STM32——RTC实时时钟
文章目录
- Unix时间戳
- UTC/GMT
- 时间戳转换
- BKP简介
- BKP基本结构
- 读写BKP备份寄存器
- 电路设计
- 关键代码
- RTC简介
- RTC框图
- RTC基本结构
- 硬件电路
- RTC操作注意事项
- 读写实时时钟
- 电路设计
- 关键代码
Unix时间戳
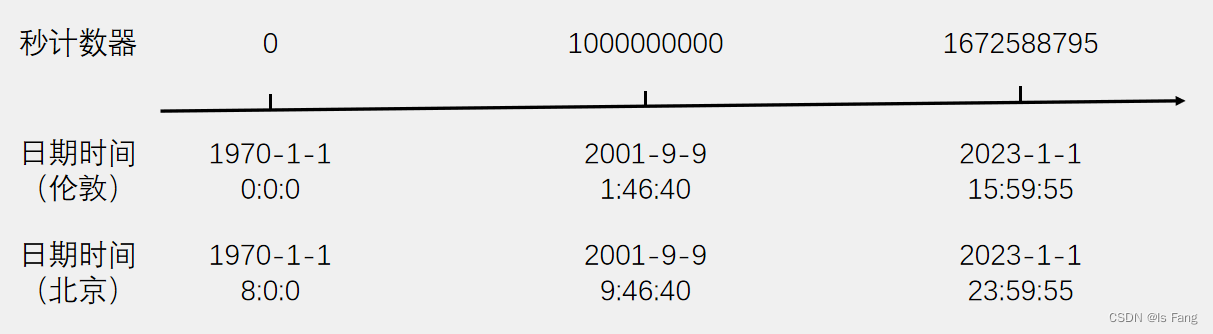
- Unix 时间戳(Unix Timestamp)定义为从UTC/GMT的1970年1月1日0时0分0秒开始所经过的秒数,不考虑闰秒
- 时间戳存储在一个秒计数器中,秒计数器为32位/64位的整型变量
世界上所有时区的秒计数器相同,不同时区通过添加偏移来得到当地时间- 底层使用秒计数器可以节省硬件设计电路,计算时间间隔,存储方便
UTC/GMT
-
GMT(Greenwich Mean Time)格林尼治标准时间是一种以地球自转为基础的时间计量系统。它将地球自转一周的时间间隔等分为24小时,以此确定计时标准
-
UTC(Universal Time Coordinated)协调世界时是一种以原子钟为基础的时间计量系统。它规定铯133原子基态的两个超精细能级间在零磁场下跃迁辐射9,192,631,770周所持续的时间为1秒。当原子钟计时一天的时间与地球自转一周的时间相差超过0.9秒时,
UTC会执行闰秒来保证其计时与地球自转的协调一致
时间戳转换
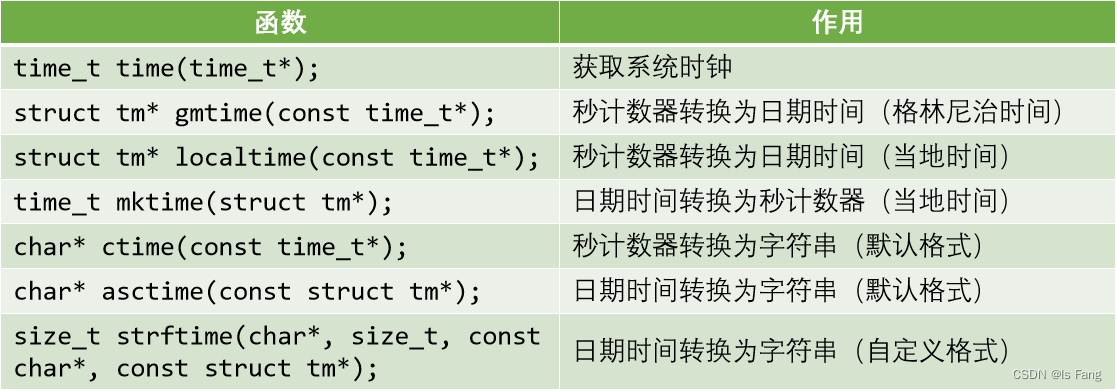
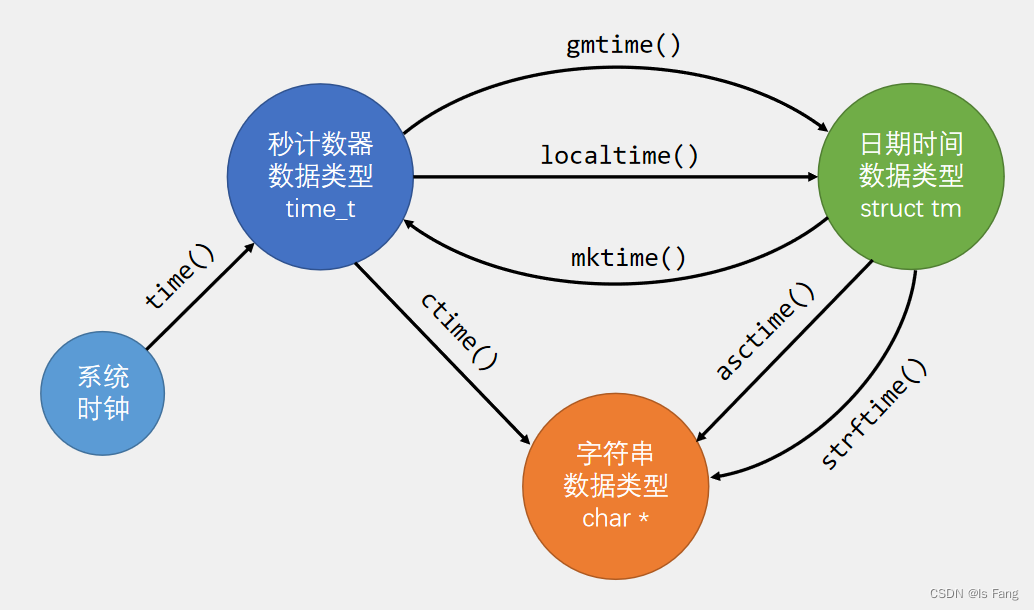
C语言的time.h模块提供了时间获取和时间戳转换的相关函数,可以方便地进行秒计数器、日期时间和字符串之间的转换
- time_t 是int64数据类型
- struct tm 这是一个用来保存时间和日期的结构。
struct tm {int tm_sec; /* 秒,范围从 0 到 59 */int tm_min; /* 分,范围从 0 到 59 */int tm_hour; /* 小时,范围从 0 到 23 */int tm_mday; /* 一月中的第几天,范围从 1 到 31 */int tm_mon; /* 月,范围从 0 到 11 */int tm_year; /* 自 1900 年起的年数 */int tm_wday; /* 一周中的第几天,范围从 0 到 6 */int tm_yday; /* 一年中的第几天,范围从 0 到 365 */int tm_isdst; /* 夏令时 */
};
在线工具:在线时间戳转换工具
菜鸟教程:C 标准库 - <time.h>
localtime和mktime的实例:
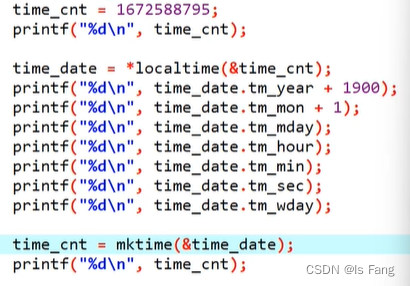
注意:mktime的参数不加const,因为该参数既是输入参数也是输出参数,因为计算出星期后会填写回去
strftime函数:按照格式输出
BKP简介
- BKP(Backup Registers)备份寄存器【需要VBAT引脚供电才能维持,掉电会清零,即使主电源掉电、系统复位也不会清零】【本质是RAM存储器,掉电丢失】
- BKP可用于存储用户应用程序数据。当VDD(
2.0~3.6V)电源被切断,他们仍然由VBAT(1.8~3.6V)维持供电。当系统在待机模式下被唤醒,或系统复位或电源复位时,他们也不会被复位【VBAT和VDD共地即可】 - TAMPER引脚产生的侵入事件【电平检测】将所有备份寄存器BKP内容清除,会申请中断【VDD断电也会工作】
- RTC引脚
输出RTC校准时钟、RTC闹钟脉冲或者秒脉冲【引脚2同一个时间内只能使用一个功能】 - 存储RTC时钟校准寄存器
- 用户数据存储容量:
- 20字节(中容量和小容量)/ 84字节(大容量和互联型)

BKP基本结构
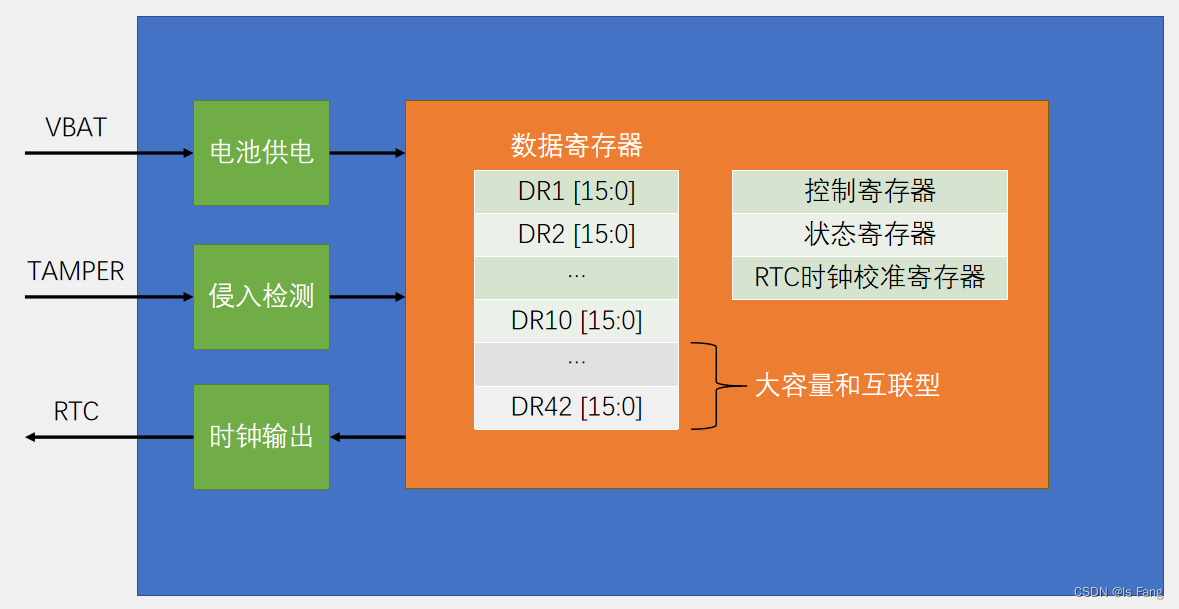
当VDD有电时就使用VDD供电,没有时则使用功能VBAT供电
读写BKP备份寄存器
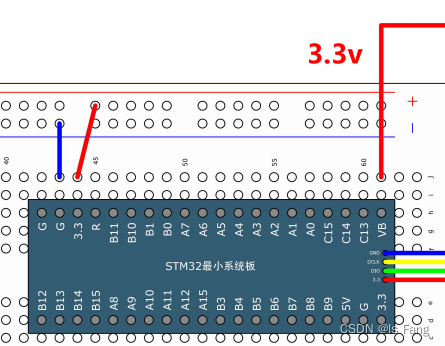
电路设计
关键代码
Key.c
#include "stm32f10x.h" // Device header
#include "Delay.h"void Key_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);GPIO_InitTypeDef GPIO_InitStructure;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);
}uint8_t Key_GetNum(void)
{uint8_t KeyNum = 0;if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0){Delay_ms(20);while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_1) == 0);Delay_ms(20);KeyNum = 1;}if (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0){Delay_ms(20);while (GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11) == 0);Delay_ms(20);KeyNum = 2;}return KeyNum;
}Key.h
#ifndef __KEY_H
#define __KEY_Hvoid Key_Init(void);
uint8_t Key_GetNum(void);#endifmain.c
按下按键,写入备份寄存器,然后再读出来
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Key.h"uint8_t KeyNum;uint16_t ArrayWrite[] = {0x1234, 0x5678};
uint16_t ArrayRead[2];int main(void)
{OLED_Init();Key_Init();OLED_ShowString(1, 1, "W:");OLED_ShowString(2, 1, "R:");//开启PWR和BKP时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE);//在pwrd的库函数中,备份寄存器访问使能,设置PWR_CR的DBP,使能对BKP和RTC的访问PWR_BackupAccessCmd(ENABLE);while (1){KeyNum = Key_GetNum();if (KeyNum == 1){ArrayWrite[0] ++;ArrayWrite[1] ++;BKP_WriteBackupRegister(BKP_DR1, ArrayWrite[0]);//写备份寄存器BKP_WriteBackupRegister(BKP_DR2, ArrayWrite[1]);OLED_ShowHexNum(1, 3, ArrayWrite[0], 4);OLED_ShowHexNum(1, 8, ArrayWrite[1], 4);}ArrayRead[0] = BKP_ReadBackupRegister(BKP_DR1);//读备份寄存器ArrayRead[1] = BKP_ReadBackupRegister(BKP_DR2);OLED_ShowHexNum(2, 3, ArrayRead[0], 4);OLED_ShowHexNum(2, 8, ArrayRead[1], 4);}
}RTC简介
- RTC(Real Time Clock)实时时钟
- RTC是一个独立的定时器,可为系统提供时钟和日历的功能
RTC和时钟配置系统处于后备区域,系统复位时数据不清零,VDD(2.0~3.6V)断电后可借助VBAT(1.8~3.6V)供电继续走时【和BKP一样,属于后备区域】- 32位的可编程计数器,可对应Unix时间戳的秒计数器【简化电路设计】
- 20位的可编程预分频器,可适配不同频率的输入时钟【变成1Hz频率】
- 可选择三种RTC时钟源(PTCCLK):
- HSE时钟除以128(通常为8MHz/128)
- LSE振荡器时钟(通常为32.768KHz)【经过15位分频器自然溢出得到1hz频率】
- LSI振荡器时钟(40KHz)
RTC 复位和主电源掉电后,数据不丢失是BKP来实现的
注意:整个stm32有四个时钟源
- HSE =高速外部时钟信号
- HSI = 高速内部时钟信号
- LSl=低速内部时钟信号【低速时钟供RTC和看门狗】
- LSE =低速外部时钟信号【低速时钟供RTC和看门狗】
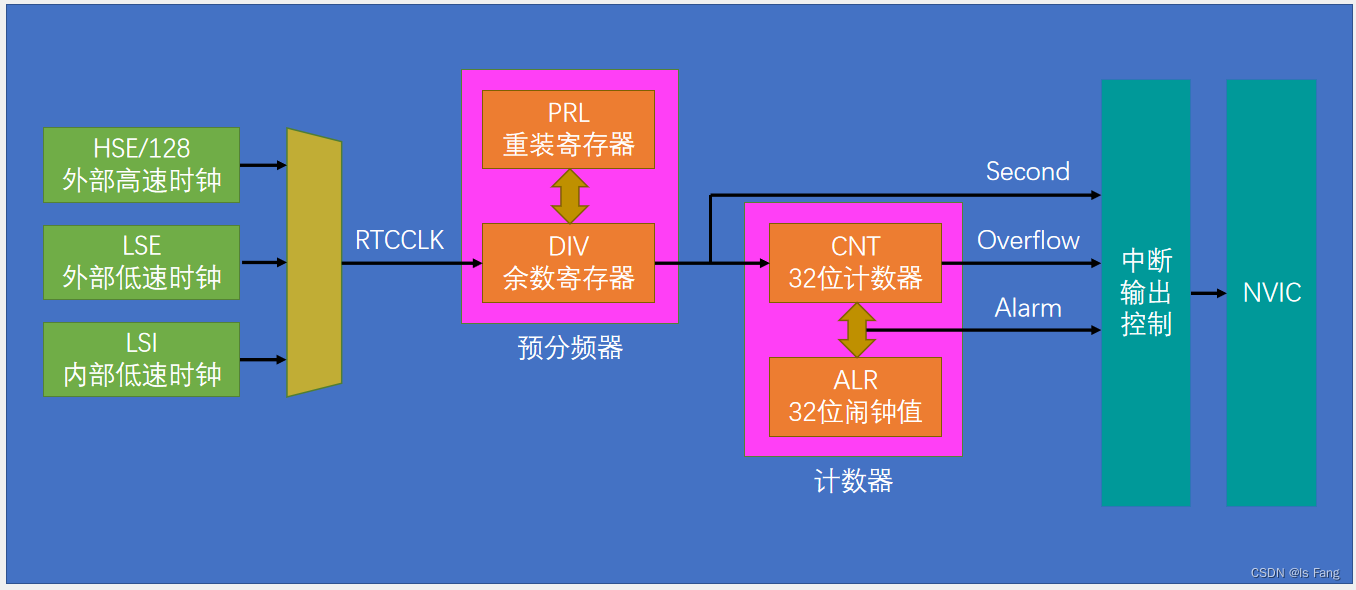
RTC框图
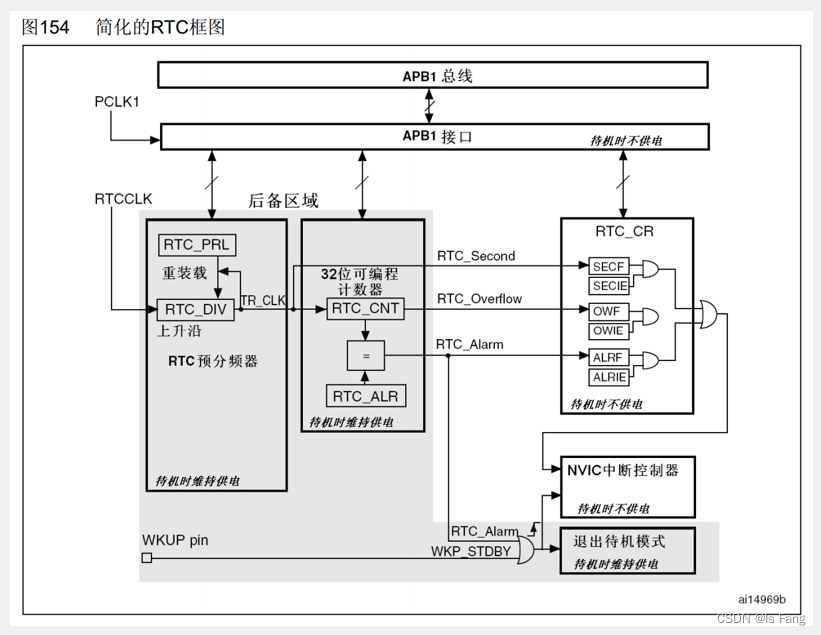
- 灰色区域属于后备区域,待机时会供电
- RTC_ALR是闹钟,当值与RTC_CNT相同时会产生信号,让stm退出待机
- 中断信号有三种:秒中断、计数器溢出中断(2106年中断)、闹钟中断
- 闹钟信号和wkup引脚都可以唤醒设备(10引脚)

- stm32芯片框图,常用32.768KHz,其他两路都是备用方案,主要工作是给系统主时钟和看门狗使用。且中间分频器是可以通过VBAT供电,而另外两路在掉电后时钟会暂停
RTC基本结构
- 余数寄存器是一个自减计数器,存储当前计数值
- 重装寄存器是计数目标,决定分频值
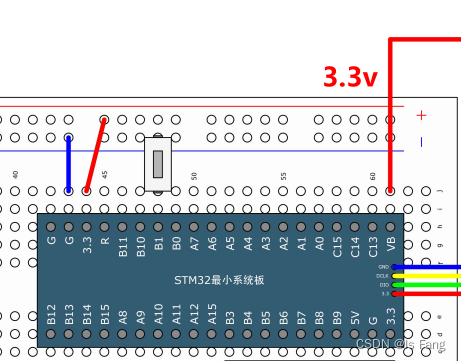
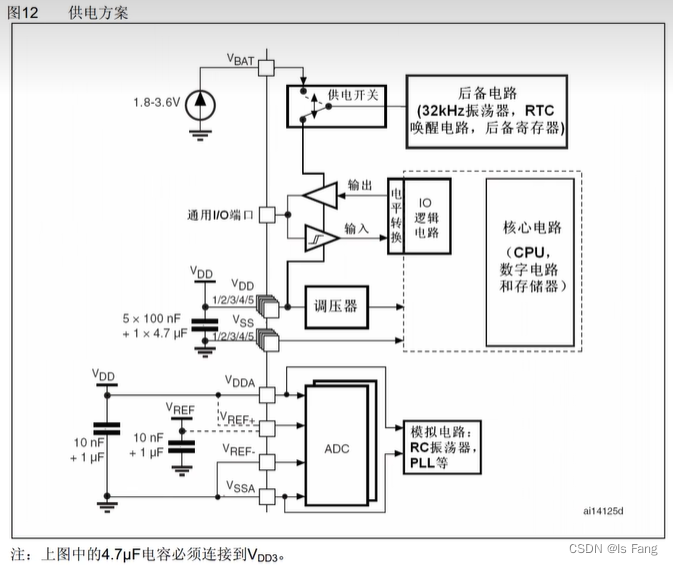
硬件电路
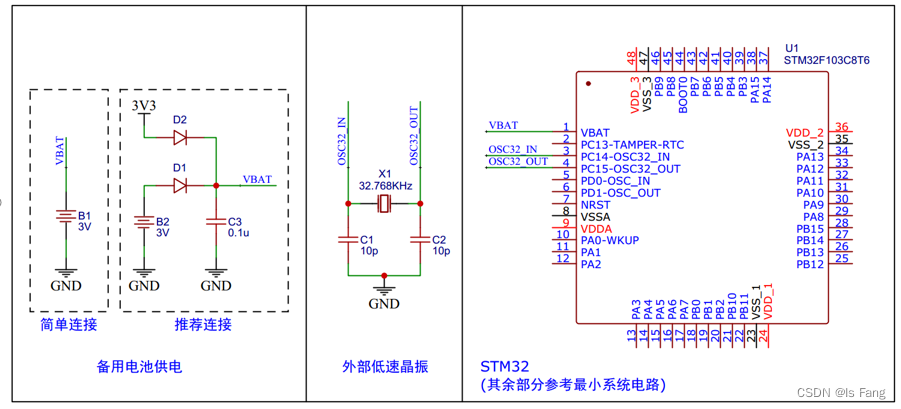
stm内部供电方案中设计了供电开关,有VDD用VDD,没有则用VBAT
stm32自带RTC晶振电路,如图所示是32.768KHz和8MHz的晶振
RTC操作注意事项
- 执行以下操作将使能对BKP和RTC的访问:【初始化要完成如下操作】
- 设置RCC_APB1ENR的PWREN和BKPEN,使能PWR和BKP时钟
- 设置PWR_CR的DBP,使能对BKP和RTC的访问
- 若在读取RTC寄存器时,RTC的APB1接口曾经处于禁止状态,则软件首先必须等待RTC_CRL寄存器中的RSF位(寄存器同步标志)被硬件置1
【等待同步】- PCLK1和RTCCLK两个时钟频率不一致,PCLK1在掉电后会停止,如果使用APB1总线开启就去读RTC的值会读到0,需要等待RTC_CNT内有值
- 必须设置RTC_CRL寄存器中的CNF位,使RTC进入配置模式后,才能写入RTC_PRL、RTC_CNT、RTC_ALR寄存器
- 对RTC任何寄存器的写操作,都必须在前一次写操作结束后进行。可以通过查询RTC_CR寄存器中的RTOFF状态位,判断RTC寄存器是否处于更新中。仅当RTOFF状态位是1时,才可以写入RTC寄存器
【等待上一步完成】
上述注意事项涉及到如下的框图:
PCLK1和RTCCLK两个时钟频率不一致,这会导致读取和写入操作不能立刻在寄存器中,需要通过RTC_CRL寄存器的RSF和CNF位去判断在RTCCLK频率下内部电路是否完成了数据的变动。
读写实时时钟
电路设计
关键代码
MyRTC.c
库函数在rcc和rtc里面
#include "stm32f10x.h" // Device header
#include <time.h>//编译器内置的库函数uint16_t MyRTC_Time[] = {2023, 1, 1, 23, 59, 55};void MyRTC_SetTime(void);void MyRTC_Init(void)
{//开启PWR和BKP时钟RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE);//在pwrd的库函数中,备份寄存器访问使能,设置PWR_CR的DBP,使能对BKP和RTC的访问PWR_BackupAccessCmd(ENABLE);//复位的时候RTC计数器会清零,通过BKP的寄存器可以判断是否使用备用电源,如果使用则RTC始终不用重新初始化if (BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5){RCC_LSEConfig(RCC_LSE_ON);//开启LSE//LSE开启之后不是立马就工作,需要判断一下标志位while (RCC_GetFlagStatus(RCC_FLAG_LSERDY) != SET);RCC_RTCCLKConfig(RCC_RTCCLKSource_LSE);//选择RTCCLK时钟为LSERCC_RTCCLKCmd(ENABLE);//使能//可加可不加下面2行RTC_WaitForSynchro();//等待同步RTC_WaitForLastTask();//等待上一次操作完成RTC_SetPrescaler(32768 - 1);//设置预分频的值、该函数内部会调用RTC_EnterConfigMode()和退出配置的代码,设置RTC_CRL寄存器中的CNF位,此时RTC寄存器都可以被使用RTC_WaitForLastTask();//等待上一次操作完成MyRTC_SetTime();BKP_WriteBackupRegister(BKP_DR1, 0xA5A5);}else{RTC_WaitForSynchro();//等待同步RTC_WaitForLastTask();//等待上一次操作完成}
}//如果LSE无法起振导致程序卡死在初始化函数中
//可将初始化函数替换为下述代码,使用LSI当作RTCCLK
//LSI无法由备用电源供电,故主电源掉电时,RTC走时会暂停
/*
void MyRTC_Init(void)
{RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR, ENABLE);RCC_APB1PeriphClockCmd(RCC_APB1Periph_BKP, ENABLE);PWR_BackupAccessCmd(ENABLE);if (BKP_ReadBackupRegister(BKP_DR1) != 0xA5A5){RCC_LSICmd(ENABLE);while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) != SET);//LSI是40khz,预分频系数为40000-1RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);RCC_RTCCLKCmd(ENABLE);RTC_WaitForSynchro();RTC_WaitForLastTask();RTC_SetPrescaler(40000 - 1);RTC_WaitForLastTask();MyRTC_SetTime();BKP_WriteBackupRegister(BKP_DR1, 0xA5A5);}else{RCC_LSICmd(ENABLE);while (RCC_GetFlagStatus(RCC_FLAG_LSIRDY) != SET);RCC_RTCCLKConfig(RCC_RTCCLKSource_LSI);RCC_RTCCLKCmd(ENABLE);RTC_WaitForSynchro();RTC_WaitForLastTask();}
}*/void MyRTC_SetTime(void)
{time_t time_cnt;struct tm time_date;time_date.tm_year = MyRTC_Time[0] - 1900;time_date.tm_mon = MyRTC_Time[1] - 1;time_date.tm_mday = MyRTC_Time[2];time_date.tm_hour = MyRTC_Time[3];time_date.tm_min = MyRTC_Time[4];time_date.tm_sec = MyRTC_Time[5];//mktime始终是0时区time_cnt = mktime(&time_date) - 8 * 60 * 60;RTC_SetCounter(time_cnt);//写入CNT计数器RTC_WaitForLastTask();//等待上一次操作完成
}void MyRTC_ReadTime(void)
{time_t time_cnt;struct tm time_date;time_cnt = RTC_GetCounter() + 8 * 60 * 60;//RTC_GetCounter读取秒计数器//因为是东八区,多了8*60*60秒time_date = *localtime(&time_cnt);//stm32内置的库函数弃用gmtime函数,只用localtime,同时该函数不能确定时区,始终是0时区MyRTC_Time[0] = time_date.tm_year + 1900;MyRTC_Time[1] = time_date.tm_mon + 1;MyRTC_Time[2] = time_date.tm_mday;MyRTC_Time[3] = time_date.tm_hour;MyRTC_Time[4] = time_date.tm_min;MyRTC_Time[5] = time_date.tm_sec;
}MyRTC.h
#ifndef __MYRTC_H
#define __MYRTC_Hextern uint16_t MyRTC_Time[];void MyRTC_Init(void);
void MyRTC_SetTime(void);
void MyRTC_ReadTime(void);#endifmain.c
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "MyRTC.h"int main(void)
{OLED_Init();MyRTC_Init();OLED_ShowString(1, 1, "Date:XXXX-XX-XX");OLED_ShowString(2, 1, "Time:XX:XX:XX");OLED_ShowString(3, 1, "CNT :");OLED_ShowString(4, 1, "DIV :");while (1){MyRTC_ReadTime();//显示日期OLED_ShowNum(1, 6, MyRTC_Time[0], 4);OLED_ShowNum(1, 11, MyRTC_Time[1], 2);OLED_ShowNum(1, 14, MyRTC_Time[2], 2);//显示时间OLED_ShowNum(2, 6, MyRTC_Time[3], 2);OLED_ShowNum(2, 9, MyRTC_Time[4], 2);OLED_ShowNum(2, 12, MyRTC_Time[5], 2);OLED_ShowNum(3, 6, RTC_GetCounter(), 10);OLED_ShowNum(4, 6, RTC_GetDivider(), 10);//RTC_GetDivider可以获取更加精细的时间}
}参考视频:江科大自化协
相关文章:
STM32——RTC实时时钟
文章目录 Unix时间戳UTC/GMT 时间戳转换BKP简介BKP基本结构读写BKP备份寄存器电路设计关键代码 RTC简介RTC框图RTC基本结构硬件电路RTC操作注意事项读写实时时钟电路设计关键代码 Unix时间戳 Unix 时间戳(Unix Timestamp)定义为从UTC/GMT的1970年1月1日…...
webSocket 开发
1 认识webSocket WebSocket_ohana!的博客-CSDN博客 一,什么是websocket WebSocket是HTML5下一种新的协议(websocket协议本质上是一个基于tcp的协议)它实现了浏览器与服务器全双工通信,能更好的节省服务器资源和带宽…...
c#设计模式-结构型模式 之 代理模式
前言 由于某些原因需要给某对象提供一个代理以控制对该对象的访问。这时,访问对象不适合或者不能直接 引用目标对象,代理对象作为访问对象和目标对象之间的中介。在学习代理模式的时候,可以去了解一下Aop切面编程AOP切面编程_aop编程…...
openpnp - 自动换刀的设置
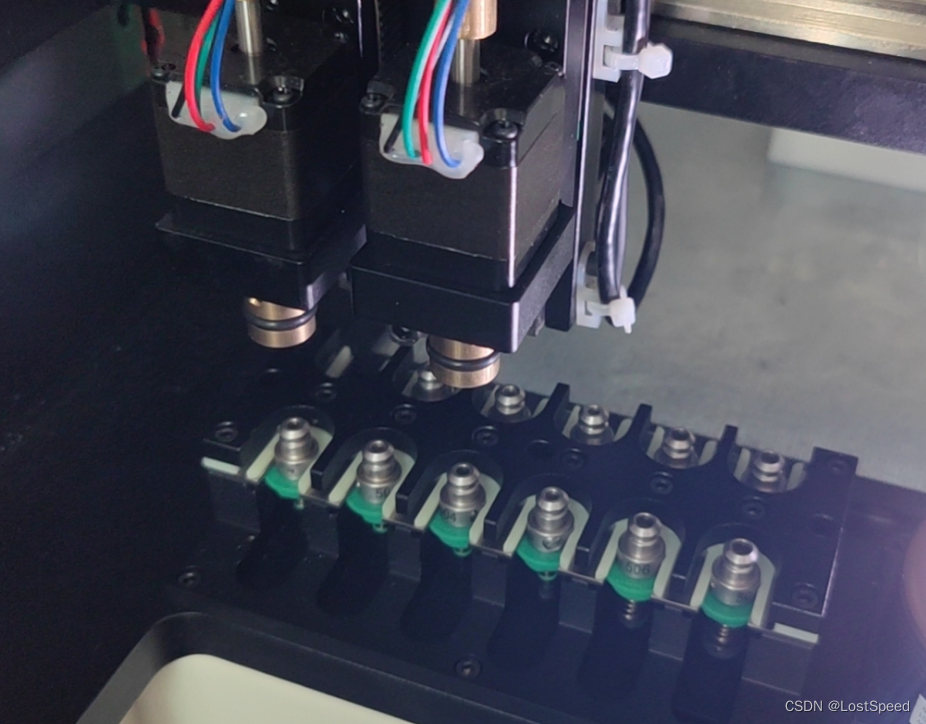
文章目录 openpnp - 自动换刀的设置概述笔记采用的openpnp版本自动换刀库的类型选择自动换刀设置前的注意事项先卸掉吸嘴座上所有的吸嘴删掉所有的吸嘴设置自动换刀的视觉识别设置吸嘴座为自动换刀 - 以N1为例备注补充 - 吸嘴轴差个0.3mm, 就有可能怼坏吸嘴END openpnp - 自动换…...
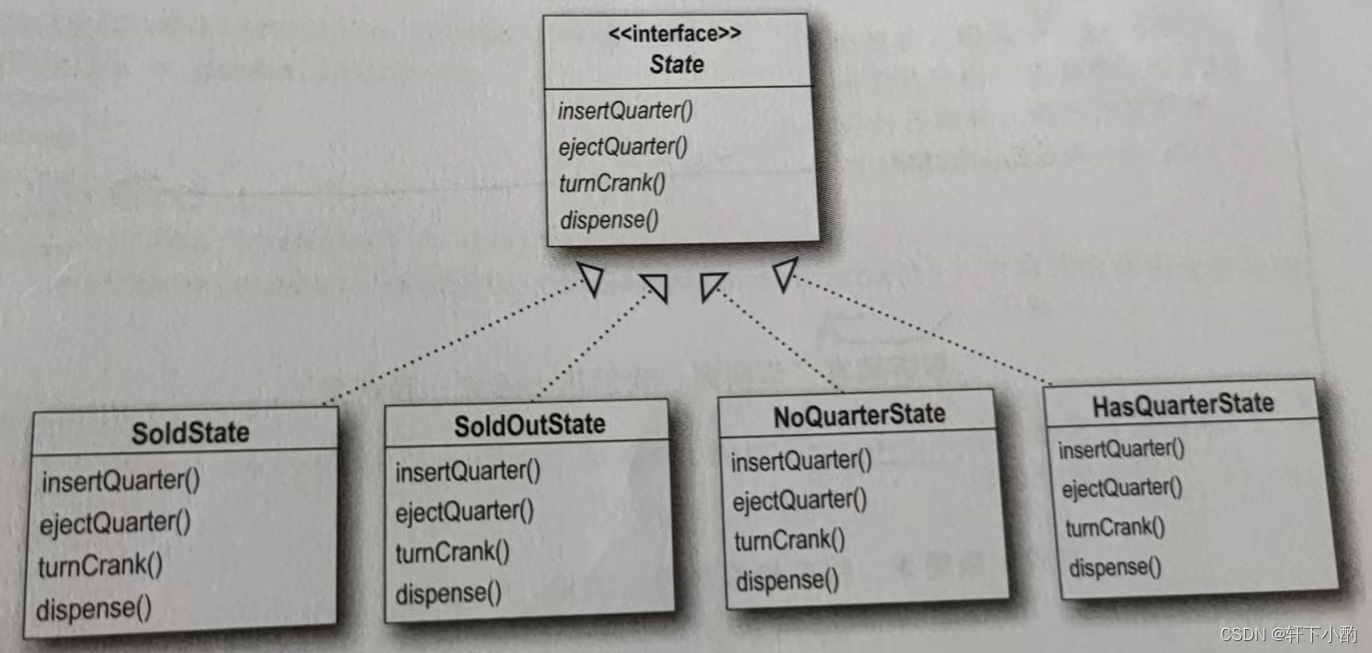
《HeadFirst设计模式(第二版)》第十章代码——状态模式
如下图所示,这是一个糖果机的状态机图,要求使用代码实现: 初始版本: package Chapter10_StatePattern.Origin;/*** Author 竹心* Date 2023/8/19**/public class GumballMachine {final static int SOLD_OUT 0;final static int…...
day-25 代码随想录算法训练营(19)回溯part02
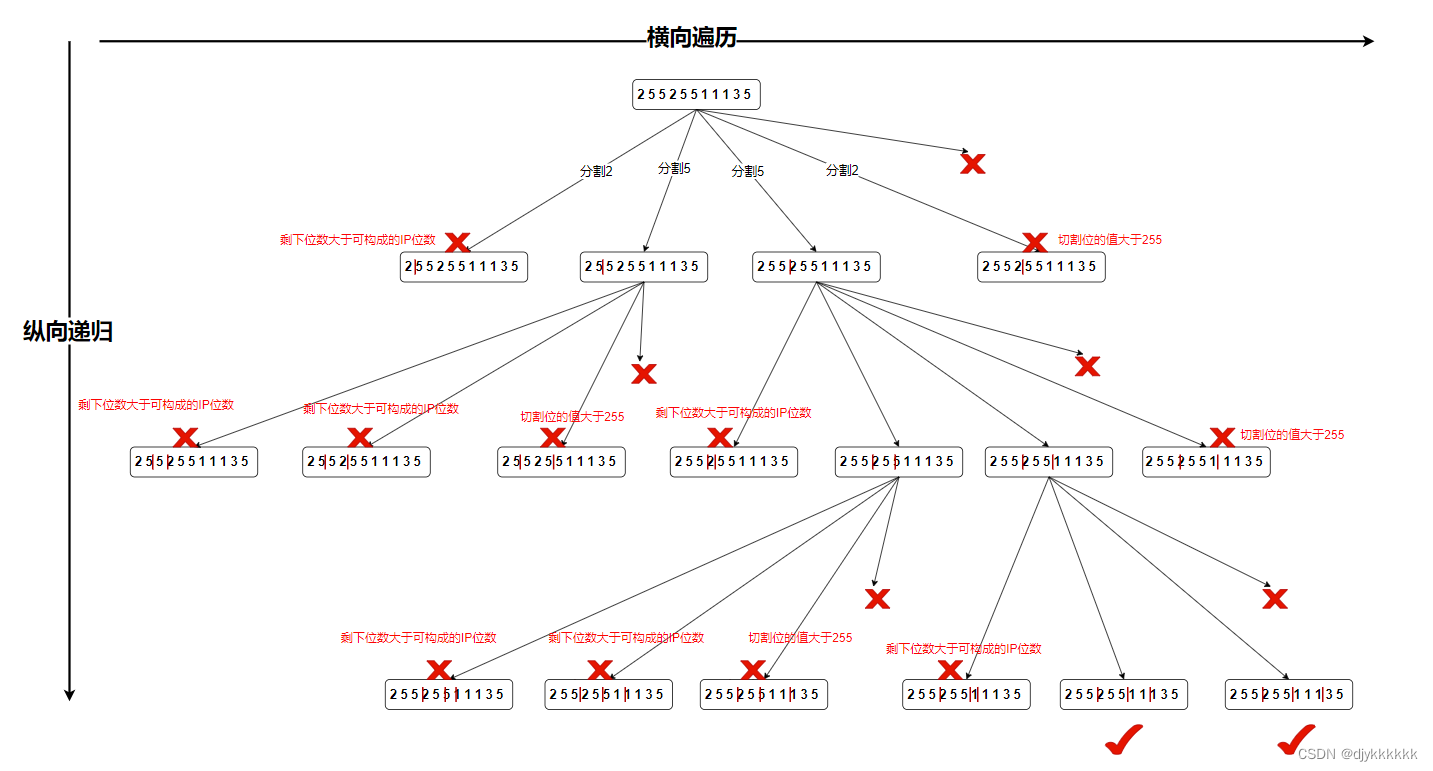
216.组合总和||| 思路:和上题一样,差别在于多了总和,但是数字局限在1-9 17.电话号码的字母组合 思路:先纵向遍历第i位电话号码对于的字符串,再横向递归遍历下一位电话号码 93.复原IP地址 画图分析: 思…...

PG逻辑备份与恢复
文章目录 创建测试数据pg_dump 备份pg_restore 恢复pg_restore 恢复并行备份的文件PG 只导出指定函数 创建测试数据 drop database if exists test; create database test ; \c test create table t1(id int primary key); create table t2(id serial primary key, name varch…...
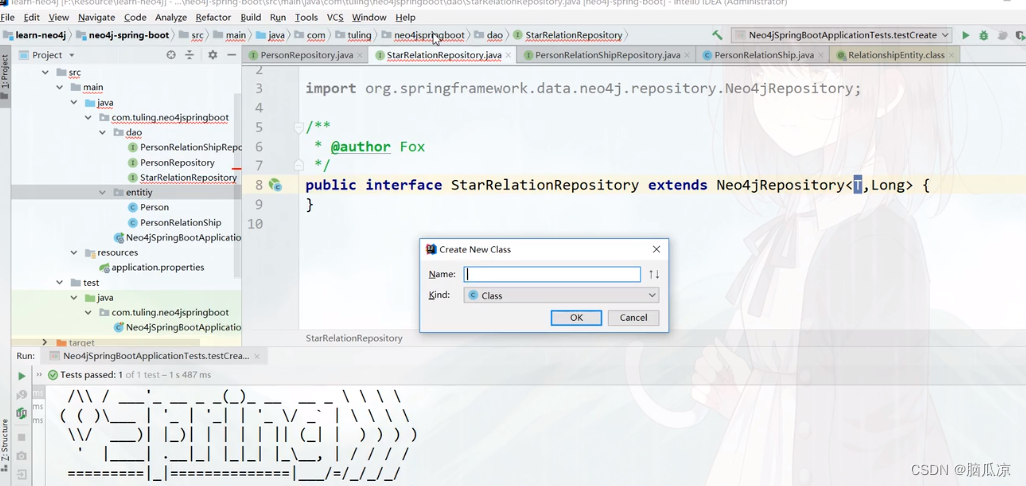
图数据库_Neo4j和SpringBoot整合使用_实战创建明星关系图谱---Neo4j图数据库工作笔记0010
然后我们再来看一下这个明星关系图谱 可以看到这里 这个是原来的startRelation 我们可以写CQL去查询对应的关系 可以看到,首先查询出来以后,然后就可以去创建 我们可以把写的创建明星关系的CQL,拿到 springboot中去执行 可以看到,这里我们先写一个StarRelationRepository,然…...
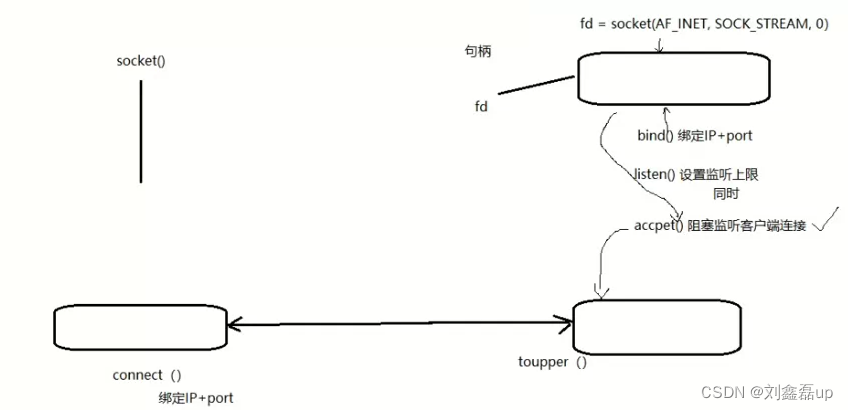
Linux网络编程:Socket套接字编程(Server服务器 Client客户端)
文章目录: 一:定义和流程分析 1.定义 2.流程分析 3.网络字节序 二:相关函数 IP地址转换函数inet_pton inet_ntop(本地字节序 网络字节序) socket函数(创建一个套接字) bind函数(给socket绑定一个服务器地址结…...

Mac OS下应用Python+Selenium实现web自动化测试
在Mac环境下应用PythonSelenium实现web自动化测试 在这个过程中要注意两点: 1.在终端联网执行命令“sudo pip install –U selenium”如果失败了的话,可以尝试用命令“sudo easy_install selenium”来安装selenium; 2.安装好PyCharm后新建project&…...
每天一道leetcode:934. 最短的桥(图论中等广度优先遍历)
今日份题目: 给你一个大小为 n x n 的二元矩阵 grid ,其中 1 表示陆地,0 表示水域。 岛 是由四面相连的 1 形成的一个最大组,即不会与非组内的任何其他 1 相连。grid 中 恰好存在两座岛 。 你可以将任意数量的 0 变为 1 &#…...
【学习日记】【FreeRTOS】FreeRTOS 移植到 STM32F103C8
前言 本文基于野火 FreeRTOS 教程,内容是关于 FreeRTOS 官方代码的移植的注意事项,并将野火例程中 STM32F103RC 代码移植到 STM32F103C8。 一、FreeRTOS V9.0.0 源码的获取 两个下载链接: 官 网 代码托管 二、源码文件夹内容简介 Source…...

Qt 屏幕偶发性失灵
项目场景: 基于NXP i.mx7的Qt应用层项目开发,通过goodix使用触摸屏,走i2c协议。 问题描述 触摸屏使用过程中意外卡死,现场分为多种: i2c总线传输错误,直观表现为触摸屏无效,任何与触摸屏挂接在同一总线上的i2c设备,均受到干扰,并且在传输过程中内核报错以下代码: G…...
如何在pycharm中指定GPU
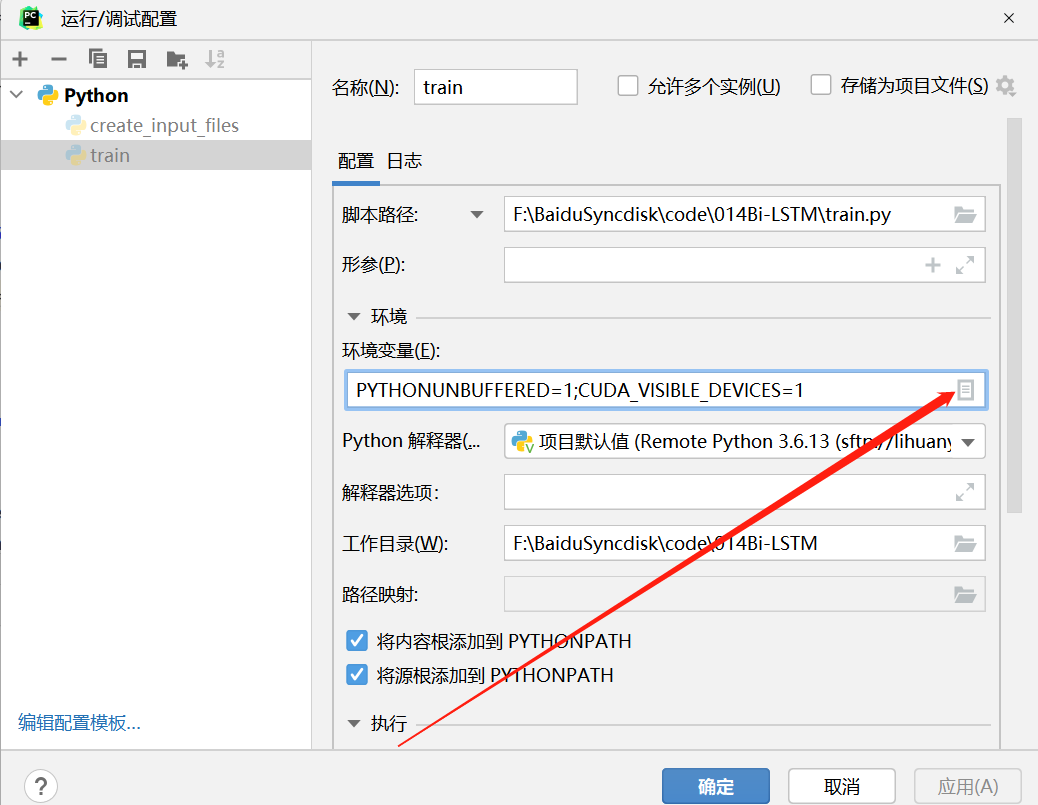
如何在pycharm中指定GPU 作者:安静到无声 个人主页 目录 如何在pycharm中指定GPU打开编辑配置点击环境变量添加GPU配置信息推荐专栏在Pycharm运行程序的时候,有时候需要指定GPU,我们可以采用以下方式进行设置: 打开编辑配置 点击环境变量 添加GPU配置信息 添加名称:CU…...

C#判断字符串中有没有字母,正则表达式、IsLetter
要判断字符串中是否包含字母,可以使用正则表达式或者循环遍历字符串的方式。 方法一:使用正则表达式 using System.Text.RegularExpressions;string input "Hello123"; bool containsLetter Regex.IsMatch(input, "[a-zA-Z]");上…...

Jtti:Ubuntu怎么限制指定端口和IP访问
在 Ubuntu 系统中,可以使用防火墙规则来限制特定的端口和IP访问。常用的防火墙管理工具是 iptables,以下是使用 iptables 来限制指定端口和IP访问的步骤: 安装 iptables: 如果系统中没有安装 iptables,可以使用以下命…...

机器学习/深度学习需要掌握的linux基础命令
很多深度学习/机器学习/数据分析等领域(或者说大多数在Python环境下进行操作的领域)的初学者入门时是在Windows上进行学习,也得益于如Anaconda等工具把环境管理做的如此友善 但如果想在该领域继续深耕,一定会与Linux操作系统打交…...

C++11 std::async推荐使用 std::launch::async 模式
async真假多线程 std::launch::async真多线程 std::launch::async | std::launch::deferred可能多线程 std::launch::deferred假多线程 枚举变量说明 枚举定义 enum class launch {async 1, // 0b1deferred 2, // 0b10any async | def…...

没有使用springboot 单独使用spring-boot-starter-logging
如果您不使用Spring Boot框架,但想单独使用Spring Boot Starter Logging,您可以按照以下步骤进行: 1. 添加Maven依赖: <dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boo…...
创建Azure资源锁
锁的介绍 在Azure中,资源锁是一种用于保护订阅、资源组或者单个资源的机制。它可以防止对受锁定的资源进行删除或修改操作,帮助确保资源的连续可用性和安全性。 Azure中的资源锁可以分为两种类型: 删除锁(CanNotDelete…...

从DesignCon 2011看EDA技术演进:高速链路、低功耗与3D-IC设计启示
1. 从一场行业盛会看电子设计的未来风向每年年初,硅谷的心脏地带——加州圣克拉拉,都会迎来一场电子设计自动化(EDA)与半导体设计领域的年度盛事:DesignCon。对于像我这样在硬件设计领域摸爬滚打了十几年的工程师来说&…...

国产替代之SFT1452-TL-W与VBE1251K参数对比报告
N沟道功率MOSFET参数对比分析报告一、产品概述SFT1452-TL-W:安森美(onsemi)N沟道硅功率MOSFET,耐压250V,低导通电阻,低输入电容,采用10V驱动,符合无卤素标准,具有ESD二极…...

维他动力获5亿Pre-A轮启动人形研发;优必选与日立达成合作人形机器人赋能制造; 前小米高管创业工业通用具身大脑小雨智造获B+轮融资
1. 维他动力获5亿Pre-A轮启动人形研发牛喀网获悉,Vbot维他动力正式完成近5亿元Pre-A轮融资,创下当前消费级具身智能领域的最大单笔融资纪录,本轮由东方嘉富、华泰紫金、复星锐正联合领投,上汽旗下尚颀资本等机构参投。技术层面&am…...

Claude集成Spring Boot全链路实践:从零搭建智能API网关的7步标准化流程
更多请点击: https://intelliparadigm.com 第一章:Claude集成Spring Boot全链路实践:从零搭建智能API网关的7步标准化流程 环境准备与依赖声明 确保 JDK 17、Maven 3.8 和 Spring Boot 3.2.x 基础环境就绪。在 pom.xml 中引入 Claude 官方…...
bittorrent-tracker与WebTorrent生态:现代浏览器P2P下载的终极指南 [特殊字符]
bittorrent-tracker与WebTorrent生态:现代浏览器P2P下载的终极指南 🌊 【免费下载链接】bittorrent-tracker 🌊 Simple, robust, BitTorrent tracker (client & server) implementation 项目地址: https://gitcode.com/gh_mirrors/bit/…...

Narrative-craft:工程化叙事框架的设计、实现与集成指南
1. 项目概述与核心价值最近在GitHub上看到一个挺有意思的项目,叫“Narrative-craft”,作者是chengjialu8888。光看名字,你可能会觉得这又是一个讲“叙事”或者“故事创作”的抽象工具。但点进去仔细研究后,我发现它远不止于此。这…...

InputTip:提升表单体验的动态输入引导组件设计与实战
1. 项目概述:一个被低估的输入增强工具 在桌面应用开发中,我们常常会花费大量精力去构建复杂的业务逻辑和炫酷的界面,却容易忽略一个直接影响用户体验的细节: 输入引导 。回想一下,你是否遇到过这样的场景࿱…...
)
从ENVI SARscape到SNAP:手把手教你迁移哨兵1 GRD数据预处理流程(含避坑指南)
从ENVI SARscape到SNAP:哨兵1 GRD数据预处理全流程迁移实战 当雷达遥感领域的工具生态逐渐向开源化倾斜,许多长期依赖ENVI SARscape的研究者开始面临工具迁移的挑战。本文将聚焦哨兵1号GRD数据的预处理流程,为需要从商业软件转向开源工具的用…...

API淘宝关键词搜索:运用场所、使用方式及获客逻辑
在电商生态中,淘宝关键词搜索API是连接第三方系统与平台商品数据的核心桥梁。其核心价值在于通过标准化接口,精准、合规地获取关键词对应的商品、店铺及市场数据,为各类业务提供坚实的数据支撑。相较于传统爬虫,API调用具备合规性…...

Python 爬虫高级实战:爬虫接口限流自适应调节
前言 网络目标站点普遍具备严格的接口访问限流、频率校验、IP 频次风控、接口令牌校验等防护机制,常规固定延时、固定并发的爬虫模式极易触发封禁、接口 429 限流、会话失效、IP 拉黑等问题。人工配置延时、手动调整并发阈值的传统方式,无法适配站点动态…...