深入浅出Pytorch函数——torch.nn.init.kaiming_uniform_
分类目录:《深入浅出Pytorch函数》总目录
相关文章:
· 深入浅出Pytorch函数——torch.nn.init.calculate_gain
· 深入浅出Pytorch函数——torch.nn.init.uniform_
· 深入浅出Pytorch函数——torch.nn.init.normal_
· 深入浅出Pytorch函数——torch.nn.init.constant_
· 深入浅出Pytorch函数——torch.nn.init.ones_
· 深入浅出Pytorch函数——torch.nn.init.zeros_
· 深入浅出Pytorch函数——torch.nn.init.eye_
· 深入浅出Pytorch函数——torch.nn.init.dirac_
· 深入浅出Pytorch函数——torch.nn.init.xavier_uniform_
· 深入浅出Pytorch函数——torch.nn.init.xavier_normal_
· 深入浅出Pytorch函数——torch.nn.init.kaiming_uniform_
· 深入浅出Pytorch函数——torch.nn.init.kaiming_normal_
· 深入浅出Pytorch函数——torch.nn.init.trunc_normal_
· 深入浅出Pytorch函数——torch.nn.init.orthogonal_
· 深入浅出Pytorch函数——torch.nn.init.sparse_
torch.nn.init模块中的所有函数都用于初始化神经网络参数,因此它们都在torc.no_grad()模式下运行,autograd不会将其考虑在内。
根据He, K等人于2015年在《Delving deep into rectifiers: Surpassing human-level performance on ImageNet classification》中描述的方法,用一个均匀分布生成值,填充输入的张量或变量。结果张量中的值采样自 U ( − bound , bound ) U(-\text{bound}, \text{bound}) U(−bound,bound),其中:
bound = gain × 3 fan_mode \text{bound} = \text{gain} \times \sqrt{\frac{3}{\text{fan\_mode}}} bound=gain×fan_mode3
这种方法也被称为He initialisation。
语法
torch.nn.init.kaiming_uniform_(tensor, a=0, mode='fan_in', nonlinearity='leaky_relu')
参数
tensor:[Tensor] 一个 N N N维张量torch.Tensora:[float] 这层之后使用的rectifier的斜率系数(ReLU的默认值为0)mode:[str] 可以为fan_in或fan_out。若为fan_in则保留前向传播时权值方差的量级,若为fan_out则保留反向传播时的量级,默认值为fan_in。nonlinearity:[str] 一个非线性函数,即一个nn.functional的名称,推荐使用relu或者leaky_relu,默认值为leaky_relu。
返回值
一个torch.Tensor且参数tensor也会更新
实例
w = torch.empty(3, 5)
nn.init.kaiming_uniform_(w, mode='fan_in', nonlinearity='relu')
函数实现
def kaiming_uniform_(tensor: Tensor, a: float = 0, mode: str = 'fan_in', nonlinearity: str = 'leaky_relu'
):r"""Fills the input `Tensor` with values according to the methoddescribed in `Delving deep into rectifiers: Surpassing human-levelperformance on ImageNet classification` - He, K. et al. (2015), using auniform distribution. The resulting tensor will have values sampled from:math:`\mathcal{U}(-\text{bound}, \text{bound})` where.. math::\text{bound} = \text{gain} \times \sqrt{\frac{3}{\text{fan\_mode}}}Also known as He initialization.Args:tensor: an n-dimensional `torch.Tensor`a: the negative slope of the rectifier used after this layer (onlyused with ``'leaky_relu'``)mode: either ``'fan_in'`` (default) or ``'fan_out'``. Choosing ``'fan_in'``preserves the magnitude of the variance of the weights in theforward pass. Choosing ``'fan_out'`` preserves the magnitudes in thebackwards pass.nonlinearity: the non-linear function (`nn.functional` name),recommended to use only with ``'relu'`` or ``'leaky_relu'`` (default).Examples:>>> w = torch.empty(3, 5)>>> nn.init.kaiming_uniform_(w, mode='fan_in', nonlinearity='relu')"""if torch.overrides.has_torch_function_variadic(tensor):return torch.overrides.handle_torch_function(kaiming_uniform_,(tensor,),tensor=tensor,a=a,mode=mode,nonlinearity=nonlinearity)if 0 in tensor.shape:warnings.warn("Initializing zero-element tensors is a no-op")return tensorfan = _calculate_correct_fan(tensor, mode)gain = calculate_gain(nonlinearity, a)std = gain / math.sqrt(fan)bound = math.sqrt(3.0) * std # Calculate uniform bounds from standard deviationwith torch.no_grad():return tensor.uniform_(-bound, bound)
相关文章:

深入浅出Pytorch函数——torch.nn.init.kaiming_uniform_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...

查询Oracle和MySQL数据库中当前所有连接信息
查询Oracle当前所有连接信息: SELECTs.sid AS 会话ID,s.serial# AS 序列号,s.username AS 用户名,s.osuser AS 操作系统用户,s.machine AS 客户端机器,s.program AS 客户端程序,s.status AS 会话状态,s.sql_id AS 正在执行的SQL_ID,t.sql_text AS 正在执行的SQL文本…...
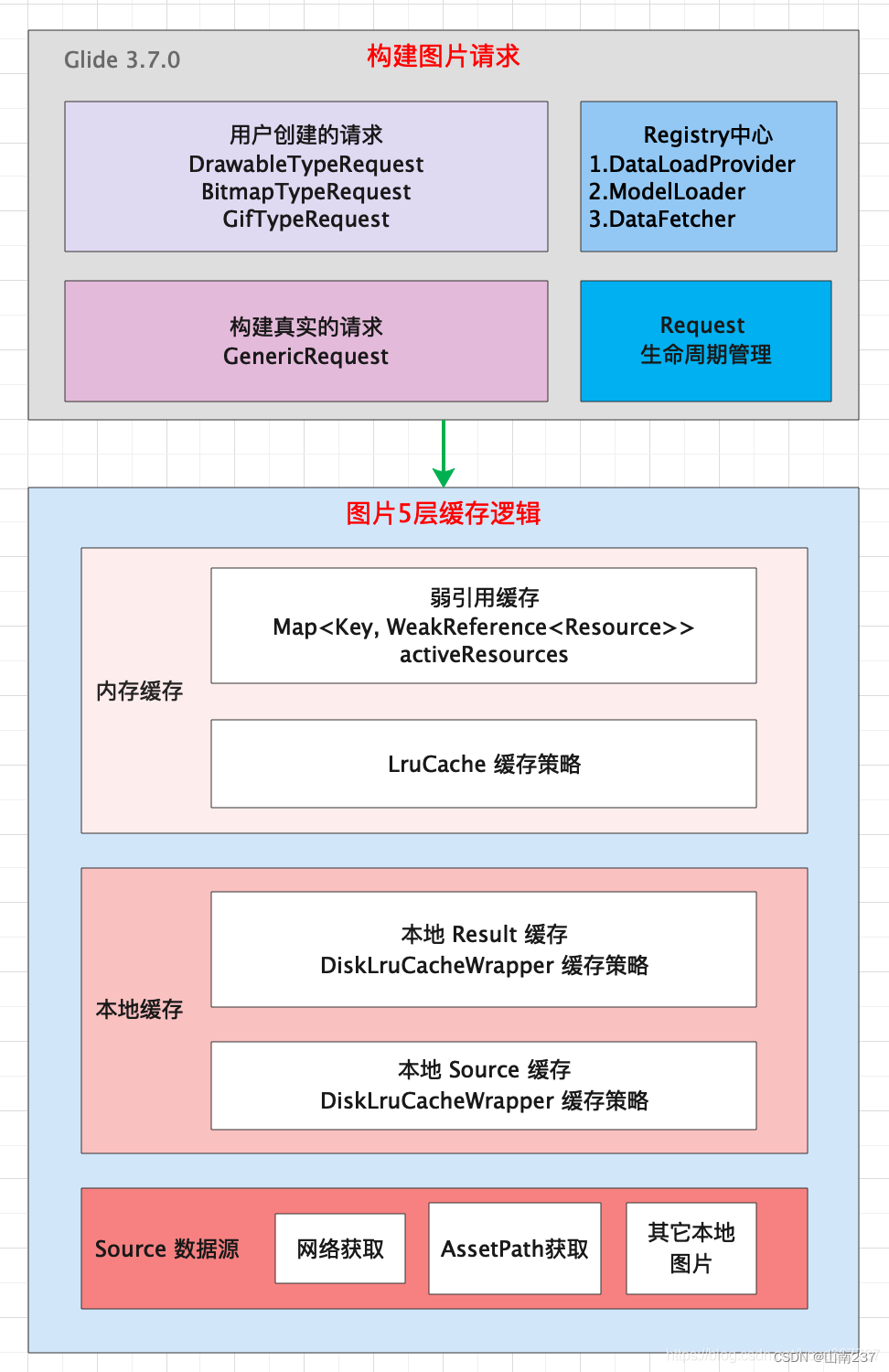
Android glide框架及框架涉及到的设计模式
目录 原文链接Android glide框架 简单使用介绍Glide 框架整体结构设计Glide 框架的优点基本使用:Glide占位符 Android glide框架涉及到的设计模式 原文链接 Android glide框架 简单使用介绍 Glide:快速高效的Android图片加载库,可以自动加载…...
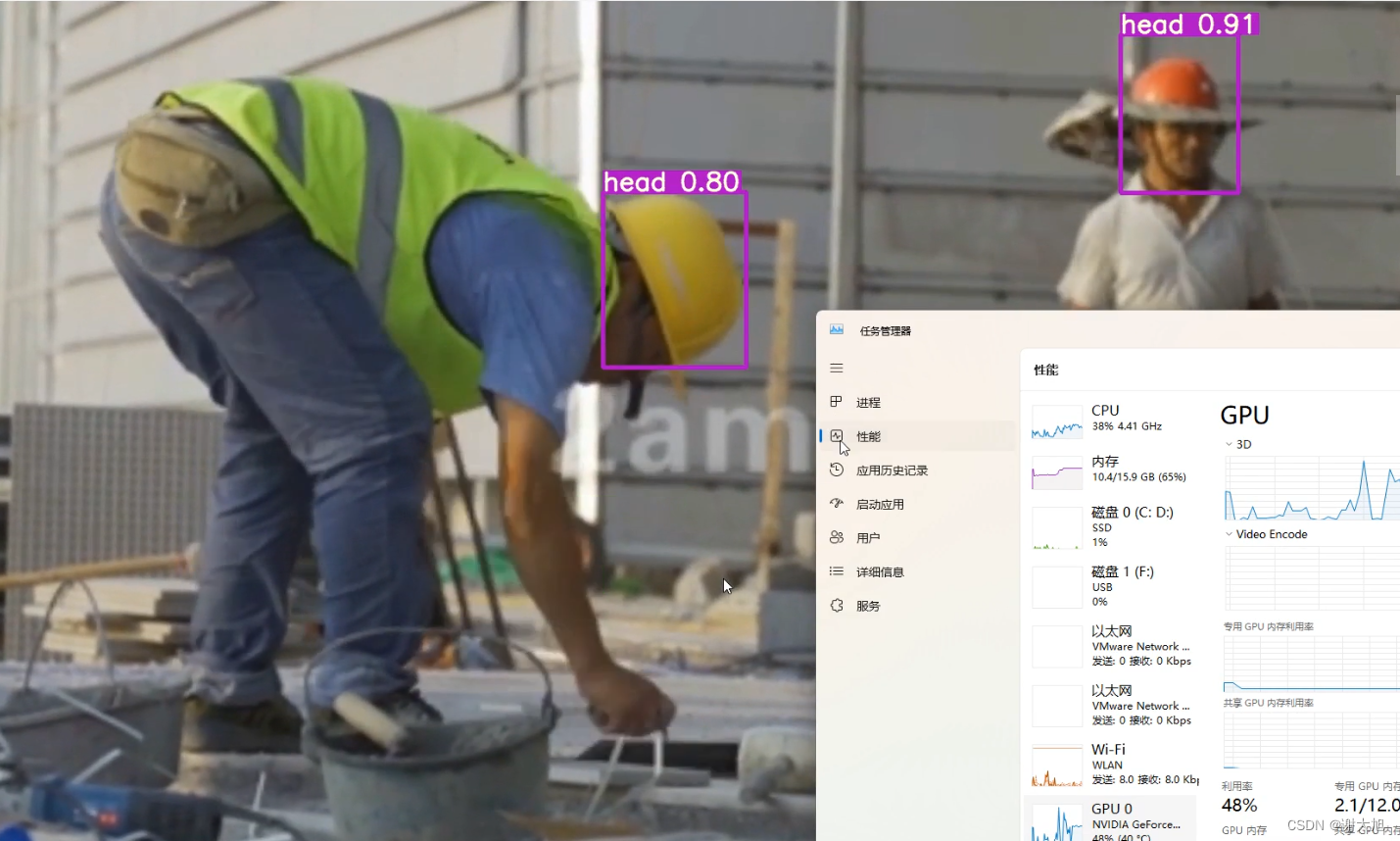
使用yolov5进行安全帽检测填坑指南
参考项目 cGitHub - PeterH0323/Smart_Construction: Base on YOLOv5 Head Person Helmet Detection on Construction Sites,基于目标检测工地安全帽和禁入危险区域识别系统,🚀😆附 YOLOv5 训练自己的…...
【BASH】回顾与知识点梳理(三十二)
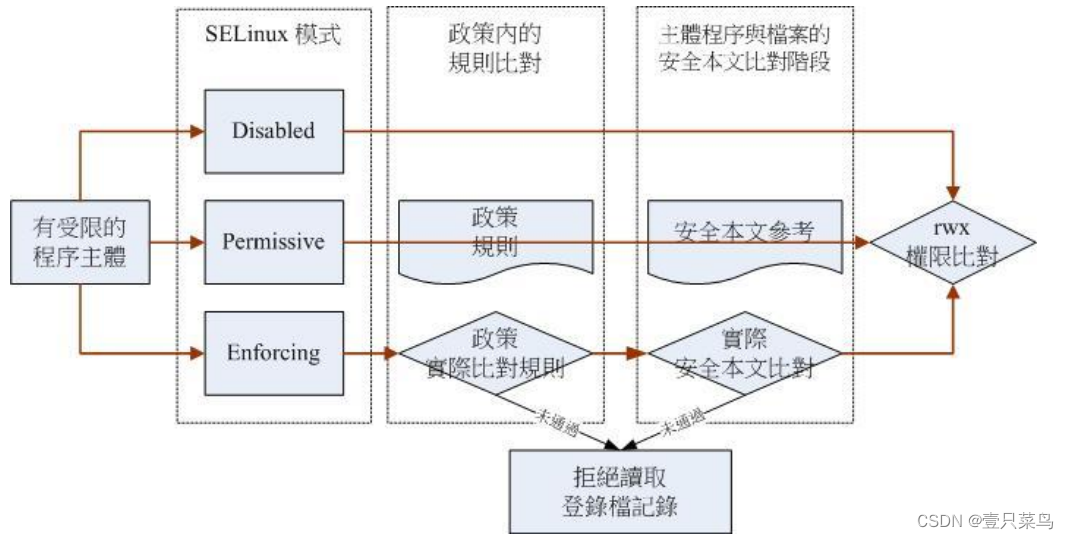
【BASH】回顾与知识点梳理 三十二 三十二. SELinux 初探32.1 什么是 SELinux当初设计的目标:避免资源的误用传统的文件权限与账号关系:自主式访问控制, DAC以政策规则订定特定进程读取特定文件:委任式访问控制, MAC 32.2 SELinux 的运作模式安…...
vscode远程调试PHP代码
目录 一、准备工作 二、ssh连接和xdebug配置 1.ssh连接 2.xdebug配置 三、xdebug调试,访问 一、准备工作 1.安装vscode里面的两个扩展 2.安装对应PHP版本的xdebug 去xdebug官方,复制自己的phpinfo源码到方框里,再点击Analyse Xdebug: …...

flink1.17 实现 udf scalarFunctoin get_json_object 支持 非标准化json
特色 相比官方的json_value,该函数支持非标准化json,比如v是个object,但是非标准json会外套一层引号,内部有反引号. eg: {"kkkk2": "{\"kkkk1\":\"vvvvvvv\"}" } 支持value为 100L 这种java格式的bigint. {"k":999L…...
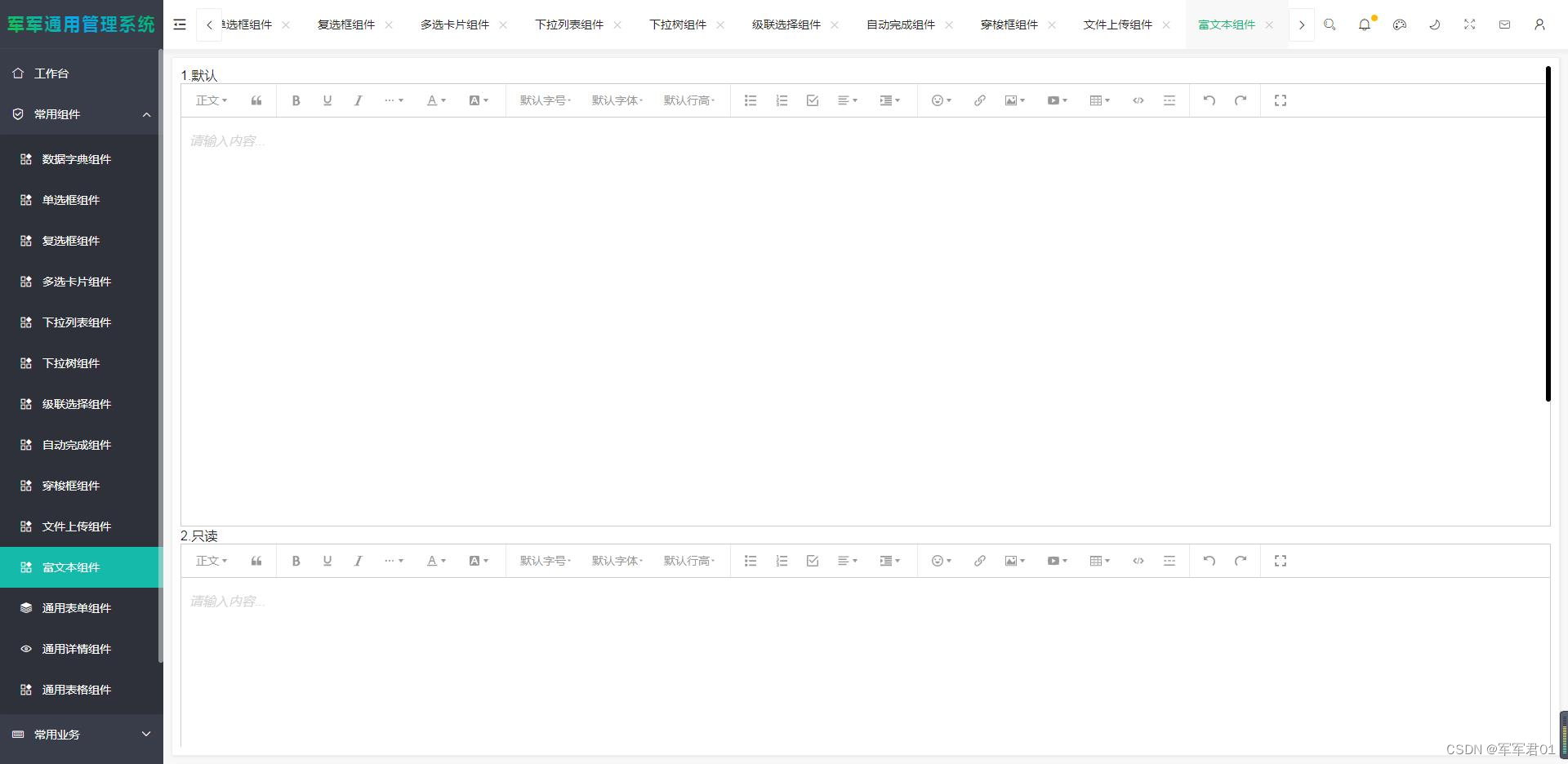
基于VUE3+Layui从头搭建通用后台管理系统(前端篇)九:自定义组件封装下
一、本章内容 续上一张,本章实现一些自定义组件的封装,包括文件上传组件封装、级联选择组件封装、富文本组件封装等。 1. 详细课程地址: 待发布 2. 源码下载地址: 待发布 二、界面预览 三、开发视频 基于VUE3+Layui从头搭建通用后台管...

设计模式详解-装饰器模式
类型:结构型模式 实现原理:装饰器模式通过将对象包装在装饰器类中,并在保持类方法签名完整性的前提下,提供额外功能 作用:动态地给一个对象添加一些额外的职责。增加功能方面,装饰器模式比生成子类更灵活…...
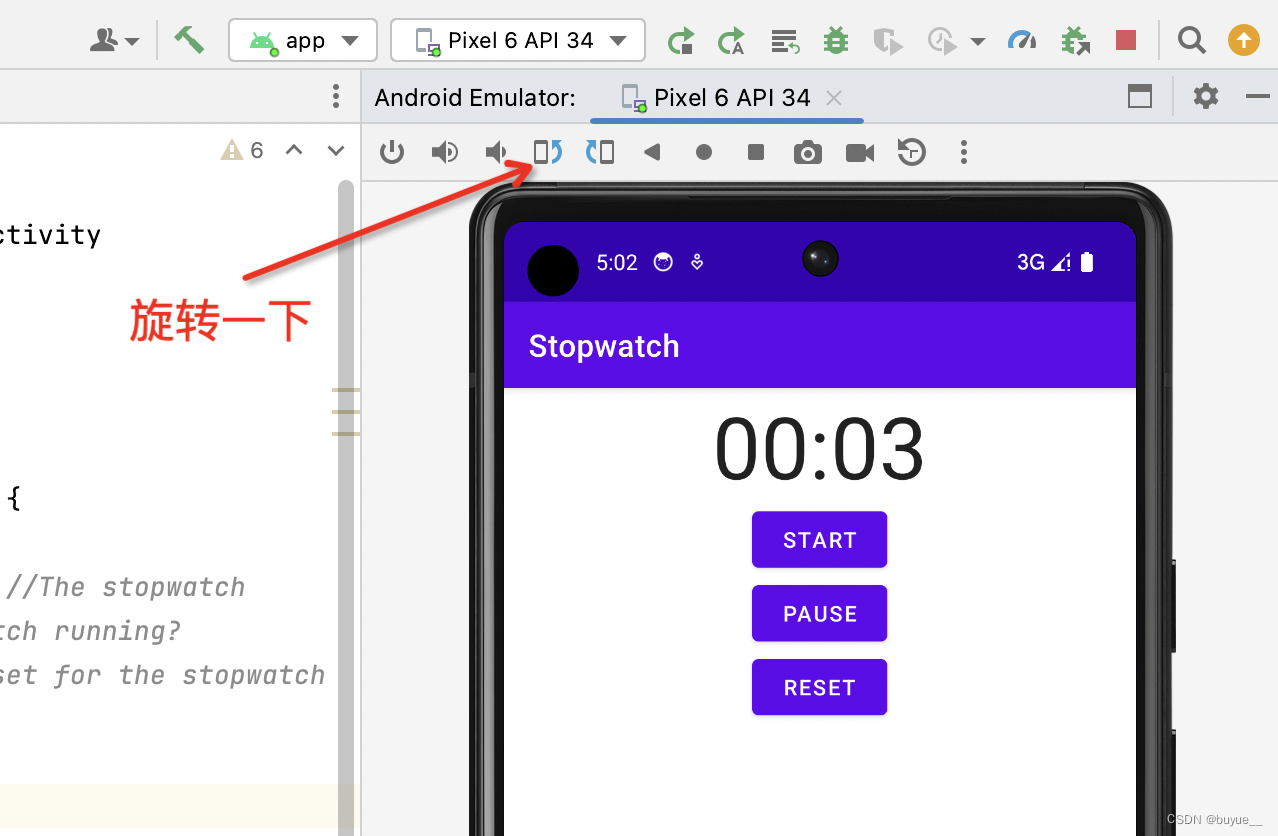
Android5:活动生命周期
创建项目Stopwatch activity_main.xml <?xml version"1.0" encoding"utf-8"?> <LinearLayoutxmlns:android"http://schemas.android.com/apk/res/android"xmlns:tools"http://schemas.android.com/tools"android:layout_w…...

第2章 数据结构和算法概述
2.3线性结构和非线性结构 数据结构包括: 线性结构和非线性结构 2.3.1线性结构 线性结构作为最常用的数据结构,其特点是数据元素之间存在一对一的线性关系线性结构有两种不同的存储结构,即顺序存储结构(数组)和链式存储结构(链表)。顺序存储的线性表称…...
WPF国际化的实现方法(WpfExtensions.Xaml)
https://blog.csdn.net/eyupaopao/article/details/120090431 resx资源文件实现 resx资源文件,实现的过程比第一种复杂,但resx文件本身编辑比较简单,维护起来比较方便。需要用到的框架:WpfExtensions.Xaml 为每种语言添加.resx资…...

【Linux】—— 进程程序替换
目录 序言 (一)替换原理 1、进程角度——见见猪跑 1️⃣ 认识 execl 函数 2、程序角度——看图理解 (二)替换函数 1、命名理解 2、函数理解 1️⃣execlp 2️⃣execv 3️⃣execvp 4️⃣execle 5️⃣execve 6️⃣execve…...
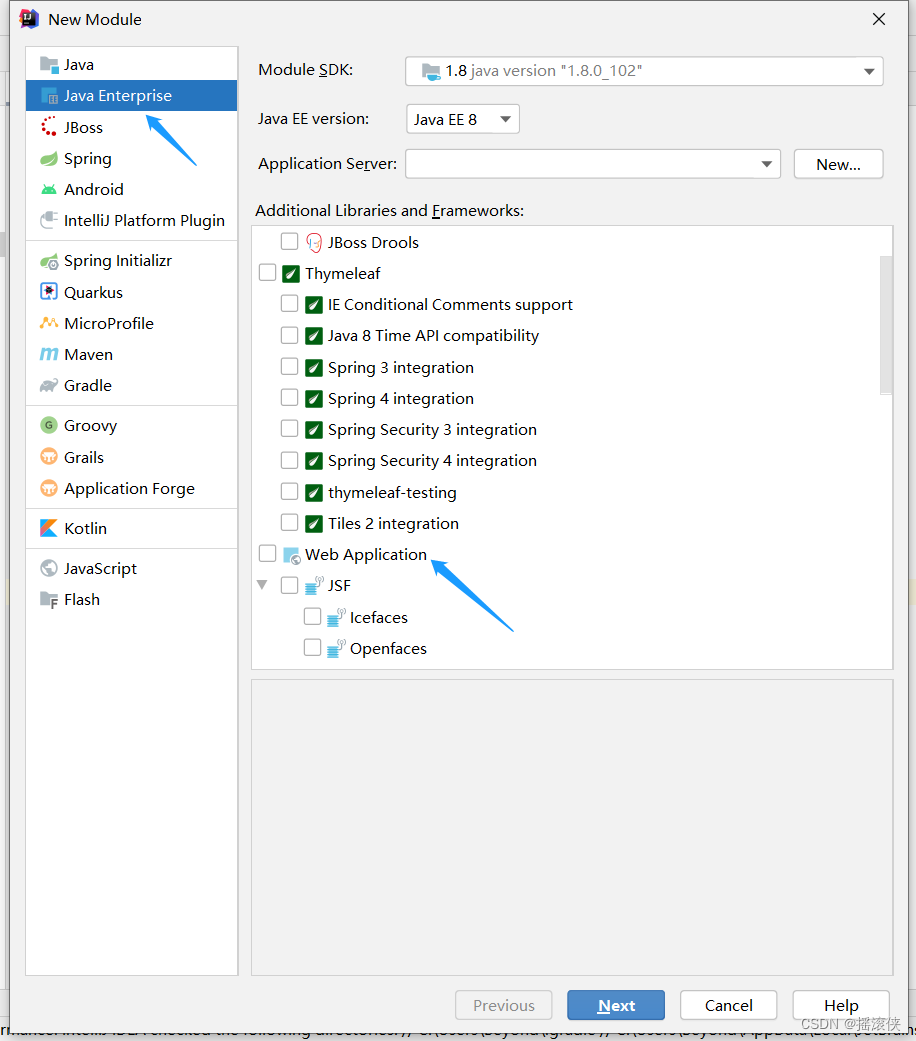
idea创建javaweb项目,jboss下没有web application
看看下图这个地方有没有web application...
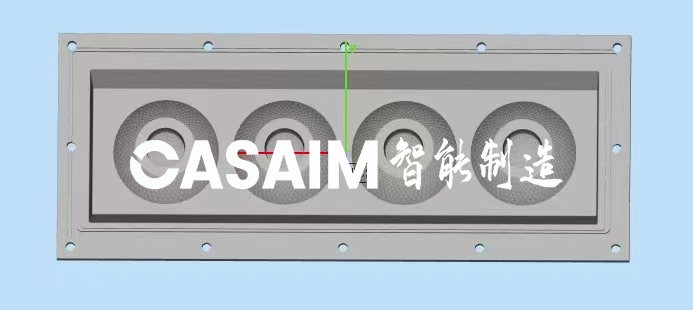
广东灯具3D扫描抄数建模服务3D测绘出图纸三维逆向设计-CASAIM
灯具三维逆向建模是一种将实际物体转换为数字模型的过程。通过逆向工程技术,可以将现有的灯具进行3D扫描,然后利用专业的逆向设计软件将其转换为准确的三维模型。 以下是CASAIM实施灯具三维逆向建模的一般步骤图: 1. 扫描:三维扫…...

Nginx反向代理-负载均衡、webshell实践
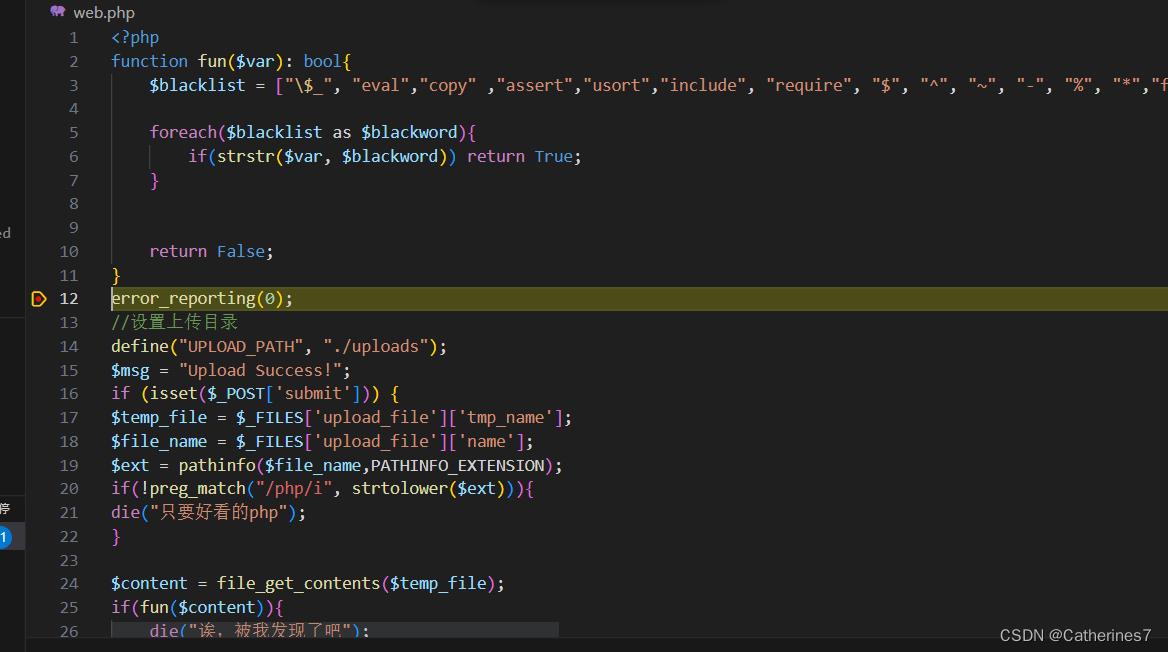
目录 1.nginx反向代理-负载均衡 1)搭建web项目 2)修改 nginx.conf的配置 2.webshell 实践 1)异或操作绕过 2)取反绕过 3)php语法绕过 1.nginx反向代理-负载均衡 1)搭建web项目 首先通过SpringBoo…...
第六阶|见道明心的笔墨(上)从书法之美到生活之美——林曦老师的线上直播书法课
如果你有需要,可以找我的,我这边有老师的所有课程 如果你有需要,可以找我的,我这边有老师的所有课程...

nbcio-boot从3.0升级到3.1的出现用户管理与数据字典bug
升级后出现 系统管理里的用户管理出现下面问题 2023-08-17 09:44:38.902 [http-nio-8080-exec-4] [1;31mERROR[0;39m [36mo.jeecg.common.exception.JeecgBootExceptionHandler:69[0;39m - java.lang.String cannot be cast to java.lang.Long java.lang.ClassCastException:…...
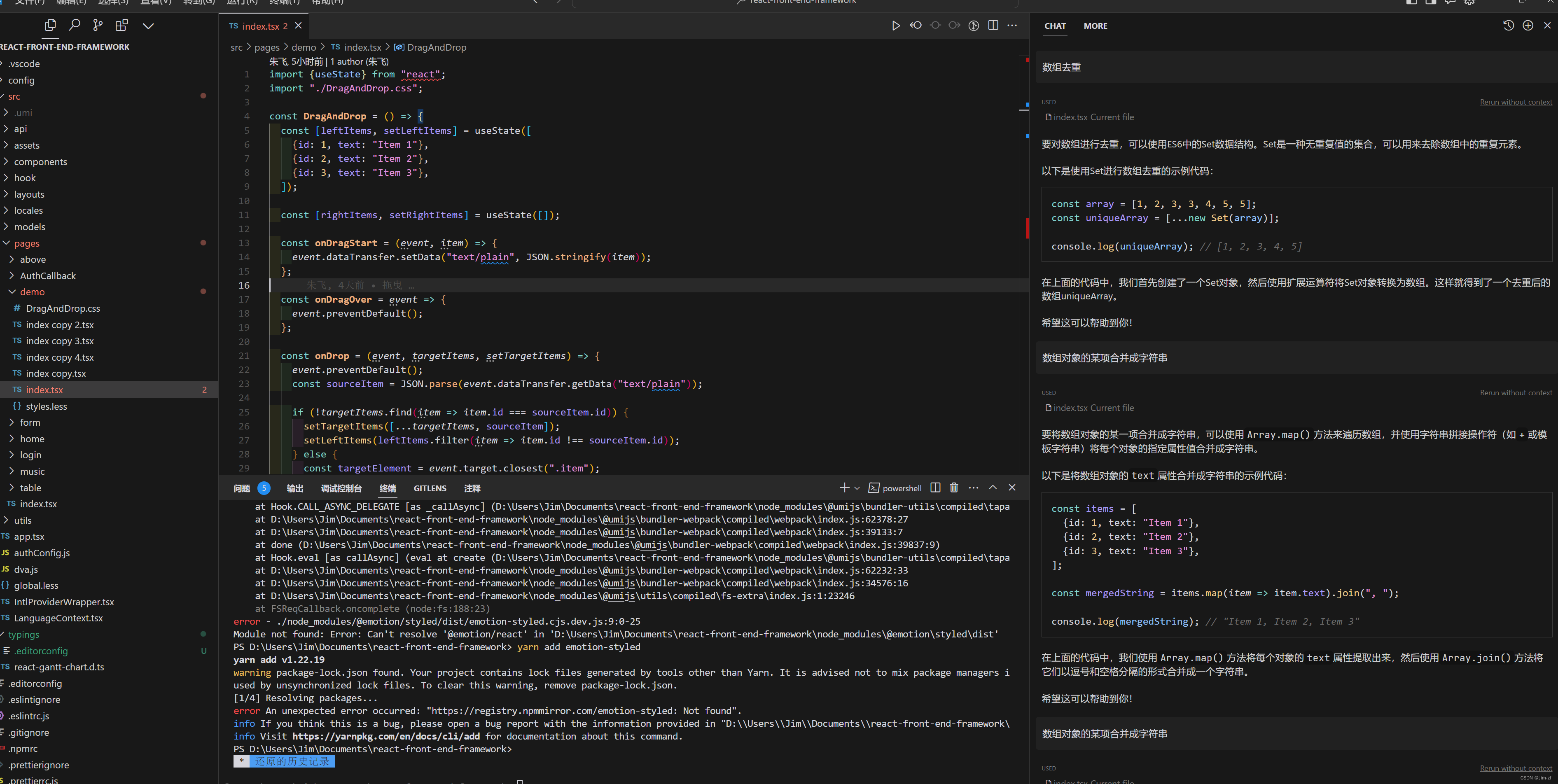
Curson 编辑器
Curson 汉化与vacode一样 Curson 自带chat功能 1、快捷键ctrlk(代码中编辑) 2、快捷键ctrll 右侧打开窗口...

Shell编程学习之函数的应用
Shell编程中的函数:伪代码表示: function 函数名(){函数体}注意事项: 1.函数无参数; 2.函数无返回值类型; 3.function可以不写; 4.函数不被调用,就不会执行; 5.函数名不能使用…...

从Hub到交换机:一个被遗忘的环路案例,带你重新审视STP的实际价值与配置陷阱
从Hub到交换机:一个被遗忘的环路案例,带你重新审视STP的实际价值与配置陷阱 在某个制造业工厂的机房角落,一台老式集线器(HUB)仍然顽强地工作着——它连接着几台关键设备,因为某些历史原因尚未被替换。当网…...

智能语音转文字终极指南:如何用AsrTools轻松完成音频转字幕
智能语音转文字终极指南:如何用AsrTools轻松完成音频转字幕 【免费下载链接】AsrTools ✨ AsrTools: Smart Voice-to-Text Tool | Efficient Batch Processing | User-Friendly Interface | No GPU Required | Supports SRT/TXT Output | Turn your audio into accu…...
:定义、价值、应用及实操指南)
一文读懂STA(静态时序分析):定义、价值、应用及实操指南
在数字集成电路设计领域,时序性能是决定芯片能否稳定、高效运行的核心因素,而静态时序分析(Static Timing Analysis,简称STA)作为时序验证的核心手段,早已成为芯片设计流程中不可或缺的一环。无论是FPGA还是…...

非洲车商采购中国二手车的完整流程:从找车到提车七步走
操作目标:帮助非洲车商、进口商、批发商及其采购代理,系统性地完成中国二手车采购。适用对象:想了解采购中国二手车完整流程的海外B端买家。采购流程SOP第一步:找车源渠道说明适用场景广州出口基地南沙、番禺、白云实地考察线上平…...

工业微功率DC-DC选型性能对比解析:钡特电源 DH1-24S05LS 与 H2405S-1WR3 封装对照互通
在工业控制、仪器仪表、通信设备等中低功率供电场景,1W 级隔离工业 DC-DC 模块电源凭借小体积、高可靠、易集成的特性,成为硬件工程师选型的核心品类。直流电源模块作为电子系统的供电核心,其性能稳定性、环境耐受性与长期可靠性直接决定设备…...

Zsh插件实现Git输出路径美化:绝对路径转相对路径原理与实践
1. 项目概述与核心价值最近在终端里敲git status或者git diff的时候,你是不是也经常被那一长串的绝对路径搞得有点烦躁?尤其是在一个嵌套比较深的项目里,输出的文件路径长得能占满半个屏幕,想快速定位到具体是哪个文件改了&#x…...

解决claude code频繁封号问题转向taotoken稳定服务的实践
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 解决Claude Code频繁封号问题转向Taotoken稳定服务的实践 1. 问题背景:开发者面临的稳定性与成本挑战 许多开发者在日…...

我用了半年只留下这1个!2026年英语录音转文字选它真不踩坑
做学术调研的朋友多半都遇过这些坑:熬了半个月跑了10场受访者访谈,攒了8小时录音,手动整理整整花了一周,眼睛都熬花了还错漏一堆;听国外名家讲座录了音,转写工具一堆专业词汇识别错,口音还认不出…...

Python调用MATLAB引擎避坑指南:从安装路径选择到`setup.py` install命令的完整实战
Python调用MATLAB引擎避坑指南:从安装路径选择到setup.py install命令的完整实战 在科学计算和工程仿真领域,MATLAB和Python各有优势。许多开发者希望将两者结合使用,但安装MATLAB引擎到Python环境时常常遇到各种"玄学"问题。本文将…...
)
别再让FTP匿名登录成后门!手把手教你加固vsftpd服务(附CentOS 7实战配置)
企业级vsftpd安全加固实战指南:从匿名登录风险到全方位防护 FTP服务作为企业文件传输的经典解决方案,至今仍在许多组织的IT架构中扮演重要角色。然而,默认配置下的vsftpd服务往往隐藏着致命的安全隐患——匿名登录功能如同一扇未上锁的后门&a…...