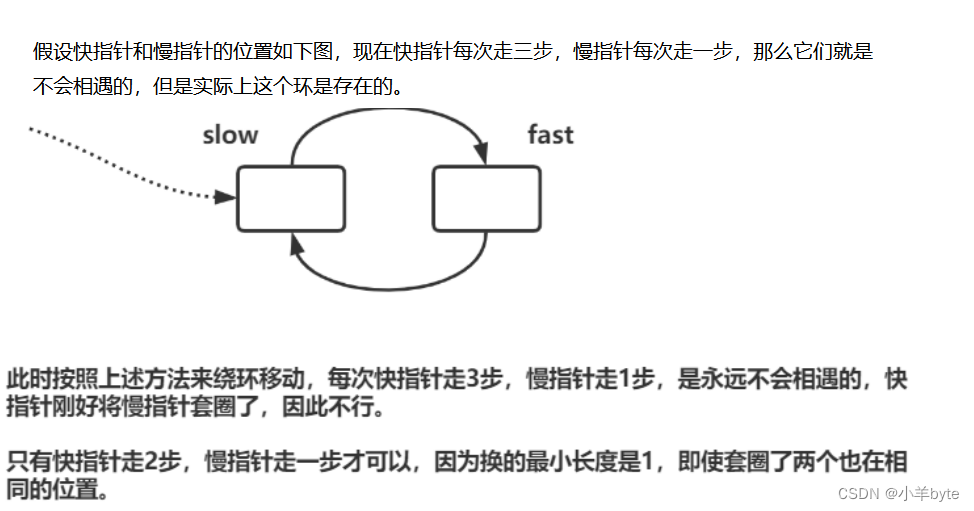
判断链表有环的证明
目录 1.问题 2.证明 3.代码实现 1.问题 给你一个链表的头节点 head ,判断链表中是否有环。 如果链表中有某个节点,可以通过连续跟踪 next 指针再次到达,则链表中存在环。 为了表示给定链表中的环,评测系统内部使用…...

百度屏蔽词有哪些?其中就有移民关键词指数被屏蔽?
我是百收网SEO,点点上面的头像,欢迎关注我哦! 今日tombkeeper消息爆料:百度指数已经屏蔽“移民”等关键词指数。 大家好,我是百收网SEO商学院的狂潮微课老师,今天我们来讲解第 12 节课关键词优化难度分析…...

代码随想录day02
977.有序数组的平方 ● 力扣题目链接 ● 给你一个按 非递减顺序 排序的整数数组 nums,返回 每个数字的平方 组成的新数组,要求也按 非递减顺序 排序。 思路 ● 暴力排序,时间复杂度O(n nlogn) ● 使用双指针,时间复杂度O(n) …...

VR时代真的到来了?
业界对苹果的期待是,打造一台真正颠覆性的,给头显设备奠定发展逻辑底座的产品,而实际上,苹果只是发布了一台更强大的头显。 大众希望苹果回答的问题是“我为什么需要一台AR或者VR产品?”,但苹果回答的是“…...

docker run 命令转化为 docker-compose 工具
工作当中需要将 docker run 转换为更方便的 docker-compose 格式,可以使用下面的工具来完成。 转换工具:https://www.composerize.com/?utm_sourceappinn.com 使用介绍:https://www.appinn.com/composerize-for-docker-compose/...
php如何对接伪原创api
在了解伪原创api的各种应用形态之后,我们继续探讨智能写作背后的核心技术。需要说明的是,智能写作和自然语言生成、自然语言理解、知识图谱、多模算法等各类人工智能算法都有紧密的关联,在百度的智能写作实践中,常根据实际需求将多…...
设计模式行为型——模板模式
目录 模板模式的定义 模板模式的实现 模板模式角色 模板模式类图 模板模式举例 模板模式代码实现 模板模式的特点 优点 缺点 使用场景 注意事项 实际应用 模板模式的定义 模板模式(Template Pattern)属于行为型设计模式,又叫模版…...

12.Eclipse导入Javaweb项目
同事复制一份他的项目给我ekp.rar (懒得从SVN上拉取代码了)放在workspace1目录下 新建一个文件夹 workspace2,Eclipse切换到workspace2工作空间 选择Import导入 选择导入的项目(这里是放到workspace1里面) 拷贝一份到workspace2里面 例子 所有不是在自己电脑上开发…...
探索自动化网页交互的魔力:学习 Selenium 之旅【超详细】
"在当今数字化的世界中,网页自动化已经成为了不可或缺的技能。想象一下,您可以通过编写代码,让浏览器自动执行各种操作,从点击按钮到填写表单,从网页抓取数据到进行自动化测试。学习 Selenium,这一功能…...

css常用样式和不常用样式
文章目录 1、hover鼠标变小手2、ul去除点3、文字溢出显示省略号(1)一行文字溢出显示省略号(2)多行文字溢出显示省略号 4、文字单词超出(1)文字单词超出换行(word-wrap)(2…...
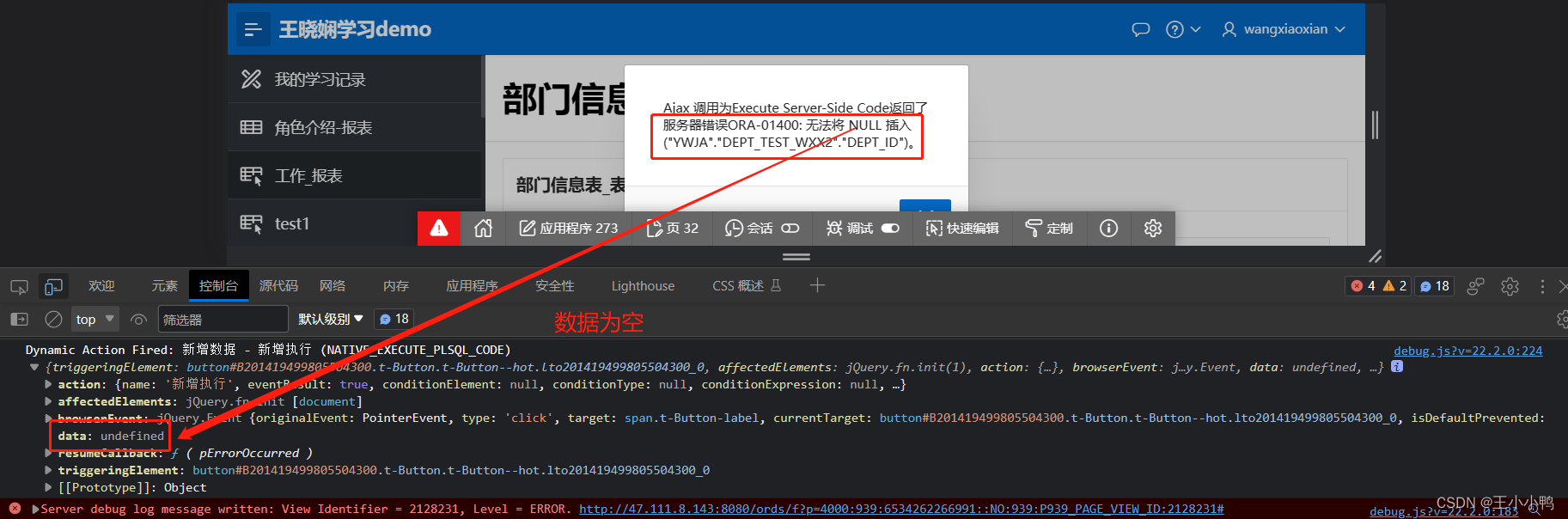
【小练习】交互式网格自定义增删改错误记录及解决(进行中)
经过之前的学习,已经能创建简单的交互式网格并设置自定义增删改按钮,但是实现上还是存在一些问题,来完善优化一下。 首先是修改,正常修改都会弹出修改框,里面是之前存储的信息,根据实际需要对其进行修改&a…...

云渲染效果不对?云渲染前的四个细节表明你的问题出在这里!
云渲染针对3D渲染行业,帮助本地电脑解决渲染慢的问题,大幅提高设计师的工作效率。但小编发现,有不少小伙伴在使用云渲染时,出现了渲染效果不对或丢失的问题,根据小伙伴们的问题和我们创意云云渲染平台给出的解决方案&a…...
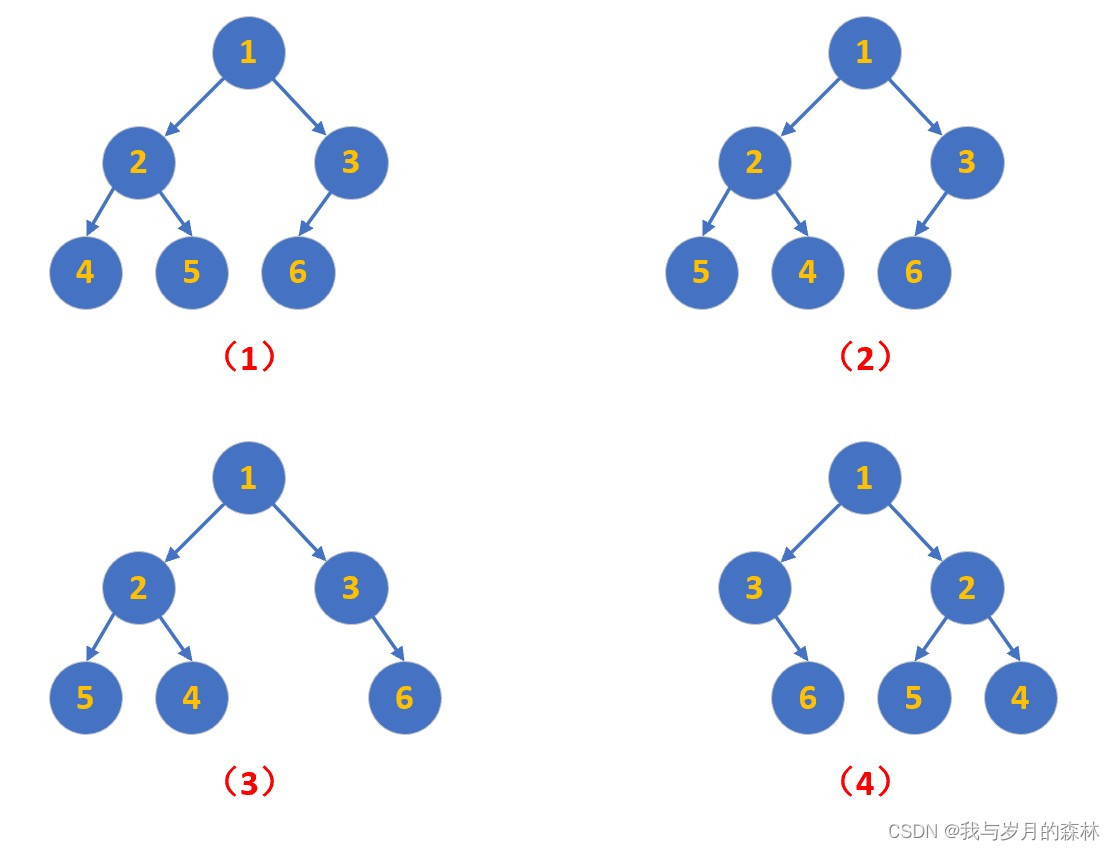
翻转二叉树
声明 该系列文章仅仅展示个人的解题思路和分析过程,并非一定是优质题解,重要的是通过分析和解决问题能让我们逐渐熟练和成长,从新手到大佬离不开一个磨练的过程,加油! 原题链接 翻转二叉树备战技术面试?…...

Claude in Excel:原生集成的AI表格协作者
1. 项目概述:这不是插件,是Excel里长出来的AI同事“Claude in Excel”这个标题刚看到时,我下意识点开几个技术社区翻了一圈,发现多数人第一反应是:“又一个AI插件?”——其实完全不是。它根本没走传统Offic…...

Jetson Orin Nano 升级jetpack5.1.2刷机过程记录
一.刷机起因 orin nano 接了个IMX477的摄像头,用 命令行DISPLAY:0.0 nvgstcapture-1.0 显示的画面有撕裂,让卖家查问题,卖家测试没有撕裂,对比环境,orin nano出厂默认的是jetpack5.1.1,卖家用的jetpack5.1.2版本,为了解决差异,要升级jetpack版本,前后搞了2天半,记录一下. 另外…...

ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程
ZjDroid命令大全:从DEX内存dump到Lua脚本注入的完整教程 【免费下载链接】ZjDroid Android app dynamic reverse tool based on Xposed framework. 项目地址: https://gitcode.com/gh_mirrors/zj/ZjDroid ZjDroid是一款基于Xposed框架的Android应用动态逆向分…...

浅聊26上半年软考架构师
2026年上半年架构师考试已然落幕,大家都考的如何?架构师共有三门考试,上午综合知识(75道选择题)案例分析,时间为8.30-12.30;下午论文,时间为14.30-16.30。下面说说我整体的备考过程。…...

别再死记硬背SMO公式了!用Python手写一个SVM分类器,带你一步步拆解SMO核心逻辑
用Python手写SVM分类器:代码驱动理解SMO算法核心在机器学习领域,支持向量机(SVM)以其优秀的分类性能和坚实的数学基础著称。然而,许多学习者在理解其核心算法——序列最小优化(SMO)时,往往被复杂的数学推导所困扰。本文将采用一种…...

智慧树自动刷课助手:3步告别手动操作的学习效率工具
智慧树自动刷课助手:3步告别手动操作的学习效率工具 【免费下载链接】zhihuishu 智慧树刷课插件,自动播放下一集、1.5倍速度、无声 项目地址: https://gitcode.com/gh_mirrors/zh/zhihuishu 还在为智慧树平台的重复刷课操作而烦恼吗?智…...
做电影评论情感分类)
告别数据饥荒:用PyTorch手把手实现原型网络(Prototypical Networks)做电影评论情感分类
告别数据饥荒:用PyTorch手把手实现原型网络做电影评论情感分类 在自然语言处理领域,情感分析一直是热门研究方向,但现实中的开发者常面临一个尴尬困境:标注数据太少。传统深度学习方法动辄需要成千上万的标注样本,而实…...

Unity动态自然系统:Forest Environment-Dynamic Nature深度解析
1. 这不是“贴图堆砌”,而是自然系统级建模:Forest Environment-Dynamic Nature 的真实定位你有没有试过在Unity里拖进几棵树、铺点草、加个天空盒,然后发现场景像一张静止的风景明信片——风不动、叶不摇、雨不落、雾不散?我做过…...

LangGraph状态机工程:构建复杂AI工作流的完整指南
传统RAG(检索增强生成)在处理简单的"单跳"问题时表现良好——“文章里提到了什么” “这个概念是什么意思”——但当问题涉及多个实体之间的关系、需要跨多个文档推理时,传统RAG就显得力不从心。GraphRAG(Graph-based R…...

ComfyUI-WD14-Tagger:3分钟实现AI智能图像标签提取,效率提升10倍
ComfyUI-WD14-Tagger:3分钟实现AI智能图像标签提取,效率提升10倍 【免费下载链接】ComfyUI-WD14-Tagger A ComfyUI extension allowing for the interrogation of booru tags from images. 项目地址: https://gitcode.com/gh_mirrors/co/ComfyUI-WD14-…...