Opencv-C++笔记 (17) : 模板匹配
文章目录
- 1--概念
- 2-- 方法
- 3 结果
- 3.1 ROI区域的获取使用
- 自适应目标匹配
1–概念
opencv 提供了一个专门用于模板匹配的函数 cv::matchTemplate();其调用方式如下:
void cv::matchTemplate(cv::InputArray image, // 用于搜索的输入图像, 8U 或 32F, 大小 W-Hcv::InputArray templ, // 用于匹配的模板,和image类型相同, 大小 w-hcv::OutputArray result, // 匹配结果图像, 类型 32F, 大小 (W-w+1)-(H-h+1)int method // 用于比较的方法 );
2-- 方法

3 结果
模板匹配函数cv::MatchTemplate一次计算模板与待测图像的相似度,并将结果存入映 图像result中,也就是result图像中的每一个点的值代表一次相似度比较结果;其中,模
通过在待检测的图像上从左到右,从上到下滑动,每到达一个像素点,就会以这个像素点
左上角顶点从原图像中截取一个与模板大小一样的图像进行像素比较的运算,模板在滑动
过程中,将模板和当前截取的图像的比较计算结果储存在result矩阵中,result的大小为(W
w+1,H-h+1),在result中的每个位置(x,y)的值都表示以这个点为左上角顶点截取的图像
模板像素计算后的计算结果;模板在待测图像上每次在横向或者纵向上每次移动一个像素点
然后进行一次比较,所以横向比较W-w+1次,纵向比较H-h+1次,最终得到一个(W w+1)x(H-h+1)的result矩阵;
3.1 ROI区域的获取使用
cv::MinMaxLoc(result,&min_val,&max_val,&min_loco,&max_loc,NULL);从result中提取最大值(相似度最高)以及最大值的位置(即在result中该最大值max_val的坐标位置max_loc,即模板滑行时左上角的坐标,类似于图中的坐标(x,y);
由此得到rect=cvRect(max_loc.x,max_loc.y,tmp->width,tmp->height);其中rect表示最佳的匹配的矩形区域;minVal参数表示返回的最小值,如果不需要,则使用NULL。maxVal参数表示返回的最大值,如果不需要,则使用NULL。minLoc参数表示返回的最小位置的指针(在2D情况下); 如果不需要,则使用NULL。maxLoc参数表示返回的最大位置的指针(在2D情况下); 如果不需要,则使用NULL。
3.2、 代码实现
单目标匹配
#include <opencv2/opencv.hpp>
#include <iostream>
#include <stdio.h>using namespace std;
using namespace cv;int main()
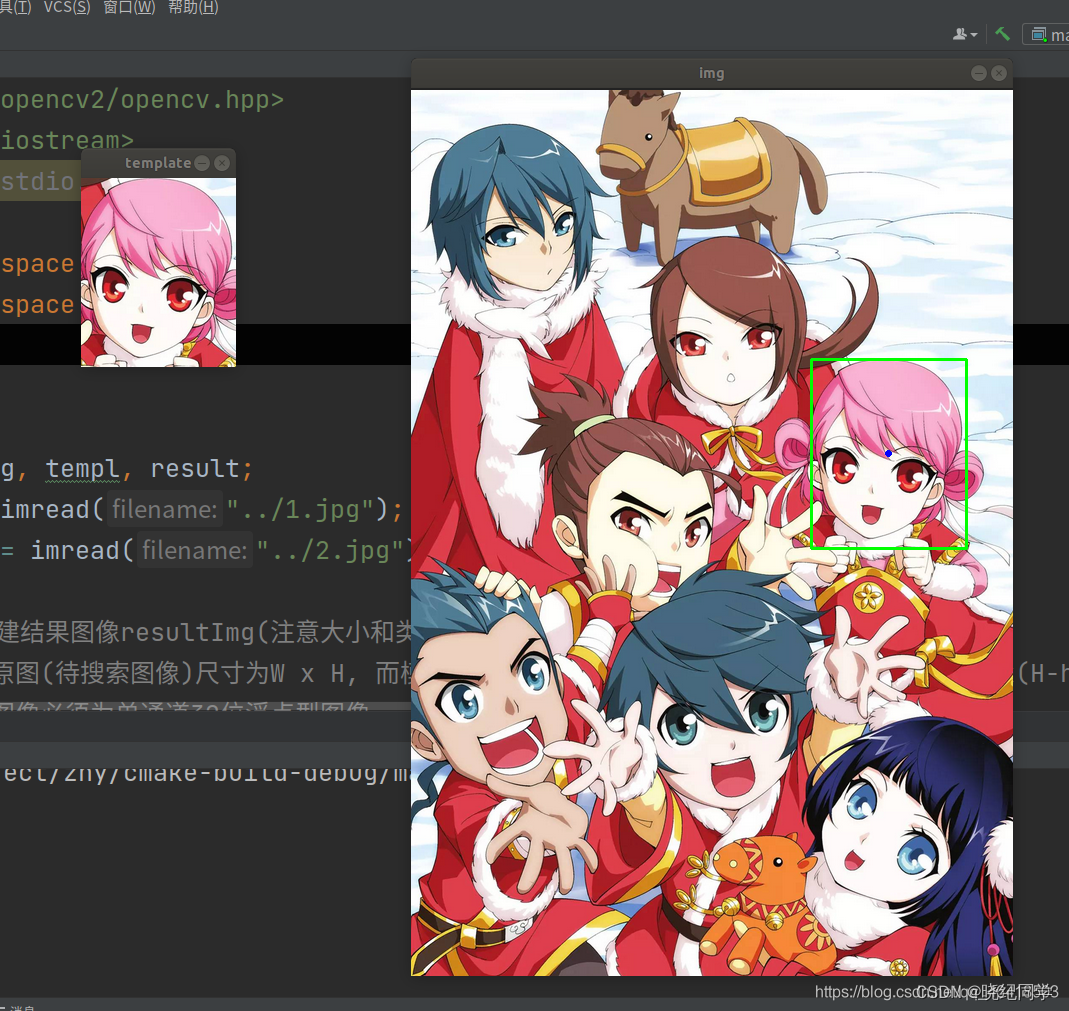
{Mat img, templ, result; //img为待测图 templ是目标图片 result是结构图img = imread("../1.jpg");templ = imread("../2.jpg");//1.构建结果图像resultImg(注意大小和类型)//如果原图(待搜索图像)尺寸为W x H, 而模版尺寸为 w x h, 则结果图像尺寸一定是(W-w+1)x(H-h+1)//结果图像必须为单通道32位浮点型图像int result_cols = img.cols - templ.cols + 1; //result的尺寸大小int result_rows = img.rows - templ.rows + 1;result.create(result_cols, result_rows, CV_32FC1);//2.模版匹配//这里我们使用的匹配算法是标准平方差匹配 method=CV_TM_SQDIFF_NORMED,数值越小匹配度越好matchTemplate(img, templ, result, CV_TM_SQDIFF_NORMED);//3.正则化(归一化到0-1)normalize(result, result, 0, 1, NORM_MINMAX, -1, Mat());//4.找出resultImg中的最大值及其位置double minVal = -1;double maxVal;Point minLoc;Point maxLoc;Point matchLoc;cout << "匹配度:" << minVal << endl;// 定位极值的函数minMaxLoc(result, &minVal, &maxVal, &minLoc, &maxLoc, Mat());cout << "匹配度:" << minVal << endl;cout << "minPosition: " << minLoc << endl;cout << "maxPosition: " << maxLoc << endl;matchLoc = minLoc; //5.根据resultImg中的最大值位置在源图上画出矩形和中心点Point center = Point(minLoc.x + templ.cols / 2, minLoc.y + templ.rows / 2);rectangle(img, matchLoc, Point(matchLoc.x + templ.cols, matchLoc.y + templ.rows), Scalar(0, 255, 0), 2, 8, 0);circle(img, center, 2, Scalar(255, 0, 0), 2);imshow("img", img);imshow("template", templ);waitKey(0);return 0;
}
实时单目标识别
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace std;
using namespace cv;int main()
{//1.定义VideoCapture类对象video,打开摄像头VideoCapture video(0);//1.1.判断是否打开if (!video.isOpened()){cout << "video open error!" << endl;return 0;}//2.循环读取视频的每一帧,对每一帧进行模版匹配while (1){//2.1.读取帧Mat frame;video >> frame;//2.2.对帧进行异常检测if (frame.empty()){cout << "frame empty" << endl;break;}//2.3.对帧进行模版匹配Mat tempImg = imread("../1.jpg", CV_LOAD_IMAGE_COLOR);cout << "Size of template: " << tempImg.size() << endl;//2.3.1.构建结果图像resultImg(注意大小和类型)//如果原图(待搜索图像)尺寸为W x H, 而模版尺寸为 w x h, 则结果图像尺寸一定是(W-w+1)x(H-h+1)//结果图像必须为单通道32位浮点型图像int width = frame.cols - tempImg.cols + 1;int height = frame.rows - tempImg.rows + 1;Mat resultImg(Size(width, height), CV_32FC1);//2.3.2.模版匹配matchTemplate(frame, tempImg, resultImg, CV_TM_CCOEFF_NORMED);imshow("result", resultImg);//2.3.3.正则化(归一化到0-1)normalize(resultImg, resultImg, 0, 1, NORM_MINMAX, -1);//2.3.4.找出resultImg中的最大值及其位置double minValue = 0;double maxValue = 0;Point minPosition;Point maxPosition;minMaxLoc(resultImg, &minValue, &maxValue, &minPosition, &maxPosition);cout << "minValue: " << minValue << endl;cout << "maxValue: " << maxValue << endl;cout << "minPosition: " << minPosition << endl;cout << "maxPosition: " << maxPosition << endl;//2.3.5.根据resultImg中的最大值位置在源图上画出矩形rectangle(frame, maxPosition, Point(maxPosition.x + tempImg.cols, maxPosition.y + tempImg.rows), Scalar(0, 255, 0), 1, 8);imshow("srcImg", frame);imshow("template", tempImg);if (waitKey(10) == 27){cout << "ESC退出" << endl;break;};}return 0;
}
多目标模板匹配
#include <opencv2/opencv.hpp>
#include <iostream>
#include <math.h>using namespace std;
using namespace cv;Point getNextMinLoc(Mat &result, Point minLoc, int maxValue, int templatW, int templatH);int main()
{Mat src = imread("../1.jpg");Mat srcCopy = src.clone();Mat temp = imread("../2.jpg");Mat result;if (src.empty() || temp.empty()){cout << "打开图片失败" << endl;return 0;}vector<Mat> templat;vector<float> minV;vector<Point> minL;int srcW, srcH, templatW, templatH, resultH, resultW;srcW = src.cols;srcH = src.rows;templat.push_back(temp);double minValue, maxValue;Point minLoc, maxLoc;for (int i=0;i<10;i++){cout << i << ": ";templatW = templat[i].cols;templatH = templat[i].rows;if (srcW < templatW || srcH < templatH){cout << "模板不能比原图大" << endl;return 0;}resultW = srcW - templatW + 1;resultH = srcH - templatH + 1;result.create(Size(resultW, resultH), CV_32FC1);matchTemplate(src, templat[i], result, CV_TM_SQDIFF_NORMED);minMaxLoc(result, &minValue, &maxValue, &minLoc, &maxLoc);cout << "min1: " << minValue << endl;if (minValue<=0.070055){rectangle(srcCopy, minLoc, Point(minLoc.x + templatW, minLoc.y + templatH), Scalar(0, 0, 255), 2, 8, 0);Point new_minLoc;new_minLoc = getNextMinLoc(result, minLoc, maxValue, templatW, templatH);float *data = result.ptr<float>(new_minLoc.y);cout << "min2: " << data[new_minLoc.x] << " ";if (data[new_minLoc.x]<=0.5){cout << "进这个函数了:" << i << ":" << new_minLoc.x;cout << " " << new_minLoc.y;rectangle(srcCopy, new_minLoc, Point(new_minLoc.x + templatW, new_minLoc.y + templatH),Scalar(0, 255, 0), 2, 8, 0);new_minLoc = getNextMinLoc(result, new_minLoc, maxValue, templatW, templatH);}float *data1 = result.ptr<float>(new_minLoc.y);cout << "min3: " << data1[new_minLoc.x] << " " << endl;if (data1[new_minLoc.x] <= 0.4){rectangle(srcCopy, new_minLoc, Point(new_minLoc.x + templatW, new_minLoc.y + templatH),Scalar(255, 0, 0), 2, 8, 0);}}cout << "#" << endl;Mat temp_templat;resize(templat[i], temp_templat, Size(templat[i].cols / 1.1, templat[i].rows / 1.1));templat.push_back(temp_templat);}imshow("结果", srcCopy);waitKey(0);return 0;
}Point getNextMinLoc(Mat &result, Point minLoc, int maxValue, int templatW, int templatH)
{//imshow("result", result);//cout << "maxvalue: " << maxValue << endl;int startX = minLoc.x - templatW / 3;int startY = minLoc.y - templatH / 3;int endX = minLoc.x + templatW / 3;int endY = minLoc.y + templatH / 3;if (startX < 0 || startY < 0){startX = 0;startY = 0;}if (endX > result.cols - 1 || endY > result.rows - 1){endX = result.cols - 1;endY = result.rows - 1;}int y, x;for (y = startY; y < endY; y++){for (x = startX; x < endX; x++){float *data = result.ptr<float>(y);data[x] = maxValue;}}double new_minValue, new_maxValue;Point new_minLoc, new_maxLoc;minMaxLoc(result, &new_minValue, &new_maxValue, &new_minLoc, &new_maxLoc);//imshow("result_end", result);return new_minLoc;
}

通过得到的结果我们发现我们的模板匹配好像匹配区域与模板的尺寸是一致的,由此很容易产生误差,或是得到并不理想的区域,而在实际生活中,由于待测图像与摄像头之间的距离的变换,模板的大小因素的影响,若是想要得到较好的匹配结果,则需要我们实现自适应尺寸的模板匹配;
由此,我们开始进行自适应尺寸的模板匹配,载入的模板图像,另其进入循环,每次循环缩放一定的比例,在进行模板匹配,最终我们得到了不同比例下的ROI区域,对所有的ROI区域与我们的模板图片进行相似度的比较,选出相似度最高的匹配图像,同时获得最佳的匹配比例;
自适应目标匹配
代码流程:
1,载入待测图像与模板;2,将模板图像等比例放大或缩小3,没改变一次进行一次模板匹配4,得到匹配区域的图片5,将得到的ROI图片与原始模板进行相似性比较6,筛选出相似性最好的ROI区域7,在待测图片上进行框选8,输出图片
#include <opencv2/opencv.hpp>
#include <iostream>
#include <stdio.h>using namespace std;
using namespace cv;int pHash(Mat matSrc1, Mat matSrc2)
//int main()
{Mat matDst1, matDst2;// Mat matSrc1 = imread("../1.jpg");
// Mat matSrc2 = imread("../3.jpg");cv::resize(matSrc1, matDst1, cv::Size(32, 32), 0, 0, cv::INTER_CUBIC);cv::resize(matSrc2, matDst2, cv::Size(32, 32), 0, 0, cv::INTER_CUBIC);cv::cvtColor(matDst1, matDst1, CV_BGR2GRAY);cv::cvtColor(matDst2, matDst2, CV_BGR2GRAY);matDst1.convertTo(matDst1, CV_32F);matDst2.convertTo(matDst2, CV_32F);dct(matDst1, matDst1);dct(matDst2, matDst2);int iAvg1 = 0, iAvg2 = 0;int arr1[64], arr2[64];for (int i = 0; i < 8; i++){uchar* data1 = matDst1.ptr<uchar>(i);uchar* data2 = matDst2.ptr<uchar>(i);int tmp = i * 8;for (int j = 0; j < 8; j++){int tmp1 = tmp + j;arr1[tmp1] = data1[j];arr2[tmp1] = data2[j];iAvg1 += arr1[tmp1];iAvg2 += arr2[tmp1];}}iAvg1 /= 64;iAvg2 /= 64;for (int i = 0; i < 64; i++){arr1[i] = (arr1[i] >= iAvg1) ? 1 : 0;arr2[i] = (arr2[i] >= iAvg2) ? 1 : 0;}int iDiffNum = 0;for (int i = 0; i < 64; i++)if (arr1[i] != arr2[i])++iDiffNum;
// cout<<iDiffNum<<endl;return iDiffNum;
}//int main()
//{
// Mat img,templ,result;
// img = imread("../1.jpg");
// templ = imread("../2.jpg");
//
// int result_cols = img.cols - templ.cols + 1;
// int result_rows = img.rows - templ.rows + 1;
//
// result.create(result_cols,result_rows,CV_32FC1);
// matchTemplate(img, templ, result, CV_TM_SQDIFF_NORMED);
//
// Point minLoc;
// Point maxLoc;
// double minVal = -1;
// double maxVal;
//
// minMaxLoc(result,&minVal,&maxVal,&minLoc,&maxLoc,Mat());
// cout<<"minLoc.x:"<<minLoc.x<<endl;
// cout<<"minLoc.y:"<<minLoc.y<<endl;
// cout<<"result_cols:"<<result_cols<<endl;
//
// int ROI_rows =templ.rows - 0.05*templ.rows;
// int ROI_cols =templ.cols - 0.05 *templ.cols;
//
// Rect img_ROI = Rect(minLoc.x, minLoc.y,ROI_rows,ROI_cols);
//
// Mat ROI = img(img_ROI);
// pHash(ROI,templ);
//
//}int main()
{//加载图片Mat src_img,temp_img,result_img;src_img = imread("../1.jpg");temp_img = imread("../2.jpg");imshow("src_img",src_img);imshow("temp_img",temp_img);//构建结果图像,结果图像必须是单通道32位浮点型图像int result_cols = src_img.cols - temp_img.cols + 1; //result的尺寸大小int result_rows = src_img.rows - temp_img.rows + 1;result_img.create(result_cols, result_rows, CV_32FC1);int n = 0;//循环缩放模板图片for(int i = 0; i <10; i++){cout<<i<<endl;Mat temp_imgc = temp_img.clone();int temp_imgc_col = temp_img.cols - i * 0.05 * temp_img.cols;int temp_imgc_row = temp_img.rows - i * 0.05 * temp_img.rows;resize(temp_imgc,temp_imgc,Size(temp_imgc_col,temp_imgc_row));//进行模板匹配matchTemplate(src_img,temp_imgc,result_img,0);double minVal = -1;double maxVal;Point minLoc;Point maxLoc;Point matchLoc;minMaxLoc(result_img, &minVal, &maxVal, &minLoc, &maxLoc, Mat());Rect ROI = Rect(minLoc.x,minLoc.y,temp_imgc_row,temp_imgc_col);Mat img_show = src_img.clone();matchLoc = minLoc;//5.根据resultImg中的最大值位置在源图上画出矩形和中心点Point center = Point(minLoc.x + temp_imgc.cols / 2, minLoc.y + temp_imgc.rows / 2);rectangle(img_show, matchLoc, Point(matchLoc.x + temp_imgc.cols, matchLoc.y + temp_imgc.rows), Scalar(0, 255, 0), 1, 8, 0);// imshow("result",img_show);
// waitKey(0);//获取匹配得到区域Rect img_ROI = Rect(matchLoc,Point(matchLoc.x + temp_imgc.cols, matchLoc.y + temp_imgc.rows));Mat img = src_img.clone();Mat ROI_img = img(img_ROI);// imshow("ROI",ROI_img);
// waitKey(0);//进行相似度比较if(pHash(ROI_img,temp_img) < 20){n = pHash(ROI_img,temp_img);cout<<"n="<<n<<endl;imshow("zhy", img_show);waitKey(0);}// //获取模板匹配得到的区域
// double minVal;
// double maxVal;
// Point minLoc;
// Point maxLoc;
// minMaxLoc(result_img,&minVal,&maxVal,&minLoc,&maxLoc,Mat()); //找矩阵中最小位置点的坐标
// //画出ROI区域的矩形框
// Rect ROI = Rect(minLoc.x,minLoc.y,temp_imgc_row,temp_imgc_col);
//
// Mat result_img_ROI = result_img(ROI);
// cout<<i<<endl;
// imshow("show",result_img_ROI);
// waitKey(0);}
}

相关文章:
Opencv-C++笔记 (17) : 模板匹配
文章目录 1--概念2-- 方法3 结果3.1 ROI区域的获取使用自适应目标匹配 1–概念 opencv 提供了一个专门用于模板匹配的函数 cv::matchTemplate();其调用方式如下: void cv::matchTemplate(cv::InputArray image, // 用于搜索的输入图像, 8U 或 32F, 大小 W-Hcv::Inpu…...
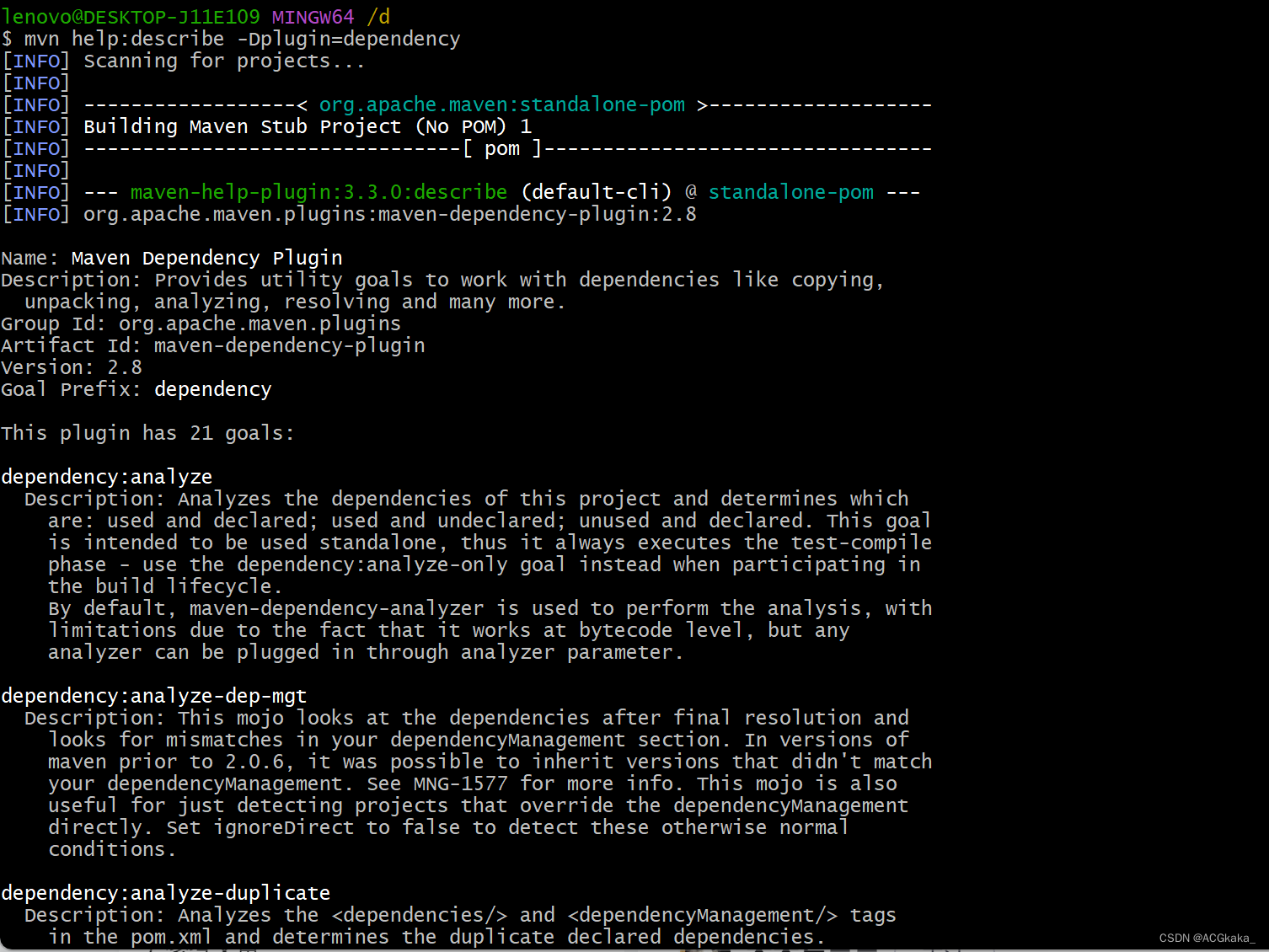
Maven(四)常用命令大全
目录 一、mvn 命令参数二、mvn 插件命令1.介绍2.查看插件的使用文档3.常用的插件命令 官网地址: https://maven.apache.org/官方插件清单: https://maven.apache.org/plugins/index.html Maven 是一个强大的构建工具,它提供了许多命令来进行项…...
13.3 目标检测和边界框
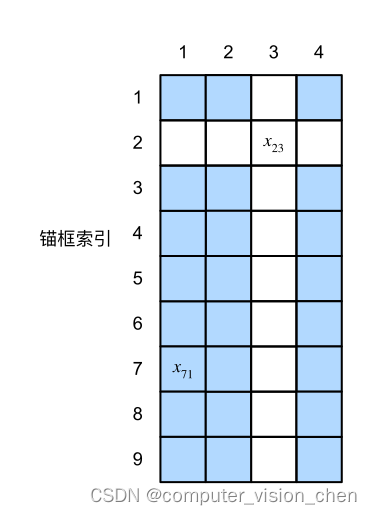
锚框的计算公式 假设原图的高为H,宽为W 详细公式推导 以同一个像素点为锚框,可以生成 (n个缩放 m个宽高比 -1 )个锚框 锚框的作用: 不用直接去预测真实框的四个坐标,而是: 1.先生成多个锚框。 2.预测每个锚框里是否含有要预测…...
)
TCP/IP网络江湖初探:物理层的奥秘与传承(物理层上篇-基础与本质)
〇、引言 在这个数字时代,计算机网络如同广袤的江湖,数据在其中畅游,信息传递成为了生活的常态。然而,在这个充满虚拟奇观的网络江湖中,隐藏着一个不容忽视的存在,那就是物理层,这个江湖的基石。就如同江湖中的土地一样,物理层作为计算机网络的基础,承载着数据的最初转…...
计算机视觉五大核心研究任务全解:分类识别、检测分割、人体分析、三维视觉、视频分析
目录 一、引言1.1 计算机视觉的定义1.1.1 核心技术1.1.2 应用场景 1.2 历史背景及发展1.2.1 1960s-1980s: 初期阶段1.2.2 1990s-2000s: 机器学习时代1.2.3 2010s-现在: 深度学习的革命 1.3 应用领域概览1.3.1 工业自动化1.3.2 医疗图像分析1.3.3 自动驾驶1.3.4 虚拟现实与增强现…...

linux -- centos -- cmake 留坑
安装Cmake 在Linux一个目录下: touch poj.cpp touch CMakeLists.txtpoj.cpp的内容:随便输出一点东西啦 CMakeLists.txt的内容: cmake_minimum_required(VERSION 3.6) project(Test) add_executable(Test test.cpp)cmake_minimum_required:c…...

【100天精通python】Day33:使用python操作数据库_SQLite数据库的使用与实战
目录 专栏导读 1 SQLite 简介 2 SQLite数据库安装及使用 2.1 检查 SQLite 支持 2.2 创建数据库文件 2.2.1 使用 Python 创建数据库文件: 2.2.2 使用命令行创建数据库文件: 2.3 连接到 SQLite 数据库: 3 SQLite 中常用的SQL语句…...
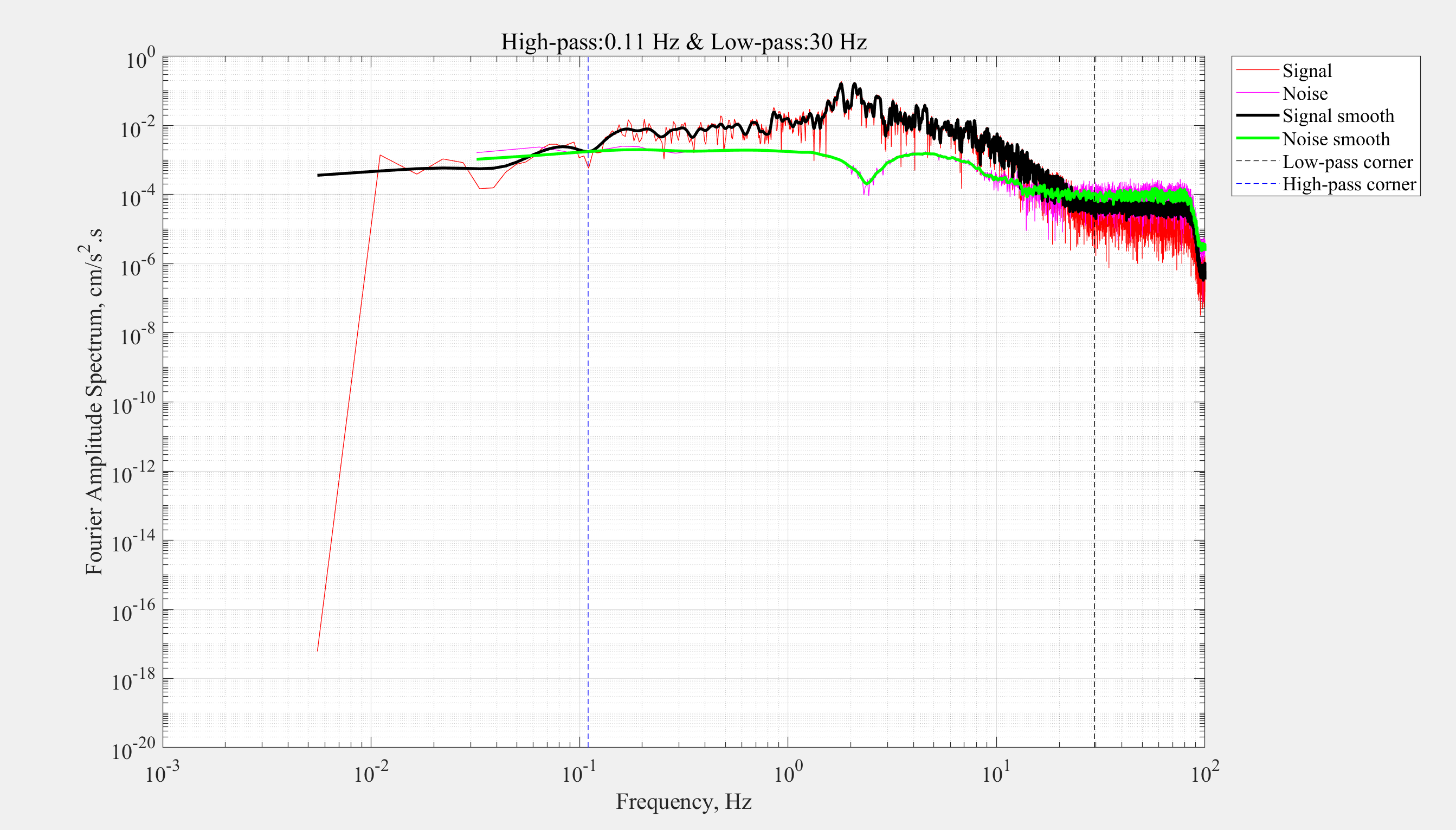
通过将信号频谱与噪声频谱进行比较,自动检测适当的带通滤波器转折频率研究(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
【Sklearn】基于多层感知器算法的数据分类预测(Excel可直接替换数据)
【Sklearn】基于多层感知器算法的数据分类预测(Excel可直接替换数据) 1.模型原理2.模型参数3.文件结构4.Excel数据5.下载地址6.完整代码7.运行结果1.模型原理 多层感知器(Multilayer Perceptron,MLP)是一种前馈神经网络,用于解决分类和回归问题。它包含输入层、若干个隐…...
在 Windows 中恢复数据的 5 种方法
发生数据丢失的原因有多种。无论是因为文件被意外删除、文件系统或操作系统损坏,还是由于软件或硬件级别的存储故障,数据都会在您最意想不到的时候丢失。今天我们重点介绍五种数据恢复方法,以应对意外情况的发生。 1.从另一台机器启动硬盘 如…...

配置使用Gitee账号认证登录Grafana
三方社会化身份源 集成gitee第三方登录 第三方登录的原理 所谓第三方登录,实质就是 OAuth 授权。用户想要登录 A 网站,A 网站让用户提供第三方网站的数据,证明自己的身份。获取第三方网站的身份数据,就需要 OAuth 授权。 举例来…...

使用 Flask 部署 Next.js
原文 使用 Flask 部署 Next.js Flask 和 Next.js 是两个独特的开源 Web 框架,分别构建在 Python 和 JavaScript 编程语言之上。 您可以在没有 Next.js 的情况下构建 Flask 应用程序,也可以在没有 Flask 的情况下构建 Next.js 应用程序。但是࿰…...

网络安全--iptables
总结: iptables 的关键概念和功能: 规则(Rules): iptables 使用规则来定义特定的操作,例如允许或拒绝特定类型的网络流量。每条规则都由条件和操作组成。条件可以是源 IP 地址、目标 IP 地址、端口号等&a…...

【猿灰灰赠书活动 - 02期】- 【Java从入门到精通2023年7月最新(第7版)】
说明:博文为大家争取福利,与清华大学出版社合作进行送书活动 图书:《Java从入门到精通》 一、好书推荐 图书介绍 Java入门经典,95万Java程序员的入行选择。配备升级版Java开发资源库,在线大咖课在线答疑,学…...

Springboot 设置统一的请求返回格式
现在开发过程中主要采用前后端分离的方式进行开发测试,也就是前端封装请求,后端提供标准的API接口服务。一般现在json 格式受到开发者们的青睐,学习过程中我们可以设置接口的返回类型,那么怎么做到设置统一的返回格式呢࿱…...

logstash日志换行处理小解
logstash主用于日志实时数据收集、解析,并将数据转发的工具,内置的功能也相当强大。但,同时意味着,他可能接收到各种情况的数据。 此处,我们主要讲解我实际使用中,碰到的一个小问题,换行(\n)。…...
openpnp - 做一个抛料盒
文章目录 openpnp - 做一个抛料盒概述效果图零件 - 抛料盒主体零件 - 磁铁仓盖板END openpnp - 做一个抛料盒 概述 8mm散料飞达做回来了, 上面用的长方形磁铁(4x6x10mm)透过0.8mm的3D打印薄壁, 和固定铁板的吸力很大, 用磁力固定的非常好. 正好缺一个抛料盒, 就按照散料飞达的…...
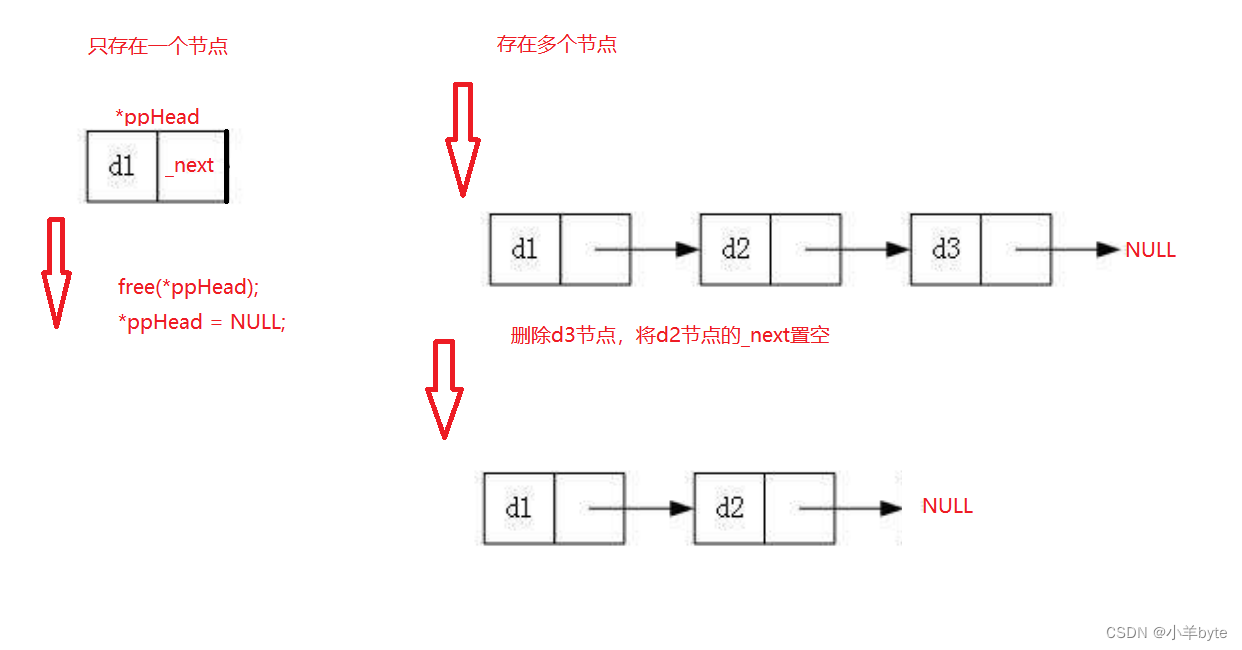
数据结构——单链表的实现(c语言版)
前言 单链表作为顺序表的一种,了解并且熟悉它的结构对于我们学习更加复杂的数据结构是有一定意义的。虽然单链表有一定的缺陷,但是单链表也有它存在的价值, 它也是作为其他数据结构的一部分出现的,比如在图,哈希表中。…...

【计算机组成原理】24王道考研笔记——第四章 指令系统
第四章 指令系统 一、指令系统 指令是指示计算机执行某种操作的命令,是计算机运行的最小功能单位。一台计算机的所有指令的集合构成该 机的指令系统,也称为指令集。 指令格式: 1.1分类 按地址码数目分类: 按指令长度分类&…...

C#使用FileInfo和DirectoryInfo类来执行文件和文件夹操作
System.IO.FileInfo 和 System.IO.DirectoryInfo 是C#中用于操作文件和文件夹的类,它们提供了许多有用的方法和属性来管理文件和文件夹。 System.IO.FileInfo: FileInfo 类用于操作单个文件的信息和内容。以下是一些常用的方法和属性: Exi…...

毕业答辩结束了,但我后悔没早点知道这件事
毕业答辩是学子学术生涯的收官之战,而答辩PPT则是学术成果的“可视化名片”,其逻辑清晰度、重点突出度与专业呈现力,直接影响答辩的最终走向。对多数学子而言,论文定稿后,PPT制作往往成为新的焦虑源泉:要么…...

NVIDIA Vera CPU:首款专为Agentic AI设计的CPU架构深度解析
前言 2026年5月18日,NVIDIA正式宣布其首款专为Agentic AI(智能体AI)设计的CPU——Vera,已完成对Anthropic、OpenAI、SpaceX AI及甲骨文云的首批交付。这一里程碑事件标志着AI计算架构从"GPU中心"向"CPU-GPU协同"的重要转型。本文将深入解析Vera CPU的…...

Taotoken API Key管理功能实现团队权限与访问控制
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken API Key管理功能实现团队权限与访问控制 在团队协作开发或项目管理中,如何安全、可控地分发大模型调用资源是…...
)
保姆级教程:在Ubuntu上把YOLOv5的ONNX模型转成RV1126能用的RKNN模型(附完整代码)
从ONNX到RKNN:YOLOv5模型在RV1126平台的完整转换指南 当清晨的第一缕阳光透过窗帘缝隙洒在键盘上,我正盯着终端里那个顽固的ONNX模型发愁——它已经在我的Ubuntu工作站上运行了整整一夜,却依然没能成功转换为RV1126开发板可用的RKNN格式。这…...

30分钟搞定黑苹果:OpCore Simplify如何让Hackintosh配置从专业难题变成简单操作
30分钟搞定黑苹果:OpCore Simplify如何让Hackintosh配置从专业难题变成简单操作 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为复杂…...

LTM4644国产替代-ITE4644
ITE4644是四路DC/DC降压模块稳压器,每路可以输出4A。输出可以并联在一个阵列中,最高可达16A的能力。封装内包含开关控制器,功率场效应管,电感器和支持组件。工作在输入电压范围4V~14V或者2.375V~14V(INTVCC/SVIN外置偏置电压)。 I…...
)
Windows管道通信踩坑记:客户端异常退出后,服务端如何优雅重建命名管道实例(附C++代码)
Windows管道通信实战:客户端异常退出时的服务端健壮性设计 命名管道(Named Pipe)是Windows平台进程间通信(IPC)的核心机制之一,但在实际工程中,客户端异常退出的场景常常成为稳定性短板。当客户…...
)
安卓用户专属福利:免费开源工具一键搞定.m3u8.sqlite视频提取与合并(附TS转MP4方法)
安卓用户专属:零门槛实现.m3u8.sqlite视频提取与格式转换全攻略 每次在手机上缓存了课程视频,却发现文件格式无法直接播放?作为安卓用户,你可能经常遇到.m3u8.sqlite这种特殊缓存格式的困扰。本文将为你揭秘这类文件的本质&#x…...

从CentOS 7/8老用户视角:快速上手CentOS 9 Stream的3个界面变化与5个安装配置新坑
从CentOS 7/8老用户视角:快速上手CentOS 9 Stream的3个界面变化与5个安装配置新坑 作为一名长期与CentOS打交道的系统管理员,第一次接触CentOS 9 Stream时,那种"熟悉又陌生"的感觉尤为明显。表面上看,它延续了红帽系一贯…...

Prodigal原核生物基因预测工具:3天从零到精通的完整指南
Prodigal原核生物基因预测工具:3天从零到精通的完整指南 【免费下载链接】Prodigal Prodigal Gene Prediction Software 项目地址: https://gitcode.com/gh_mirrors/pr/Prodigal 你是否正在为原核生物基因组分析而烦恼?面对海量的DNA序列数据&…...