【目标检测】目标检测 相关学习笔记
目标检测算法
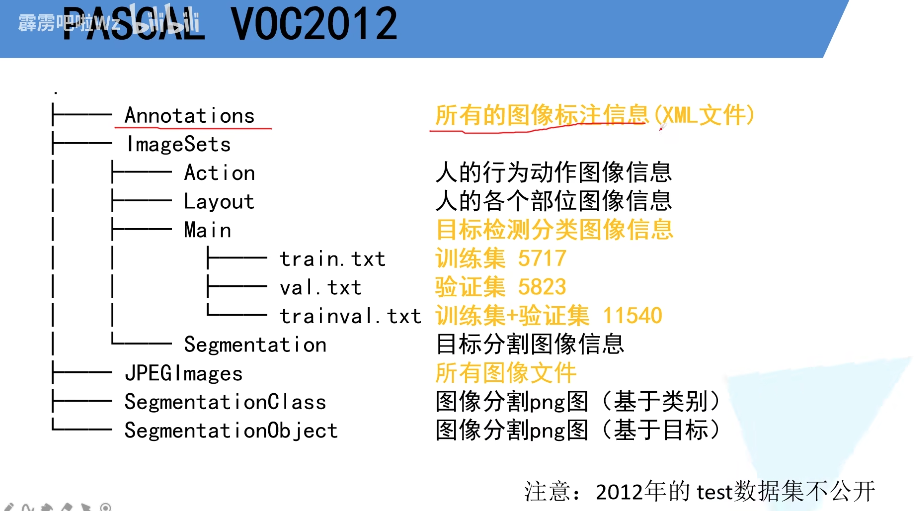
PASCALVOC2012数据集
挑战赛主要分为 图像分类 目标检测 目标分割 动作识别
数据集分为四个大类 交通(飞机 船 公交车 摩托车) 住房(杯子 椅子 餐桌 沙发) 动物(鸟 猫 奶牛 狗 马 羊) 其他(人)
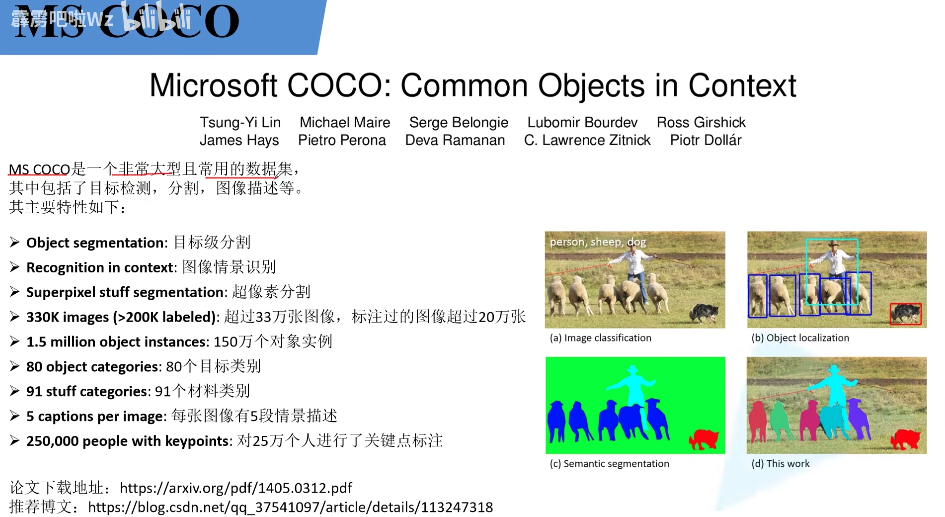
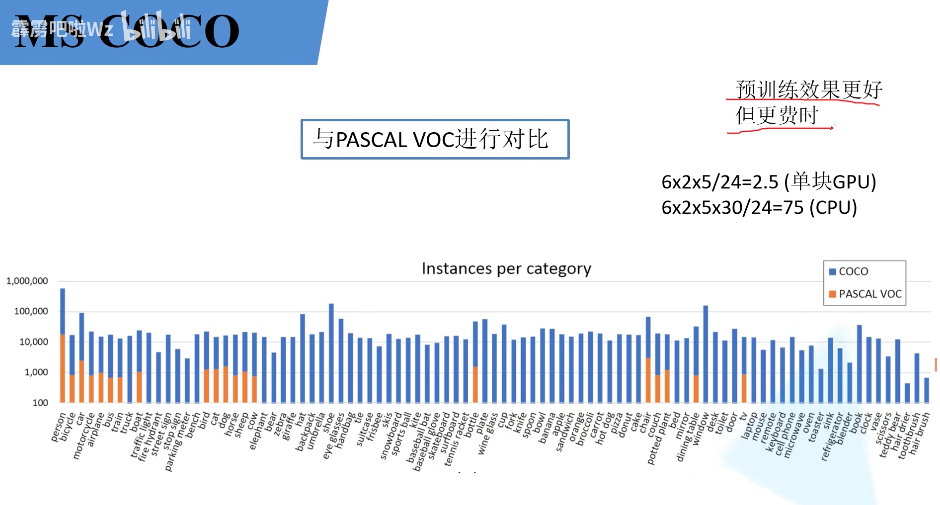
MS COCO数据集
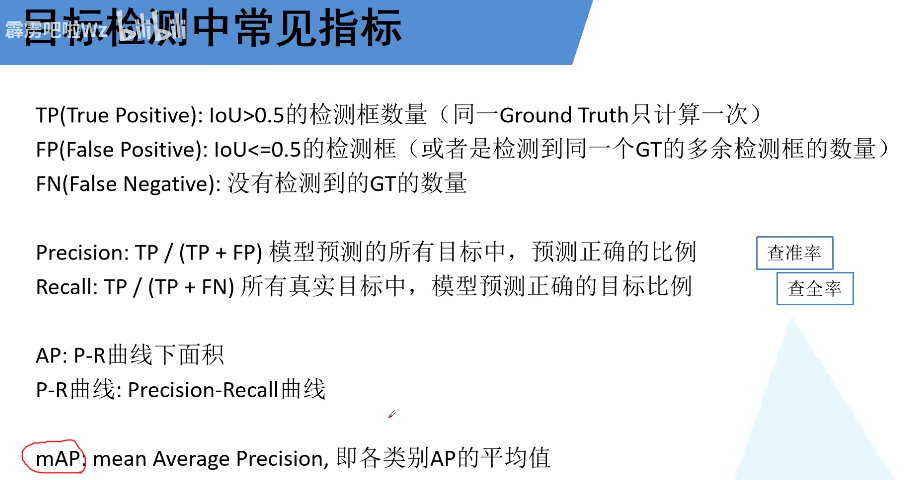
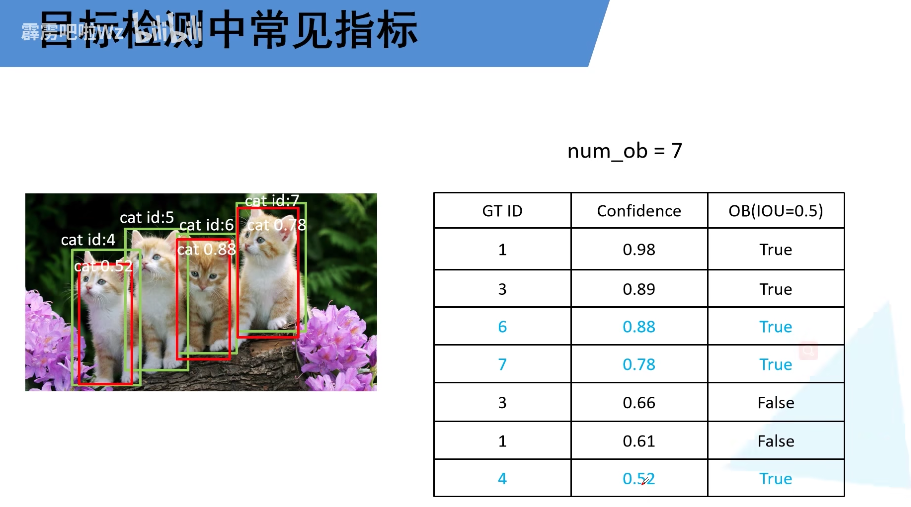
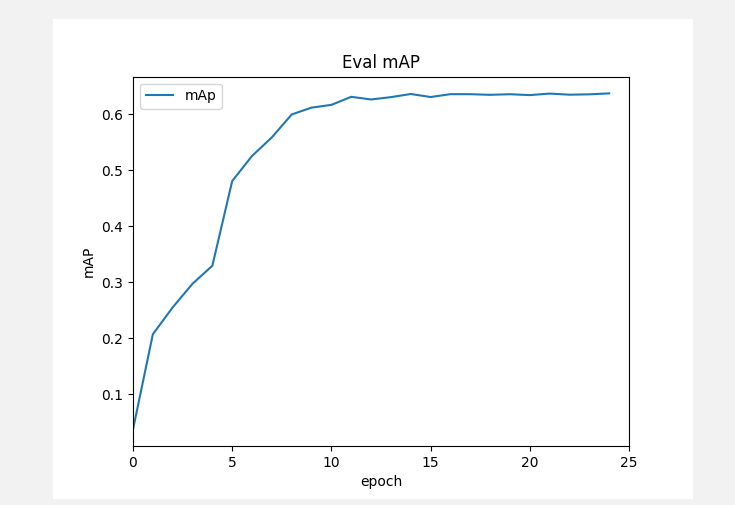
mAP
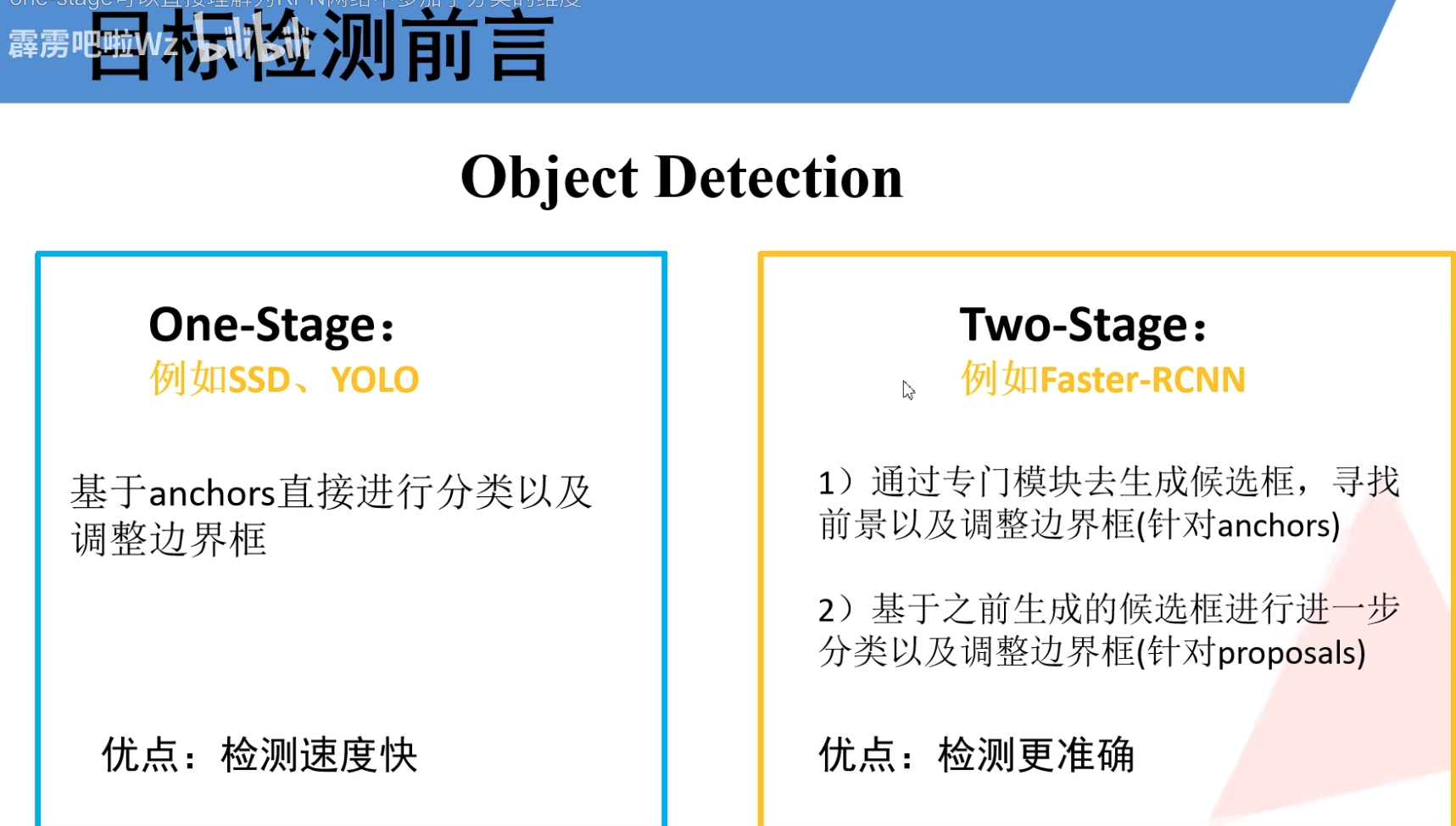
目标检测前言
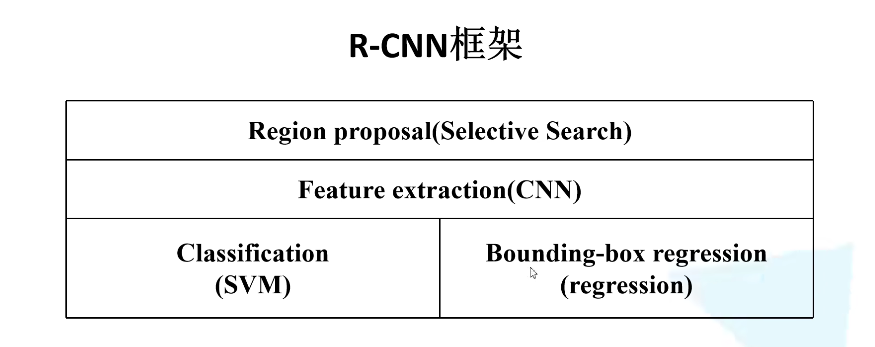
1. RCNN
1.框定候选区
2.对每一个候选区域,使用深度网络提取特征
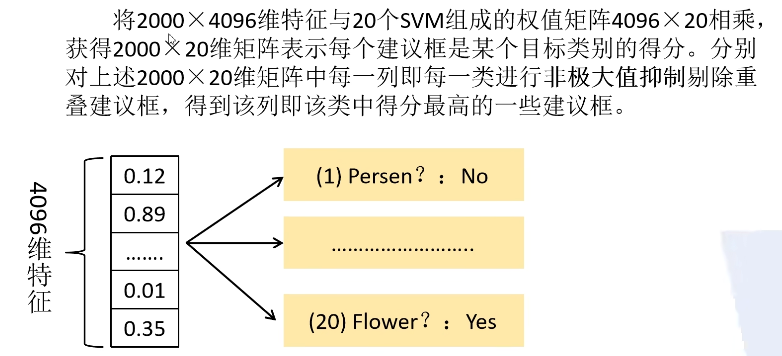
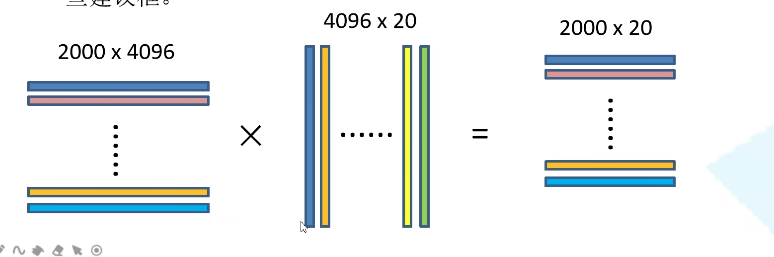
3.将特征送入每一类的SVM分类器,判定类别
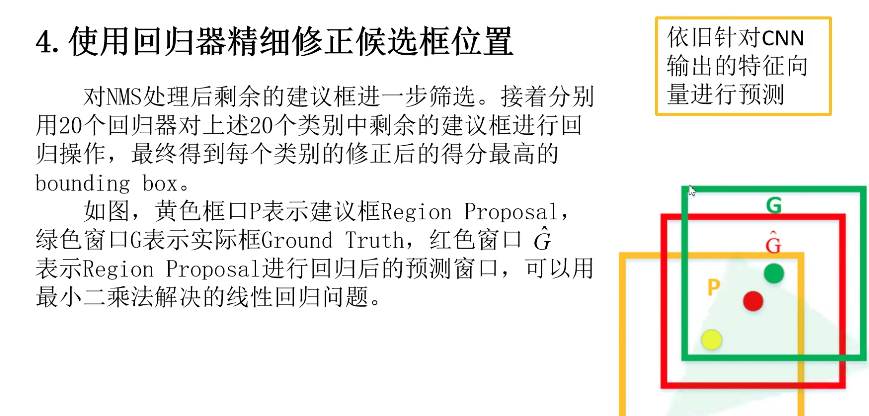
4.使用回归器精细修正候选框位置
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-3LsnYSGV-1692175490949)(/Users/hudie/Library/Application%20Support/typora-user-images/image-20230323093521225.png)]
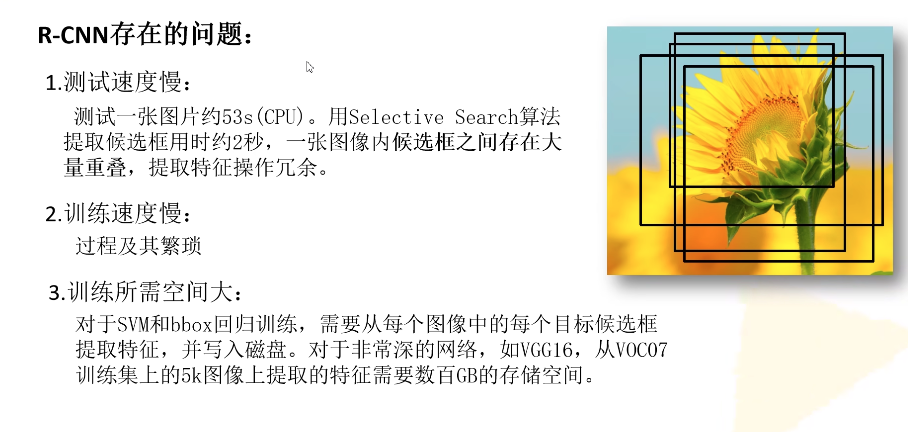
RCNN存在的问题
1.速度慢
2.空间大
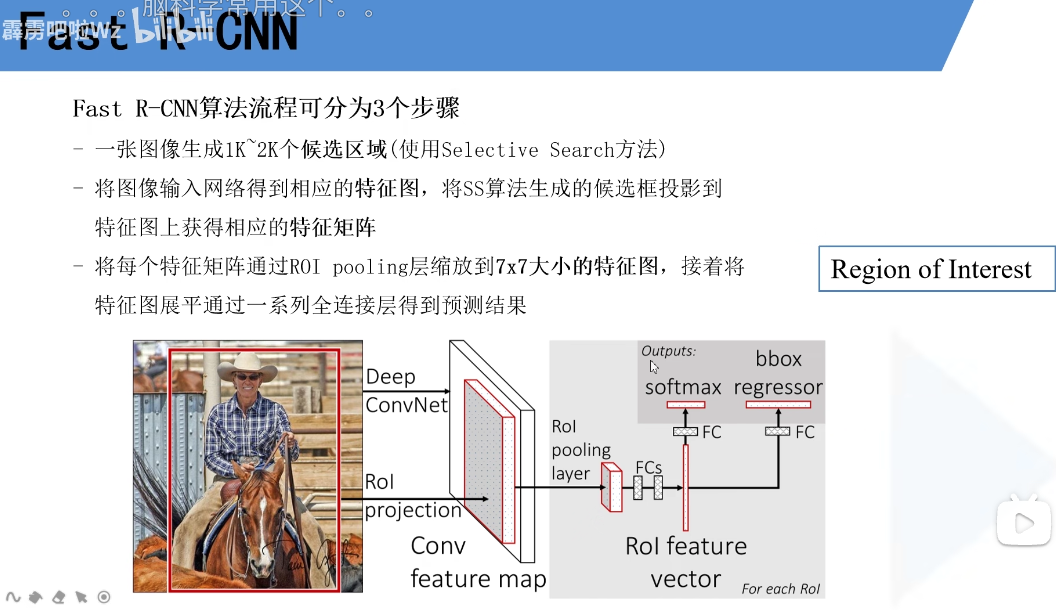
2.FasterRCNN

3 Faster R-CNN
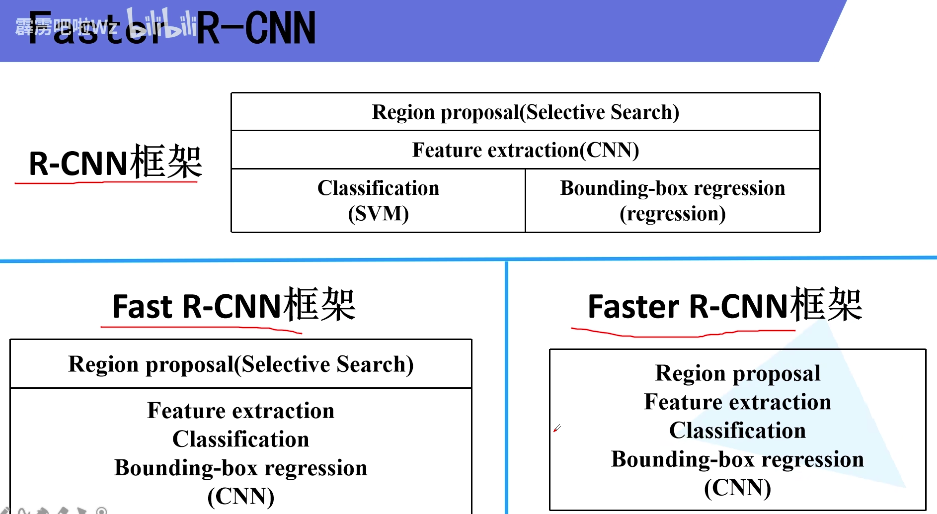
Faster RCNN检测部分主要可以分为四个模块:
(1)conv layers。即特征提取网络,用于提取特征。通过一组conv+relu+pooling层来提取图像的feature maps,用于后续的RPN层和取proposal。
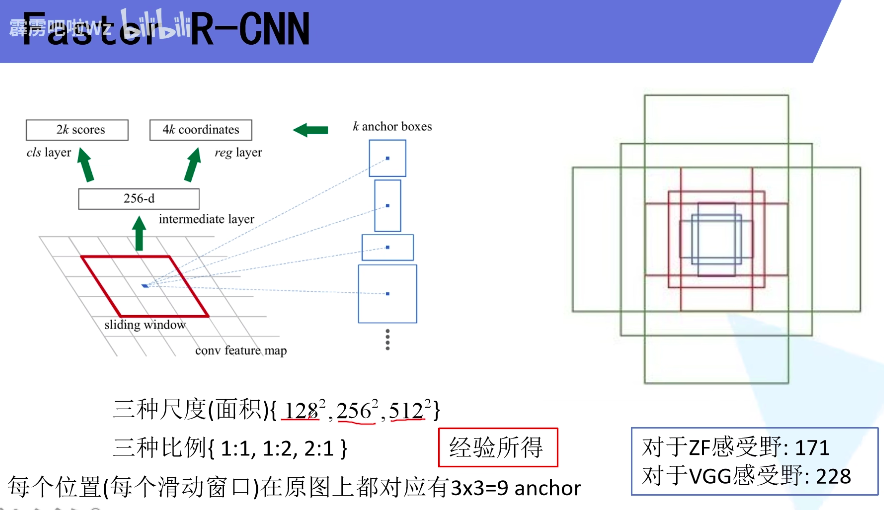
(2)RPN(Region Proposal Network)。即区域候选网络,该网络替代了之前RCNN版本的Selective Search,用于生成候选框。这里任务有两部分,一个是分类:判断所有预设anchor是属于positive还是negative(即anchor内是否有目标,二分类);还有一个bounding box regression:修正anchors得到较为准确的proposals。因此,RPN网络相当于提前做了一部分检测,即判断是否有目标(具体什么类别这里不判),以及修正anchor使框的更准一些。
(3)RoI Pooling。即兴趣域池化(SPP net中的空间金字塔池化),用于收集RPN生成的proposals(每个框的坐标),并从(1)中的feature maps中提取出来(从对应位置扣出来),生成proposals feature maps送入后续全连接层继续做分类(具体是哪一类别)和回归。
(4)Classification and Regression。利用proposals feature maps计算出具体类别,同时再做一次bounding box regression获得检测框最终的精确位置
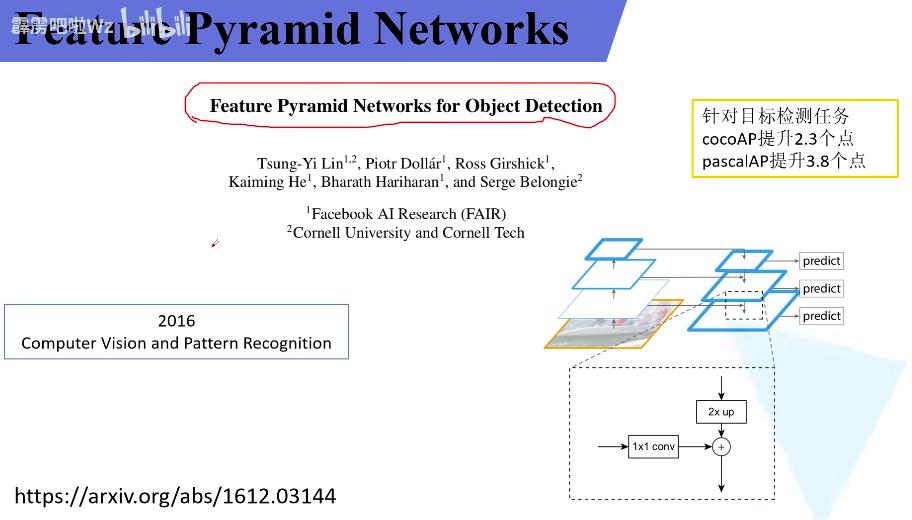
FPN 结构讲解
Region Proposal Network,直接翻译是“区域生成网络”,通俗讲是“筛选出可能会有目标的框”。其本质是基于滑窗的无类别object检测器,输入是任意尺度的图像,输出是一系列矩形候选区域
Faster R-CNN由两个模块组成,第一个模块是用来产生区域推荐的RPN,第二个模块是使用推荐区域的Fast R-CNN检测器。
传统检测方法提取候选区域都非常耗时,如OpenCV adaboost使用滑动窗口+图像金字塔,或R-CNN使用SS(Selective Search)。而Faster RCNN直接使用RPN生成检测框,能极大提升检测框的生成速度,而RPN是用一个全卷积网络来实现的,可以与检测网络共享整幅图像的卷积特征,从而产生几乎无代价的区域推荐
非极大值抑制
Non-Maximum Suppression的翻译是非“极大值”抑制,而不是非“最大值”抑制。这就说明了这个算法的用处:找到局部极大值,并筛除(抑制)邻域内其余的值
SSD
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-CMCbTRvH-1692175490951)(https://cdn.staticaly.com/gh/hudiework/img@main/image-20230425093635171.png)]
经典算法
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-RJm3pHfV-1692175490951)(https://cdn.staticaly.com/gh/hudiework/img@main/image-20230425154244293.png)]
实际上训练结果 faster 和ssd 训练结果 差不多 如果训练集比较小的话 那么 faster rcnn 比ssd训练结果要好一点 ssd 检测速度要比rcnn块很多 单gpu可以检测50-60张 fpn+ssd = RetinaNet 检测精度差不多 == fpn+ faster rcnn 但是检测速度快很多
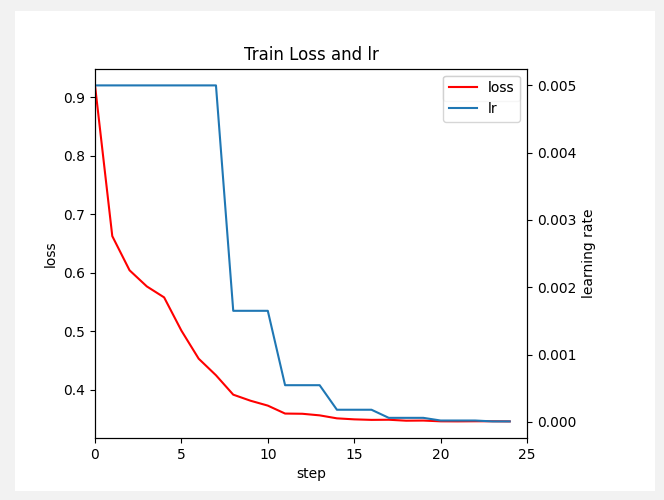
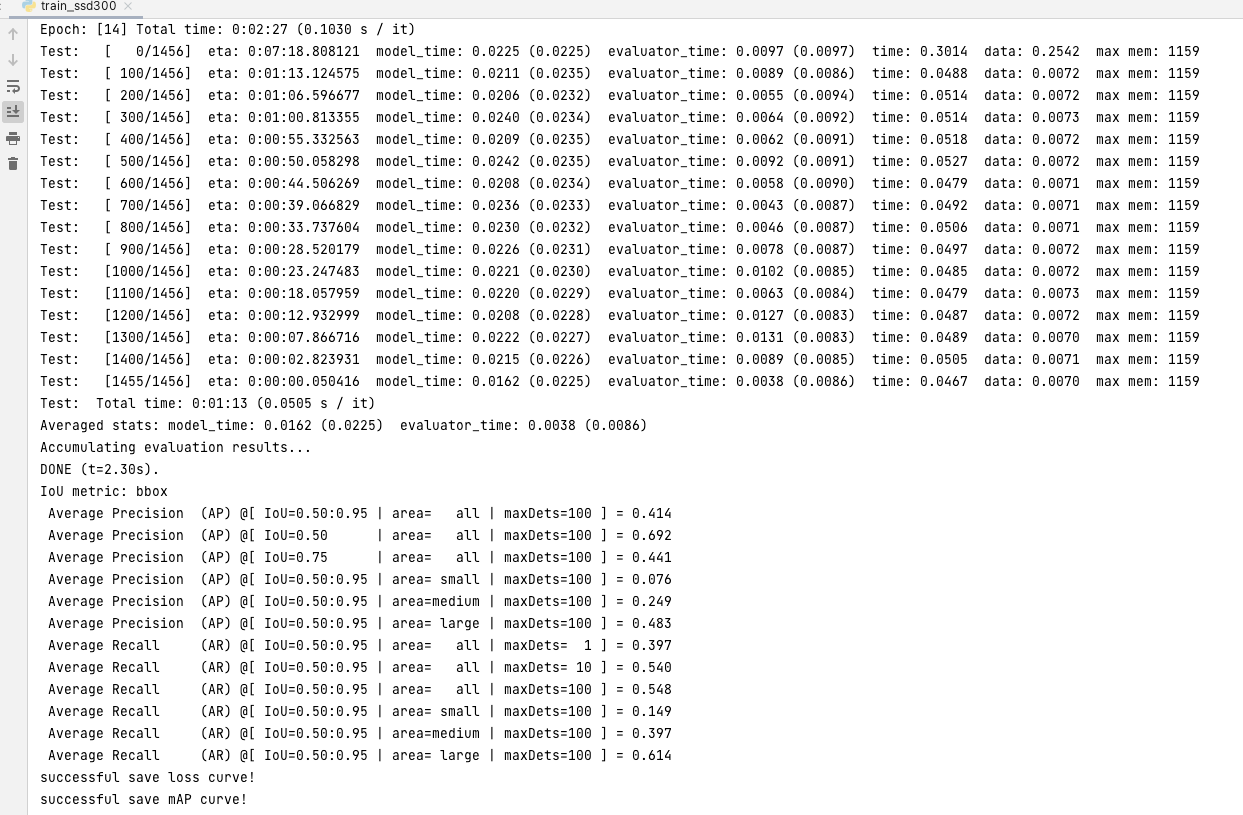
SSD: 训练结果
YOLO

yolov1
YoloV1 对于群体性的小目标 适应性效果更差 小的值并且目标比较密集的话 yolov1 是不能做的 主要的就是 定位不准确 直接定位 而不是相对于 anchor进行回归预测
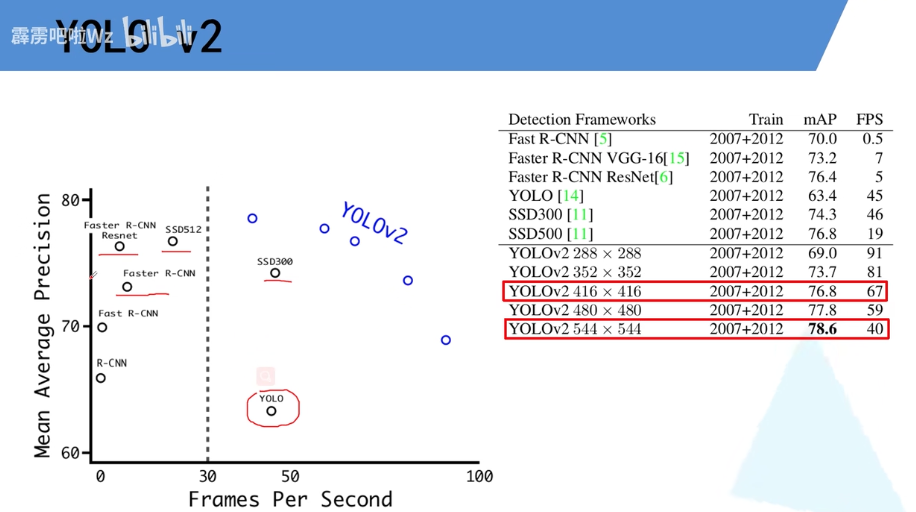
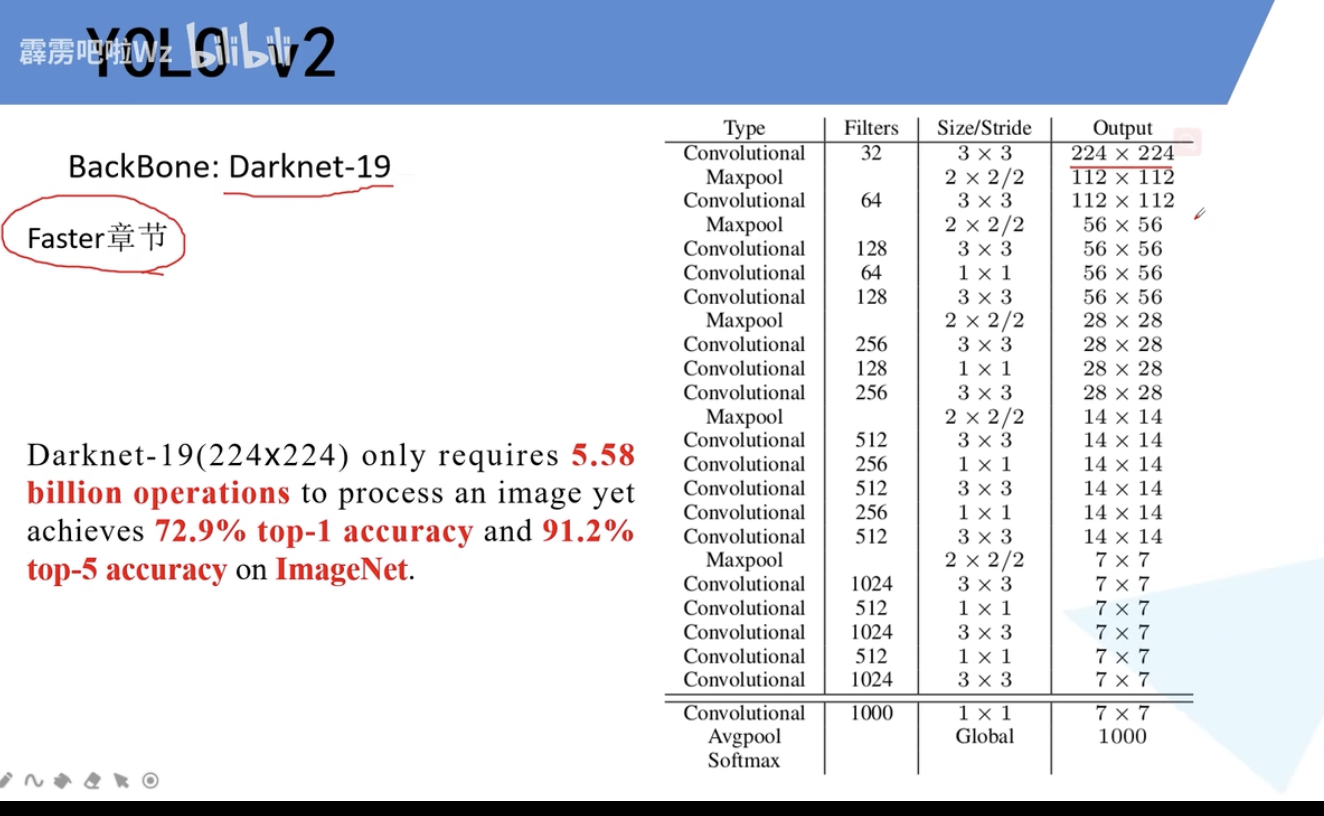
Yolov2
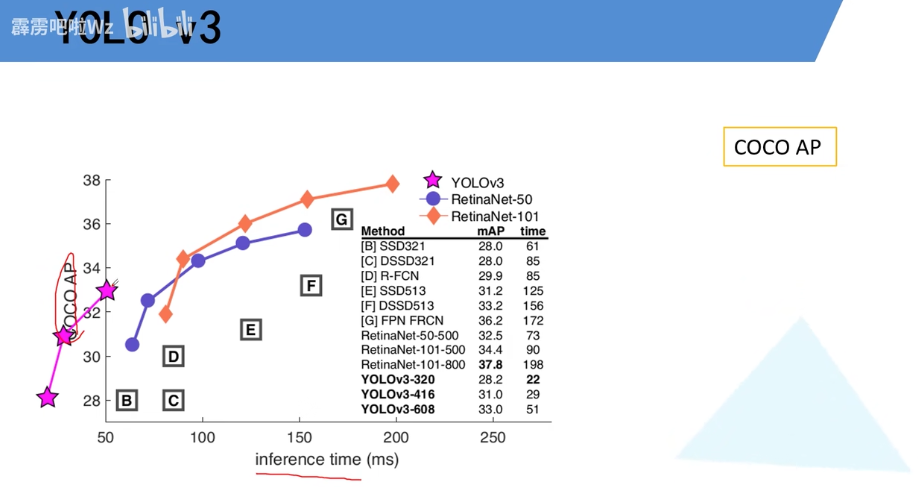
YOLOV3
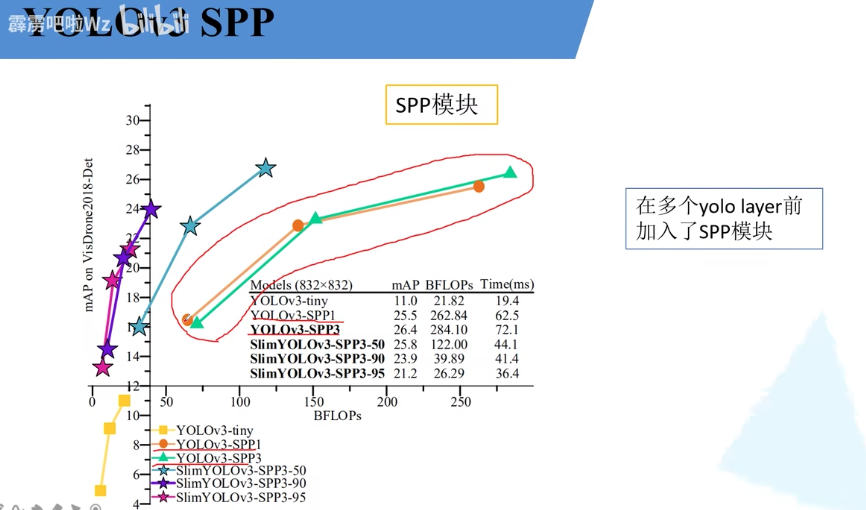
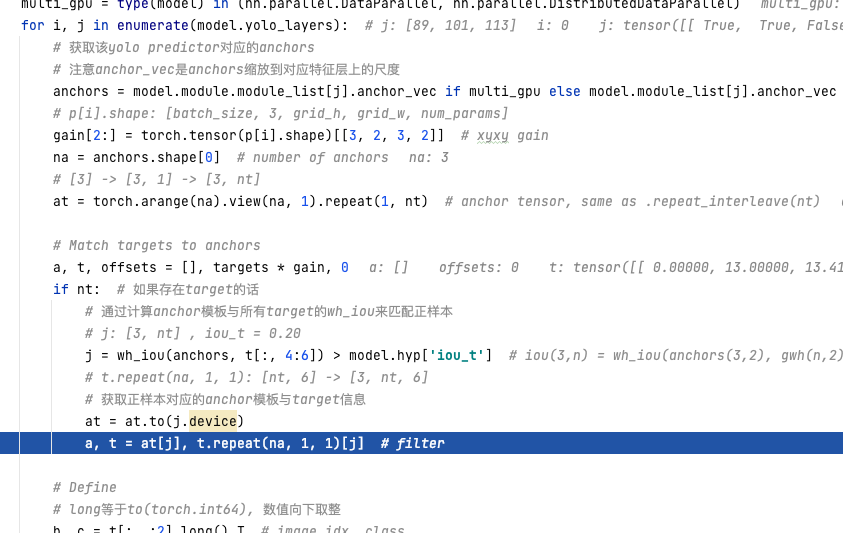
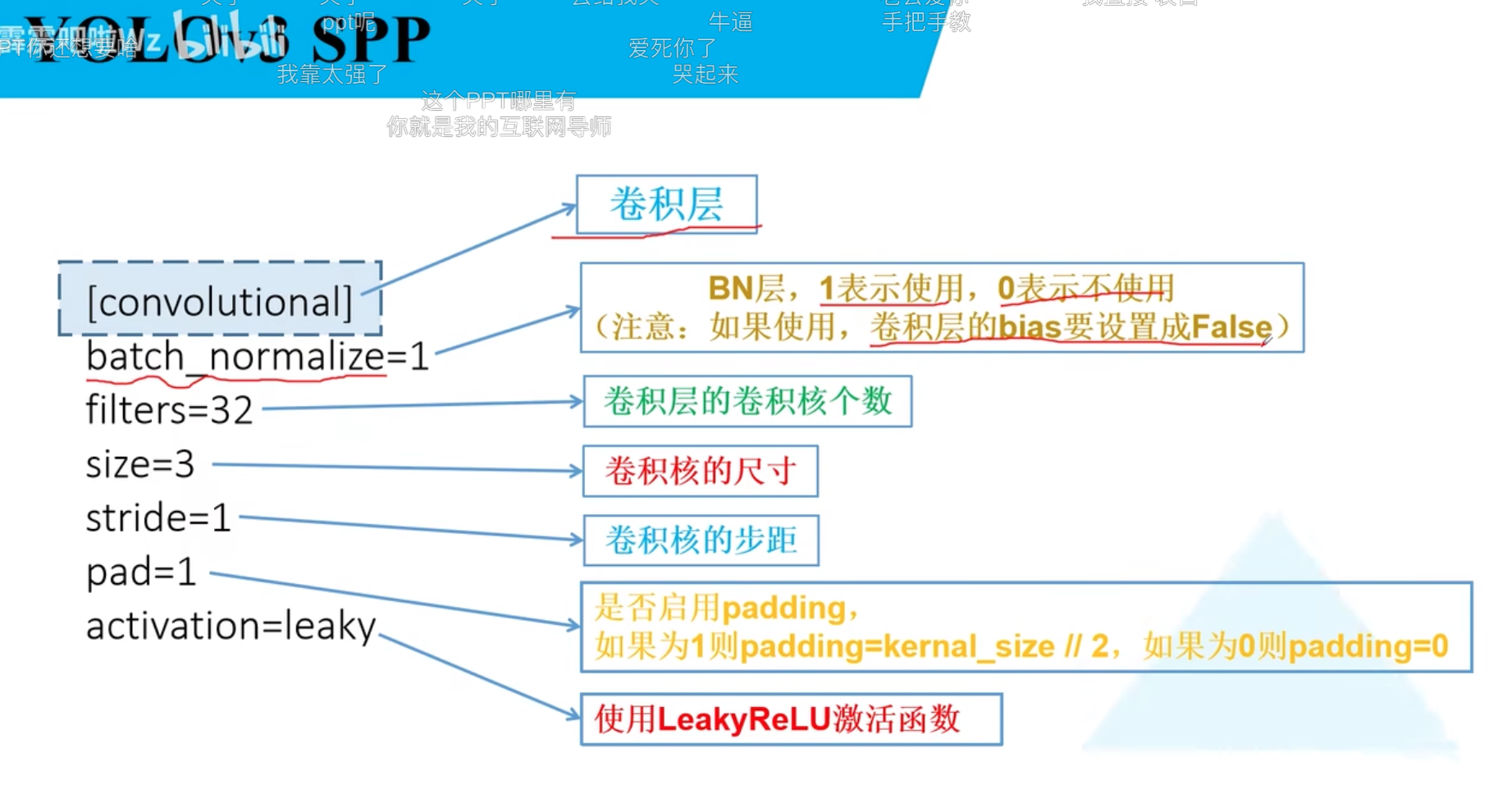
yoloV3spp
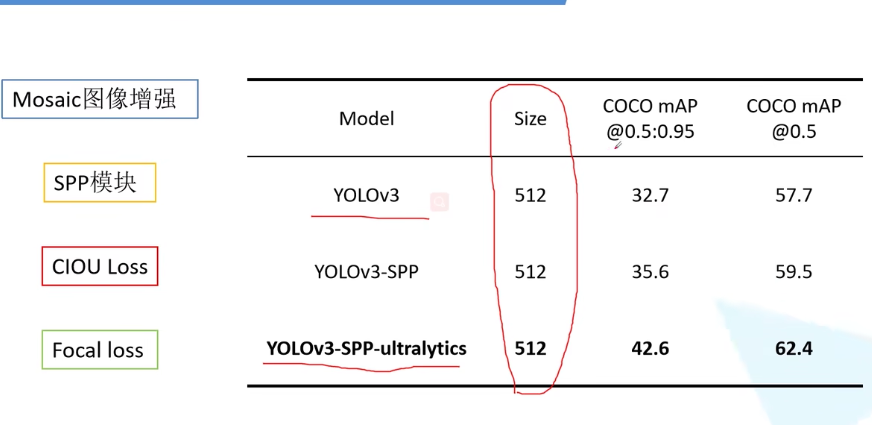

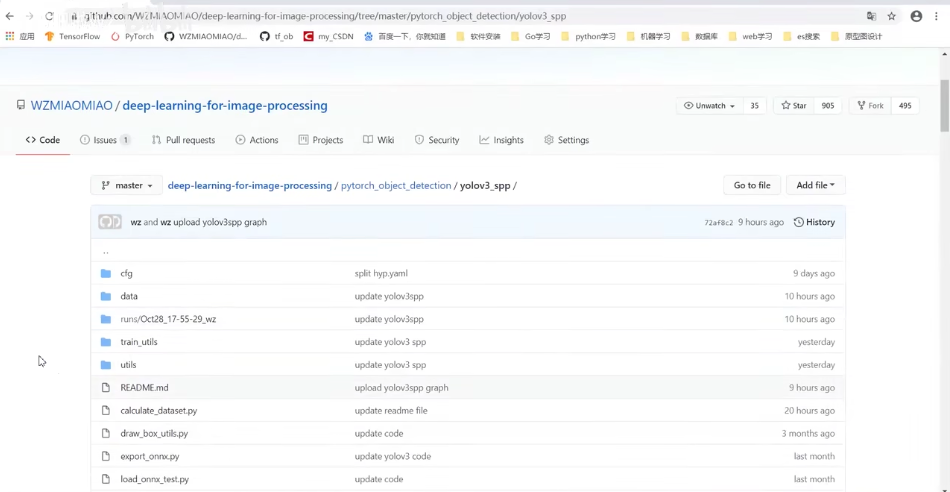

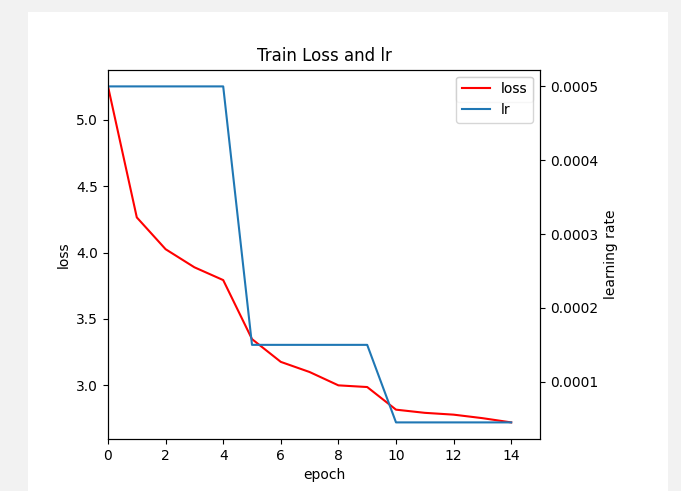
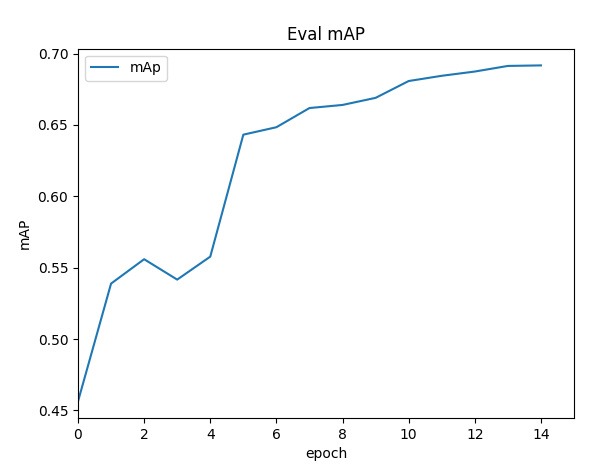
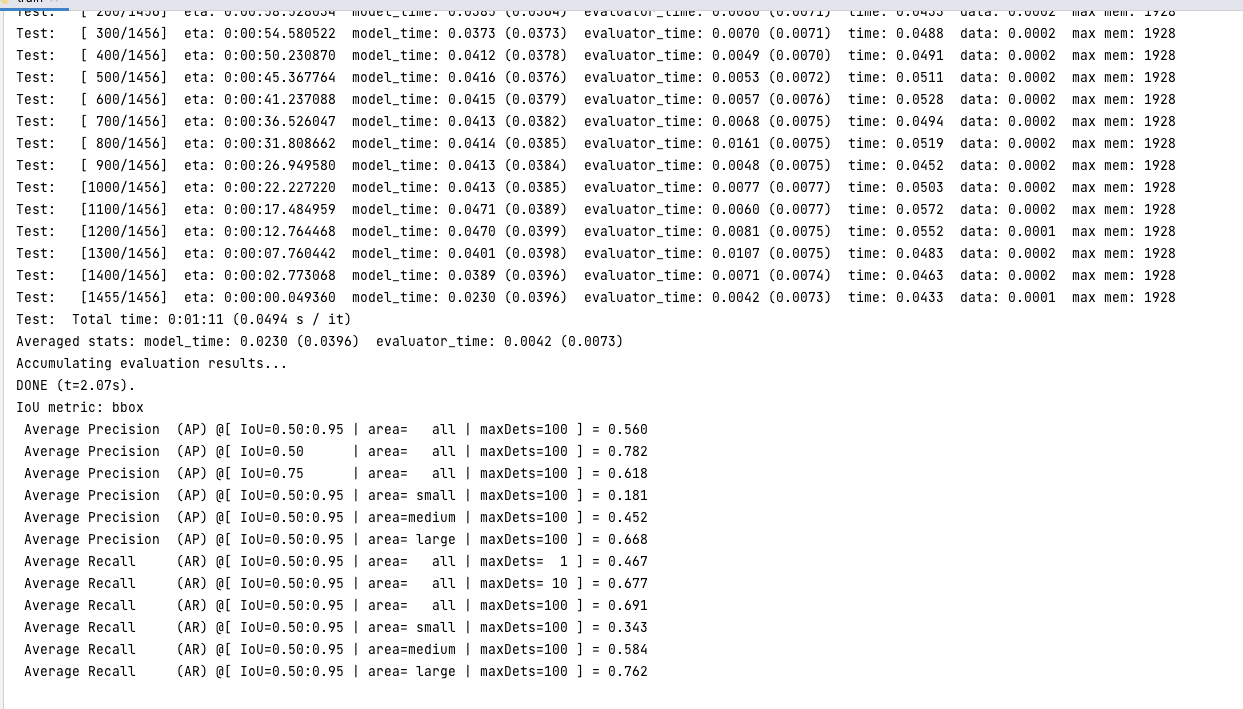
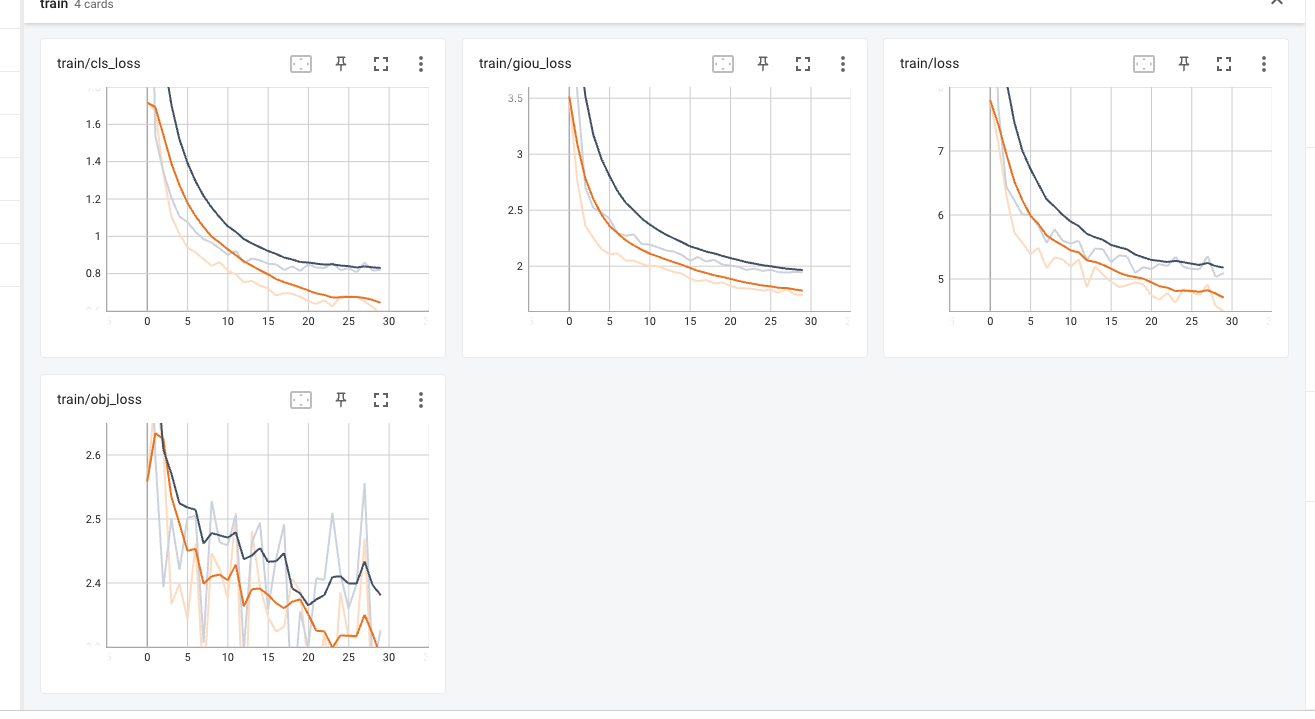
yoloV3SPP训练:
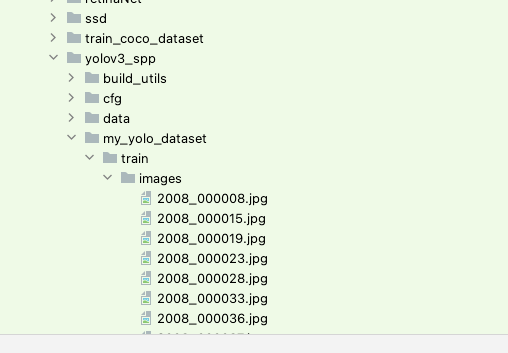
第一步 先将pascal数据集转换成yolo专用的数据格式

分割之后的数据集显示、
YoloV4
YOLOv4是2020年Alexey Bochkovskiy等人发表在CVPR上的一篇文章,并不是Darknet的原始作者Joseph Redmon发表的,但这个工作已经被Joseph Redmon大佬认可了。之前我们有聊过YOLOv1~YOLOv3以及Ultralytics版的YOLOv3 SPP网络结构,如果不了解的可以参考之前的视频,YOLO系列网络详解。如果将YOLOv4和原始的YOLOv3相比效果确实有很大的提升,但和Ultralytics版的YOLOv3 SPP相比提升确实不大,但毕竟Ultralytics的YOLOv3 SPP以及YOLOv5都没有发表过正式的文章,所以不太好讲。所以今天还是先简单聊聊Alexey Bochkovskiy的YOLOv4。
https://blog.csdn.net/qq_37541097/article/details/123229946?spm=1001.2014.3001.5501
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-gOAlg63O-1692175490953)(…/…/Library/Application%20Support/typora-user-images/image-20230509150732751.png)]
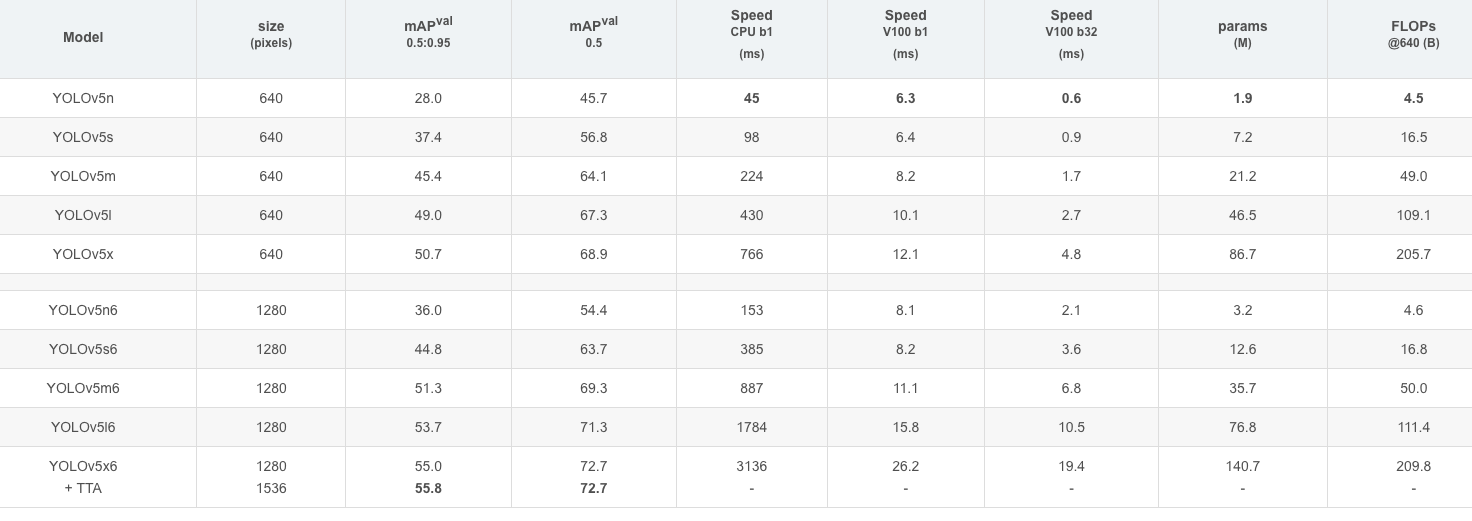
YoloV5
https://blog.csdn.net/qq_37541097/article/details/123594351?spm=1001.2014.3001.5501
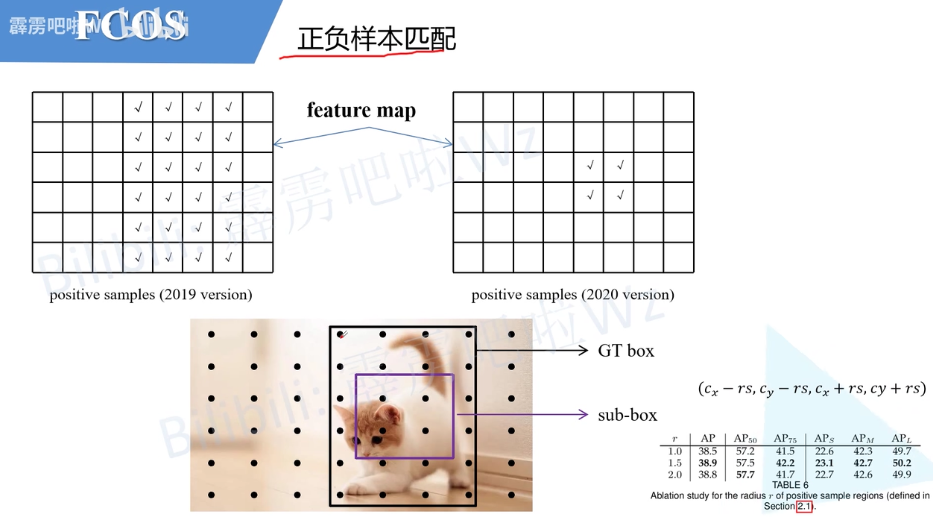
FCOS:
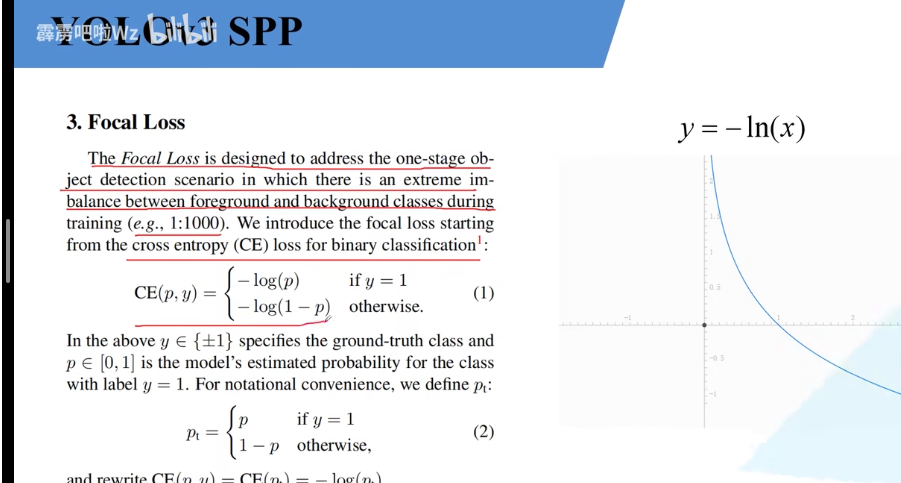
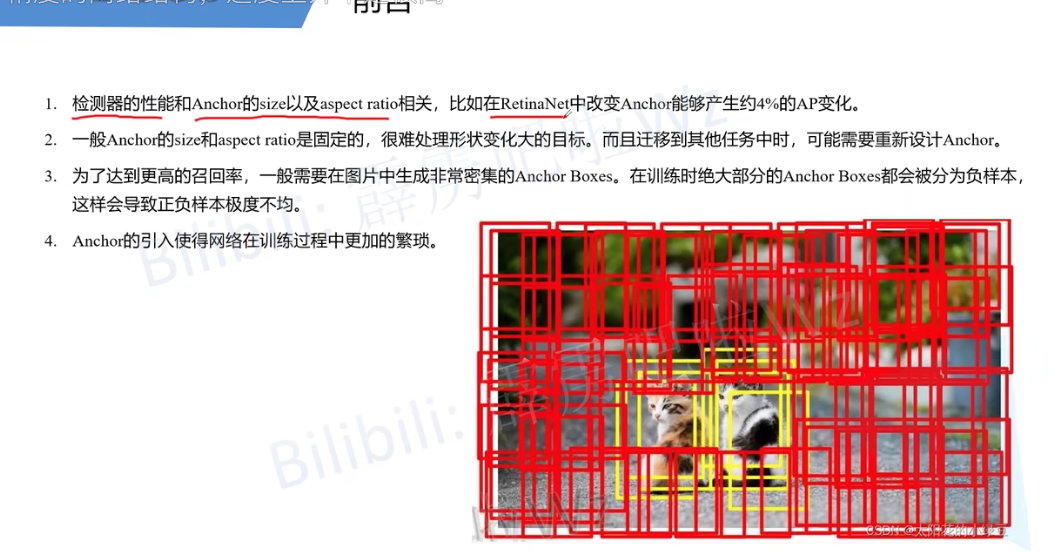
在之前讲的一些目标检测网络中,比如Faster RCNN系列、SSD、YOLOv2~v5(注意YOLOv1不包括在内)都是基于Anchor进行预测的。即先在原图上生成一堆密密麻麻的Anchor Boxes,然后网络基于这些Anchor去预测它们的类别、中心点偏移量以及宽高缩放因子得到网络预测输出的目标,最后通过NMS即可得到最终预测目标。那基于Anchor的网络存在哪些问题呢,在FCOS论文的Introduction中,作者总结了四点:
- 检测器的性能和Anchor的size以及aspect ratio相关,比如在RetinaNet中改变Anchor(论文中说这是个超参数
hyper-parameters)能够产生约4%的AP变化。换句话说,Anchor要设置的合适才行。- 一般Anchor的size和aspect ratio都是固定的,所以很难处理那些形状变化很大的目标(比如一本书横着放w远大于h,竖着放h远大于w,斜着放w可能等于h,很难设计出合适的Anchor)。而且迁移到其他任务中时,如果新的数据集目标和预训练数据集中的目标形状差异很大,一般需要重新设计Anchor。
- 为了达到更高的召回率(查全率),一般需要在图片中生成非常密集的Anchor Boxes尽可能保证每个目标都会有Anchor Boxes和它相交。比如说在FPN(Feature Pyramid Network)中会生成超过18万个Anchor Boxes(以输入图片最小边长800为例),那么在训练时绝大部分的Anchor Boxes都会被分为负样本,这样会导致正负样本极度不均。下图是我随手画的样例,红色的矩形框都是负样本,黄色的矩形框是正样本。
- Anchor的引入使得网络在训练过程中更加的繁琐,因为匹配正负样本时需要计算每个Anchor Boxes和每个GT BBoxes之间的IoU。
YoloX
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-FH5u3ZHP-1692175490954)(…/…/Library/Application%20Support/typora-user-images/image-20230509192721569.png)]
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-xce3laRw-1692175490954)(…/…/Library/Application%20Support/typora-user-images/image-20230509193705340.png)]
相关文章:
【目标检测】目标检测 相关学习笔记
目标检测算法 PASCALVOC2012数据集 挑战赛主要分为 图像分类 目标检测 目标分割 动作识别 数据集分为四个大类 交通(飞机 船 公交车 摩托车) 住房(杯子 椅子 餐桌 沙发) 动物(鸟 猫 奶牛 狗 马 羊) 其他&a…...
)
面试攻略,Java 基础面试 100 问(十六)
反射使用步骤(获取Class对象、调用对象方法) 获取想要操作的类的Class对象,他是反射的核心,通过Class对象我们可以任意调用类的方法。 调用 Class 类中的方法,既就是反射的使用阶段。 使用反射 API 来操作这些信息。 什么是 java 序列化&…...

章节5:脚本注入网页-XSS
章节5:脚本注入网页-XSS XSS :Cross Site Script 恶意攻击者利用web页面的漏洞,插入一些恶意代码,当用户访问页面的时候,代码就会执行,这个时候就达到了攻击的目的。 JavaScript、Java、VBScript、Activ…...
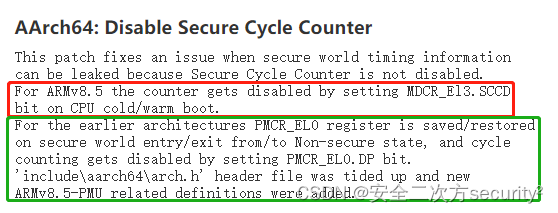
ATF(TF-A)安全通告 TFV-5 (CVE-2017-15031)
安全之安全(security)博客目录导读 ATF(TF-A)安全通告汇总 目录 一、ATF(TF-A)安全通告 TFV-5 (CVE-2017-15031) 二、CVE-2017-15031 一、ATF(TF-A)安全通告 TFV-5 (CVE-2017-15031) Title 未初始化或保存/恢复PMCR_EL0可能会泄露安全世界的时间信息 CVE ID CVE-2017-1503…...
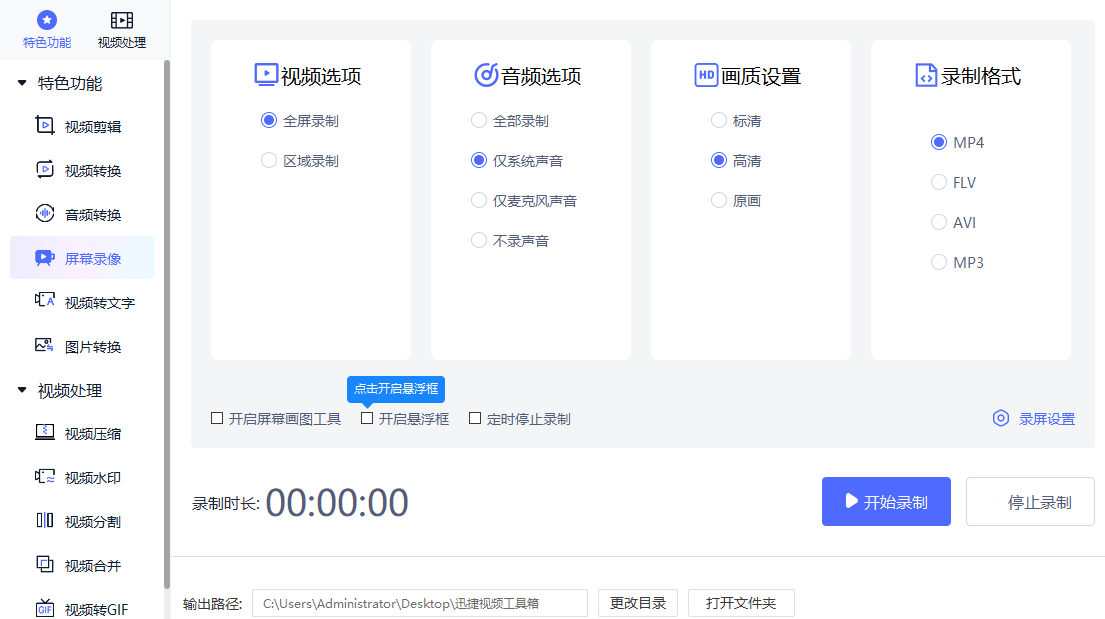
迅捷视频工具箱:多功能音视频处理软件
这是一款以视频剪辑、视频转换、屏幕录像等特色功能为主,同时附带有视频压缩、视频分割、视频合并等常用视频处理功能为主的视频编辑软件。该软件操作简单易用,即使没有视频处理经验的用户也可以轻松上手。将视频添加到工具箱对应功能后,简单…...
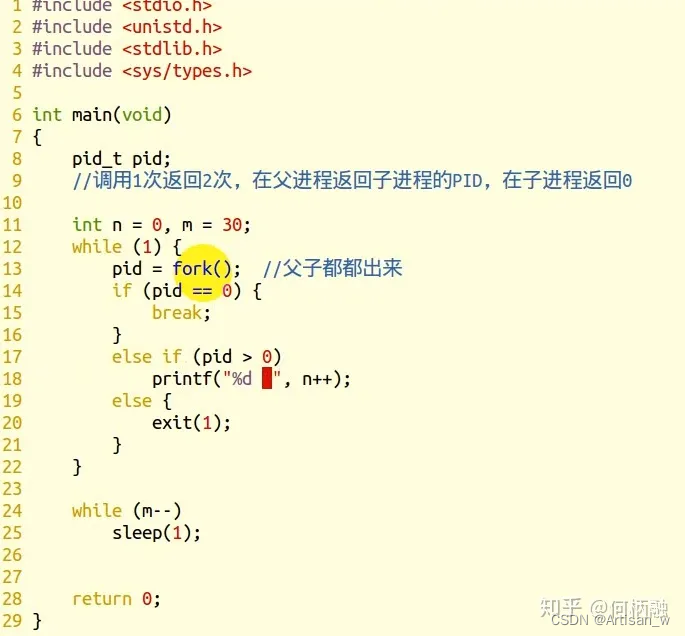
linux--fork()详解
fork() 参考链接:链接 进程控制原语包括:进程的建立、进程的撤销、进程的等待和进程的唤醒。 fork,在英语用译为叉子,形状像Y,反过来就如下图: 就是本来只有一个进行app,然后它调用了fork()函数…...

go_并发编程(1)
go并发编程 一、 并发介绍1,进程和线程2,并发和并行3,协程和线程4,goroutine 二、 Goroutine1,使用goroutine1)启动单个goroutine2)启动多个goroutine 2,goroutine与线程3࿰…...

第一百一十五回 权限管理包permission_handler
文章目录 概念介绍使用方法示例代码经验分享 我们在上一章回中介绍了局部动态列表相关的内容,本章回中将介绍权限管理包 permission_hanadler.闲话休提,让我们一起Talk Flutter吧。 概念介绍 权限是使用某种功能的授权,比如使用手机上的相机…...
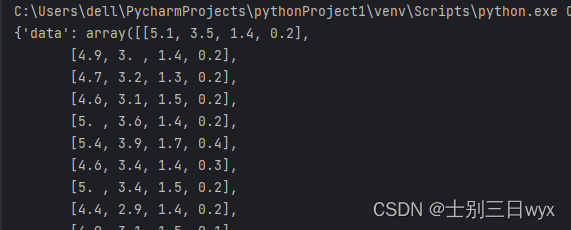
【机器学习】sklearn数据集的使用,数据集的获取和划分
「作者主页」:士别三日wyx 「作者简介」:CSDN top100、阿里云博客专家、华为云享专家、网络安全领域优质创作者 「推荐专栏」:对网络安全感兴趣的小伙伴可以关注专栏《网络安全入门到精通》 sklearn数据集 二、安装sklearn二、获取数据集三、…...

Mysql之 optimizer_trace 相关总结
Mysql之 optimizer_trace 相关总结 MySQL官网介绍:https://dev.mysql.com/doc/dev/mysql-server/latest/PAGE_OPT_TRACE.html 1. 简介 MySQL优化器可以生成Explain执行计划,通过执行计划查看sql是否使用了索引,使用了哪种索; 但…...

【Linux命令详解 | wget命令】 wget命令用于从网络下载文件,支持HTTP、HTTPS和FTP协议
文章标题 简介一,参数列表二,使用介绍1. 基本文件下载2. 递归下载整个网站3. 限制下载速率4. 防止SSL证书校验5. 断点续传6. 指定保存目录7. 自定义保存文件名8. 增量下载9. 使用HTTP代理10. 后台下载 总结 简介 在编程世界中,处理网络资源是…...

DockePod信号处理机制与僵尸进程优化
Docke&Pod信号处理与僵尸进程优化 容器与信号的关系 SIGTERM信号:程序结束(terminate)信号,这是用来终止进程的标准信号,也是 kill 、 killall 、 pkill 命令所发送的默认信号。与SIGKILL不同的是该信号可以被阻塞和处理。通常用来要求程…...
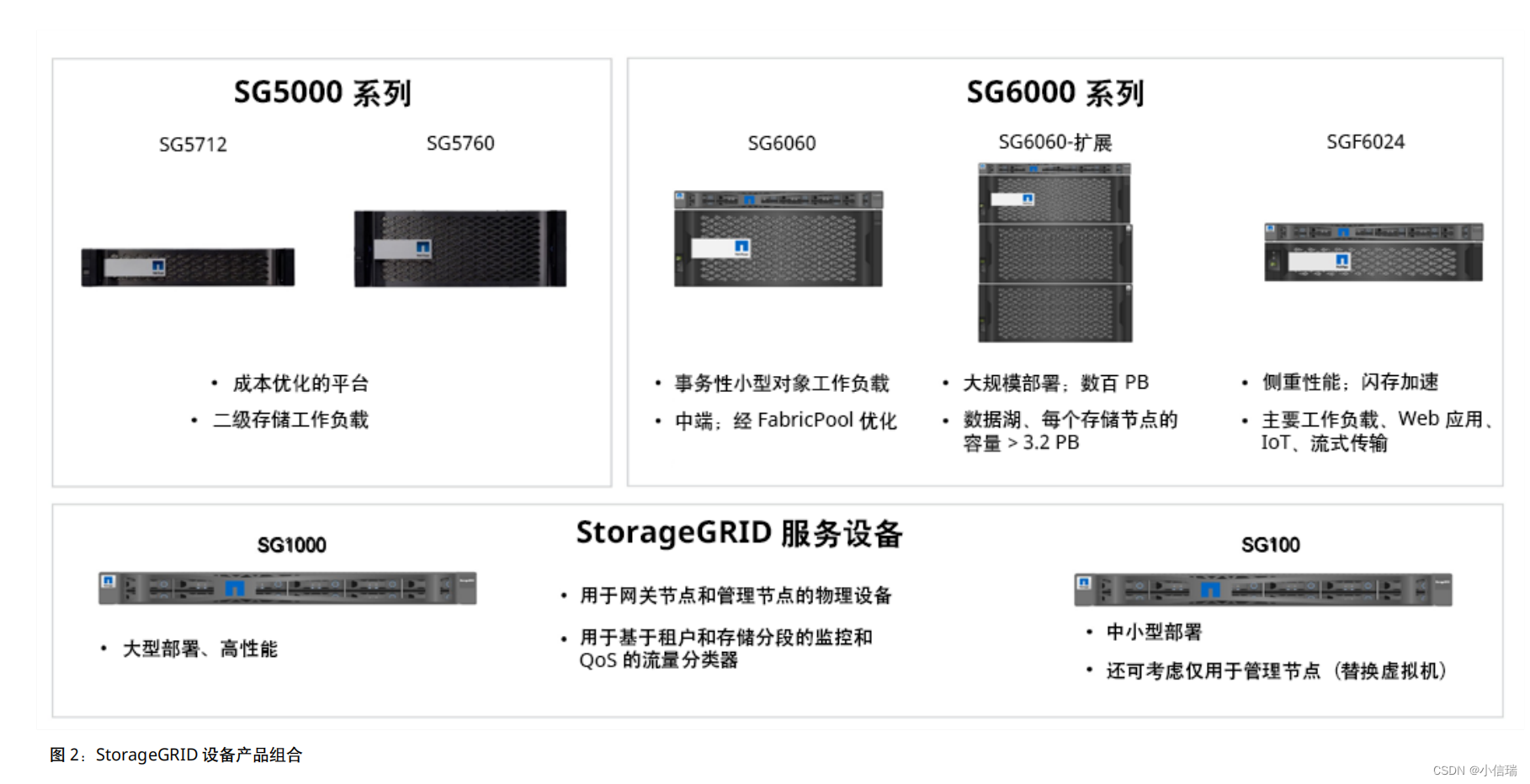
NetApp StorageGRID 对象存储,使您能够跨公有、私有云和混合多云环境管理非结构化数据
NetApp StorageGRID 对象存储,使您能够跨公有、私有云和混合多云环境管理非结构化数据 主要优势 智能:了解行业领先的数据生命周期管理软件。 • 借助 NetApp StorageGRID 基于对象的存储解决方案的数据管理功能、您可以从大型非结构化数据中获得高价值…...

使用Java服务器实现UDP消息的发送和接收(多线程)
目录 简介:1. 导入必要的库2. 创建服务器端代码3. 创建客户端代码4. 实现多线程处理5. 测试运行示例代码:函数说明服务器端代码说明:客户端代码说明: 总结: 简介: 在本篇博客中,我们将介绍如何…...

Linux--查看端口占用情况
查看端口占用情况 在Linux使用过程中,需要了解当前系统开放了哪些端口,并且要查看开放这些端口的具体进程和用户,可以通过netstat命令进行简单查询 netstat命令各个参数说明如下: -t : 指明显示TCP端口 -u : 指明显示UDP…...
微信小程序|自定义弹窗组件
目录 引言小程序的流行和重要性自定义弹出组件作为提升用户体验和界面交互的有效方式什么是自定义弹出组件自定义弹出组件的概念弹出层组件在小程序中的作用和优势为什么需要自定义弹出组件现有的标准弹窗组件的局限性自定义弹出组件在解决这些问题上的优势最佳实践和注意事...
【数据结构】实现顺序表
目录 一.介绍顺序表二.实现顺序表1.创建多文件2.顺序表的存储方式3.函数的声明4.初始化顺序表5.清理顺序表6.打印顺序表7.扩容8.尾插8.尾删9.头插10.头删11.查找12.修改13.在pos位置插入13.在pos位置删除 三.全部代码1.SeqList.h2.SeqList.c3.Test.c 一.介绍顺序表 顺序表是用…...
【嵌入式环境下linux内核及驱动学习笔记-(19)LCD驱动框架2-FrameBuffer】
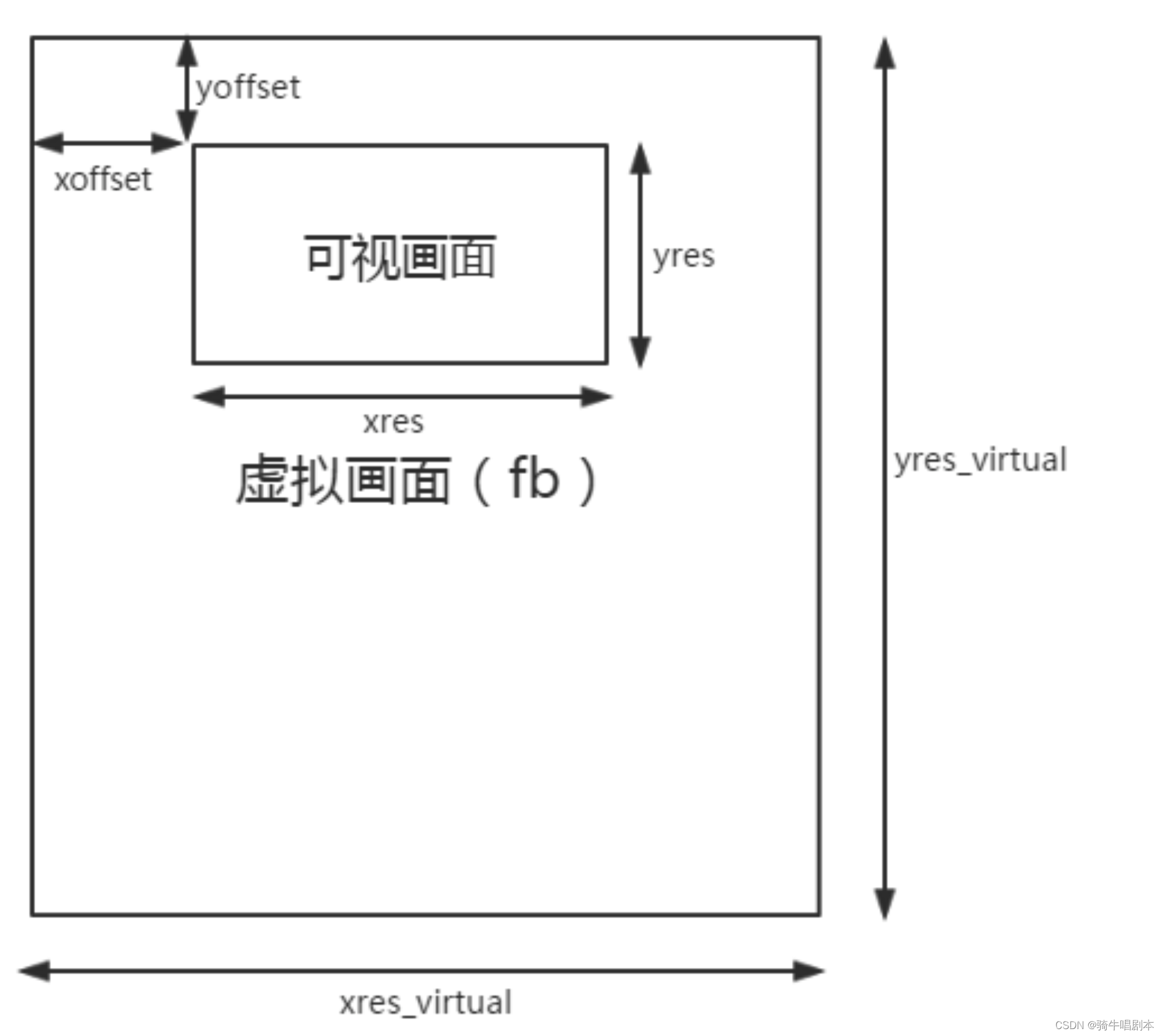
目录 1、 Frmebuffer(帧缓冲)操作介绍1.1 显示设备的抽象1.2 内存映像1.3 输出画面数据1.4 用户态下操作屏显1.4.1 用文件I / O 操作屏显1.4.2 mmap() 函数1.4.3 ioctl()函数1.4.5 用命令操作屏1.4.6 测试程序 2、Framebuffer总体框架2.1 框架要点2.2 fbmem.c分析2.…...
)
自己动手写数据库系统:实现一个小型SQL解释器(中)
我们接上节内容继续完成SQL解释器的代码解析工作。下面我们实现对update语句的解析,其语法如下: UpdateCmd -> INSERT | DELETE | MODIFY | CREATE Create -> CreateTable | CreateView | CreateIndex Insert -> INSERT INTO ID LEFT_PARAS Fie…...

HTML 与 XHTML 二者有什么区别
HTML 与 XHTML 二者有什么区别,你觉得应该使用哪一个并说出理由。 HTML 与 XHTML 之间的差别,主要分为功能上的差别和书写习惯的差别两方面。 关于功能上的差别,主要是 XHTML 可兼容各大浏览器、手机以及 PDA,并且浏览器也能快速正…...

3分钟上手Upscayl:免费AI图像放大工具的终极使用指南
3分钟上手Upscayl:免费AI图像放大工具的终极使用指南 【免费下载链接】upscayl 🆙 Upscayl - #1 Free and Open Source AI Image Upscaler for Linux, MacOS and Windows. 项目地址: https://gitcode.com/GitHub_Trending/up/upscayl 想要将模糊的…...
)
告别BurpSuite自带Intruder的龟速:用Turbo Intruder插件30倍速爆破验证码(附Python脚本)
突破传统限制:Turbo Intruder在验证码爆破中的高效实践 在渗透测试和安全评估工作中,验证码爆破是一个常见但极具挑战性的任务。传统的BurpSuite Intruder模块虽然功能强大,但在处理高并发请求时往往显得力不从心,速度成为制约效率…...

如何快速上手SillyTavern:新手完整入门指南
如何快速上手SillyTavern:新手完整入门指南 【免费下载链接】SillyTavern LLM Frontend for Power Users. 项目地址: https://gitcode.com/GitHub_Trending/si/SillyTavern 还在为复杂的LLM前端配置而烦恼吗?SillyTavern作为一款专为高级用户设计…...

深度解析causal-conv1d:CUDA加速的因果深度卷积专业指南
深度解析causal-conv1d:CUDA加速的因果深度卷积专业指南 【免费下载链接】causal-conv1d Causal depthwise conv1d in CUDA, with a PyTorch interface 项目地址: https://gitcode.com/gh_mirrors/ca/causal-conv1d causal-conv1d是一个专为时间序列数据优化…...

【免费下载】 STM32使用AD7799芯片读取AD值
STM32使用AD7799芯片读取AD值 【下载地址】STM32使用AD7799芯片读取AD值 本项目是基于STM32F103系列单片机,实现对AD7799高精度24位模数转换器(ADC)的数据采集。AD7799是一种高性能、低功耗的模拟到数字转换器,支持多种输入范围和…...

Perplexity视频搜索不精准?揭秘4类常见误操作及实时修正方案
更多请点击: https://codechina.net 第一章:Perplexity视频搜索不精准?揭秘4类常见误操作及实时修正方案 Perplexity 的视频搜索功能依赖于跨模态语义理解,但用户常因输入方式或上下文设置不当导致结果偏离预期。以下四类高频误操…...

用STM32F103和继电器DIY智能家居:低成本改造台灯/风扇的保姆级教程
用STM32F103和继电器DIY智能家居:低成本改造台灯/风扇的保姆级教程 智能家居的概念早已不再遥不可及,借助STM32F103这样的低成本微控制器和简单的继电器模块,任何人都能将普通家电升级为智能设备。本文将手把手教你如何将一个普通台灯或风扇改…...
)
告别卡顿!用WebRTC-Streamer在浏览器里丝滑播放海康/大华监控(附完整代码)
告别卡顿!用WebRTC-Streamer在浏览器里丝滑播放海康/大华监控(附完整代码) 监控视频的实时查看一直是许多开发者和运维人员头疼的问题。传统的解决方案如Flash早已被淘汰,而基于FLV.js的方案又常常面临延迟高、卡顿、标签页切换暂…...
)
Adams新手避坑指南:从Box到拉伸体,教你正确给几何模型‘赋予灵魂’(含质量设置)
Adams新手避坑指南:从几何体到动力学构件的关键转换 在Adams中创建几何模型时,许多新手用户会遇到一个令人困惑的现象:明明已经画好了精致的Box、Cylinder等几何体,但进行动力学仿真时,这些模型要么纹丝不动࿰…...

鲲鹏面对Agentic沙箱的思考与能力布局
Agent在今年迎来爆发式增长,传统云原生架构在Agent沙箱场景下面临启动慢、弹性差、资源冗余、隔离不足等五大痛点。鲲鹏沙箱以快照快启、共享Rootfs、超节点共享内存三大核心技术破局——将沙箱启动从分钟级压缩至毫秒级,通过写时复制(CoW&am…...