分步注册方式 编写驱动
作业:通过分步注册方式,编写LED灯驱动:(驱动文件mycdev.c 测试文件test.c 头文件head.h)
mycdev.c
#include <linux/init.h>
#include <linux/module.h>
#include <linux/fs.h>
#include <linux/io.h>
#include <linux/device.h>
#include <linux/cdev.h>
#include <linux/slab.h>
#include "head.h"
struct cdev *cdev;
unsigned int major=0;
unsigned int minor=0;
dev_t devno;
int major;
char kbuf[128] = {0};
gpio_t *vir_led1;
gpio_t *vir_led2;
gpio_t *vir_led3;
unsigned int *vir_rcc;
struct class *cls;
struct device *dev;
int mycdev_open(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);
return 0;
}
long mycdev_ioctl(struct file *file,unsigned int cmd, unsigned long arg)
{
int which;
int ret = copy_from_user(&which,(unsigned int *)arg,4);
if(ret)
{
printk("copy_from_user err\n");
return ret;
}
switch (cmd)
{
case LED_ON://which LED is turned on
switch(which)
{
case 1: //LED1
vir_led1->ODR |= (0x1 << 10);
break;
case 2: //LED2
vir_led2->ODR |= (0x1 << 10);
break;
case 3: //LED3
vir_led3->ODR |= (0x1 << 8);
break;
}
break;
case LED_OFF: //which LED is turned off
switch (which)
{
case 1:
vir_led1->ODR &= (~(0x1 << 10));
break;
case 2:
vir_led2->ODR &= (~(0X1 << 10));
break;
case 3:
vir_led3->ODR &= (~(0X1 << 8));
break;
}
break;
return 0;
}
}
int all_leds_init(void)
{
vir_led1 = ioremap(PHY_LED1_ADDR, sizeof(gpio_t));
if (vir_led1 == NULL)
{
printk("ioremap filed:%d\n", __LINE__);
return -ENOMEM;
}
vir_led2 = ioremap(PHY_LED2_ADDR, sizeof(gpio_t));
if (vir_led2 == NULL)
{
printk("ioremap filed:%d\n", __LINE__);
return -ENOMEM;
}
vir_led3 = vir_led1;
vir_rcc = ioremap(PHY_RCC_ADDR, 4);
if (vir_rcc == NULL)
{
printk("ioremap filed:%d\n", __LINE__);
return -ENOMEM;
}
printk("ioremap success\n");
// init regestors
(*vir_rcc) |= (3 << 4);
vir_led1->MODER &= (~(3 << 20));
vir_led1->MODER |= (1 << 20);
vir_led1->ODR &= (~(1 << 10));
vir_led2->MODER &= (~(3 << 20));
vir_led2->MODER |= (1 << 20);
vir_led1->MODER &= (~(3 << 16));
vir_led1->MODER |= (1 << 16);
vir_led1->ODR &= (~(1 << 8));
printk("init regestors success\n");
return 0;
}
ssize_t mycdev_read(struct file *file, char *ubuf, size_t size, loff_t *lof)
{
printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);
int ret;
ret=copy_to_user(ubuf,kbuf,size);
if(ret)
{
printk("copy_to_user filad\n");
return ret;
}
return 0;
}
int mycdev_close(struct inode *inode, struct file *file)
{
printk("%s:%s:%d\n",__FILE__,__func__,__LINE__);
return 0;
}
struct file_operations fops = {
.open=mycdev_open,
.read=mycdev_read,
.write=mycdev_write,
.release=mycdev_close,
};
static int __init mycdev_init(void)
{
int ret;
//cdev allocate space
cdev=cdev_alloc();
if(cdev==NULL)
{
printk("cdev allocate space failed\n");
ret=-EFAULT;
goto OUT1;
}
printk("cdev allocate space success\n");
cdev_init(cdev,&fops);
if(major>0)
{
ret=register_chrdev_region(MKDEV(major,minor),3,"mycdev");
if(ret)
{
printk("apply for cdev Number failed\n");
goto OUT2;
}
}
else
{
ret=alloc_chrdev_region(&devno,minor,3,"mycdev");
if(ret)
{
printk("apply for cdev Number failed\n");
goto OUT2;
}
minor=MINOR(devno);//minor of cdev Number
major=MAJOR(devno);//major of cdev Number
}
printk("cdev Number:major=%d\n", major);
printk("apply for cdev Number success\n");
ret=cdev_add(cdev,MKDEV(major,minor),3);
if(ret)
{
printk("regest cdev failed\n");
goto OUT3;
}
printk("regest cdev sucess\n");
cls=class_create(THIS_MODULE,"mycdev");
if(IS_ERR(cls))
{
printk("submit catalog list failed\n");
ret=-PTR_ERR(cls);
goto OUT4;
}
printk("submit catalog list success\n");
int i;
for(i=0;i<3;i++)
{
dev=device_create(cls,NULL,MKDEV(major,i),NULL,"mycdev%d",i);
if(IS_ERR(dev))
{
printk("submit cdev inod failed\n");
ret=-PTR_ERR(dev);
goto OUT5;
}
}
printk("submit cdev inod success\n");
all_leds_init();
return 0;
OUT5:
for(--i;i>=0;i--)
{
device_destroy(cls,MKDEV(major,i));
}
class_destroy(cls);
OUT4:
cdev_del(cdev);
OUT3:
unregister_chrdev_region(MKDEV(major,minor),3);
OUT2:
kfree(cdev);
OUT1:
return ret;
}
static void __exit mycdev_exit(void)
{
iounmap(vir_led1);
iounmap(vir_led2);
iounmap(vir_rcc);
int i;
for(i=0;i<3;i++)
{
device_destroy(cls,MKDEV(major,i));
}
class_destroy(cls);
cdev_del(cdev);
unregister_chrdev_region(MKDEV(major,minor),3);
kfree(cdev);
}
module_init(mycdev_init);
module_exit(mycdev_exit);
MODULE_LICENSE("GPL");
test.c
#include<stdlib.h>
#include<stdio.h>
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include<unistd.h>
#include<string.h>
#include<sys/ioctl.h>
#include"head.h"
int main(int argc, char const *argv[])
{
char buf[128]={0};
int a,b;
int fd=open("/dev/mycdev0",O_RDWR);
if(fd<0)
{
printf("open cdev failed\n");
exit(-1);
}
while(1)
{
printf("turn on or turn off:1(on)0(off)>)");
scanf("%d",&a);
printf("select the LED:1(LED1) 2(LED2) 3(LED3)>");
scanf("%d",&b);
switch(a)
{
case 1:
ioctl(fd,LED_ON,&b);
break;
case 0:
ioctl(fd,LED_OFF,&b);
break;
}
}
close(fd);
return 0;
}
head.h
#ifndef __HEAD_H__
#define __HEAD_H__
typedef struct{
unsigned int MODER;
unsigned int OTYPER;
unsigned int OSPEEDR;
unsigned int PUPDR;
unsigned int IDR;
unsigned int ODR;
}gpio_t;
#define PHY_LED1_ADDR 0X50006000
#define PHY_LED2_ADDR 0X50007000
#define PHY_LED3_ADDR 0X50006000
#define PHY_RCC_ADDR 0X50000A28
#define LED_ON _IOW('l',1,int)
#define LED_OFF _IOW('l',0,int)
#endif
相关文章:

分步注册方式 编写驱动
作业:通过分步注册方式,编写LED灯驱动:(驱动文件mycdev.c 测试文件test.c 头文件head.h) mycdev.c #include <linux/init.h> #include <linux/module.h> #include <linux/fs.h> #include <linux/io.h> …...

repmgr出现双主,并且时间线分叉,删除了最新的时间线节点
遇到的问题如下: 2023-08-17 20:24:21.566 CST [1556001] LOG: database system was interrupted; last known up at 2023-08-17 20:21:41 CST 2023-08-17 20:24:21.770 CST [1556001] LOG: restored log file "00000009.history" from archive cp: 无法…...

ThinkPHP中实现IP地址定位
在网站开发中,我们经常需要获取用户的地理位置信息以提供个性化的服务。一种常见的方法是通过IP地址定位。在本文中,我们将介绍如何在ThinkPHP框架中实现IP地址定位。 一、IP地址定位的基本原理 IP地址是Internet上的设备在网络中的标识符。每个设备都有…...

使用Python批量将Word文件转为PDF文件
说明:在使用Minio服务器时,无法对word文件预览,如果有需要的话,可以将word文件转为pdf文件,再存储到Minio中,本文介绍如何批量将word文件,转为pdf格式的文件; 安装库 首先ÿ…...

XDR解决方案成为了新的安全趋势
和当今指数倍增长的安全数据相比,安全人才的短缺带来了潜在的风险。几乎所有的公司,无论规模大小,在安全资源能力上都有限,需要过滤各种告警才能将分析量保持在可接受范围。但这样一来,潜在的威胁线索就可能被埋没&…...

001-Nacos 服务注册
目录 Nacos介绍注册中心架构面临问题源码分析实例注册-接口实例注册-入口实例注册-创建一个(Nacos)Service实例注册-注册(Nacos)Service Nacos 介绍 Dynamic Naming and Configuration Service 动态的命名和配置服务 反正可以实现注册中心的功能 注册中心架构 服务提供者 …...
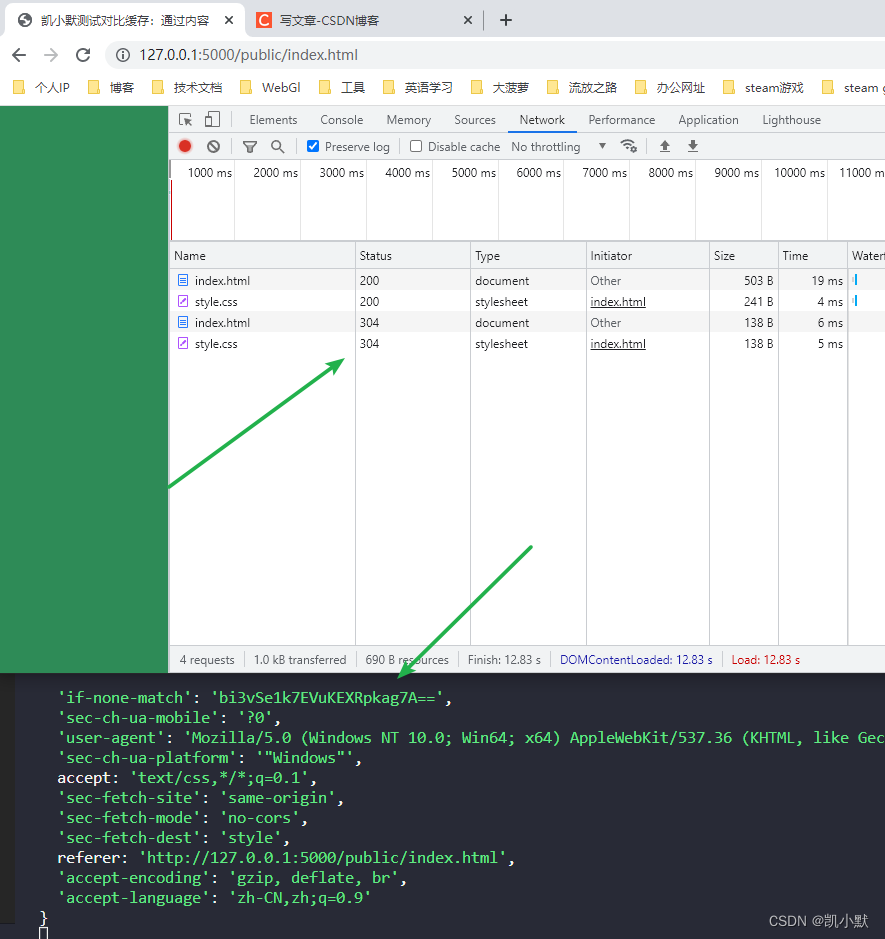
71 # 协商缓存的配置:通过内容
对比(协商)缓存 比较一下再去决定是用缓存还是重新获取数据,这样会减少网络请求,提高性能。 对比缓存的工作原理 客户端第一次请求服务器的时候,服务器会把数据进行缓存,同时会生成一个缓存标识符&#…...

【服务器】Strace显示后台进程输出
今天有小朋友遇到一个问题 她想把2331509和2854637这两个进程调到前台来,以便于在当前shell查看这两个python进程的实时输出 我第一反应是用jobs -l然后fg (参考这里) 但是发现jobs -l根本没有输出: 原因是jobs看的是当前ses…...

centos如何安装libssl-dev libsdl-dev libavcodec-dev libavutil-dev ffmpeg
在 CentOS 系统上安装这些包可以按照以下步骤进行: 打开终端,使用 root 或具有管理员权限的用户登录。 使用以下命令安装 libssl-dev 包: yum install openssl-devel使用以下命令安装 libsdl-dev 包: yum install SDL-devel使用以…...

2022年12月 C/C++(二级)真题解析#中国电子学会#全国青少年软件编程等级考试
第1题:数组逆序重放 将一个数组中的值按逆序重新存放。例如,原来的顺序为8,6,5,4,1。要求改为1,4,5,6,8。 输入 输入为两行:第一行数组中元素的个数n(1 输出 输出为一行:输出逆序后数组的整数,每两个整数之间用空格分隔。 样例输入 5 8 6 5 4 1 样例输出 1 4 5 6 8 以下是…...
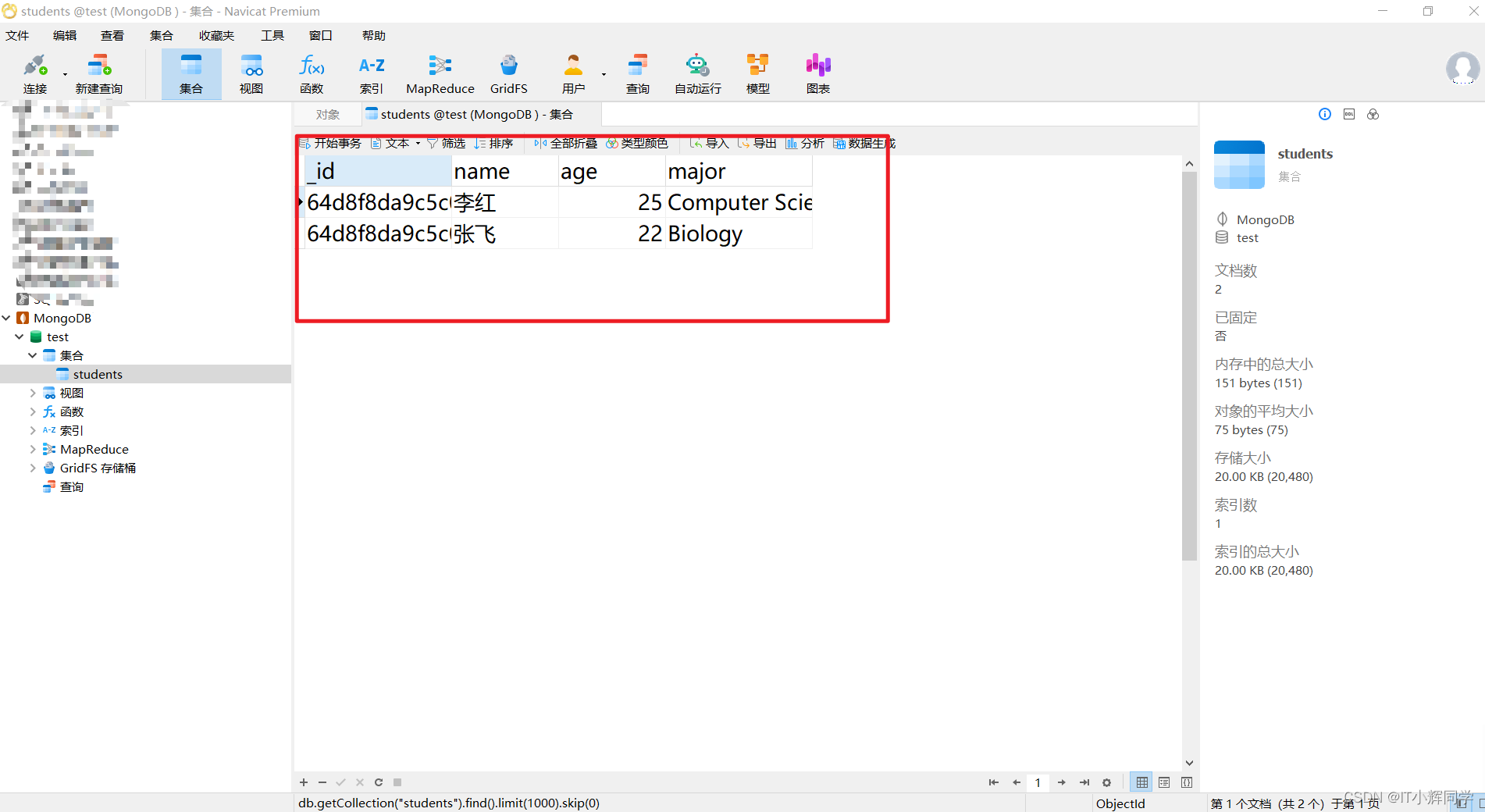
详谈MongoDB的那些事
概念区分 什么是关系型数据库 关系型数据库(Relational Database)是一种基于关系模型的数据库管理系统(DBMS)。在关系型数据库中,数据以表格的形式存储,表格由行和列组成,行表示数据记录&…...
企业电子招投标采购系统源码之电子招投标的组成 tbms
功能模块: 待办消息,招标公告,中标公告,信息发布 描述: 全过程数字化采购管理,打造从供应商管理到采购招投标、采购合同、采购执行的全过程数字化管理。通供应商门户具备内外协同的能力,为…...

Android 13 添加自定义分区,恢复出厂设置不被清除
需求: 客户有些文件或数据,需要做得恢复出厂设置还存在,故需新增一个分区存储客户数据。 要求: a) 分区大小为50M b) 应用层可读可写 c) 恢复出厂设置后不会被清除 d) 不需要打包.img e) 不影响OTA升级 缺点: 1).通过代码在分区创建目录和文件,会涉及到SeLinux权限的修…...
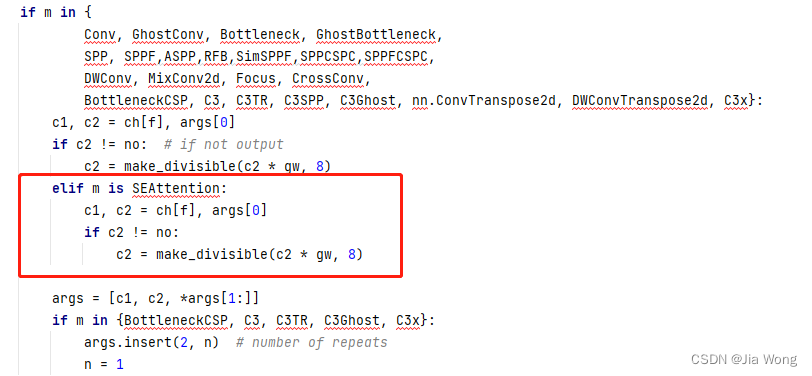
改进YOLO系列:1.添加SE注意力机制
添加SE注意力机制 1. SE注意力机制论文2. SE注意力机制原理3. SE注意力机制的配置3.1common.py配置3.2yolo.py配置3.3yaml文件配置 1. SE注意力机制论文 论文题目:Squee…...
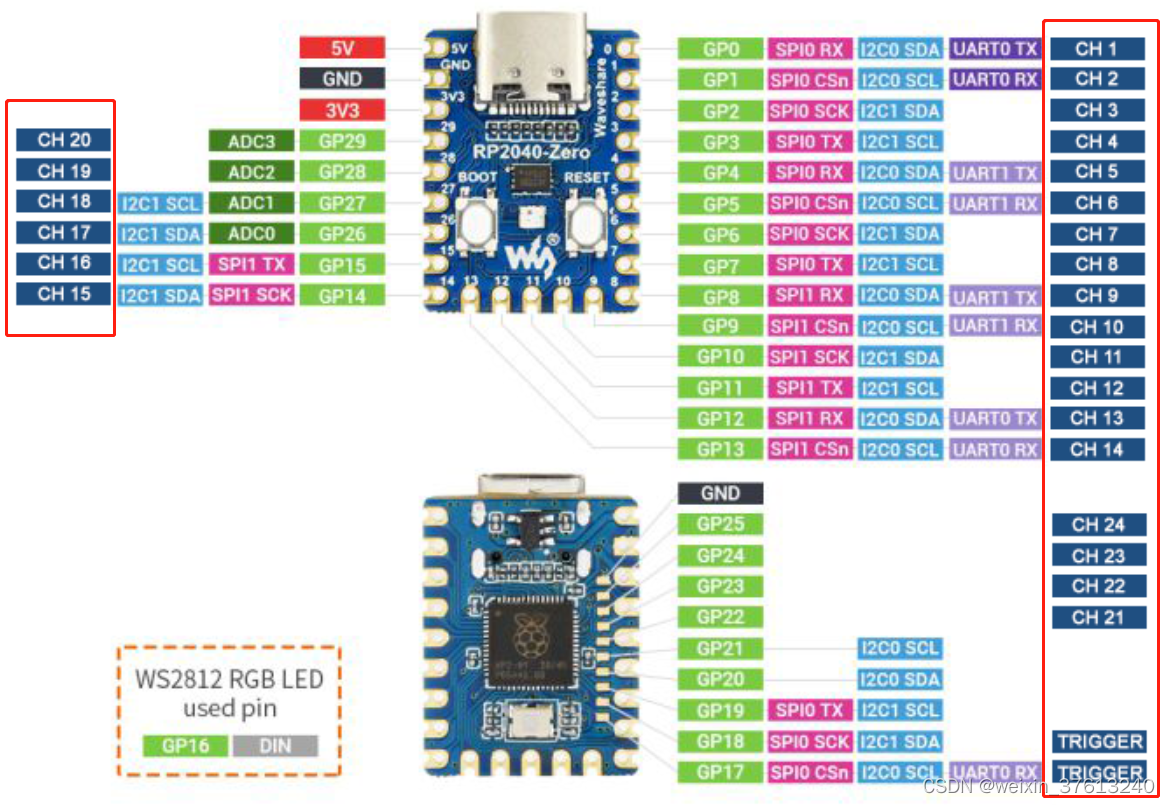
RP2040开发板自制树莓派逻辑分析仪
目录 前言 1 准备工作和前提条件 1.1 Raspberry Pi Pico RP2040板子一个 1.2 Firmware-LogicAnalyzer-5.0.0.0-PICO.uf2固件 1.3 LogicAnalyzer-5.0.0.0-win-x64软件 2 操作指南 2.1 按住Raspberry Pi Pico开发板的BOOTSEL按键,再接上USB接口到电脑 2.2 刷入…...

git clone -b与git pull origin <branch_name>的区别
git clone -b 和 git pull origin <branch_name> 都是用于在 Git 中操作分支的命令,但它们有不同的用途和行为。 git clone -b 这是在克隆仓库时指定要克隆的特定分支的命令。它用于在克隆一个仓库的同时指定要克隆的分支。例如,如果你只想克隆一…...

中期国际:MT4数据挖掘与分析方法:以数据为导向,制定有效的交易策略
在金融市场中,制定有效的交易策略是成功交易的关键。而要制定一份可靠的交易策略,数据挖掘与分析方法是不可或缺的工具。本文将介绍如何以数据为导向,利用MT4进行数据挖掘与分析,从而制定有效的交易策略。 首先,我们需…...
之bzip2)
Linux命令(70)之bzip2
linux命令之bzip2 1.bzip2介绍 linux命令bzip2是用来压缩或解压缩文件名后缀为".bz2"的文件 2.bzip2用法 bzip2 [参数] filename bzip2常用参数 参数说明-d解压缩文件-t测试压缩文件是否正确-k压缩后,保留源文件-z强制压缩-f强制覆盖已存在的文件-v显…...
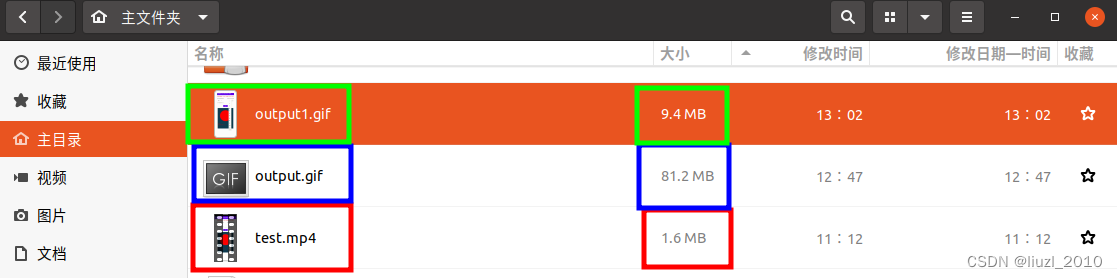
ubuntu下gif动态图片的制作
Gif图片比视频小, 比静态JPG图片形象生动, 更适用于产品展示和步骤演示等。各种各样的gif动图为大家交流提供很大的乐趣. 这里简单介绍ubuntu系统下gif图的制作。 一、工具安装: kazam和ffmpeg kazam是linux下的一款简单但是功能强大的屏幕录制工具. 它可录制声音并选择全屏录…...
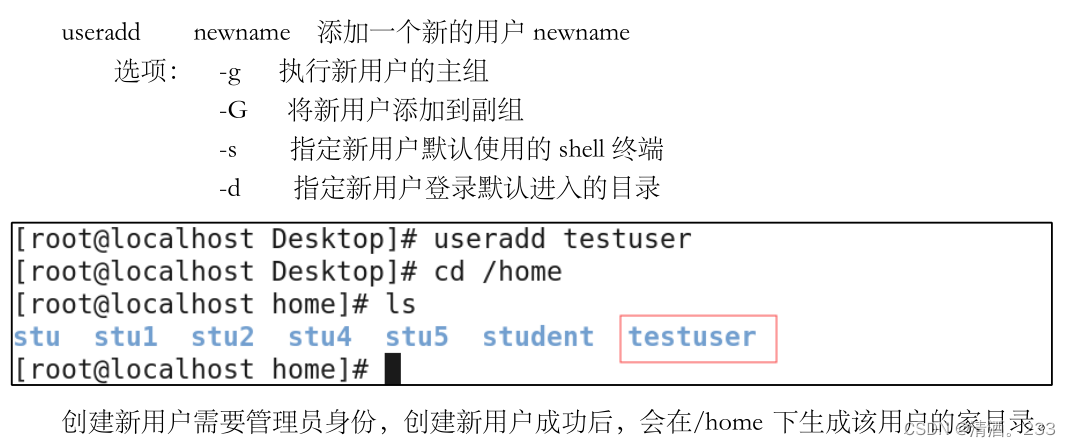
56.linux 进程管理命令和用户管理命令
目录 一、进程管理命令 1.ps 2.pstree 3.kill 4.pkill 5.&后台运行程序 6.jobs 7.fg bg 8.top 二、用户管理命令 1.系统存储用户信息的文件 2.添加新用户 3.修改用户密码 4.删除用户 一、进程管理命令 1.ps 用于查看当前系统中运行的进程信息。它可以…...
)
软考高项·信息系统项目管理师 备考攻略(作文专题)
作者经历:改机考后第一年通过。第一次考试仅通过选择题;第二次考试作文未通过;第三次考试(机考)作文顺利通过,三科全过。欢迎关注, 后续会逐步推出更多备考攻略一、我的三次考试经历 第一次考试:…...

我用9个AI Agent,从0到1复刻了一个完整的Claude Code
起因4月初,Claude Code的源码泄露了。拿到源码之后通读了一遍,大概1,900个文件、512K行TypeScript代码。看完之后就有了一个想法:能不能用Go把它重写一遍?不是写个Demo玩玩,而是把所有功能都搬过来——CLI入口、LLM查询…...

告别网盘限速!八大平台直链解析工具终极指南
告别网盘限速!八大平台直链解析工具终极指南 【免费下载链接】Online-disk-direct-link-download-assistant 一个基于 JavaScript 的网盘文件下载地址获取工具。基于【网盘直链下载助手】修改 ,支持 百度网盘 / 阿里云盘 / 中国移动云盘 / 天翼云盘 / 迅…...

第二十七章 灾备与演练:生产级数据库的增量备份、异地容灾与快速恢复预案
第二十七章 灾备与演练:生产级数据库的增量备份、异地容灾与快速恢复预案 在煤化工这样的大型连续性生产企业中,数据库不仅仅是存储代码和日志的地方,它是整个工厂的数字心脏。一次看似短暂的数据库宕机,在极客眼中可能只是 systemctl restart 的几秒钟,但在厂长眼中,那…...

终极ARC-AGI测试功能扩展指南:从零开始自定义AI推理任务
终极ARC-AGI测试功能扩展指南:从零开始自定义AI推理任务 【免费下载链接】ARC-AGI The Abstraction and Reasoning Corpus 项目地址: https://gitcode.com/GitHub_Trending/ar/ARC-AGI 欢迎来到ARC-AGI(Abstraction and Reasoning Corpus for Art…...

超级千问语音设计世界应用案例:快速生成短视频配音与游戏角色语音
超级千问语音设计世界应用案例:快速生成短视频配音与游戏角色语音 1. 引言:当语音合成遇上像素冒险 在内容创作领域,声音设计往往是最容易被忽视却又至关重要的环节。无论是短视频创作者需要快速生成旁白,还是独立游戏开发者需要…...

GitFS与CI/CD集成:如何实现持续部署的版本控制
GitFS与CI/CD集成:如何实现持续部署的版本控制 【免费下载链接】gitfs Version controlled file system 项目地址: https://gitcode.com/gh_mirrors/gi/gitfs GitFS作为一个版本控制文件系统,为开发者提供了将Git仓库直接挂载为文件系统的能力&am…...

PCA9505/06工业级I²C IO扩展驱动设计与实战
1. PCA9505/06 库概述:面向工业级IC端口扩展的底层驱动设计PCA9505与PCA9506是NXP推出的40位IC总线IO扩展器,专为资源受限但需高密度数字信号管理的嵌入式系统设计。该库并非简单封装Arduino Wire接口的轻量级适配层,而是一套具备完整寄存器映…...

RVC变声器终极教程:10分钟训练高质量AI音色模型完全指南
RVC变声器终极教程:10分钟训练高质量AI音色模型完全指南 【免费下载链接】Retrieval-based-Voice-Conversion-WebUI Easily train a good VC model with voice data < 10 mins! 项目地址: https://gitcode.com/GitHub_Trending/re/Retrieval-based-Voice-Conve…...
)
【仅限首批200位AI平台工程师】:手把手搭建支持LoRA热切换+Embedding降维的实时告警管道(含开源eBPF探针源码)
第一章:AI原生软件研发监控告警体系搭建 2026奇点智能技术大会(https://ml-summit.org) AI原生软件具备动态推理路径、模型权重热更新、多模态输入响应等特性,传统基于静态服务拓扑的监控体系难以捕获其运行时语义异常。构建面向AI原生应用的监控告警体…...