点亮一颗LED灯
TOC


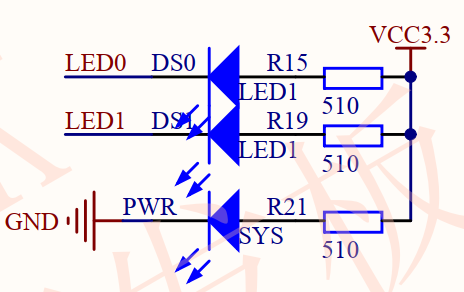
LED0
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能APB2的外设时钟GPIO_InitTypeDef GPIO_Initstructure;GPIO_Initstructure.GPIO_Mode = GPIO_Mode_Out_PP;//通用推挽输出GPIO_Initstructure.GPIO_Pin = GPIO_Pin_5;GPIO_Initstructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_Initstructure);//配置端口模式GPIO_SetBits(GPIOB,GPIO_Pin_5);//关闭LED灯
LED1
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);//使能APB2的外设时钟GPIO_InitTypeDef GPIO_Initstructure;GPIO_Initstructure.GPIO_Mode = GPIO_Mode_Out_PP;//通用推挽输出GPIO_Initstructure.GPIO_Pin = GPIO_Pin_5;GPIO_Initstructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOE,&GPIO_Initstructure);//配置端口模式GPIO_SetBits(GPIOE,GPIO_Pin_5);//关闭LED灯
Periph---------Peripherals—[pəˈrɪfərəlz]—外设
Hardware中添加LED.C和LED.h文件
LED.h文件中,添加一段防止头文件重复的代码
LED.h
#ifndef __LED_H
#define __LED_H
void LED1_Init(void);
void LED0_Init(void);
void LED1_On(void);
void LED1_Off(void);
void LED1_Turn(void);
void LED0_On(void);
void LED0_Off(void);
void LED0_Turn(void);
#endif注意最后一行空
LED.c
LED.C 文件中,右键添加“stm32f10x.h”头文件
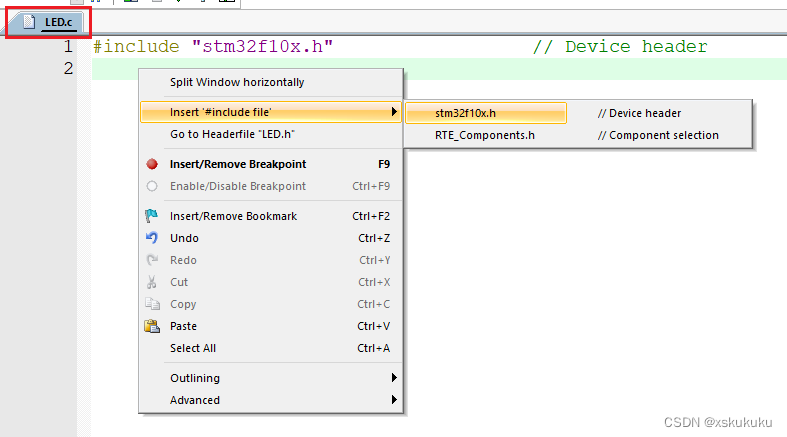
#include "stm32f10x.h" // Device header
void LED1_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOE,ENABLE);GPIO_InitTypeDef GPIO_Initstructure;GPIO_Initstructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Initstructure.GPIO_Pin=GPIO_Pin_5;GPIO_Initstructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOE,&GPIO_Initstructure);GPIO_SetBits(GPIOE,GPIO_Pin_5);
}
void LED0_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);GPIO_InitTypeDef GPIO_Initstructure;GPIO_Initstructure.GPIO_Mode=GPIO_Mode_Out_PP;GPIO_Initstructure.GPIO_Pin=GPIO_Pin_5;GPIO_Initstructure.GPIO_Speed=GPIO_Speed_50MHz;GPIO_Init(GPIOB,&GPIO_Initstructure);GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
void LED1_On(void)
{GPIO_ResetBits(GPIOE,GPIO_Pin_5);
}
void LED1_Off(void)
{GPIO_SetBits(GPIOE,GPIO_Pin_5);
}
void LED1_Turn(void)
{if(GPIO_ReadOutputDataBit(GPIOE,GPIO_Pin_5) == 1){GPIO_ResetBits(GPIOE,GPIO_Pin_5);}else{GPIO_SetBits(GPIOE,GPIO_Pin_5);}
}
void LED0_On(void)
{GPIO_ResetBits(GPIOB,GPIO_Pin_5);
}
void LED0_Off(void)
{GPIO_SetBits(GPIOB,GPIO_Pin_5);
}
void LED0_Turn(void)
{if(GPIO_ReadOutputDataBit(GPIOB,GPIO_Pin_5) == 1){GPIO_ResetBits(GPIOB,GPIO_Pin_5);}else{GPIO_SetBits(GPIOB,GPIO_Pin_5);}
}相关文章:
点亮一颗LED灯
TOC LED0 RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能APB2的外设时钟GPIO_InitTypeDef GPIO_Initstructure;GPIO_Initstructure.GPIO_Mode GPIO_Mode_Out_PP;//通用推挽输出GPIO_Initstructure.GPIO_Pin GPIO_Pin_5;GPIO_Initstructure.GPIO_Speed GPIO_S…...
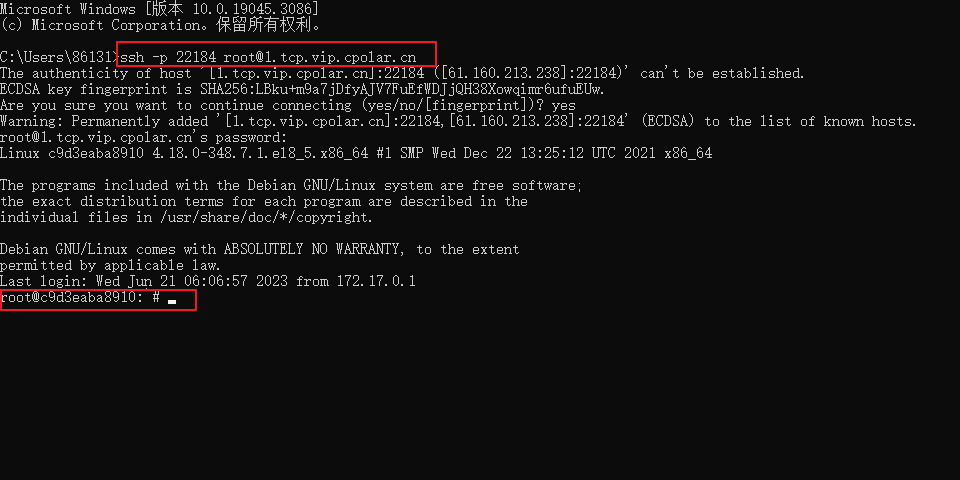
SSH远程直连--------------Docker容器
文章目录 1. 下载docker镜像2. 安装ssh服务3. 本地局域网测试4. 安装cpolar5. 配置公网访问地址6. SSH公网远程连接测试7.固定连接公网地址8. SSH固定地址连接测试 在某些特殊需求下,我们想ssh直接远程连接docker 容器,下面我们介绍结合cpolar工具实现ssh远程直接连接docker容器…...
———— html5和css3.html基础)
Python/Spring Cloud Alibaba开发--前端复习笔记(1)———— html5和css3.html基础
Python/Spring Cloud Alibaba开发–前端复习笔记(1)———— html5和css3.html基础 1)概述和基本结构 超文本标记语言。超文本指超链接,标记指的是标签。 基本结构: <!DOCTYPE html> 文档声明 <html lang”en”>…...
视频处理)
open cv学习 (十一)视频处理
视频处理 demo1 import cv2 # 打开笔记本内置摄像头 capture cv2.VideoCapture(0) # 笔记本内置摄像头被打开 while capture.isOpened():# 从摄像头中实时读取视频retval, image capture.read()# 在窗口中实时显示读取到的视频cv2.imshow("Video", image)# 等到用…...
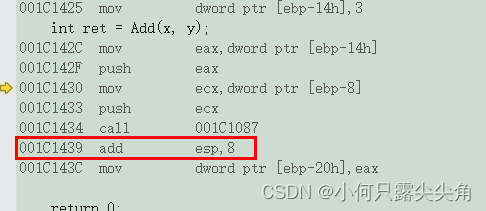
函数栈帧理解
本文是从汇编角度来展示的函数调用,而且是在vs2013下根据调试展开的探究,其它平台在一些指令上会有点不同,指令不多,简单记忆一下即可,在我前些年的学习中,学的这几句汇编指令对我调试找错误起了不小的作用…...

【SA8295P 源码分析】70 - QAM8295P 原理图参考设计 之 DP、eDP 接口硬件原理分析
【SA8295P 源码分析】70 - QAM8295P 原理图参考设计 之 DP、eDP 接口硬件原理分析 一、DP 接口(Display Port)介绍二、高通参考硬件原理图分析2.1 高通 Display 接口框图介绍2.2 DP接口 Pin 定义介绍2.3 高通参考设计:DP2、DP3 硬件原理图2.4 高通参考设计:eDP0、eDP1 硬件…...

【CSS动画02--卡片旋转3D】
CSS动画02--卡片旋转3D 介绍代码HTMLCSS css动画02--旋转卡片3D 介绍 当鼠标移动到中间的卡片上会有随着中间的Y轴进行360的旋转,以下是几张图片的介绍,上面是鄙人自己录得一个供大家参考的小视频🤭 代码 HTML <!DOCTYPE html>…...
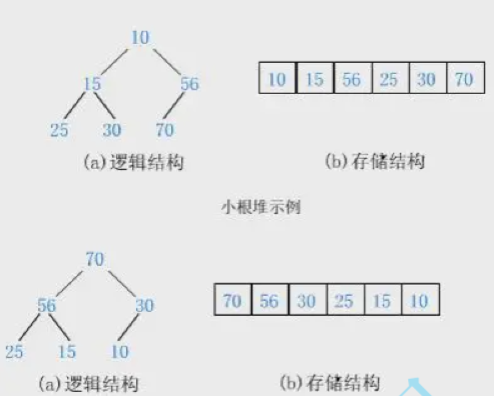
数据结构<树和二叉树>顺序表存储二叉树实现堆排
✨Blog:🥰不会敲代码的小张:)🥰 🉑推荐专栏:C语言🤪、Cpp😶🌫️、数据结构初阶💀 💽座右铭:“記住,每一天都是一個新的開始…...

理解docker命令
基础命令 帮助命令 docker --help(帮助命令) 用于获取某个命令的帮助信息 #命令帮助 docker 命令 --help 小技巧 换行符 \ 使用命令换符,可以让繁杂命令变得有条理 #命令换行,使用换行符 \ docker ... \... \ 镜像命令 d…...
线程函数 tp_recv_thread 源码分析)
【SA8295P 源码分析】16 - QNX侧 TouchScreen Panel (TP)线程函数 tp_recv_thread 源码分析
【SA8295P 源码分析】16 - QNX侧 TouchScreen Panel (TP)线程函数 tp_recv_thread 源码分析 一、TP 线程函数:tp_recv_thread()二、处理&上报 坐标数据 cypress_read_touch_data()系列文章汇总见:《【SA8295P 源码分析】00 - 系列文章链接汇总》 本文链接:《【SA8295P…...

第九章MyBatis的技巧
${}和#{}的区别 #{}给sql语句的占位符传值${}直接将值拼接到sql语句上,存在sql注入的现象 什么时候用${} 需要先对sql语句拼接,然后再编译。 字符串排序字段向SQL语句中拼接表名。比如根据日期生成日志表 批量删除 delete from car where in(${ids}…...

计算机技术与软件专业技术资格(水平)考试----系统架构设计师
【原文链接】计算机技术与软件专业技术资格(水平)考试----系统架构设计师 考试简介 计算机软件资格考试是由国家人力资源和社会保障部、工业和信息化部领导下的国家级考试。计算机软件资格考试既是职业资格考试,又是职称资格考试。考试合格…...

使用nrm快速切换npm源以及解决Method Not Implemented
文章目录 什么是nrm如何使用nrm查看本机目前使用的npm 源安装nrm查看可选源查看当前使用源切换源添加源删除源测试源的响应时间 如果你遇到这个报错,就可以采用这种方案解决哦解决方案:1. 切换为官方源2. 查看漏洞3. 修复漏洞4. 下面命令慎重使用&#x…...
NVIDIA Jetson 项目:机器人足球比赛
推荐:使用 NSDT场景编辑器 助你快速搭建可二次编辑器的3D应用场景 事实上,整个比赛都致力于这个想法。RoboCup小型联盟(SSL)视觉停电技术挑战赛鼓励团队“探索本地传感和处理,而不是非车载计算机和全球摄像机感知环境的…...
【论文解读】Hybrid-SORT: Weak Cues Matter for Online Multi-Object Tracking
因为Hybrid-SORT的baseline是基于OCSORT进行改进的,在这之前建议先了解byteTrack和【】的相关知识 1.介绍 1.1 基本框架 多目标跟踪(MOT)将问题分为两个子任务。第一个任务是检测每个帧中的对象。第二个任务是将它们在不同的框架中联系起来。关联任务主要通过显式…...
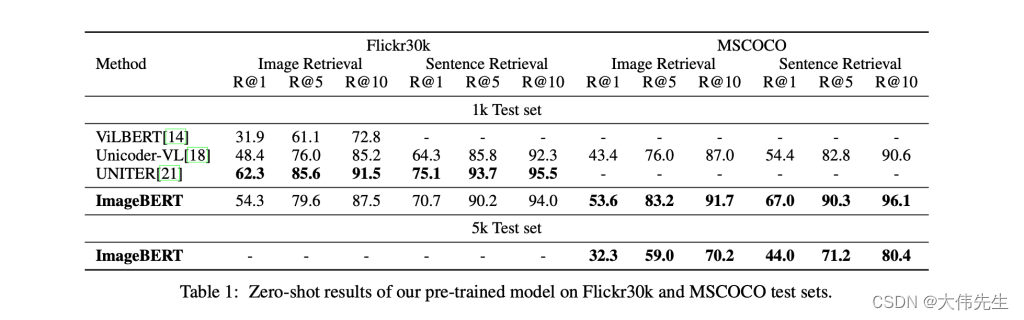
Microsoft 图像BERT,基于大规模图文数据的跨模态预训练
视觉语言任务是当今自然语言处理(NLP)和计算机视觉领域的热门话题。大多数现有方法都基于预训练模型,这些模型使用后期融合方法融合下游任务的多模态输入。然而,这种方法通常需要在训练期间进行特定的数据注释,并且对于…...

vue3+elementUI-plus实现select下拉框的虚拟滚动
网上查了几个方案,要不就是不兼容,要不就是不支持vue3, 最终找到一个合适的,并且已上线使用,需要修改一下样式: 代码如下: main.js里引用 import vue3-virtual-scroller/dist/vue3-virtual-scroller.css; …...
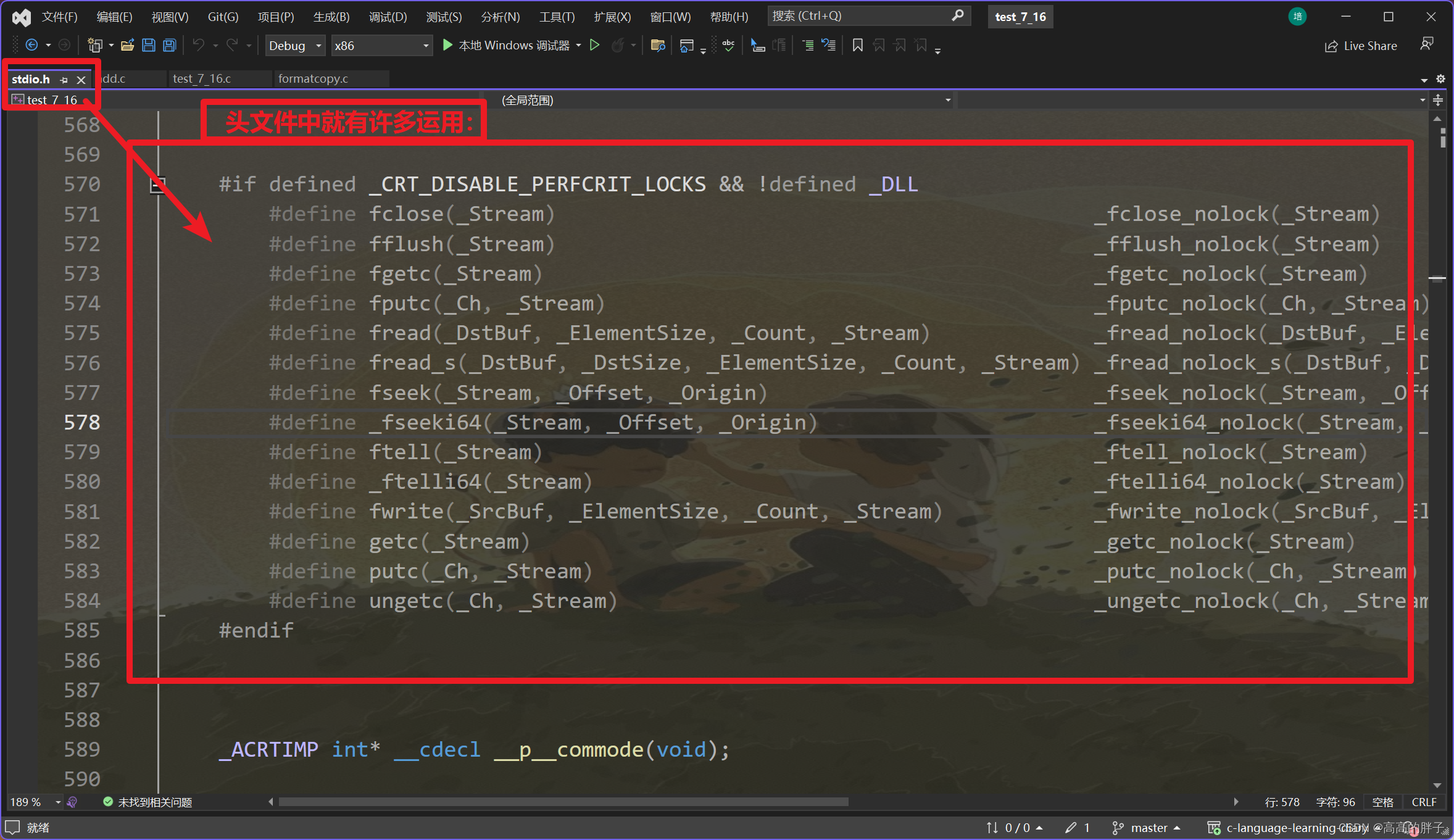
学C的第三十四天【程序环境和预处理】
相关代码gitee自取: C语言学习日记: 加油努力 (gitee.com) 接上期: 学C的第三十三天【C语言文件操作】_高高的胖子的博客-CSDN博客 1 . 程序的翻译环境和执行环境 在ANSI C(C语言标准)的任何一种实现中,存在两个不同的环境。 ࿰…...
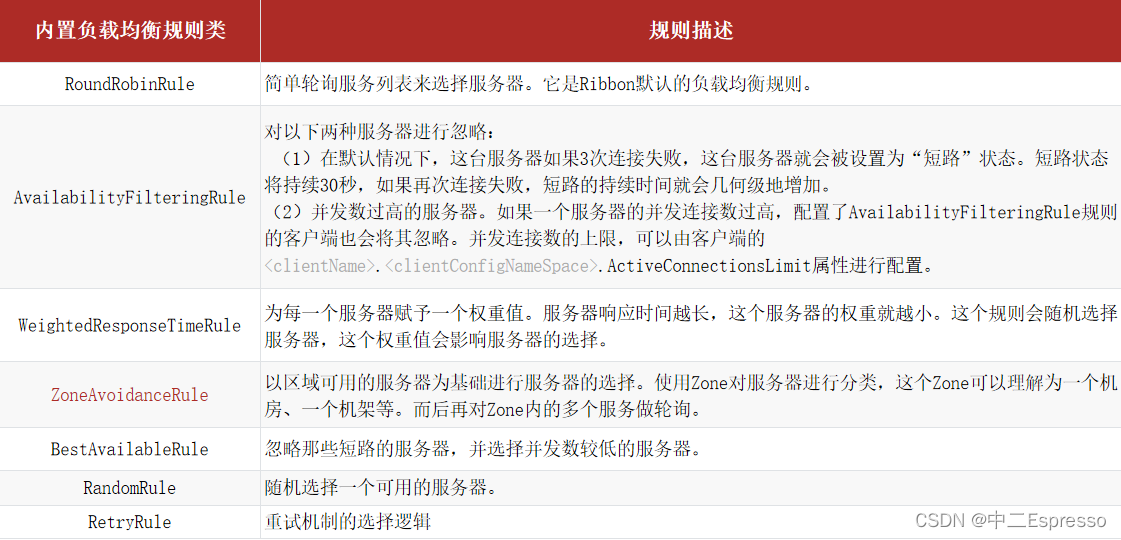
微服务中间件--Ribbon负载均衡
Ribbon负载均衡 a.Ribbon负载均衡原理b.Ribbon负载均衡策略 (IRule)c.Ribbon的饥饿加载 a.Ribbon负载均衡原理 1.发起请求http://userservice/user/1,Ribbon拦截该请求 2.Ribbon通过EurekaServer拉取userservice 3.EurekaServer返回服务列表给Ribbon做负载均衡 …...

字符设备驱动实例(ADC驱动)
四、ADC驱动 ADC是将模拟信号转换为数字信号的转换器,在 Exynos4412 上有一个ADC,其主要的特性如下。 (1)量程为0~1.8V。 (2)精度有 10bit 和 12bit 可选。 (3)采样时钟最高为5MHz,转换速率最高为1MSPS (4)具有四路模拟输入,同一时…...

专业右键菜单管理:用ContextMenuManager一键重塑Windows操作效率
专业右键菜单管理:用ContextMenuManager一键重塑Windows操作效率 【免费下载链接】ContextMenuManager 🖱️ 纯粹的Windows右键菜单管理程序 项目地址: https://gitcode.com/gh_mirrors/co/ContextMenuManager 在Windows生态中,右键菜…...

如何快速掌握WarcraftHelper:魔兽争霸III终极辅助工具完整指南
如何快速掌握WarcraftHelper:魔兽争霸III终极辅助工具完整指南 【免费下载链接】WarcraftHelper Warcraft III Helper , support 1.20e, 1.24e, 1.26a, 1.27a, 1.27b 项目地址: https://gitcode.com/gh_mirrors/wa/WarcraftHelper 还在为魔兽争霸III的画面拉…...

小米Agent岗二面:你们 RAG 知识库上线之后,文档更新了怎么办?
👔面试官:你们 RAG 知识库上线之后,文档更新了怎么办?总不能每次改个文档就把整个知识库重建一遍吧。 🙋♂️我:可以直接找到变了的那个 chunk,更新它的向量就行了。 👔面试官&a…...
)
告别单调!用LVGL Button控件打造3种高级交互动效(附完整C代码)
用LVGL Button控件实现高级交互动效的实战指南 在嵌入式设备上打造流畅、生动的用户界面一直是开发者的挑战。LVGL作为轻量级图形库,其Button控件的基础功能虽然简单,但通过巧妙运用样式和动画API,可以实现媲美移动端的高级交互效果。本文将深…...

深入解析Trust Layer:声明式信任管理在微服务架构中的工程实践
1. 项目概述与核心价值最近在开源社区里,一个名为openclawunboxed/trust-layer的项目引起了我的注意。乍一看这个标题,可能会觉得有些抽象——“信任层”?这听起来像是一个偏学术或理论性的概念。但当我深入其代码仓库和设计文档后࿰…...

将Taotoken作为内部AI中台统一对接各类客户端工具
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 将Taotoken作为内部AI中台统一对接各类客户端工具 设想一个中型研发团队,内部已经引入了Claude Code、OpenClaw等多种A…...

HDiffPatch实际应用案例:APK文件差异化和Android应用商店优化
HDiffPatch实际应用案例:APK文件差异化和Android应用商店优化 【免费下载链接】HDiffPatch a C\C library and command-line tools for Diff & Patch between binary files or directories(folder); cross-platform; runs fast; create small delta/differentia…...

Shoelace自动加载器:终极懒加载Web组件完整指南 [特殊字符]
Shoelace自动加载器:终极懒加载Web组件完整指南 🚀 【免费下载链接】shoelace Shoelace is now Web Awesome. Come see what’s new! 项目地址: https://gitcode.com/gh_mirrors/sh/shoelace Shoelace自动加载器是Shoelace Web组件库中一个革命性…...
)
保姆级教程:用MNN在Android上部署你的第一个图像分类App(从模型转换到实时摄像头识别)
从零构建Android端智能图像分类应用:MNN实战全流程解析 在移动互联网时代,将AI能力嵌入移动端应用已成为提升用户体验的关键。想象一下这样的场景:用户打开手机就能实时识别植物种类、辨别商品真伪,或是自动分类相册中的照片——这…...

网络安全入门:2026年转行网络安全完整路径图
网络安全入门:2026 年转行网络安全完整路径图 导语:2026 年,网络安全人才缺口达 150 万,平均薪资较传统 IT 岗位高出 30%。但 70% 的转行者因路径不清晰而失败。本文详解 2026 年转行网络安全的完整路径:学习路线、证…...