FPGA: RS译码仿真过程
FPGA: RS译码仿真过程
在上一篇中记录了在FPGA中利用RS编码IP核完成信道编码的仿真过程,这篇记录利用译码IP核进行RS解码的仿真过程,带有程序和结果。
1. 开始准备
在进行解码的过程时,同时利用上一篇中的MATLAB仿真程序和编码过程,IP核的下载是同样的地址。解码过程中的参数设置正好对应编码的过程。对0-15的自然数通过RS编码得到的数据进行解码,其中m=4,n=15,k=3,ploy=19。
2. RS译码IP核
RS译码IP核全名Reed-Solomon Decoder,具体细节可以参照PDF技术文档,首先看IP核参数设置。
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-R32PpUta-1692190030739)(1.png “rs解码IP核设置1”)]
已经通过RS编码IP核完成了编码的仿真过程,并且通过MATLAB对比对结果进行了验证,所以这个第一个页码的参数直接参照如图设置就可以,与编码是一一对应的,没有什么需要特别的说明。
在下面的Variable Check Symbol Options不需要勾选。

在第二个参数设置界面,都不需要勾选,勾选的话译码输出的结果会带有校验的数据。

在第三个参数设置界面中,把Reset选项勾选上。

完成这个IP核的设置。
补充
为了方便利用仿真过程中的译码过程,在之前完成编码过程后添加了一个fifo方便进行数据处理和信号控制,其中的fifoIP核的参数设置为如下。



这个fifo根据需要设置即可,主要是为了编码之后的数据和译码过程使用控制方便。
3. 代码编写
译码过程是在编码基础上添加的,编码过程的参数没有变化,对0-15的数据进行编码,然后再进行译码,在编码和译码过程中间有一个fifo,其中fifo的读控制信号利用empty信号和译码IP的s_ready信号,fifo的写信号编码信号的输出valid信号。详细的逻辑看代码。
代码如下rs_test.v
`timescale 1ns / 1psmodule rs_test(input clk, //时钟input rst_n // 复位 高电平复位
// input [7:0] data_in, // 输入的待编码数据
// output [7:0] dataout // 输出的解码数据);wire rs_encode_input_tready; // 编码输入准备信号
reg rs_encode_input_tvalid_reg; // 编码输入有效信号
reg rs_encode_input_tready_reg;
wire rs_encode_input_tlast;
reg rs_encode_input_tlast_reg;
wire[7:0] rs_encode_data;
wire rs_encode_output_tvalid;
wire rs_encode_output_tlast;
wire rs_enocde_output_tready;
reg rs_enocde_output_tready_reg;parameter K = 3; // 对应MATLAB仿真中的k和n的值,这个在IP核设置中已经有体现
parameter N = 4; //
parameter L = 15; // 编码之后的数据长度reg [3:0] datain_num; // 每一组编码的原始数据个数
reg [5:0] dataout_num; //输出编码数据的个数wire fifo_full; // fifo 满信号// 设计输入数据
reg [3:0] datain;
always@(posedge clk)beginif(~rst_n)begindatain <= 4'b0;rs_encode_input_tready_reg <= 1'b0;rs_encode_input_tvalid_reg <= 1'b0;rs_encode_input_tlast_reg <= 1'b0;rs_enocde_output_tready_reg <= 1'b0;datain_num <= 4'b0;endelse beginrs_encode_input_tready_reg <= rs_encode_input_tready;if(fifo_full==1'b1)beginrs_encode_input_tvalid_reg <= 1'b0;endelse beginrs_encode_input_tvalid_reg <= 1'b1;endif(rs_encode_input_tready == 1'b1 && rs_encode_input_tvalid_reg == 1'b1)begin // 在ready 和valid信号都有效的时候才开始编码数据,可以在这里计数编码的个数。datain <= datain + 4'b1;datain_num <= 4'b1 + datain_num;rs_enocde_output_tready_reg <= 1'b1;endelse beginendend
end// 根据每一组编码的组数来确定数据顺序 控制最后一个tlast信号。
always@(posedge clk)beginif(~rst_n)beginrs_encode_input_tlast_reg <= 1'b0; // 这个信号是需要在一组中的最后一个数据时候信号处于高电平 和k的大小对应endelse beginif(datain_num >= K)beginrs_encode_input_tlast_reg <= 1'b1;endelse beginrs_encode_input_tlast_reg <= 1'b0; //然后重新置零endend
endwire [3:0] data_in;
assign data_in = datain;rs_encoder_0 rs_encoder_0_ins ( //latency 5clk.aclk(clk), // input wire aclk.aresetn(rst_n), // input wire aresetn.s_axis_input_tdata(data_in), // input wire [7 : 0] s_axis_input_tdata.s_axis_input_tvalid(rs_encode_input_tvalid_reg), // input wire s_axis_input_tvalid.s_axis_input_tready(rs_encode_input_tready), // output wire s_axis_input_tready.s_axis_input_tlast(rs_encode_input_tlast_reg), // input wire s_axis_input_tlast.m_axis_output_tdata(rs_encode_data), // output wire [7 : 0] m_axis_output_tdata.m_axis_output_tvalid(rs_encode_output_tvalid), // output wire m_axis_output_tvalid.m_axis_output_tready(rs_enocde_output_tready_reg), // input wire m_axis_output_tready.m_axis_output_tlast(rs_encode_output_tlast) // output wire m_axis_output_tlast
);// 通过编码模块输出的valid信号和ready信号来记录输出数据的个数
always@(posedge clk)beginif(~rst_n)begindataout_num <= 6'b0;endelse beginif(rs_encode_output_tvalid==1'b1 && rs_enocde_output_tready_reg==1'b1)begindataout_num <= dataout_num + 6'b1;if(dataout_num >= 6'd15)begindataout_num <= 6'b0;endendelse beginendend
end// rs 译码过程
// 在编码之后的数据添加一个fifo 方便管理valid信号和ready信号,减少耦合同时可以比配位宽
wire fifo_empty;
wire fifo_rd_en;wire[3:0] fifo_data;
reg fifo_flag; // 这个是用来标致第一次从fifo中读取数据的过程wire [7:0] rs_decode_data_temp;
wire [3:0] rs_decode_data;
//in
wire rs_decode_data_s_ready;
wire rs_decode_data_s_valid;
reg rs_decode_data_s_valid_reg; // 去掉fifo 输出的一个时钟延迟
reg rs_decode_data_s_tlast_reg;
assign fifo_rd_en = rs_decode_data_s_ready && (!fifo_empty);
// out
wire rs_decode_data_m_valid;
wire rs_decode_data_m_tlast;
wire rs_decode_data_m_ready;
// stat
wire [7:0] rs_decode_stat_data;
//wire rs_decode_stat_ready;
wire rs_decode_stat_valid;always@(posedge clk)beginif(~rst_n)beginfifo_flag <= 1'b0;endelse beginif(fifo_rd_en==1'b1)beginfifo_flag <= 1'b1;endend
endalways@(posedge clk)beginif(~rst_n)beginrs_decode_data_s_valid_reg <= 1'b0;endelse beginrs_decode_data_s_valid_reg <= fifo_rd_en;end
endfifo_generator_0 fifo_ins( // 这个输出有1clk延迟.clk(clk), // input wire clk.srst(~rst_n), // input wire srst.din(rs_encode_data[3:0]), // input wire [3 : 0] din.wr_en(rs_encode_output_tvalid), // input wire wr_en.rd_en(fifo_rd_en), // input wire rd_en.dout(fifo_data), // output wire [3 : 0] dout .full(fifo_full), // output wire full.empty(fifo_empty) // output wire empty
);
// 输入编码中的有效信号
assign rs_decode_data_s_valid = (fifo_flag==1'b1)?fifo_rd_en:rs_decode_data_s_valid_reg; // 在第一次读取的时候 信号跟随reg信号,之后跟随en信号
reg[5:0] decode_num;
always@(posedge clk)beginif(~rst_n)begindecode_num = 6'b1;endelse beginif(rs_decode_data_s_valid==1'b1)begindecode_num <= decode_num + 6'b1;if(decode_num >= 6'd14)begindecode_num <= 6'b0;endendend
end
// 控制tlast信号
always@(posedge clk)beginif(~rst_n)beginrs_decode_data_s_tlast_reg <= 1'b0;endelse begin //当解码输入进入的数据为一组时,拉高tlast信号;if(decode_num >= 6'd14)beginrs_decode_data_s_tlast_reg <= 1'b1;endelse beginrs_decode_data_s_tlast_reg <= 1'b0;endend
endrs_decoder_0 rs_decoder_0_ins (.aclk(clk), // input wire aclk.aresetn(rst_n), // input wire aresetn.s_axis_input_tdata(fifo_data), // input wire [7 : 0] s_axis_input_tdata.s_axis_input_tvalid(rs_decode_data_s_valid), // input wire s_axis_input_tvalid.s_axis_input_tlast(rs_decode_data_s_tlast_reg), // input wire s_axis_input_tlast.s_axis_input_tready(rs_decode_data_s_ready), // output wire s_axis_input_tready.m_axis_output_tdata(rs_decode_data_temp), // output wire [7 : 0] m_axis_output_tdata.m_axis_output_tvalid(rs_decode_data_m_valid), // output wire m_axis_output_tvalid.m_axis_output_tready(1'b1), // input wire m_axis_output_tready.m_axis_output_tlast(rs_decode_data_m_tlast), // output wire m_axis_output_tlast.m_axis_stat_tdata(rs_decode_stat_data), // output wire [7 : 0] m_axis_stat_tdata.m_axis_stat_tvalid(rs_decode_stat_valid), // output wire m_axis_stat_tvalid.m_axis_stat_tready(1'b1) // input wire m_axis_stat_tready
);assign rs_decode_data = rs_decode_data_temp[3:0];endmodule4. 仿真测试
测试程序的testbench文件和之前保持一致,只需要把实例化的模块名字更改即可。
`timescale 1ns / 1ps
module rs_tb();reg l_clk;
reg rst_n;rs_test rs_test_ins(.clk(l_clk), //时钟.rst_n(rst_n) // 复位 高电平复位);
initial l_clk = 1;
always #5 l_clk= !l_clk; //15.625 initial beginrst_n <= 0;#40;rst_n <= 1;#320;//#50000000;#320;
// $stop;
end
endmodule
然后进入仿真过程,对照时序查看结果。

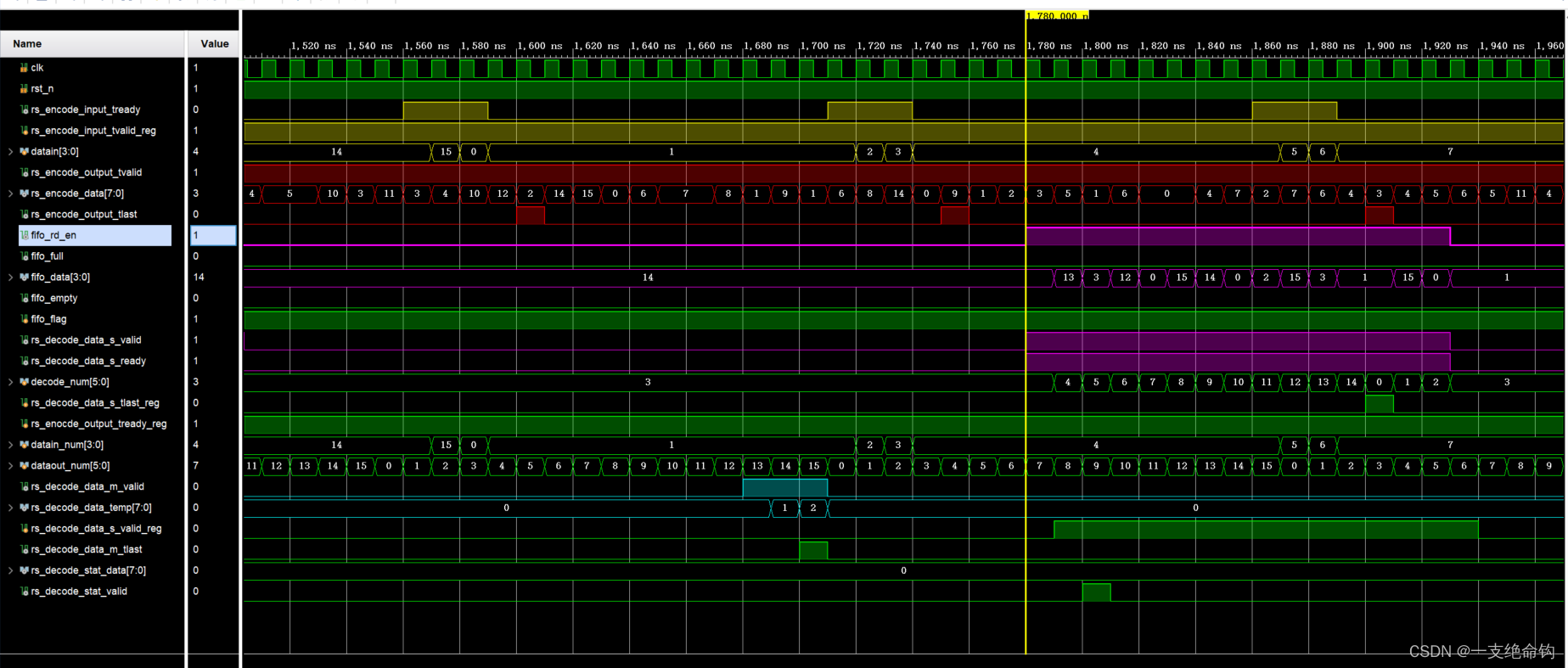
首先看试验大图,其中的蓝色线是解码之后的数据,从数据结果中可以看出每个数据间隔3,正好是编码之前的结果,拉开蓝色线就可以看到具体的数值。因为译码也是存在延时的,所以看起来数据会滞后,蓝色数据线的m_valid信号对应输出数据有效信号。
这里面有需要注意的地方,首先看仿真结果的前面部分。

这是fifo_rd_en有效的第一段,由于有1个clk的时钟延迟,所以把有效信号rs_decode_data_s_valid信号需要延迟一个clk,然后看接下来的fifo_rd_en第二个周期,需要把rs_decode_data_s_valid信号和fifo_rd_en信号对齐,否则会丢一个数据,后面的和第二个周期相同,只有第一个需要延迟一个周期,这个在程序中通过fifo_flag判断是不是第一个周期。
至此完成了译码的过程。
相关文章:
FPGA: RS译码仿真过程
FPGA: RS译码仿真过程 在上一篇中记录了在FPGA中利用RS编码IP核完成信道编码的仿真过程,这篇记录利用译码IP核进行RS解码的仿真过程,带有程序和结果。 1. 开始准备 在进行解码的过程时,同时利用上一篇中的MATLAB仿真程序和编码过程&#x…...

PostgreSQL 查询数据表、视图信息
--获得指定schema范围内的所有表和视图的列表,可指定一个排除表前缀模式with param as (select public,iit as schema_name,db2g% as exclude_pattern),base_info as (--获得所有基表select pg_namespace.nspname as schema_name, a.relname as tbl_name ,TBL as tb…...
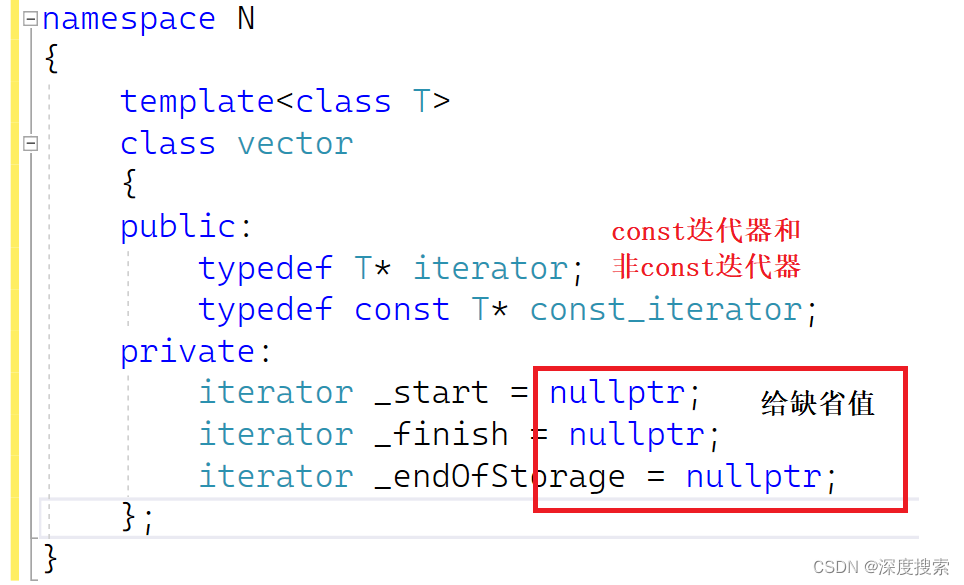
手撕vector容器
一、vector容器的介绍 vector是表示可变大小数组的序列容器。就像数组一样,vector也采用的连续存储空间来存储元素,但是又不像数组,它的大小是可以动态改变的,而且它的大小会被容器自动处理。 总结:vector是一个动态…...
PyMuPDF`库实现PDF旋转功能
本文介绍了一个简单的Python应用程序,用于将PDF文件转换为旋转90度的PDF文件。主要用于csdn网站中导出的博客pdf是横向的,看起来不是很方便,才想到用python编制一个将pdf从横向转为纵向的功能。 功能 该PDF转换工具具有以下功能:…...
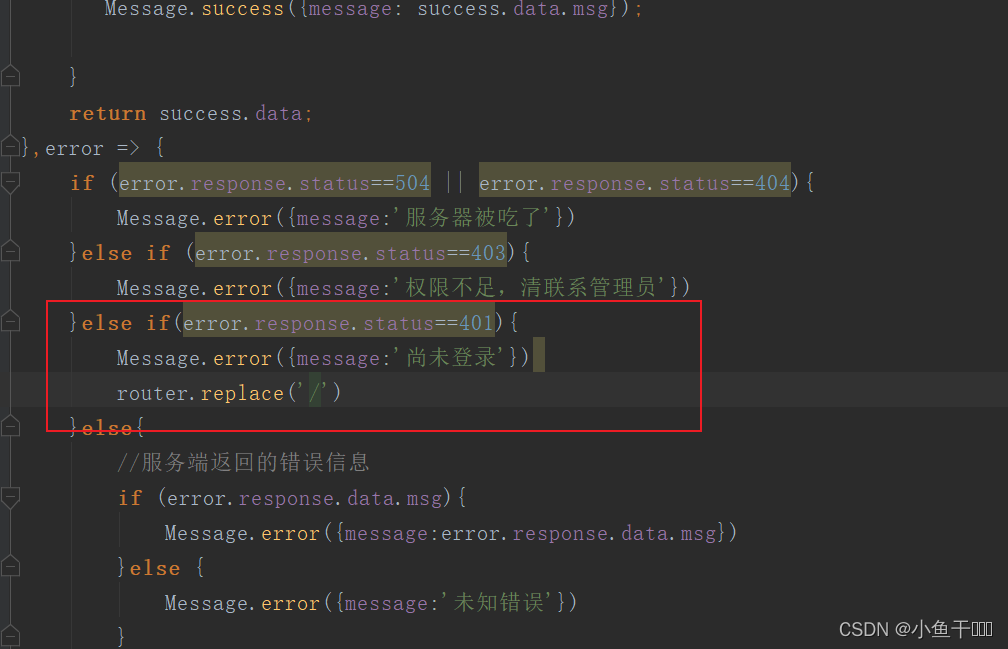
微人事 登录问题完善
重启服务端的时候,发现前端页面会操作不了,这样后端session会失效,我们就需要让页面重新跳转到登录页 springsecurity配置类后端配置 前端拦截器进行拦截跳转...

【业务功能篇64】安装docker容器,在docker上安装mysql
docker教程: https://www.runoob.com/docker/docker-tutorial.html卸载docker 较旧的 Docker 版本称为 docker 或 docker-engine 。如果已安装这些程序,请卸载它们以及相关的依赖项。 yum remove docker docker-client docker-client-latest docker-co…...

MyBatis的基本概念和核心组件
MyBatis的基本概念 MyBatis 是一款优秀的持久层框架,它支持定制化 SQL、存储过程以及高级映射。MyBatis 避免了几乎所有的 JDBC 代码和手动设置参数以及获取结果集。MyBatis 可以使用简单的 XML 或注解来配置和映射原生信息,将接口和 Java 的 POJOs(Pla…...

sql update执行返回0,能否判断数据不存在
答案:不能。 update执行返回0的情况 1、没有找到需要更新的数据,就是这条记录不存在 例如:where后面的条件是id0,那这条记录肯定是不存在的,返回结果是0 2、更新时的数据和要更新的数据完全一致时 例如:更…...
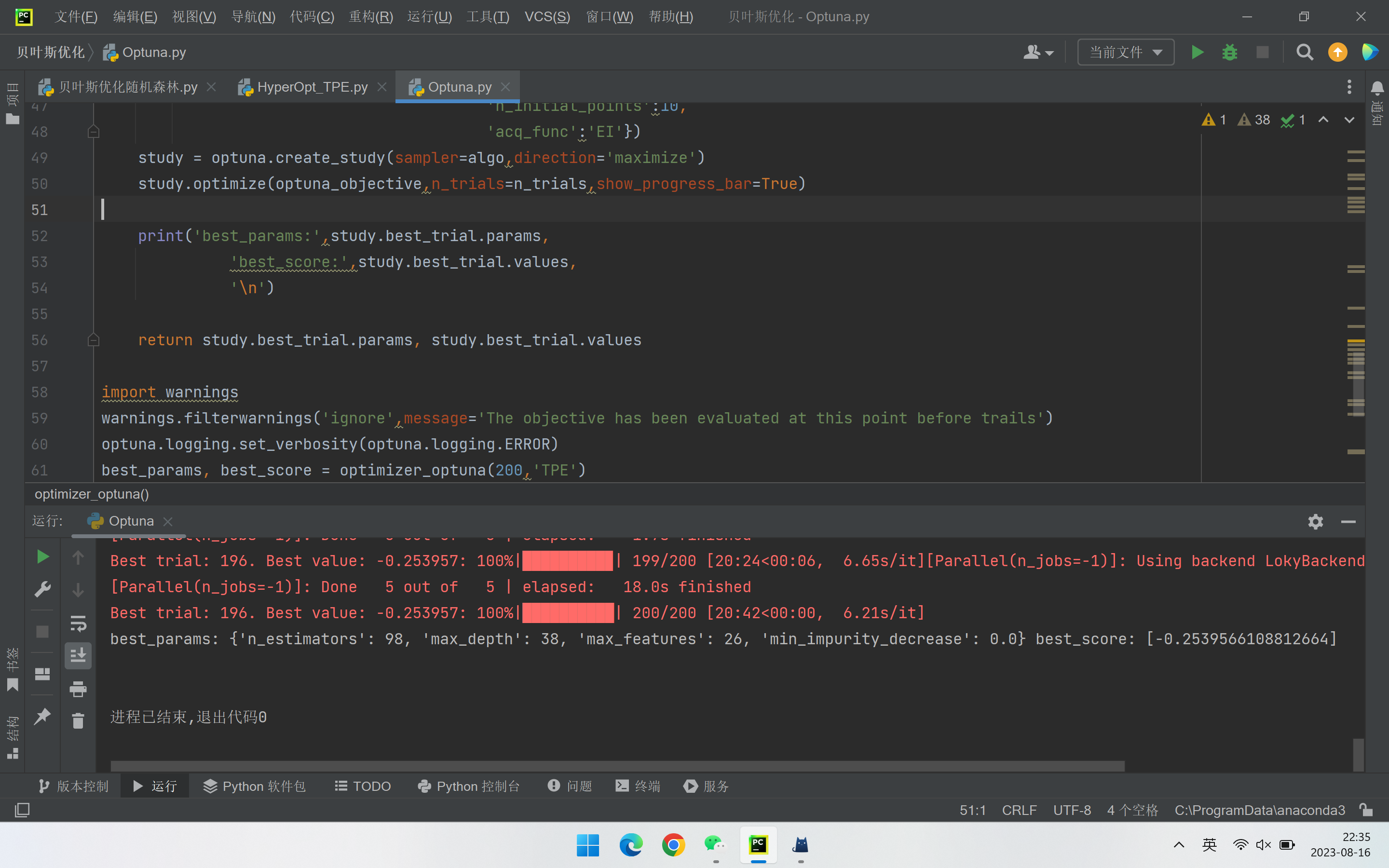
数据分析 | 调用Optuna库实现基于TPE的贝叶斯优化 | 以随机森林回归为例
1. Optuna库的优势 对比bayes_opt和hyperoptOptuna不仅可以衔接到PyTorch等深度学习框架上,还可以与sklearn-optimize结合使用,这也是我最喜欢的地方,Optuna因此特性可以被使用于各种各样的优化场景。 2. 导入必要的库及加载数据 用的是sklea…...
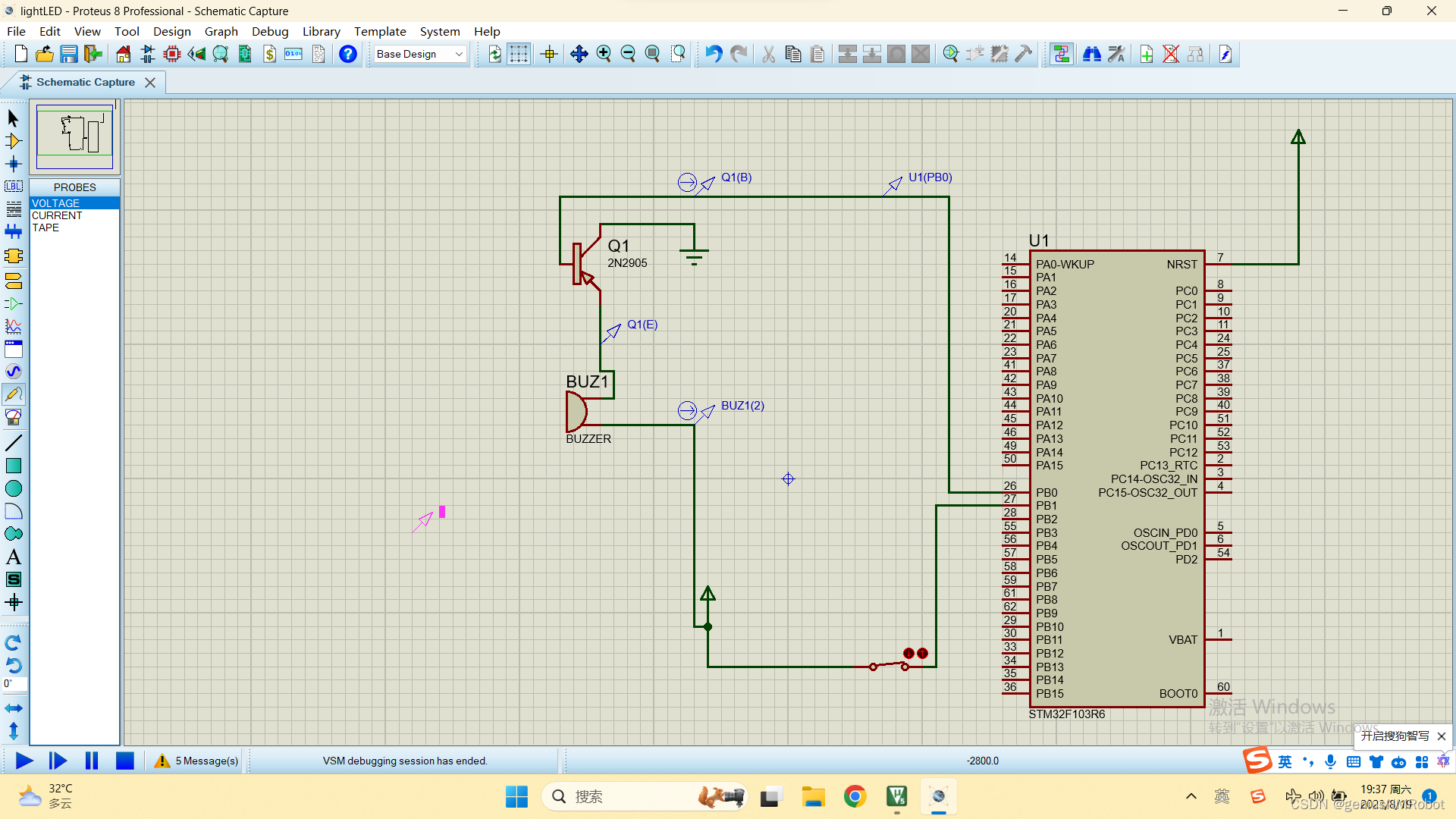
stm32单片机开关输入控制蜂鸣器参考代码(附PROTEUS电路图)
说明:这个buzzer的额定电压需要改为3V,否则不会叫,源代码几乎是完全一样的 //gpio.c文件 /* USER CODE BEGIN Header */ /********************************************************************************* file gpio.c* brief Thi…...
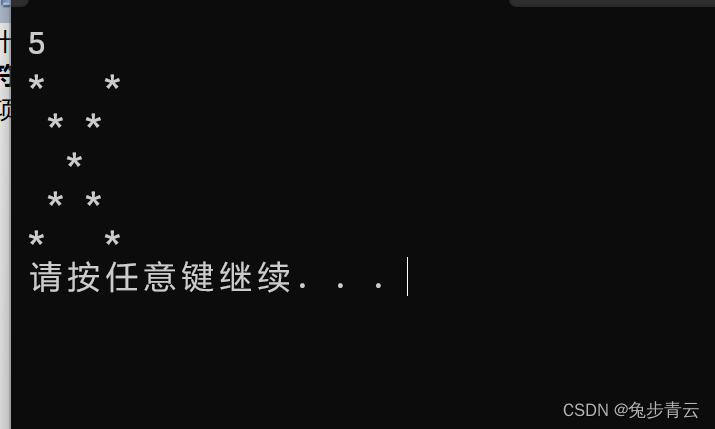
打印X型的图案
int main() {int n0;int i0;int j0;scanf("%d",&n);for(i0;i<n;i){for(j0;j<n;j){if(ij){printf("*");}else if((ij)n-1){printf("*");}elseprintf(" ");}printf("\n");}return 0; }...
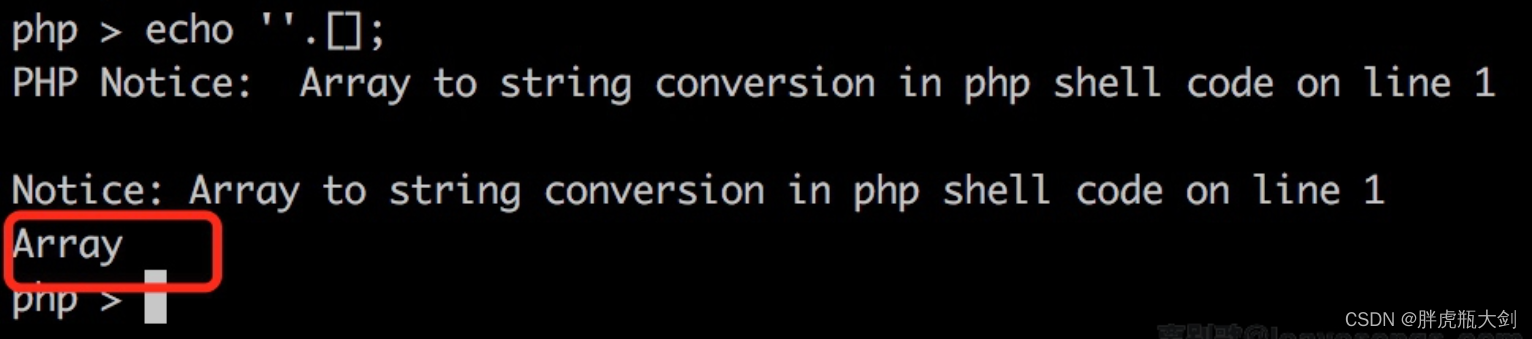
不含数字的webshell绕过
异或操作原理 1.首先我们得了解一下异或操作的原理 在php中,异或操作是两个二进制数相同时,异或(相同)为0,不同为1 举个例子 A的ASCII值是65,对应的二进制值是0100 0001 的ASCII值是96,对应的二进制值是 0110 000…...

Mac上传项目源代码到GitHub的修改更新
Mac上传项目源代码到GitHub的修改更新 最近在学习把代码上传到github,不得不说,真的还挺方便 这是一个关于怎样更新项目代码的教程。 首先,在本地终端命令行打开至项目文件下第一步:查看当前的git仓库状态,可以使用git…...

Android6:片段和导航
创建项目Secret Message strings.xml <resources><string name"app_name">Secret Message</string><string name"welcome_text">Welcome to the Secret Message app!Use this app to encrypt a secret message.Click on the Star…...
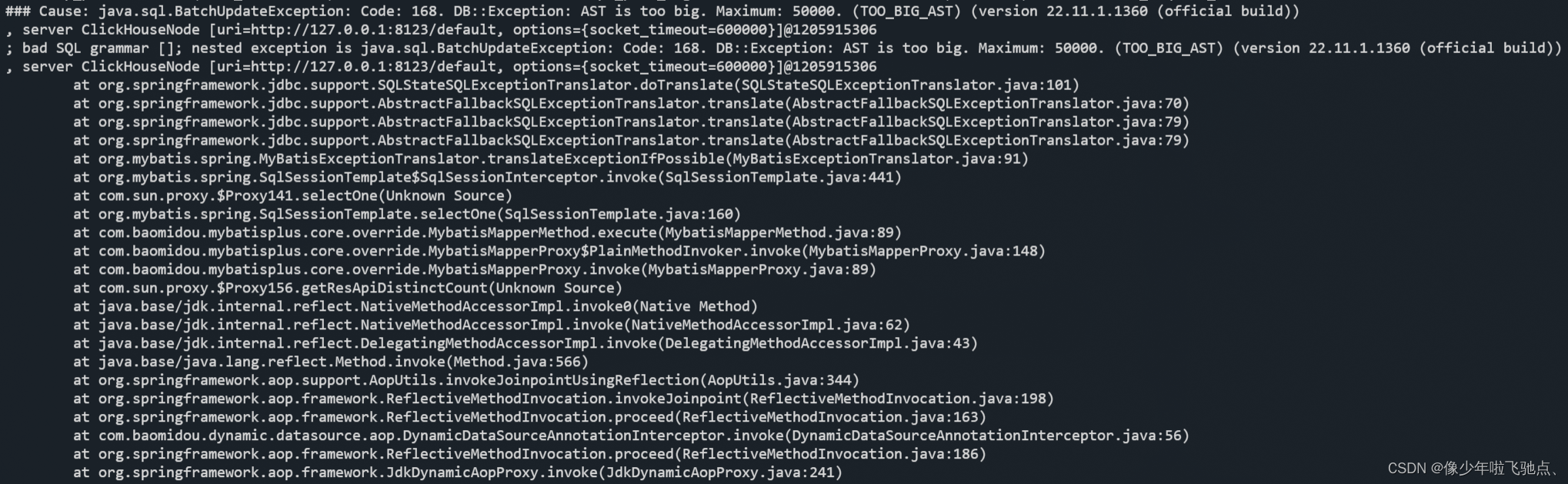
ClickHouse AST is too big 报错问题处理记录
ClickHouse AST is too big 报错问题处理记录 问题描述问题分析解决方案1、修改系统配置2、修改业务逻辑 问题描述 项目中统计报表的查询出现 AST is too big 问题,报错信息如下: 问题分析 报错信息显示 AST is too big。 AST 表示查询语法树中的最大…...

DPDK系列之二十七DIDO
一、DIDO介绍 随着计算机技术发展,特别是应用技术的快速发展。应用场景对计算机的处理速度几乎已经到了疯狂的地步。说句大白话,再快的CPU也嫌慢。没办法,CPU和IO等技术基本目前都处在了瓶颈之处,大幅度提高,短时间内…...
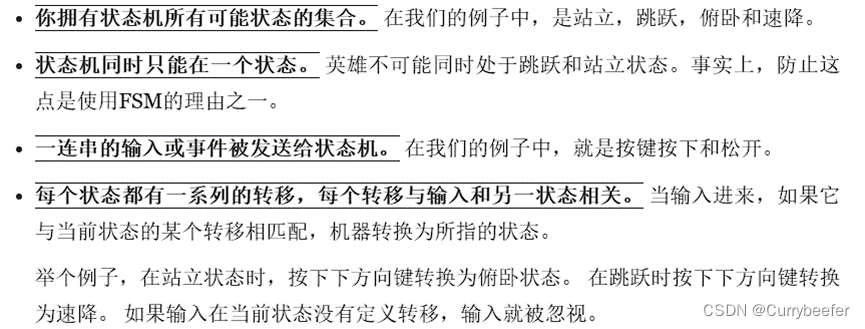
《游戏编程模式》学习笔记(七)状态模式 State Pattern
状态模式的定义 允许对象在当内部状态改变时改变其行为,就好像此对象改变了自己的类一样。 举个例子 在书的示例里要求你写一个人物控制器,实现跳跃功能 直觉上来说,我们代码会这么写: void Heroine::handleInput(Input input…...
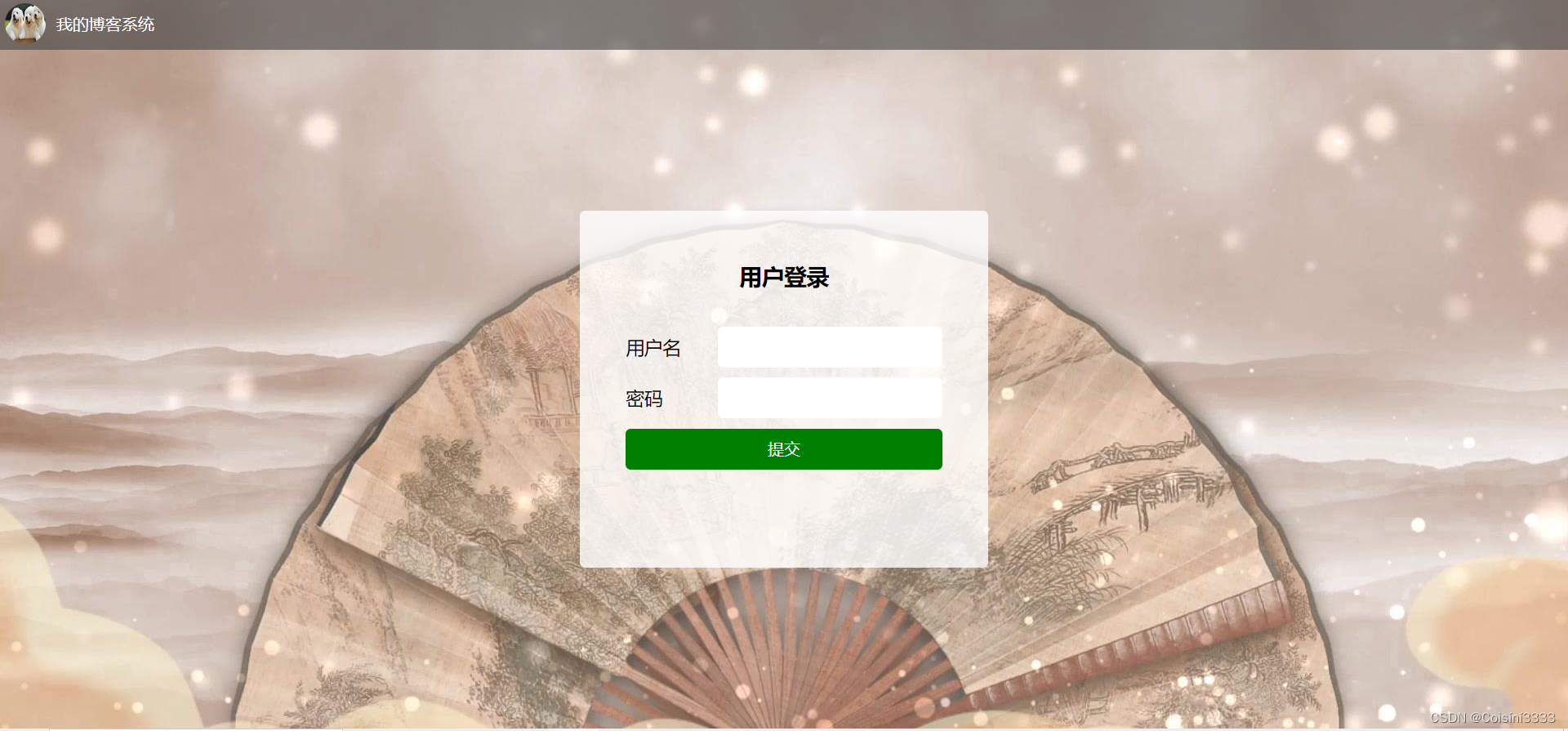
博客系统之功能测试
博客系统共有:用户登录功能、发布博客功能、查看文章详情功能、查看文章列表功能、删除文章功能、退出功能 1.登录功能: 1.1测试对象:用户登录 1.2测试用例 方法:判定表 用例 编号 操作步骤预期结果实际结果截图1 1.用户名正确…...

CJS和 ES6 的语法区别
CommonJS 使用 module.exports 导出模块。ES6 使用 export 导出模块。 示例代码: CommonJS(CJS)模块的导出: // 导出模块 module.exports {foo: bar,baz: function() {return qux;} }; ES6 模块的导出: // 导出模…...
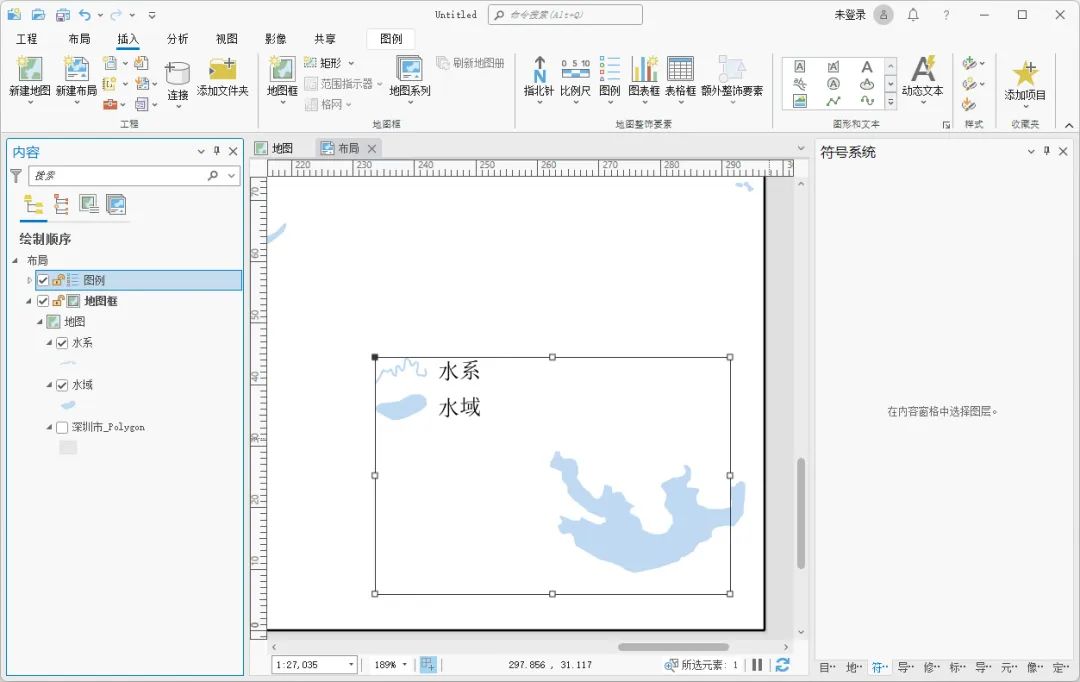
ArcGIS Pro如何制作不规则形状图例
在默认的情况下,ArcGIS Pro生成的图例是标准的点、直线和矩形的,对于湖泊等要素而言,这样的表示方式不够直观,我们可以将其优化一下,制作不规则的线和面来代替原有图例,这里为大家介绍一下制作方法…...
)
Qgis二次开发-QgsAnnotationItem实战:构建交互式地图标注系统(文字、SVG、PNG/JPG)
1. QgsAnnotationItem基础概念与核心组件 在Qgis二次开发中,标注系统是增强地图表现力的重要工具。QgsAnnotationItem作为标注绘制的抽象基类,与我们熟悉的传统标注(QgsAnnotation)有本质区别——它专为QgsAnnotationLayer设计&am…...
)
从Excel到数据库:用Pandas Timestamp统一你的时间数据(pd.to_datetime实战解析)
从Excel到数据库:用Pandas Timestamp统一你的时间数据(pd.to_datetime实战解析) 在数据工程领域,时间数据的标准化处理往往是ETL流程中最容易被低估的痛点。当Excel表格中的"2023/1/15"遇上数据库里的"15-JAN-23&q…...

嵌入式音频处理与SD卡系统克隆实战指南
1. 项目概述与核心价值如果你正在捣鼓一块像Chumby Hacker Board这样的嵌入式开发板,或者任何带有音频输出和SD卡存储的Linux设备,那么你迟早会碰到两个绕不开的“硬骨头”:音频信号的处理和存储系统的克隆部署。前者决定了你的设备能不能“好…...

5个实战案例:使用Promises/A+规范解决复杂异步编程难题
5个实战案例:使用Promises/A规范解决复杂异步编程难题 【免费下载链接】promises-spec An open standard for sound, interoperable JavaScript promises—by implementers, for implementers. 项目地址: https://gitcode.com/gh_mirrors/pr/promises-spec P…...

101种美食-图像分类数据集
101种美食图像分类数据集 数据集(文章最后关注公众号获取数据集): 通过网盘分享的文件: 链接: https://pan.baidu.com/s/1MWasy2HPJSknwgA5IrrNSA?pwdzj6u 提取码: zj6u 数据集信息介绍 apple_pie(苹果派)…...

AI技能实战:本地部署大模型构建智能摘要工具
1. 项目概述:一个面向AI技能实践的开发者工具箱最近在GitHub上看到一个挺有意思的项目,叫inblog-inc/inblog-ai-skills。光看这个名字,你可能会觉得它又是一个关于“AI技能”的教程合集或者理论文档。但点进去之后,我发现它的定位…...

开源RPA工具Clawless:本地化低代码自动化实战与核心原理
1. 项目概述:从“无爪”到“有手”,一个开源RPA项目的诞生最近在GitHub上闲逛,发现了一个挺有意思的项目,叫“Clawless”,直译过来是“无爪”。初看这个标题,你可能会有点摸不着头脑,这跟自动化…...

容器化应用分发平台seait:简化部署流程,实现一键运行
1. 项目概述:一个面向开发者的容器化应用分发平台最近在折腾个人项目部署和团队协作时,我一直在思考一个问题:如何能像分发一个可执行文件一样,轻松地分享和运行一个完整的、包含所有依赖的应用程序?尤其是在跨平台、跨…...

Yii2开启URI伪静态的相关配置
Yii2 开启URI伪静态的相关配置 Yii2支持url伪静态链接转换,在配置文件config/web.php中加入 # config/web.php $config [components > [// URI伪静态化配置urlManager > [enablePrettyUrl > true, // 启用美化 URL(隐藏 index.php)…...

面向对象_昂瑞微_作者观点仅供参考
C 语言面向对象编程实例解析 选自 OnMicro OM6626 BLE SDK 中的 DFU(Device Firmware Upgrade)模块。 适合有一定 C 基础、想理解"如何在 C 中实现面向对象"的初级工程师。 一、先看最终效果:调用方完全不关心底层实现 在 onmicro…...