六轴机械臂码垛货物堆叠仿真
六轴机械臂码垛货物堆叠仿真
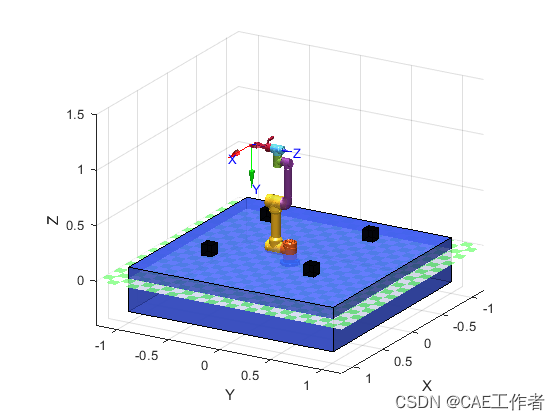
1、建立模型与仿真
clear,clc,close all
addpath(genpath('.'))
%建立模型参数如下:
L(1) = Link( 'd', 0.122, 'a' , 0 , 'alpha', pi/2,'offset',0);
L(2) = Link( 'd', 0.019 , 'a' ,0.408 , 'alpha', 0,'offset',pi/2);
L(3) = Link( 'd', 0 , 'a' , 0.3759 , 'alpha',0,'offset',0);
L(4) = Link( 'd', 0.1023, 'a' , 0 , 'alpha', -pi/2 ,'offset',pi/2);
L(5) = Link( 'd', -0.1023 , 'a' , 0 , 'alpha',pi/2,'offset',pi);
L(6) = Link( 'd', -0.25281 , 'a' , 0 , 'alpha',0,'offset',0);
robot = SerialLink(L,'name','六轴机械臂'); %建立连杆机器
% robot.display;
% robot.teach;
%%%建立工作平台和货物
q0=[0 0 0 0 0 0];%初始位置
T0=robot.fkine(q0);%正运动学得到旋转矩阵hold onaxis([-1.2 1.2 -1.2 1.2 -0.4 1.5] )%定义坐标系范围%显示机械臂初始位置robot.plot3d(q0,'tilesize',0.1,'view',[120,20],'path',...'E:\Project tasks_unfinished2\六月份\6-23 400 机械臂码垛货物堆叠\2023t5')%第一个参数是长方体的原点,第二个参数是长宽高,输入命令:
gx=0.5;gy=0.5;gz=0.2;
PlotCuboid([-1,-1,-0.3],[2,2,0.4],0.2)%定义工作台
plot3Cube([gx,gy,gz],0.1,'black');%第一个货物
plot3Cube([gx,-gy,gz],0.1,'black');%第二个货物
plot3Cube([-gx,gy,gz],0.1,'black'); %第三个货物
plot3Cube([-gx,-gy,gz],0.1,'black'); %第四个货物 %%
%搬运第二个货物
T1=transl(gx,-gy,gz)*trotx(0);%转化为旋转矩阵
q1=robot.ikunc(T1);%求逆
[qt1,qt2,qt3]=jtraj(q0,q1,30);%利用五次多项式函数轨迹规划
%显示机械臂动画robot.plot3d(qt1,'tilesize',0.1,'view',[120,20])T2=transl(gx,gy,gz+0.1)*trotx(0);%转化为旋转矩阵
q2=robot.ikunc(T2);%求逆
[qt1,qt2,qt3]=jtraj(q1,q2,30);%利用五次多项式函数轨迹规划
TR1=transl(robot.fkine(qt1));
%循环显示动画
for i=1:length(qt1)
clf
robot.plot3d(qt1(i,:),'tilesize',0.1,'view',[120,20],'delay',0)
hold on
PlotCuboid([-1,-1,-0.3],[2,2,0.4],0.2)%定义工作台
plot3Cube([gx,gy,gz],0.1,'black');%第一个货物
plot3Cube([TR1(i,1),TR1(i,2),TR1(i,3)],0.1,'black');%第二个货物
plot3Cube([-gx,gy,gz],0.1,'black'); %第三个货物
plot3Cube([-gx,-gy,gz],0.1,'black'); %第四个货物
pause(0)
end
%%
%搬运第三个货物
T3=transl(-gx,gy,gz)*trotx(0);%转化为旋转矩阵
Tc1=ctraj(T2, T3,30);%直线轨迹规划
q31=robot.ikunc(Tc1);%求逆得关节角度robot.plot3d(q31,'tilesize',0.1,'view',[120,20])T4=transl(gx,gy,gz+0.2)*trotx(0);%转化为旋转矩阵
q4=robot.ikunc(T4);%求逆得到关节角度
Tc1=ctraj(T3, T4,30);%直线轨迹规划
q41=robot.ikunc(Tc1);%求逆得关节角度
TR2=transl(Tc1);%提取空间坐标点
%循环显示动画
for i=1:length(q41)
clf
robot.plot3d(q41(i,:),'tilesize',0.1,'view',[120,20],'delay',0)
hold on
PlotCuboid([-1,-1,-0.3],[2,2,0.4],0.2)%定义工作台
plot3Cube([gx,gy,gz],0.1,'black');%第一个货物
plot3Cube([TR1(end,1),TR1(end,2),TR1(end,3)],0.1,'black');%第二个货物
plot3Cube([TR2(i,1),TR2(i,2),TR2(i,3)],0.1,'black'); %第三个货物
plot3Cube([-gx,-gy,gz],0.1,'black'); %第四个货物
pause(0)
end%%
%搬运第四个货物
T5=transl(-gx,-gy,gz)*trotx(0);%转化为旋转矩阵
q5=robot.ikunc(T5);%求逆
[qt1,qt2,qt3]=jtraj(q4,q5,30);%利用五次多项式函数轨迹规划robot.plot3d(qt1,'tilesize',0.1,'view',[120,20])T5=transl(-gx,-gy,gz)*trotx(0);%转化为旋转矩阵
q5=robot.ikunc(T5);%求逆
q51=q5;
q51(1)=q51(1)+pi/2;
T=robot.fkine(q51);
T51=[T.n(1),T.o(1),T.a(1),T.t(1);%%得到旋转矩阵T.n(2),T.o(2),T.a(2),T.t(2);T.n(3),T.o(3),T.a(3),T.t(3);0 0 0 1];
[qt1,qt2,qt3]=jtraj(q5,q51,30);%利用五次多项式函数轨迹规划
TR31=transl(robot.fkine(qt1));%得到空间坐标点T6=transl(gx,gy,gz+0.3)*trotx(0);%转化为旋转矩阵
% q6=robot.ikunc(T6);%求逆
Tc1=ctraj(T51, T6,30);%直线轨迹规划
q61=robot.ikunc(Tc1);%求逆得到关节角度
qtd=[qt1;q61];%合并关节角度
TR32=transl(Tc1);%提取空间坐标点
TR3=[TR31;TR32];%得到空间坐标点
%循环显示动画
for i=1:length(qtd)
clf
robot.plot3d(qtd(i,:),'tilesize',0.1,'view',[120,20],'delay',0)
hold on
PlotCuboid([-1,-1,-0.3],[2,2,0.4],0.2)%定义工作台
plot3Cube([gx,gy,gz],0.1,'black');%第一个货物
plot3Cube([TR1(end,1),TR1(end,2),TR1(end,3)],0.1,'black');%第二个货物
plot3Cube([TR2(end,1),TR2(end,2),TR2(end,3)],0.1,'black'); %第三个货物
plot3Cube([TR3(i,1),TR3(i,2),TR3(i,3)],0.1,'black'); %第四个货物
pause(0)
end
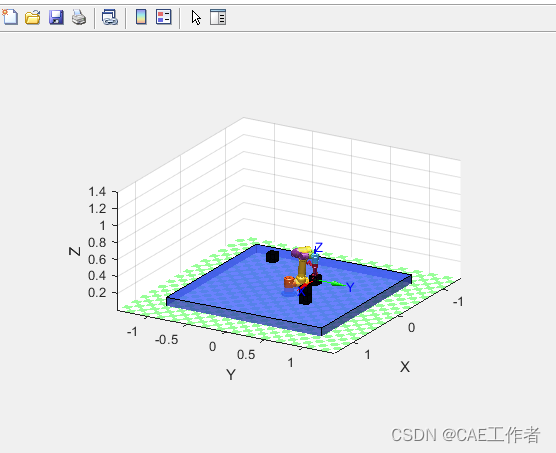
仿真视频如下:
六轴机械臂码垛货物堆叠仿真
相关文章:
六轴机械臂码垛货物堆叠仿真
六轴机械臂码垛货物堆叠仿真 1、建立模型与仿真 clear,clc,close all addpath(genpath(.)) %建立模型参数如下: L(1) Link( d, 0.122, a , 0 , alpha, pi/2,offset,0); L(2) Link( d, 0.019 , a ,0.408 , alpha, 0,offset,pi/2); L(3) Link( d, …...

text-decoration 使用
text-decoration text-decoration 用于设置文本上的装饰性线条的外观。 它是 text-decoration-line、text-decoration-style、text-decoration-color 和text-decoration-thickness的缩写。 text-decoration: underline wavy red;text-decoration-line 设置文本装饰类型 可以…...

linux shell快速入门
linux shell快速入门 0 、前置1、简单使用 0 、前置 一安装linux的虚拟环境 1、简单使用 1、新建/usr/shell目录 2、新建hello.sh 文件 3、编写脚本文件# !/bin/bashecho "hello world"查看是否具备执行权限 新增执行权限 chomd x hello.sh执行hello.sh文件 /b…...
【Spring源码】小白速通解析Spring源码,从0到1,持续更新!
Spring源码 参考资料 https://www.bilibili.com/video/BV1Tz4y1a7FM https://www.bilibili.com/video/BV1iz4y1b75q bean的生命周期 bean–>推断构造方法(默认是无参构造,或指定的构造方法)–>实例化成普通对象(相当于ne…...
Unity 鼠标实现对物体的移动、缩放、旋转
文章目录 1. 代码2. 测试场景 1. 代码 using UnityEngine;public class ObjectManipulation : MonoBehaviour {// 缩放比例限制public float MinScale 0.2f;public float MaxScale 3.0f;// 缩放速率private float scaleRate 1f;// 新尺寸private float newScale;// 射线pri…...

67Class 的基本语法
Class 的基本语法 类的由来[constructor() 方法](https://es6.ruanyifeng.com/#docs/class#constructor() 方法)类的实例实例属性的新写法取值函数(getter)和存值函数(setter)属性表达式[Class 表达式](https://es6.ruanyifeng.c…...

企业数字化转型:无形资产占比测算(2007-2021年)
在本次数据中,参考张永珅老师的做法,利用无形资产占比测算数字化转型程度。 一、数据介绍 数据名称:企业数字化转型:无形资产占比 数据年份:2007-2021年 样本数量:32960条 数据说明:包括数…...

[centos]设置主机名
1、设置 hostnamectl set-hostname 名字 2、查看是否生效 hostnamectl status 3、打开一个新链接就可以了...

华为OD真题--新学习选址--带答案
2023华为OD统一考试(AB卷)题库清单-带答案(持续更新)or2023年华为OD真题机考题库大全-带答案(持续更新) 为了解新学期学生暴涨的问题,小乐村要建立所新学校 考虑到学生上学安全问题,需要所有学生家到学校的…...
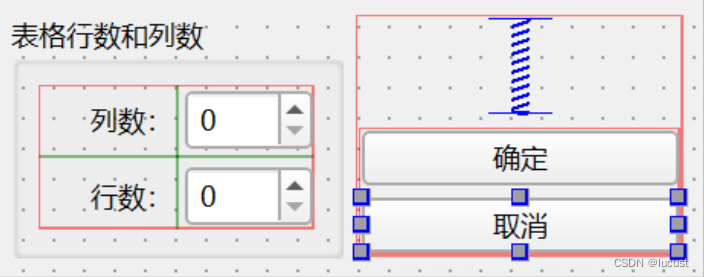
Qt自定义对话框
介绍 自定义框主要通过对现有对话框QDialog类的派生,根据需求编写成员函数、重载信号函数、槽函数,进而实现在主QWidget中点击某个按钮后,一个对话框的弹出 流程 简化创建派生类 最后点击完成即可。 自定义ui界面,编写成员函数…...
—— format() 函数的用法详解)
Python 程序设计入门(018)—— format() 函数的用法详解
Python 程序设计入门(018)—— format() 函数的用法详解 目录 Python 程序设计入门(018)—— format() 函数的用法详解一、format() 函数的基本格式二、不提供 format_spec 参数三、设置字符串的对齐方式(align&#x…...

演进式架构
演进能力是一种元特征和保护其他所有架构特征的架构封装器IEEE 的软件架构定义中的41 视图模型。它关注不同角色的不同视角,将整个系统划分成了逻辑视图、开发视图、进程视图和物理视图架构师确定了可审计性、数据、安全性、性能、合法性和伸缩性是该应用的关键架构…...

OCP China Day 2023:五大社区齐聚,加速开源开放创新与落地
8月10日,2023年开放计算中国社区技术峰会(OCP China Day 2023)在北京举行。智慧时代,计算多元化、应用多样化、技术复杂化正驱动数据中心新一轮变革,开源开放社区已成为推动数据中心持续创新的重要力量,通过…...
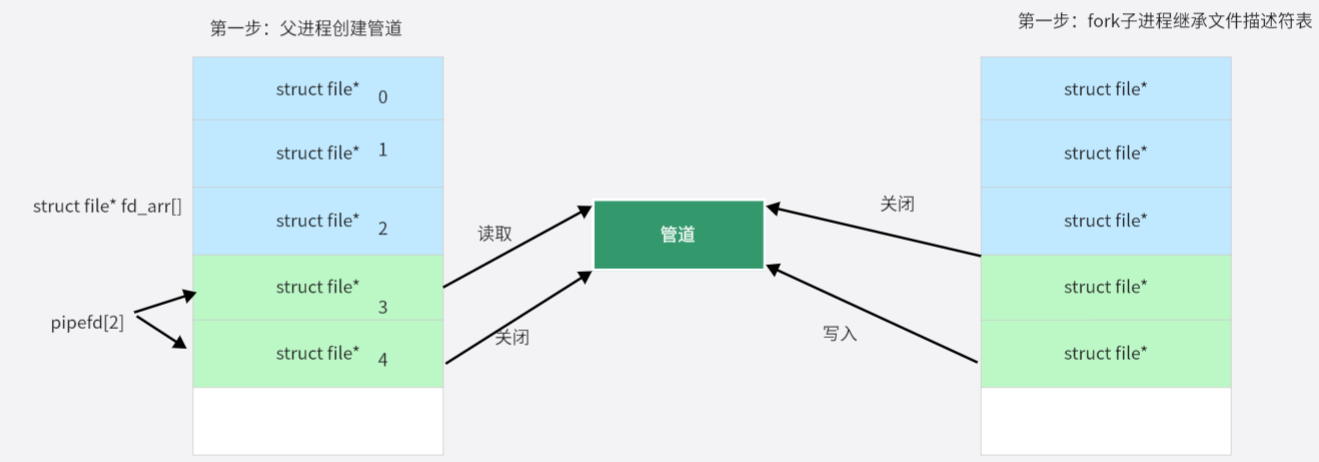
【Linux】进程间通信之管道
【Linux】进程间通信之管道 进程间通信进程间通信目的进程间通信的方式 管道(内核维护的缓冲区)匿名管道(用于父子间进程间通信)简单使用阻塞状态读写特征非阻塞状态读写特征 匿名管道特点命名管道 匿名管道与命名管道的区别 进程…...

记录一个正则表达式
正则表达式要求如下: 至少 8 个字符; 至少包含一个小写英文字母; 至少包含一个大写英文字母; 至少包含一个数字; 至少包含一个特殊字符,特殊字符为:“!#$%^&*()-” 中的一个; 不包含2个连续…...
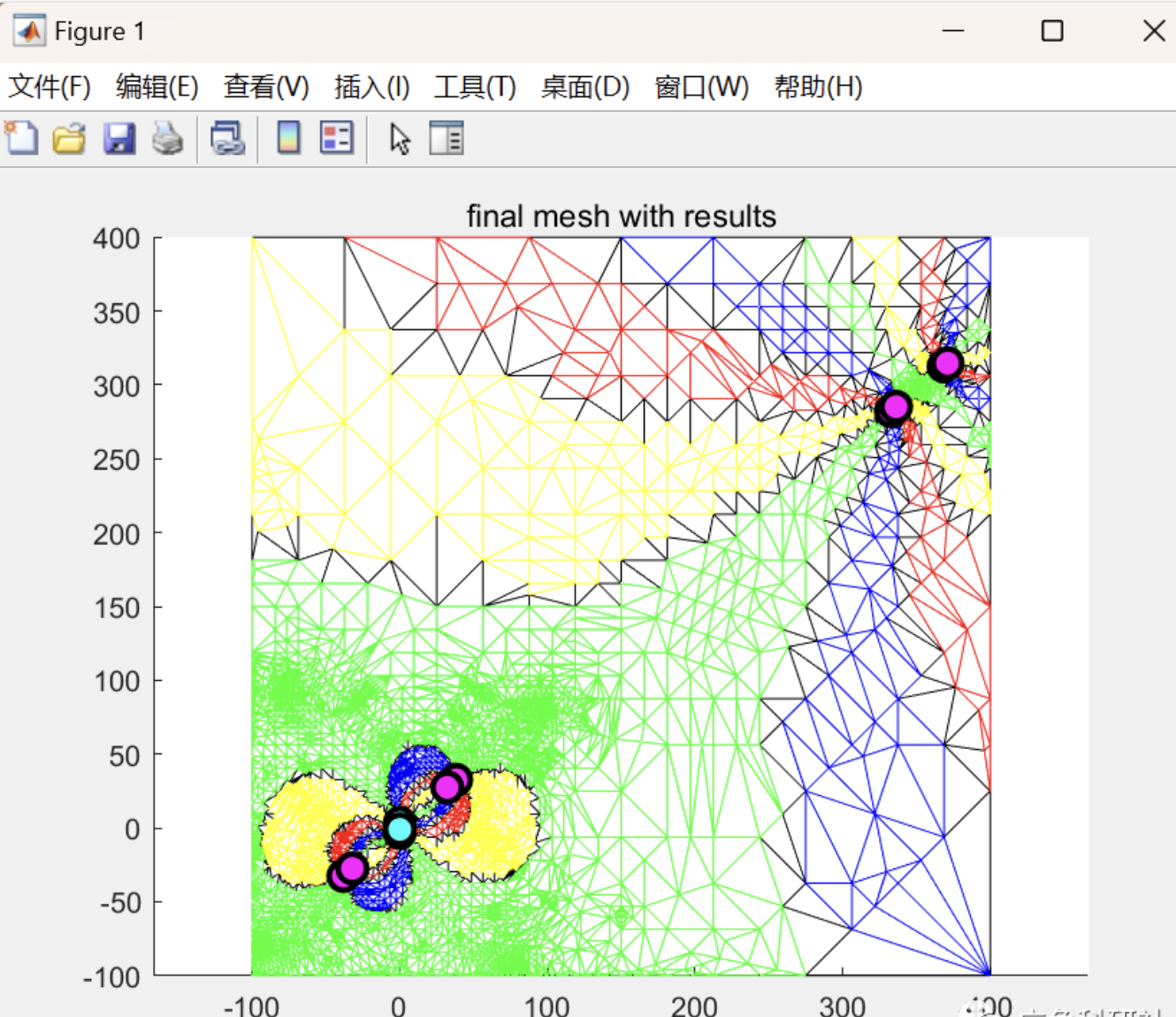
用于全局复根和极点查找算法的自适应网格生成器(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

修改Linux中SSH的端口
文章目录 修改Linux中SSH的端口Linux中默认的ssh端口关闭SELinux测试新端口 修改Linux中SSH的端口 Linux中默认的ssh端口 使用root用户操作 修改前先备份ssh_config cp /etc/ssh/sshd_config /etc/ssh/sshd_config_date "%Y%m%d%H%M%S"修改配置文件,找…...

Ansible从入门到精通【六】
大家好,我是早九晚十二,目前是做运维相关的工作。写博客是为了积累,希望大家一起进步! 我的主页:早九晚十二 专栏名称:Ansible从入门到精通 立志成为ansible大佬 ansible templates 模板(templa…...
国企的大数据岗位方向的分析
现如今大数据已无所不在,并且正被越来越广泛的被应用到历史、政治、科学、经济、商业甚至渗透到我们生活的方方面面中,获取的渠道也越来越便利。 今天我们就来聊一聊“大屏应用”,说到大屏就一定要聊到数据可视化,现如今…...
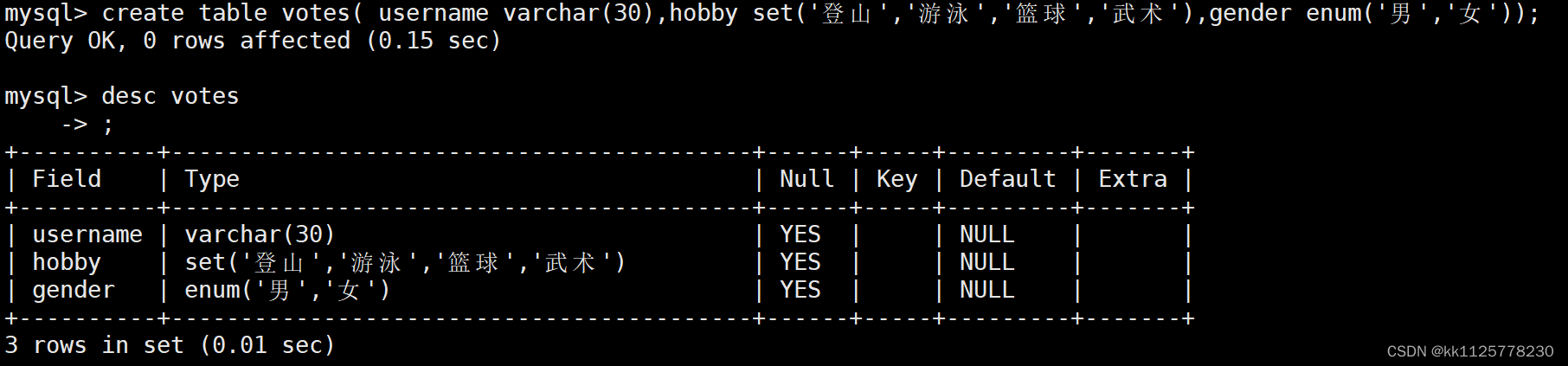
【MySQL--->数据类型】
文章目录 [TOC](文章目录) 一、数据类型分类二、整型类型三、bit(位)类型四、float类型五、decimal类型六、char和varchar类型1.char类型2.varchar3.char与varchar的区别 七、日期与时间类型八、enum和set 一、数据类型分类 二、整型类型 数值类型有数据存储上限,而且每个类型都…...

Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取
Airtest Poco实战:5分钟搞定微信小程序自动化测试环境搭建与元素抓取微信小程序作为轻量级应用的代表,已经渗透到电商、社交、工具等各个领域。随着小程序功能的日益复杂,自动化测试成为保障产品质量的重要手段。本文将带你快速搭建微信小程序…...

WTF Auto Layout? 实战:10个常见约束冲突案例解析与解决方案
WTF Auto Layout? 实战:10个常见约束冲突案例解析与解决方案 【免费下载链接】wtfautolayout The source code for Why The Failure, Auto Layout? 项目地址: https://gitcode.com/gh_mirrors/wt/wtfautolayout 在iOS开发中,Auto Layout是构建灵…...

ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库
ComfyUI-Manager完整指南:如何轻松管理你的AI工作流扩展库 【免费下载链接】ComfyUI-Manager ComfyUI-Manager is an extension designed to enhance the usability of ComfyUI. It offers management functions to install, remove, disable, and enable various c…...

利用FTDI芯片MPSSE模式构建Arduino兼容开发环境
1. 项目概述:当FTDI芯片遇上Arduino生态如果你手头有一些闲置的FTDI USB转串口模块,比如常见的FT232R、FT2232H,或者像我一样,从某个旧设备上拆下来一块FT2232C的老古董,除了用来给单片机烧录程序或者做串口调试&#…...

告别手动预约:i茅台自动预约系统5分钟部署指南
告别手动预约:i茅台自动预约系统5分钟部署指南 【免费下载链接】campus-imaotai i茅台app自动预约,每日自动预约,支持docker一键部署(本项目不提供成品,使用的是已淘汰的算法) 项目地址: https://gitcode…...

Arduino ADC自检:用RC电路诊断模数转换器故障
1. 项目概述:当你的体重秤开始“说谎”你有没有遇到过这样的情况:站上家里的电子体重秤,屏幕上跳出来的数字让你瞬间怀疑人生?要么是轻得离谱,要么是重得吓人,更诡异的是,它可能只在两个固定的、…...

手机也能玩转无人机仿真:用安卓QGC App连接同一WiFi下的PX4 JMAVSim模拟器
手机也能玩转无人机仿真:用安卓QGC App连接同一WiFi下的PX4 JMAVSim模拟器 无人机开发者和爱好者们,是否曾想过用手机就能完成整个无人机仿真测试流程?告别笨重的电脑束缚,只需一部安卓设备,就能在沙发上调试飞控算法。…...
)
Lovable内部工具开发方法论(从需求黑洞到用户自发推广的完整闭环)
更多请点击: https://kaifayun.com 第一章:Lovable内部工具开发方法论(从需求黑洞到用户自发推广的完整闭环) Lovable 方法论的核心不是交付功能,而是培育“工具依赖感”——当一线工程师在凌晨三点调试线上问题时&am…...

如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南
如何让旧款Mac运行最新系统:OpenCore Legacy Patcher完整指南 【免费下载链接】OpenCore-Legacy-Patcher Experience macOS just like before 项目地址: https://gitcode.com/GitHub_Trending/op/OpenCore-Legacy-Patcher 想让你的老旧Mac设备重新焕发活力&a…...
)
【小白快速上手】 OpenClaw 安装部署全流程(含安装包)
OpenClaw 一键安装包|一键部署,告别复杂环境配置 适配系统:Windows10/11 64 位当前版本:v2.7.5(虾壳云版)核心优势:全程可视化操作,无需命令行、无需手动配置 Python/Node.js&#…...