点云平面拟合和球面拟合
一、介绍
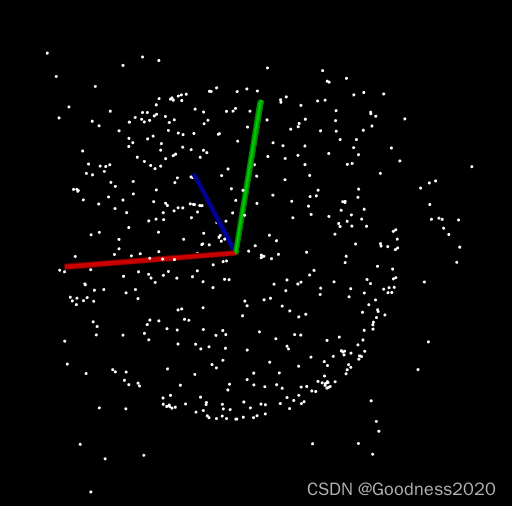
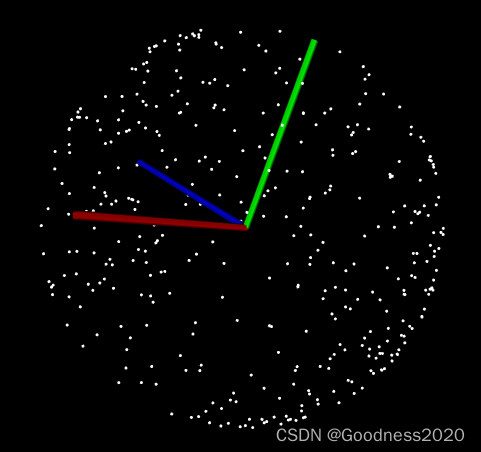
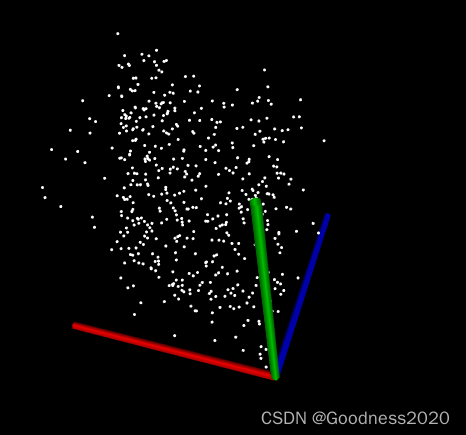
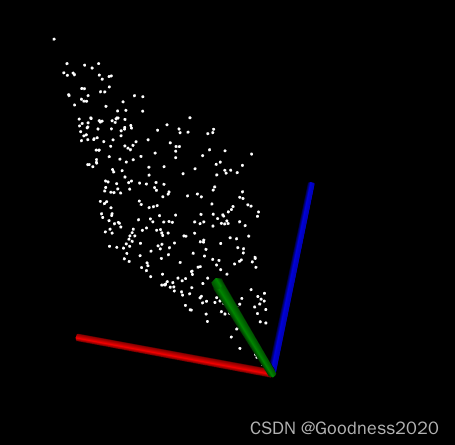
In this tutorial we learn how to use a RandomSampleConsensus with a plane model to obtain the cloud fitting to this model.
二、代码
#include <iostream>
#include <thread>
#include <pcl/point_types.h>
#include <pcl/common/io.h>
#include <pcl/point_cloud.h>
#include <pcl/sample_consensus/ransac.h>
#include <pcl/sample_consensus/sac_model_plane.h>
#include <pcl/sample_consensus/sac_model_sphere.h>
#include <pcl/visualization/pcl_visualizer.h>using namespace std::chrono_literals;pcl::visualization::PCLVisualizer::Ptr simpleVis(pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud)
{pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));viewer->setBackgroundColor(0, 0, 0);viewer->addPointCloud<pcl::PointXYZ>(cloud, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addCoordinateSystem (1.0, "global");viewer->initCameraParameters();return (viewer);
}void ranFit()
{bool is_plane = true;bool is_show_final = false;pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZ>::Ptr final(new pcl::PointCloud<pcl::PointXYZ>);cloud->width = 500;cloud->height = 1;cloud->is_dense = false;cloud->points.resize(cloud->width * cloud->height);for (int i = 0; i < cloud->size(); ++i){if (is_plane==false){// x*x+y*y+z*z=1(*cloud)[i].x = 2.0 * rand() / (RAND_MAX + 1.0) - 1.0;(*cloud)[i].y = 2.0 * rand() / (RAND_MAX + 1.0) - 1.0;if ((*cloud)[i].x * (*cloud)[i].x + ((*cloud)[i].y * (*cloud)[i].y) > 1)(*cloud)[i].z = 2.0 * rand() / (RAND_MAX + 1.0) - 1.0;else if (i % 2 == 0)(*cloud)[i].z = sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x) - ((*cloud)[i].y * (*cloud)[i].y));else(*cloud)[i].z = -sqrt(1 - ((*cloud)[i].x * (*cloud)[i].x) - ((*cloud)[i].y * (*cloud)[i].y));}else{// 0.5x+0.5y-z=0(*cloud)[i].x = rand() / (RAND_MAX + 1.0);(*cloud)[i].y = rand() / (RAND_MAX + 1.0);if (i % 3 == 0)(*cloud)[i].z = rand() / (RAND_MAX + 1.0);else(*cloud)[i].z = 0.5 * (*cloud)[i].x + 0.5 * (*cloud)[i].y;}}std::vector<int> inliers;std::vector<int> outliers;pcl::SampleConsensusModelSphere<pcl::PointXYZ>::Ptrmodel_s(new pcl::SampleConsensusModelSphere<pcl::PointXYZ>(cloud));pcl::SampleConsensusModelPlane<pcl::PointXYZ>::Ptrmodel_p(new pcl::SampleConsensusModelPlane<pcl::PointXYZ>(cloud));Eigen::VectorXf coef;if (is_plane){pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_p);ransac.setDistanceThreshold(.01);ransac.computeModel();ransac.getInliers(inliers);ransac.getModelCoefficients(coef);}else{pcl::RandomSampleConsensus<pcl::PointXYZ> ransac(model_s);ransac.setDistanceThreshold(.01);ransac.computeModel();ransac.getInliers(inliers);ransac.getModelCoefficients(coef);}std::cout << coef << std::endl;pcl::copyPointCloud(*cloud, inliers, *final);pcl::visualization::PCLVisualizer::Ptr viewer;if (is_show_final)viewer = simpleVis(final);elseviewer = simpleVis(cloud);while (!viewer->wasStopped()){viewer->spinOnce(100);std::this_thread::sleep_for(100ms);}
}int main()
{ranFit();return (0);
}
三、参考
How to use Random Sample Consensus model — Point Cloud Library 0.0 documentation
相关文章:
点云平面拟合和球面拟合
一、介绍 In this tutorial we learn how to use a RandomSampleConsensus with a plane model to obtain the cloud fitting to this model. 二、代码 #include <iostream> #include <thread> #include <pcl/point_types.h> #include <pcl/common/io.…...
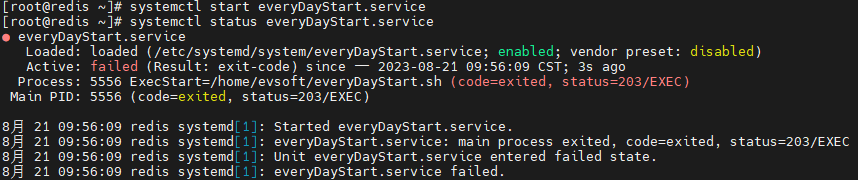
部署问题集合(十九)linux设置Tomcat、Docker,以及使用脚本开机自启(亲测)
前言 因为不想每次启动虚拟机都要手动启动一遍这些东西,所以想要设置成开机自启的状态 设置Tomcat开机自启 创建service文件 vi /etc/systemd/system/tomcat.service添加如下内容,注意修改启动脚本和关闭脚本的地址 [Unit] DescriptionTomcat9068 A…...
视觉SLAM:一直在入门,如何能精通,CV领域的绝境长城,
目录 前言 福利:文末有chat-gpt纯分享,无魔法,无限制 1 什么是SLAM? 2 为什么用SLAM? 3 视觉SLAM怎么实现? 4 前端视觉里程计 5 后端优化 6 回环检测 7 地图构建 8 结语 前言 上周的组会上&…...

【报错】yarn --version Unrecognized option: --version Error...
文章目录 问题分析解决问题 在使用 npm install -g yarn 全局安装 yarn 后,查看yarn 的版本号,报错如下 PS D:\global-data-display> yarn --version Unrecognized option: --version Error: Could...
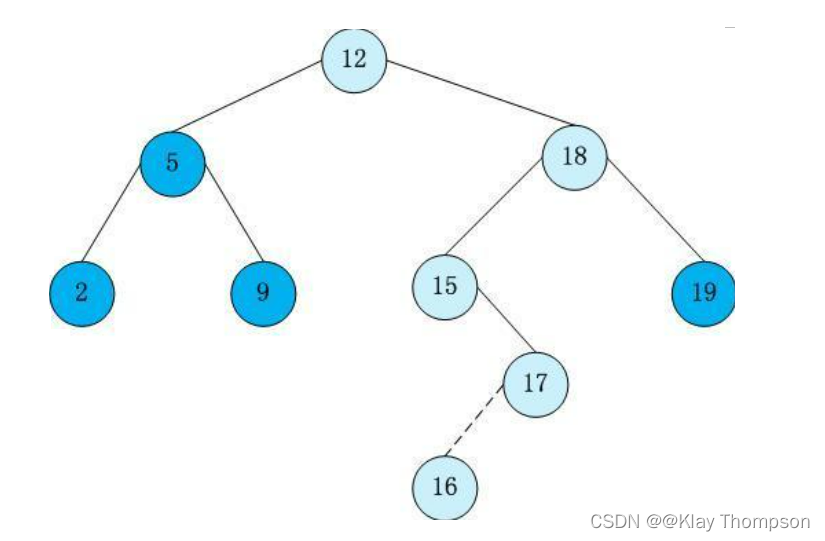
二叉搜索树的(查找、插入、删除)
一、二叉搜索树的概念 二叉搜索树又称二叉排序树,它或者是一棵空树,或者是具有以下性质的二叉树: 1、若它的左子树不为空,则左子树上所有节点的值都小于根节点的值; 2、若它的右子树不为空,则右子树上所有节点的值都…...

电力虚拟仿真 | 高压电气试验VR教学系统
在科技进步的推动下,我们的教育方式也在发生着翻天覆地的变化。其中,虚拟现实(VR)技术的出现,为我们提供了一种全新的、富有沉浸感的学习和培训方式。特别是在电力行业领域,例如,电力系统的维护…...

innovus如何设置size only
我正在「拾陆楼」和朋友们讨论有趣的话题,你⼀起来吧? 拾陆楼知识星球入口 给instance设置size only属性命令如下: dbset [dbGet top.inst.name aa/bb -p] .dontTouch sizeOk 给一个module设置size only需要foreach循环一下: foreach inst [dbGet top.…...

Java之继承详解二
3.7 方法重写 3.7.1 概念 方法重写 :子类中出现与父类一模一样的方法时(返回值类型,方法名和参数列表都相同),会出现覆盖效果,也称为重写或者复写。声明不变,重新实现。 3.7.2 使用场景与案例…...
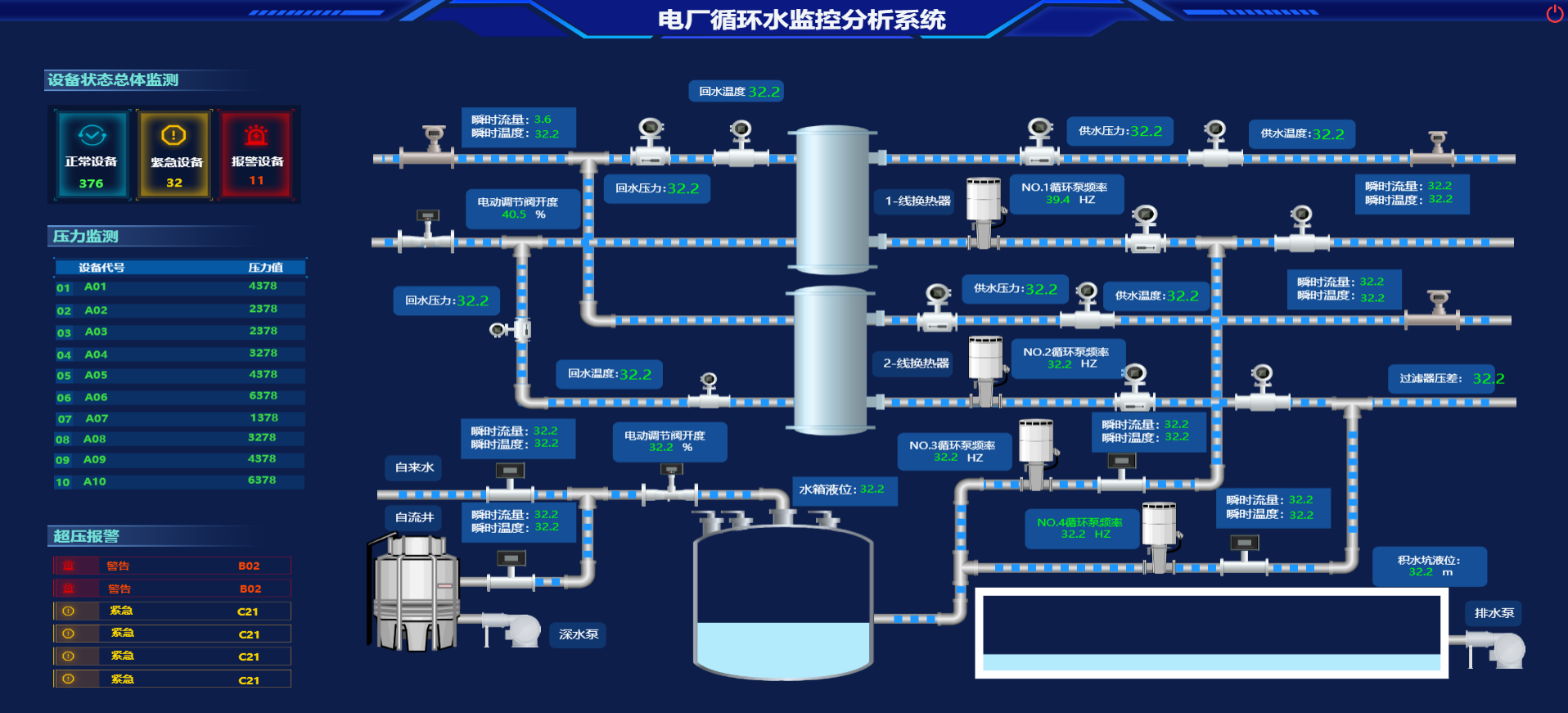
国内常见的几款可视化Web组态软件
组态软件是一种用于控制和监控各种设备的软件,也是指在自动控制系统监控层一级的软件平台和开发环境。这类软件实际上也是一种通过灵活的组态方式,为用户提供快速构建工业自动控制系统监控功能的、通用层次的软件工具。通常用于工业控制,自动…...
通过 git上传到 gitee 仓库
介绍 Git是目前世界上最先进的分布式版本控制系统,有这么几个特点: 分布式 :是用来保存工程源代码历史状态的命令行工具。保存点 :保存点可以追溯源码中的文件,并能得到某个时间点上的整个工程项目额状态;…...

设置Windows主机的浏览器为wls2的默认浏览器
1. 准备工作 wsl是可以使用Windows主机上安装的exe程序,出于安全考虑,默认情况下改功能是无法使用。要使用的话,终端需要以管理员权限启动。 我这里以Windows Terminal为例,介绍如何默认使用管理员权限打开终端,具体…...
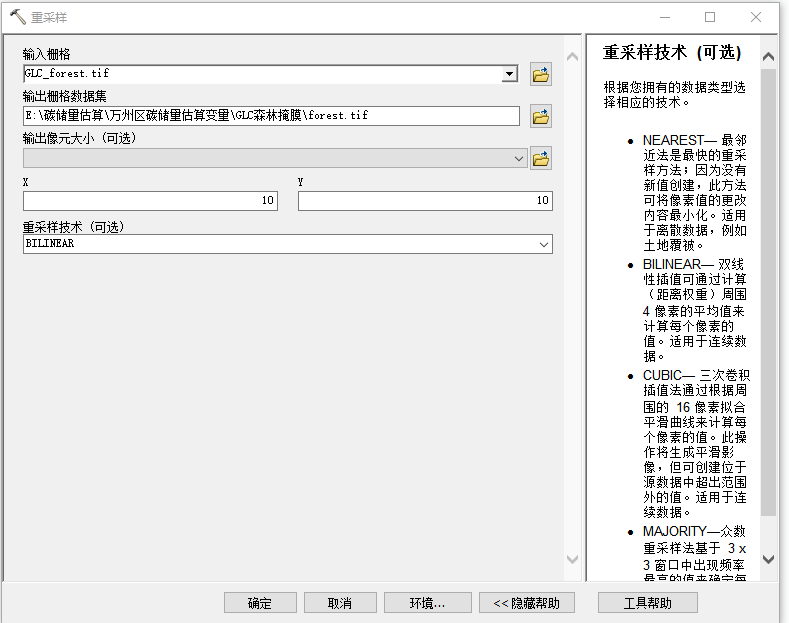
森林生物量(蓄积量)估算全流程
python森林生物量(蓄积量)估算全流程 一.哨兵2号获取/去云处理/提取参数1.1 影像处理与下载1.2 导入2A级产品1.3导入我们在第1步生成的云掩膜文件1.4.SNAP掩膜操作1.5采用gdal计算各类植被指数1.6 纹理特征参数提取 二.哨兵1号获取/处理/提取数据2.1 纹理…...
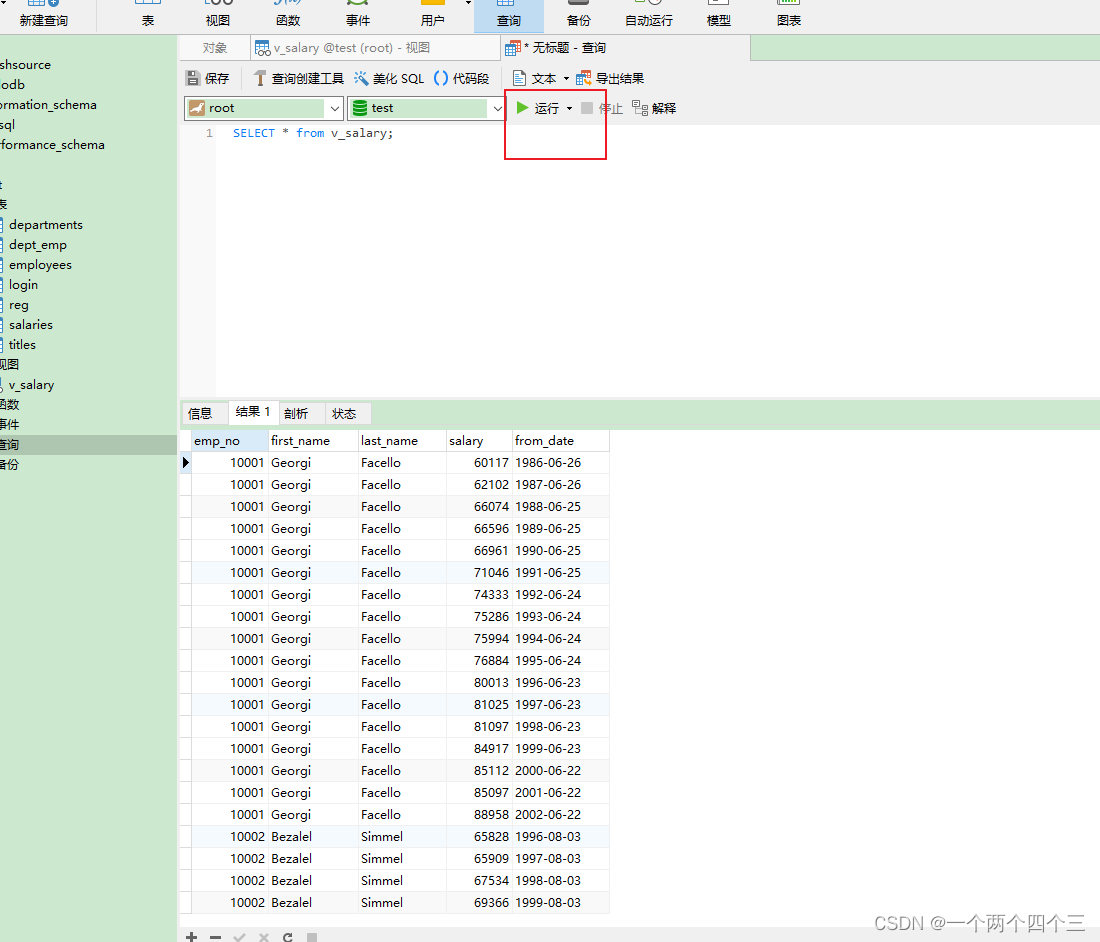
MySQL数据库概述
MySQL数据库概述 1 SQL SQL语句大小写不敏感。 SQL语句末尾应该使用分号结束。 1.1 SQL语句及相关操作示例 DDL:数据定义语言,负责数据库定义、数据库对象定义,由CREATE、ALTER与DROP三个语法所组成DML:数据操作语言ÿ…...

2023年国赛数学建模思路 - 案例:退火算法
文章目录 1 退火算法原理1.1 物理背景1.2 背后的数学模型 2 退火算法实现2.1 算法流程2.2算法实现 建模资料 ## 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 退火算法原理 1.1 物理背景 在热力学上&a…...

怎么借助ChatGPT处理数据结构的问题
目录 使用ChatGPT进行数据格式化转换 代码示例 ChatGPT格式化数据提示语 代码示例 批量格式化数据提示语 代码示例 ChatGPT生成的格式化批处理代码 使用ChatGPT合并不同数据源的数据 合并数据提示语 自动合并数据提示语 ChatGPT生成的自动合并代码 结论 数据合并是…...
Docker容器无法启动 Cannot find /usr/local/tomcat/bin/setclasspath.sh
报错信息如下 解决办法 权限不够 加上--privileged 获取最大权限 docker run --privileged --name lenglianerqi -p 9266:8080 -v /opt/docker/lenglianerqi/webapps:/usr/local/tomcat/webapps/ -v /opt/docker/lenglianerqi/webapps/userfile:/usr/local/tomcat/webapps/u…...

Pytorch-day08-模型进阶训练技巧-checkpoint
PyTorch 模型进阶训练技巧 自定义损失函数动态调整学习率 典型案例:loss上下震荡 [外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-BndMyRX0-1692613806232)(attachment:image-2.png)] 1、自定义损失函数 1、PyTorch已经提供了很多常用…...
:样式(Style)和符号(Symbol))
【ArcGIS Pro二次开发】(61):样式(Style)和符号(Symbol)
在 ArcGIS Pro SDK 中,地图要素符号(Symbol)和符号样式(Style)是2个很重要的概念。 【Symbol】是用于表示地图上不同类型的要素(如点、线、面)的图形化表示。 在地图中,各种要素都…...

深入理解 HTTP/2:提升 Web 性能的秘密
HTTP/2 是一项重大的网络协议升级,旨在提升 Web 页面加载速度和性能。在这篇博客中,我们将深入探讨 HTTP/2 的核心概念以及如何使用它来加速网站。 什么是 HTTP/2? HTTP/2 是 HTTP 协议的下一个版本,旨在解决 HTTP/1.1 中的性能…...
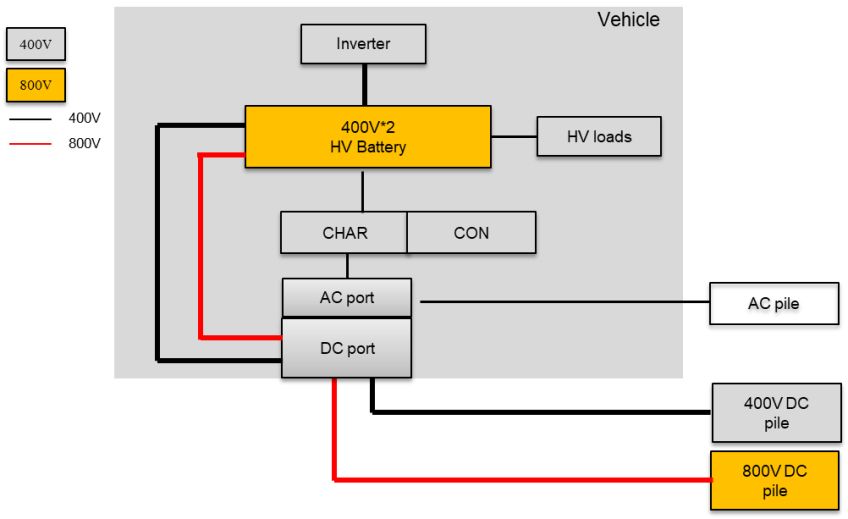
800V高压电驱动系统架构分析
需要电驱竞品样件请联:shbinzer (拆车邦) 过去一年是新能源汽车市场爆发的一年,据中汽协数据,2021年新能源汽车销售352万辆,同比大幅增长157.5%。新能源汽车技术发展迅速,畅销车辆在动力性能…...

ChatGPT开发者实战指南:从API集成到应用部署的完整资源导航
1. 项目概述:一份面向开发者的ChatGPT资源导航 如果你是一名开发者、产品经理,或者任何对AI应用构建感兴趣的技术爱好者,最近几个月肯定被ChatGPT和GPT-3相关的新闻、工具和项目刷屏了。信息爆炸带来的一个直接问题是:好东西太多…...

智能重复文件清理:DupeGuru终极配置与实战指南
智能重复文件清理:DupeGuru终极配置与实战指南 【免费下载链接】dupeguru Find duplicate files 项目地址: https://gitcode.com/gh_mirrors/du/dupeguru 在数字时代,重复文件如同无形的存储黑洞,悄无声息地吞噬着宝贵的磁盘空间。无论…...

Python调用MATLAB引擎避坑指南:从安装路径选择到`setup.py` install命令的完整实战
Python调用MATLAB引擎避坑指南:从安装路径选择到setup.py install命令的完整实战 在科学计算和工程仿真领域,MATLAB和Python各有优势。许多开发者希望将两者结合使用,但安装MATLAB引擎到Python环境时常常遇到各种"玄学"问题。本文将…...

如何彻底解决JavaScript浮点数精度问题:decimal.js完整指南
如何彻底解决JavaScript浮点数精度问题:decimal.js完整指南 【免费下载链接】decimal.js An arbitrary-precision Decimal type for JavaScript 项目地址: https://gitcode.com/gh_mirrors/de/decimal.js 你是否曾经遇到过JavaScript中0.1 0.2 ≠ 0.3的尴尬…...

为vscode中的claude code插件配置taotoken后端以解决封号困扰
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 为vscode中的claude code插件配置taotoken后端以解决封号困扰 许多开发者在 Visual Studio Code 中使用 Claude Code 插件时&#…...

如何准备打动评审的物联网与硬件创业技术演讲
1. 从听众到讲者:在EE Live分享你的硬件与物联网洞见如果你是一名电子设计工程师、嵌入式开发者,或者正在硬件创业的浪潮中摸索,那么EE Live这个名字对你来说应该不陌生。这个由EE Times主办的年度盛会,前身是DESIGN West…...
)
Linux内核开发避坑:你的kmalloc申请到底浪费了多少内存?(附slab/slub实战分析)
Linux内核内存优化实战:kmalloc申请背后的隐藏成本与调优策略 在性能敏感的内核模块开发中,每个字节的内存使用都可能成为系统瓶颈的导火索。我曾亲眼见证过一个网络驱动模块因为不当的kmalloc调用模式,导致系统在高压下额外消耗了12%的内存—…...

基于多智能体架构的AI股票分析系统PRISM-INSIGHT部署与实战
1. 项目概述:一个由13个AI智能体驱动的股票分析与交易系统如果你对AI如何应用于金融投资感兴趣,或者正在寻找一个能自动分析市场、生成专业报告甚至执行交易的开源工具,那么PRISM-INSIGHT值得你花时间深入了解。这不是一个简单的数据可视化工…...

终极图像超分辨率神器:waifu2x-caffe完整使用指南
终极图像超分辨率神器:waifu2x-caffe完整使用指南 【免费下载链接】waifu2x-caffe waifu2xのCaffe版 项目地址: https://gitcode.com/gh_mirrors/wa/waifu2x-caffe 你是否曾为低分辨率图片的模糊细节而烦恼?想要将心爱的动漫壁纸放大到4K分辨率&a…...

STM32F103C6/RC + HC-SR04超声波测距:Proteus 8.9仿真避坑与LCD1602显示实战
STM32F103C6/RC HC-SR04超声波测距:Proteus 8.9仿真避坑与LCD1602显示实战 在嵌入式开发的学习过程中,仿真工具为我们提供了极大的便利,尤其是对于资源有限或硬件条件不足的开发者来说,Proteus仿真软件无疑是一把利器。然而&…...