Android通过OpenCV实现相机标定
在 Android 中使用 OpenCV 实现相机标定,你可以按照以下步骤进行操作:
-
首先,确保你已经在项目中引入了 OpenCV 库的依赖。
-
创建一个 CameraCalibrator 类,用于执行相机标定。
import org.opencv.calib3d.Calib3dimport org.opencv.core.CvType.CV_32Fimport org.opencv.core.CvType.CV_64Fimport org.opencv.core.Matimport org.opencv.core.MatOfPoint2fimport org.opencv.core.MatOfPoint3fimport org.opencv.core.Sizeclass CameraCalibrator {private val objectPoints = ArrayList<Mat>()private val imagePoints = ArrayList<Mat>()private var imageSize = Size()var cameraMatrix = Mat(3, 3, CV_64F)private var distortionCoefficients = Mat(5, 1, CV_64F)// 添加一组图像点和对应的物理世界点fun addObjectPoint(objectPoint: Mat) {objectPoints.add(objectPoint)}fun addImagePoint(imagePoint: Mat) {imagePoints.add(imagePoint)}执行相机标定fun calibrate(): Mat? {val rotationVectors = ArrayList<Mat>()val translationVectors = ArrayList<Mat>()val rms = Calib3d.calibrateCamera(objectPoints,imagePoints,imageSize,cameraMatrix,distortionCoefficients,rotationVectors,translationVectors)if (rms < 1.0) {return cameraMatrix}return null}// 获取相机矩阵fun getCameraMatrix(): Mat {return cameraMatrix}// 获取畸变系数fun getDistortionCoefficients(): Mat {return distortionCoefficients}fun setImageSize(width: Int, height: Int) {imageSize = Size(width.toDouble(), height.toDouble())}} -
通过Camera2获取到帧数据后转成灰度图Mat,创建一个 CameraCalibrator 对象,添加物理世界点和图像点
fun startCalib(){calibrator = CameraCalibrator()GlobalScope.launch(Dispatchers.IO) {var grayMat = Mat(CameraUtil.cameraH, CameraUtil.cameraW, CvType.CV_8UC1);grayMat.put(0,0,data)addPoint(grayMat)}}fun addPoint(grayImage:Mat){Log.i(TAG,"addPointstart")val corners = MatOfPoint2f()val patternSize = Size(11.0, 8.0) // 棋盘格的内角点数目val found = Calib3d.findChessboardCorners(grayImage, patternSize, corners,Calib3d.CALIB_CB_ADAPTIVE_THRESH or Calib3d.CALIB_CB_NORMALIZE_IMAGE)if (found) {Log.i(TAG,"addPointend found")// 添加图像点和物理世界点val objectPoints = MatOfPoint3f()for (i in 0 until patternSize.height.toInt()) {for (j in 0 until patternSize.width.toInt()) {objectPoints.push_back(MatOfPoint3f(Point3(j.toDouble(), i.toDouble(), 0.0)))}}calibrator?.addObjectPoint(objectPoints)calibrator?.addImagePoint(corners)}Log.i(TAG,"addPointend")stopCabin()} -
执行相机标定,并获取相机矩阵和畸变系数
fun stopCabin(){Log.i(TAG,"stopCabin")calibrator?.setImageSize(1920, 1080)val cameraMatrix = calibrator?.calibrate()val distortionCoefficients = calibrator?.getDistortionCoefficients()if (cameraMatrix != null) {// 标定成功,可以使用相机矩阵进行后续处理//查看相机的内参(相机矩阵),你可以获取 cameraMatrix 输出的 Mat 对象,并使用 OpenCV 提供的函数来解析和显示其内容//将 cameraMatrix 转换为双精度数组val cameraMatrixArray = DoubleArray(9)cameraMatrix.get(0, 0, cameraMatrixArray)Log.i(TAG,"相机内参 = "+cameraMatrixArray.contentToString())} else {// 标定失败,请检查标定图像和参数设置}} -
Calib3d.calibrateCamera() 方法用于相机标定,它接受多个参数来执行标定过程。下面是各个参数的含义:
objectPoints:一个 ArrayList 对象,存储了多个棋盘格的物理世界坐标点。每个 Mat 对象表示一个图像对应的物理世界坐标点。该参数用于指定棋盘格的内角点在物理世界中的坐标。
imagePoints:一个 ArrayList 对象,存储了多个棋盘格的图像坐标点。每个 Mat 对象表示一个图像中检测到的棋盘格的内角点坐标。该参数用于指定棋盘格的内角点在图像中的坐标。
imageSize:一个 Size 对象,指定图像的大小(宽度和高度)。该参数用于指定输入图像的尺寸。
cameraMatrix:一个 Mat 对象,用于存储输出的相机矩阵。相机矩阵包含了相机的内参,如焦距和光心坐标等信息。
distortionCoefficients:一个 Mat 对象,用于存储输出的畸变系数。畸变系数描述了相机的畸变情况,包括径向畸变和切向畸变等。
rotationVectors:一个 ArrayList 对象,用于存储输出的旋转向量。每个旋转向量表示了相机在捕获每张图像时的姿态信息。
translationVectors:一个 ArrayList 对象,用于存储输出的平移向量。每个平移向量表示了相机在捕获每张图像时的位置信息。
返回值是一个浮点数,表示标定的均方根误差(RMSE),用于评估标定结果的准确度。
请注意,为了将参数传递到 Calib3d.calibrateCamera() 方法中,你需要正确地创建和填充这些参数。特别是 objectPoints 和 imagePoints,它们应该包含正确的物理世界坐标和图像坐标。
相关文章:

Android通过OpenCV实现相机标定
在 Android 中使用 OpenCV 实现相机标定,你可以按照以下步骤进行操作: 首先,确保你已经在项目中引入了 OpenCV 库的依赖。 创建一个 CameraCalibrator 类,用于执行相机标定。 import org.opencv.calib3d.Calib3dimport org.open…...

我们可能要为ChatGPT的谢幕做好准备
ChatGPT的未来:悬念仍存 人工智能已经成为我们生活不可或缺的一部分。在众多AI应用中,OpenAI研发的ChatGPT凭借其极强的语言理解和生成能力脱颖而出,是一项划时代的变革性创新,帮助了无数企业和个人,改变了我们与技…...

深入浅出Pytorch函数——torch.nn.init.xavier_normal_
分类目录:《深入浅出Pytorch函数》总目录 相关文章: 深入浅出Pytorch函数——torch.nn.init.calculate_gain 深入浅出Pytorch函数——torch.nn.init.uniform_ 深入浅出Pytorch函数——torch.nn.init.normal_ 深入浅出Pytorch函数——torch.nn.init.c…...

Abandon_Ubuntu Declaration
鉴于以下几个原因,持续到明年考研结束,我将不再捣鼓ubuntu和任何linux系统, 原因如下: ubuntu23.04不支持wps编辑pdf这个核心功能,且开机向canonial公司发送远程遥测,暂时不会用iptables禁用,故…...
Java设计模式-抽象工厂模式
简介 设计模式是软件设计中的一种常见方法,通过定义一系列通用的解决方案,来解决常见的软件设计问题。其中,抽象工厂模式是一种非常常见的设计模式,它可以帮助我们创建一组相关的对象,而不需要指定具体的实现方式。 …...
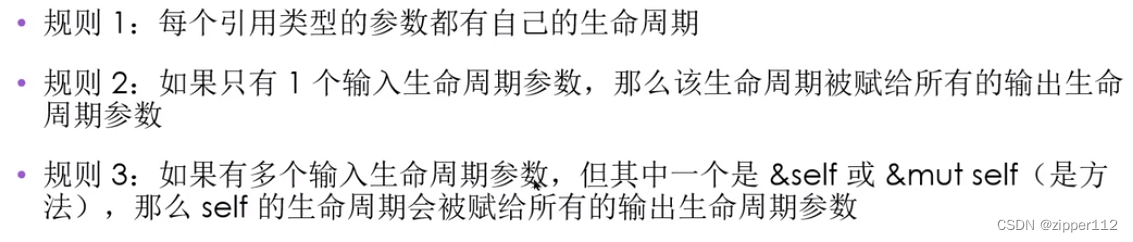
Rust语法:所有权引用生命周期
文章目录 所有权垃圾回收管理内存手动管理内存Rust的所有权所有权转移函数所有权传递 引用与借用可变与不可变引用 生命周期悬垂引用函数生命周期声明结构体的生命周期声明Rust生命周期的自行推断生命周期约束静态生命周期 所有权 垃圾回收管理内存 Python,Java这…...
办手机卡/流量卡需要问清楚啥?
网上的手机卡一搜能出现千千万,那么怎么才能避免购买到那些套路卡呢?今天就给大家分享一下,办理手机卡时需要问清楚什么? 办理流量卡需要咨询的五大问题,下面开始进入正题。 1、是否是正规号卡?正规的号…...

vim基本使用方法
VIM 1.vim介绍2.vim基本操作2.1 模式切换2.2 命令模式2.3 底行模式 1.vim介绍 vim是linux上一个有多个编辑模式的编辑器。 这里主要介绍三种模式: 命令模式(Normal mode) 执行命令的模式,主要任务就是控制光标移动、复制和删除。…...
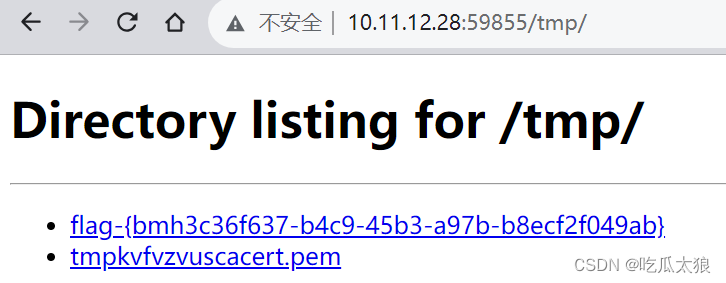
漏洞指北-VulFocus靶场专栏-入门
漏洞指北-VulFocus靶场01-入门 VulFocus靶场前置条件:入门001 命令执行漏洞step1: 输入默认index的提示step2: 入门002 目录浏览漏洞step1:进入默认页面,找到tmp目录step2 进入tmp目录获取flag文件 VulFocus靶场前置条…...

管理类联考——逻辑——真题篇——按知识分类——汇总篇——二、论证逻辑——推论——第二节——数字推理题
文章目录 第二节 数字推理题真题(2017-31)——推论——数字推理题——数量比例模型真题(2014-33)——推论——数字推理题——数量比例模型——(1)若题干既有数量,也有比例,答案一般为数量。(2)若题干只有比例没有数量,答案一般为比例。真题(2018-44)——推论——数…...
 git reflog查看引用日志)
git基础教程(24) git reflog查看引用日志
文章目录 1、`git reflog`命令说明2、`git reflog`命令显示内容3、具体的用法4、引起ref变化的操作有git reflog 命令是用来恢复本地错误操作很重要的一个命令,所以在这里对它进行一下整理。 1、git reflog命令说明 reflog翻译:Reference logs(参考日志) git reflog命令:…...
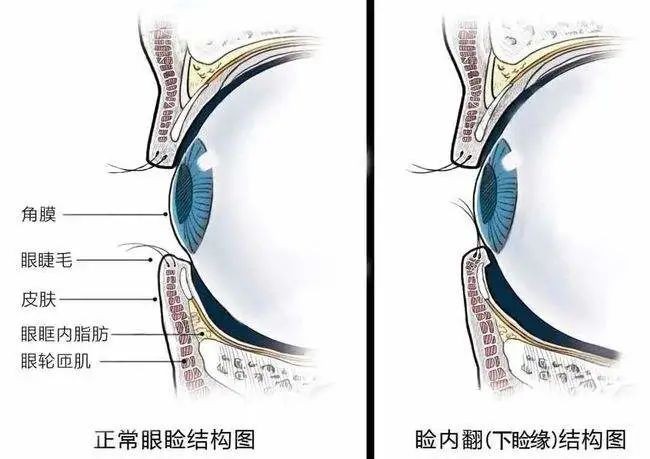
成都爱尔谭娇主任提醒孩子不停揉眼睛是因为什么
孩子总是揉眼睛, 明显眼睛不舒服, 但看着好像没什么? 可孩子不停眨眼流泪, 肯定不对…… 孩子到底怎么了? 孩子可能长了“倒睫”! 孩子出现倒睫毛就是睫毛不朝外长而向内长,是婴幼儿很容易患的一种眼病。 由于孩子的脸颊及鼻梁发…...

医疗设备管理软件哪家好?医院设备全生命周期管理要怎么做?
随着医学技术的不断进步,医疗设备变得越来越先进,越来越复杂。因此,医疗设备的管理也变得越来越重要。传统的医疗设备管理方式存在很多问题,比如设备数据难统计、报修方式难统一、巡检维保难规范等。为了解决这些问题,…...
基于PaddlePaddle实现的声纹识别系统
前言 本项目使用了EcapaTdnn、ResNetSE、ERes2Net、CAM等多种先进的声纹识别模型,不排除以后会支持更多模型,同时本项目也支持了MelSpectrogram、Spectrogram、MFCC、Fbank等多种数据预处理方法,使用了ArcFace Loss,ArcFace loss…...
使用GDB工具分析core文件的方法
引言: 在软件开发过程中,我们经常会遇到程序崩溃或异常退出的情况。这时,一个非常有用的工具就是GDB(GNU调试器),它可以帮助我们分析core文件并找出导致程序崩溃的原因。本文将介绍如何使用GDB工具来分析c…...

Maven - 统一构建规范:Maven 插件管理最佳实践
文章目录 Available Plugins开源项目中的使用插件介绍maven-jar-pluginmaven-assembly-pluginmaven-shade-pluginShade 插件 - 标签artifactSetrelocationsfilters 完整配置 Available Plugins https://maven.apache.org/plugins/index.html Maven 是一个开源的软件构建工具&…...

对接海康明眸门禁设备-删除人员信息
对接海康明眸门禁设备-删除人员信息 文中登录 退出登录 长连接和海康hCNetSDK等接口 见文章 初始SDK和登录 /*** 删除人脸 IotCommDataResult 自定义类 收集结果*/Overridepublic List<IotCommDataResult> deleteFace(IotCameraParam camera, Collection<Long> us…...
LEADTOOLS Imaging SDK Crack
LEADTOOLS Imaging SDK Crack 高级开发人员工具包包括ActiveX和WPF/XAML控件。 LEADTOOLS Imaging SDK为文件格式导入/导出、图像压缩、图像显示和效果、颜色转换、图像处理、TWAIN扫描、图像通用对话框、数据库集成、打印和互联网提供了基本和高级的彩色图像功能。 LEADTOOLS …...

2023并发之八股文——面试题
基础知识 并发编程的优缺点为什么要使用并发编程(并发编程的优点) 充分利用多核CPU的计算能力:通过并发编程的形式可以将多核CPU 的计算能力发挥到极致,性能得到提升方便进行业务拆分,提升系统并发能力和性能&#x…...

操作记录日志保存设计实现
定义一个切面类 @Aspect @Slf4j @Component @RequiredArgsConstructor public class OperateLogAopConfig {private final ISysOperateLogService sysOperateLogService;@Around("@annotation(operateLog)")public Object operateLog(ProceedingJoinPoint point, Op…...

别再手动点选了!用C#写个SolidWorks插件,一键智能识别并拉伸草图里的特定轮廓
用C#开发SolidWorks智能插件:一键识别并拉伸特定草图轮廓的工程实践 在机械设计领域,SolidWorks作为主流三维CAD软件,其草图绘制与特征创建是产品开发的基础环节。工程师们经常遇到这样的场景:复杂草图中包含多个相交轮廓…...

不止是画框!深入理解Cadence Allegro中Route Keepout与Route Keepin的实战区别
不止是画框!深入理解Cadence Allegro中Route Keepout与Route Keepin的实战区别 在PCB设计领域,约束管理系统的精准运用往往决定着设计成败。对于使用Cadence Allegro的工程师而言,Route Keepout(禁止布线区)和Route Ke…...

PICAXE单片机驱动DS18B20温度传感器:从硬件连接到数据处理
1. 项目概述:用PICAXE玩转DS18B20数字温度传感器如果你手头有一块PICAXE单片机,想快速实现一个温度监测项目,那么DS18B20这颗数字温度传感器绝对是你的绝佳拍档。它只需要一根数据线就能和MCU通信,抗干扰能力强,还能通…...

开源机械爪智能增强:计算机视觉与运动规划赋予抓取超能力
1. 项目概述:当“机械爪”遇上“超能力”如果你玩过抓娃娃机,或者关注过工业自动化,对机械爪(Claw)这个概念一定不陌生。它的核心任务简单直接:识别、定位、抓取。但现实往往骨感——面对形状不规则、材质光…...

GPU加速网络爬虫:OpenCL异构计算在数据采集中的实践
1. 项目概述:一个面向硬件加速的开源抓取工具包最近在折腾一些数据采集和自动化任务时,我常常遇到一个瓶颈:当需要处理海量网页、进行高频次请求或者解析复杂的动态内容时,传统的基于CPU的抓取框架(比如Scrapy、Reques…...

嵌入式产品如何通过RTOS选型抢占市场先机
1. 项目概述:为什么“上市时机”是嵌入式产品的生死线在嵌入式系统开发这个行当里摸爬滚打了十几年,我见过太多团队把“功能实现”和“性能达标”作为项目的终极目标,却在一个更根本的问题上栽了跟头:上市时机。你可能觉得&#x…...

Cortex-R52内存管理与实时性优化技术解析
1. Cortex-R52内存管理架构解析Cortex-R52作为Armv8-R架构的旗舰级实时处理器,其内存管理系统针对高可靠性场景进行了深度优化。与传统MMU不同,R52采用了增强型MPU(Memory Protection Unit)设计,通过16-24个可编程保护…...

如何实现微信聊天记录永久保存:WeChatMsg完整备份终极指南
如何实现微信聊天记录永久保存:WeChatMsg完整备份终极指南 【免费下载链接】WeChatMsg 提取微信聊天记录,将其导出成HTML、Word、CSV文档永久保存,对聊天记录进行分析生成年度聊天报告 项目地址: https://gitcode.com/GitHub_Trending/we/W…...

网站国产化改造怎么做?深度解读国产化替代路径与CMS推荐
在近年来科技领域的舆论场中,“国产化”无疑是出现频率最高的关键词之一。从芯片到操作系统,从数据库到办公软件,再到企业对外展示的门户——网站,国产化替代已从“可选项”变成了很多行业的“必答题”。但国产化仅仅是“换个牌子…...

ncmdumpGUI终极使用教程:轻松解密网易云音乐NCM文件
ncmdumpGUI终极使用教程:轻松解密网易云音乐NCM文件 【免费下载链接】ncmdumpGUI C#版本网易云音乐ncm文件格式转换,Windows图形界面版本 项目地址: https://gitcode.com/gh_mirrors/nc/ncmdumpGUI 还在为网易云音乐下载的NCM格式文件无法在普通…...