机器人TF坐标系变换与一些可视化工具的应用
TF坐标在ROS中是一个非常重要的概念,因为机器人在做日常操作任务的时候,对于其所在位置和朝向是需要时刻知道的,而机器人是由很多节点组成的协同任务,对于每个部件,我们需要知道它的位姿(位置和朝向),这使得坐标系就成为了一个很重要的问题。
TF的功能就是能够换算出该点在其他坐标系下的坐标。比如,以机器人为例,定义两个坐标系,一个坐标系以机器人移动平台的中心为原点,称为base_link参考系,另一个坐标系以激光雷达的中心为原点,称为base_laser参考系,当然这个命名是需要唯一。利用TF坐标转换,将base_laser参考系与base_link参考系重合,这样就可以准确得知机器人自身位置,便于继续进行下一步的操作。
1、术语概述
那么在介绍坐标系的时候,会经常看到位置、朝向,位姿等术语,先介绍下在三维世界中的几个术语:
位置:是一个三维的向量(x,y,z),用于表示相对于原点沿着各个轴的方向分别移动了多远。
朝向:也是一个三维向量(roll,pitch,yaw),用于表示分别绕各个轴转动了多少。
位姿:将位置和朝向放在一起,一对(位置,朝向)表示一个位姿。这种具有六维(三维位移,三维旋转)的位姿成为6D位姿。
给定两者之间的位姿,我们可以变换两个坐标系下的数据,这个变换通常是一些矩阵乘法。有的位姿是动态的,有的位置是固定的,比如说,固定在机器人身上的激光雷达,就是相对固定的;而机械手的位姿就是不断变化的,因为需要移动,旋转等和做一些抓取动作。
为了管理这些坐标系和变换,就设计了这个tf(Transform的缩写)包来实现,使用的是分布式的方式,用ROS话题来共享变换的数据。任何节点可以发布某些变换的当前信息,并且任何节点都可以订阅变换的数据,从不同的发布源得到机器人各部件之间的所有变换关系。
2、tf坐标系
对于一个强大系统来说,tf会比较的复杂,出错的可能性较大,所以就出现很多关于tf相关的检查和调试工具,帮助你理解正在发生的实情,我们接下来看下有哪些可视化的工具可供使用。
2.1、view_frames
我们先启动海龟示例,对于前面安装过的可以忽略,也可以使用 sudo apt install ros-melodic-turtle-tf 进行安装,对于ros的安装,推荐大家可以看下前面介绍的一篇文章:Ubuntu18.04版本安装ROS及出现错误的处理方法
启动海龟
roslaunch turtle_tf turtle_tf_demo.launch启动键盘操作
rosrun turtlesim turtle_teleop_key然后再开一个终端运行命令:rosrun tf view_frames
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
Listening to /tf for 5.0 seconds
Done Listening
dot - graphviz version 2.40.1 (20161225.0304)Detected dot version 2.40
frames.pdf generated
这里生成了一个坐标系的pdf文件frames.pdf,在后面看到的frame也都表示为坐标系的意思。
2.2、rqt_tf_tree
对于上面这个view_frames命令,运行后保存的是当前坐标系,不过这样的保存是离线的,不能实时反映变化的坐标关系。
我们换一个命令:rqt_tf_tree,可以显示tf坐标系的树结构
rosrun rqt_tf_tree rqt_tf_tree运行上面命令将会弹出可视化界面,如下图:
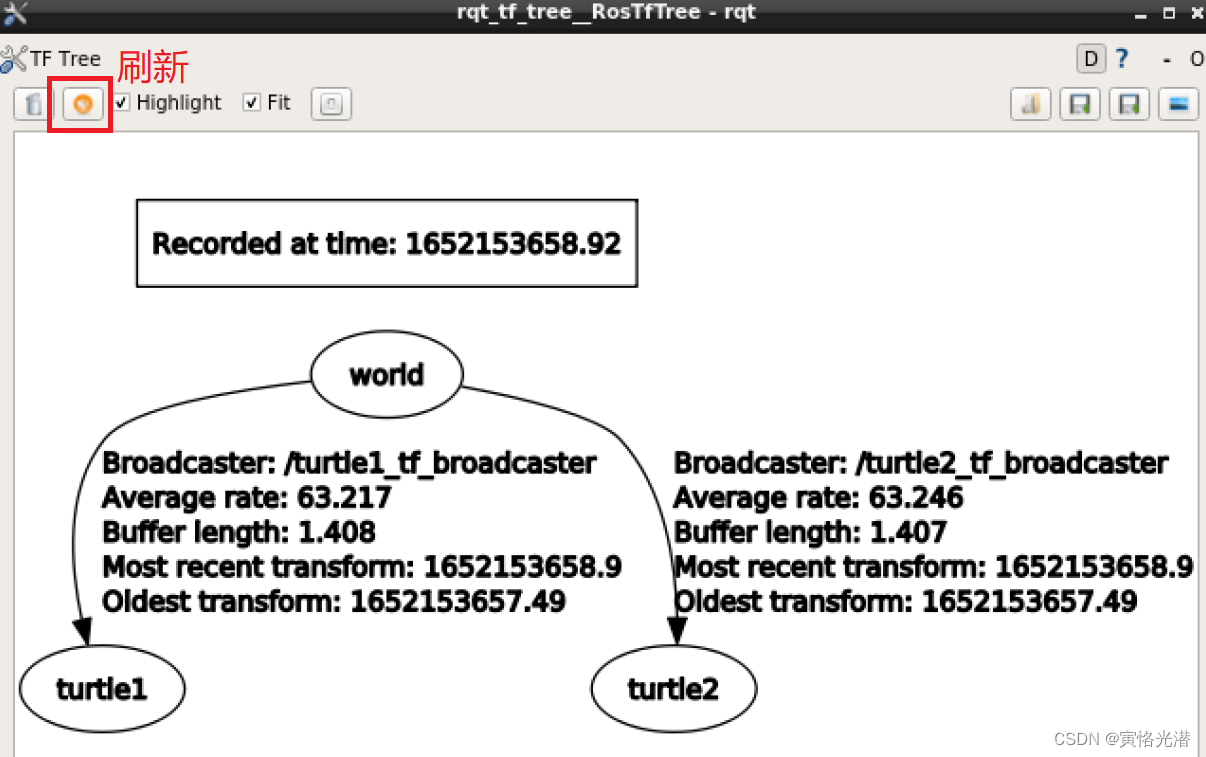
可以看到,显示了录制时间,两个海龟对应的广播(发布)节点,平均速率、缓冲大小,最近和最旧的转换时间,还可以高亮显示,鼠标放在节点上面,相关节点将显示不同颜色。
我们可以操作海龟,然后点击左上角的刷新,就会看到速率等都发生了变化,这样看起来就比较直观。如下图:

TF建立的树状结构的坐标系,在整个坐标系是没有闭环的,也就是说每个坐标系,只能有一个父坐标系,但可以有多个子坐标系。
2.3、tf_echo
命令格式:rosrun tf tf_echo <source_frame> <target_frame>
显示的信息是从source_frame到target_frame的旋转平移变换。
查看两只海龟参考系之间的关系
rosrun tf tf_echo turtle1 turtle2At time 1652155224.053
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.893, 0.450]
in RPY (radian) [0.000, -0.000, 2.208]
in RPY (degree) [0.000, -0.000, 126.509]
At time 1652155225.061
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.893, 0.450]
in RPY (radian) [0.000, -0.000, 2.208]
in RPY (degree) [0.000, -0.000, 126.509]
At time 1652155226.053
- Translation: [0.000, 0.000, 0.000]
- Rotation: in Quaternion [0.000, 0.000, 0.893, 0.450]
in RPY (radian) [0.000, -0.000, 2.208]
in RPY (degree) [0.000, -0.000, 126.509]
2.4、static_transform_publisher
两个坐标系之间的静态坐标变换,这两个坐标系不发生相对位置变化。比如说,无人车上的激光雷达与IMU惯性测量模块,这两者基本是固定的,所以可以使用static_transform_publisher来发布这两者的坐标变换。
命令格式如下:
第一种命令格式:
static_transform_publisher x y z yaw pitch roll frame_id child_frame_id period_in_ms第二种命令格式:
static_transform_publisher x y z qx qy qz qw frame_id child_frame_id period_in_ms上面的两种格式,需要设置坐标的偏移和旋转参数
偏移参数:都使用相对于x y z三轴的坐标位移。
旋转参数:其中第一种命令格式使用以弧度为单位的 yaw pitch roll 三个角度(yaw是围绕x轴旋转的偏航角,pitch是围绕y轴旋转的俯仰角,roll是围绕z轴旋转的翻滚角)
第二种命令格式使用四元数表达旋转角度。
period_in_ms发布频率以毫秒为单位,一般100ms也就是0.1秒比较合适。
在launch中使用方法示例如下:
<launch><node pkg="tf" type="static_transform_publisher" name="link1_broadcaster" args="1 0 0 0 0 0 1 link1_parent link1 100" />
</launch>2.5、roswtf
roswtf是一个插件,分析你当前的tf配置并试图找出常见问题。
比如输入命令,本人当前状态显示如下信息,有错误等情况都会高亮显示:
the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
No package or stack in the current directory
================================================================================
Static checks summary:Found 1 error(s).
ERROR ROS Dep database not updated: Please update rosdep database with 'rosdep update'.
================================================================================
Beginning tests of your ROS graph. These may take a while...
analyzing graph...
... done analyzing graph
running graph rules...
connection to [/tf_echo_1652154589994246734] timed out
... done running graph rulesOnline checks summary:
Found 1 warning(s).
Warnings are things that may be just fine, but are sometimes at faultWARNING The following node subscriptions are unconnected:
* /tf_echo_1652154589994246734:
* /tf_static
* /turtle_pointer:
* /tf_static
Found 2 error(s).ERROR Could not contact the following nodes:
* /tf_echo_1652154589994246734ERROR Errors connecting to the following services:
* service [/tf_echo_1652154589994246734/set_logger_level] appears to be malfunctioning: Unable to communicate with service [/tf_echo_1652154589994246734/set_logger_level], address [rosrpc://jetson-desktop:54551]
* service [/tf_echo_1652154589994246734/get_loggers] appears to be malfunctioning: Unable to communicate with service [/tf_echo_1652154589994246734/get_loggers], address [rosrpc://jetson-desktop:54551]
3、tab键
tab键,能够将代码补全或显示有关输入命令的未完成命令,双击tab键可以提高效率和确保输入的命令是无误的。
比如输入:rosrun rqt_ 然后双击tab键,将自动出现关于rqt开头的各种节点:
rqt_action rqt_logger_level rqt_robot_monitor
rqt_bag rqt_moveit rqt_robot_steering
rqt_bag_plugins rqt_msg rqt_runtime_monitor
rqt_console rqt_nav_view rqt_rviz
rqt_dep rqt_plot rqt_service_caller
rqt_graph rqt_pose_view rqt_shell
rqt_gui rqt_publisher rqt_srv
rqt_gui_cpp rqt_py_common rqt_tf_tree
rqt_gui_py rqt_py_console rqt_top
rqt_image_view rqt_reconfigure rqt_topic
rqt_launch rqt_robot_dashboard rqt_web
如果内容显示特别多,还会提示,比如我只输入:rosrun然后双击tab键
Display all 229 possibilities? (y or n)
可以选择是否继续显示。
如果输入的命令接下来是确定性匹配,这个时候双击tab键将自动补全剩余的。
比如输入:rosrun rqt_gu
双击tab键将会自动补全成rosrun rqt_gui,我们再次双击tab键,将列出rqt_gui开头的所有匹配节点:
rqt_gui rqt_gui_cpp rqt_gui_py
4、可视化工具
4.1、rqt_graph
rqt_graph可以将计算图可视化,输入命令:rosrun rqt_graph rqt_graph
如果没有启动节点管理器而直接运行这条命令则会报错:
Could not find ROS master,Either start a 'roscore' or abort loading the plugin.
 所以我们在此之前,先启动节点管理器,也是以海龟为示例,然后运行上面那条命令,如下图:
所以我们在此之前,先启动节点管理器,也是以海龟为示例,然后运行上面那条命令,如下图:
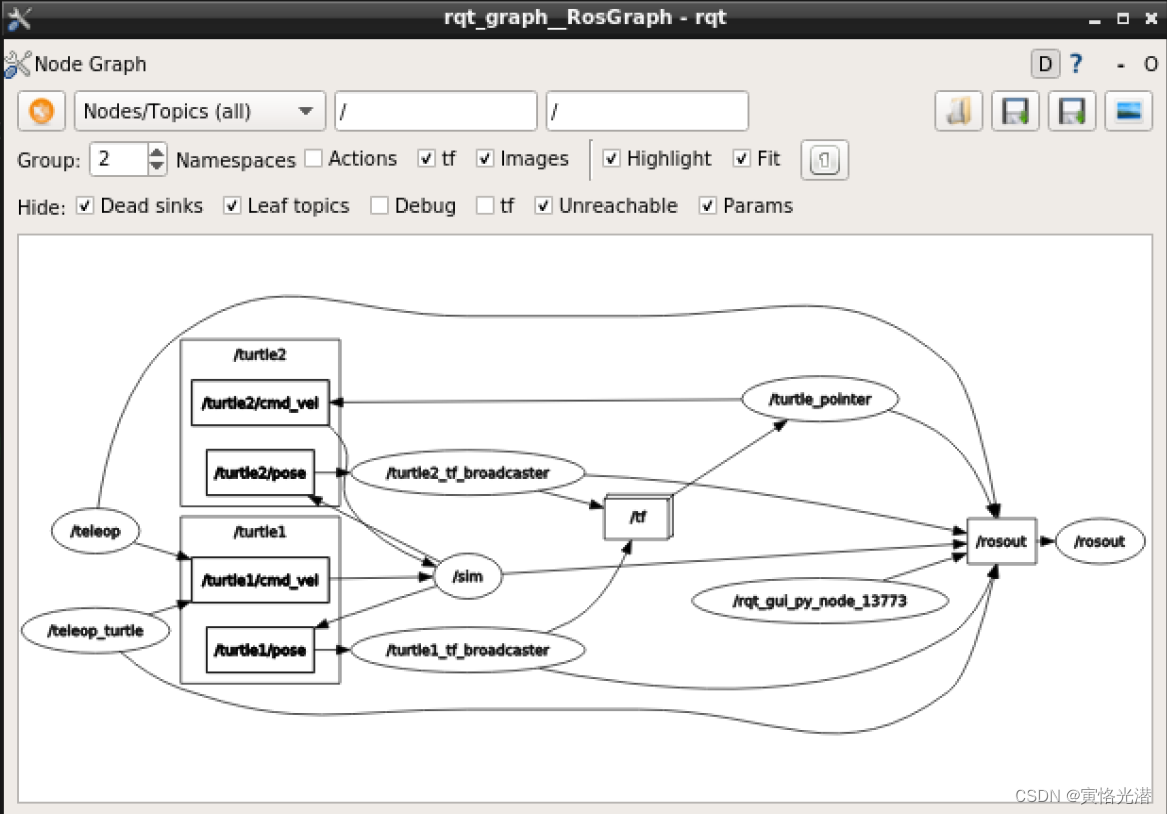
可以直观的看到两个海龟节点,里面有pose位姿,键盘操作等话题,然后位姿通过各自的广播来发布信息,中间有一个就是我们这节重点讲解的tf坐标系的话题topic:/tf(具备订阅和发布功能)来变换坐标,最后通过节点/turtle_pointer到/rosout输出。
对于图中有哪些节点,我们也可以通过命令来获取:rosnode list
/rosout
/sim
/teleop
/teleop_turtle
/turtle1_tf_broadcaster
/turtle2_tf_broadcaster
/turtle_pointer
对于节点可以看做是网站中的各自端口对应的应用,所以我们也可以像ping网络一样的来查看:
rosnode ping /rosout
rosnode: node is [/rosout]
pinging /rosout with a timeout of 3.0s
xmlrpc reply from http://jetson-desktop:46881/ time=1.574039ms
xmlrpc reply from http://jetson-desktop:46881/ time=1.164913ms
...
rosnode ping /sim
rosnode: node is [/sim]
pinging /sim with a timeout of 3.0s
xmlrpc reply from http://jetson-desktop:36081/ time=1.548052ms
xmlrpc reply from http://jetson-desktop:36081/ time=1.078129ms
...
4.2、rqt_topic
rqt_topic查看话题的一个插件,能够知道各节点话题的具体实时变化情况,输入命令:
rosrun rqt_topic rqt_topic如下图:

可以看到,每个话题的详细信息,有Type消息类别、Bandwidth带宽、Hz频率、Value值。
我们点开/tf坐标系查看下里面有哪些属性,如下图:
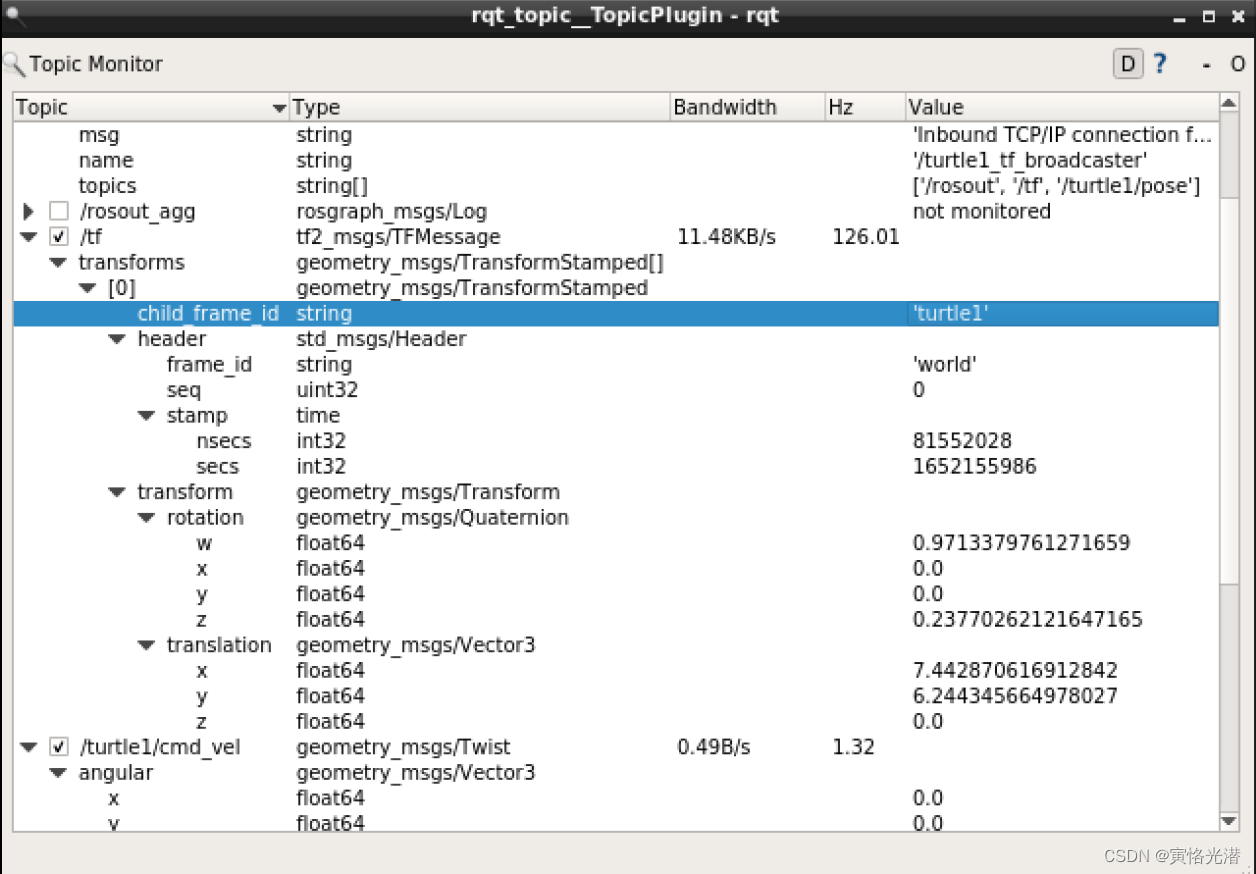
可以看到,指明了父坐标和子坐标,当然主要还是坐标的转换,其中时间戳有两个,一个纳秒和一个秒为单位的时间。
4.3、rqt_publisher
rqt_publisher用来发布具有固定或计算字段值的任意消息。输入命令:
rosrun rqt_publisher rqt_publisher
将会弹出如下图的界面:
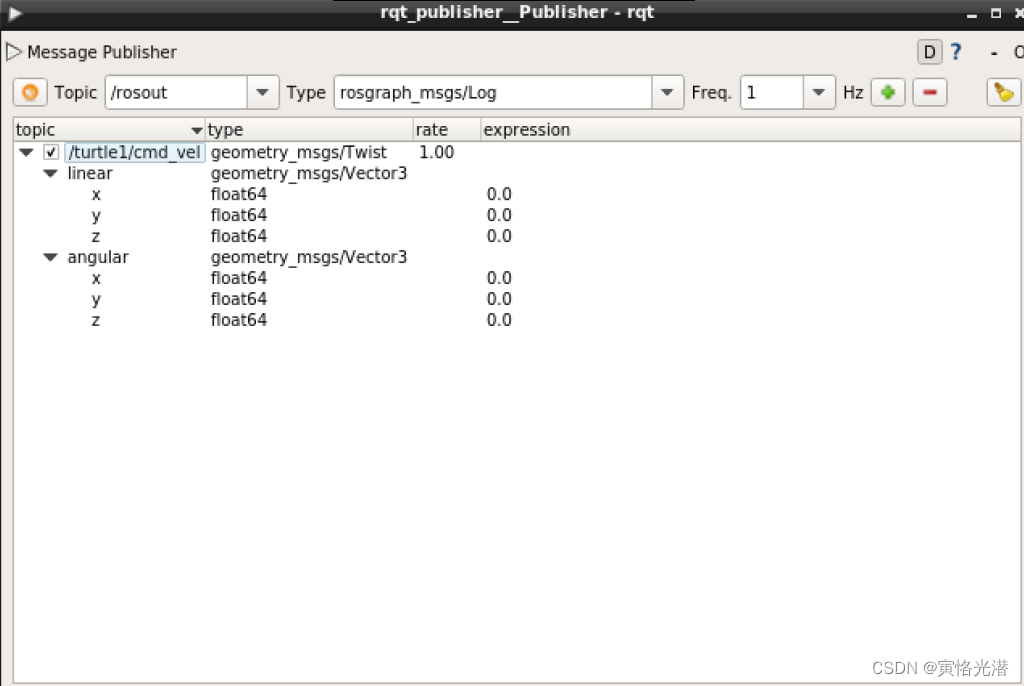
topic话题和type消息数据类型,都可以点击下拉框进行选择,频率的输入,然后点击+号添加进来。如下图:

然后就可以修改里面的expression字段对应的值,手动进行输入调试。
4.4、rviz
rviz是ROS自带的一个图形化工具,可以方便的对ros的程序进行图形化操作。输入命令:rviz
如下图:
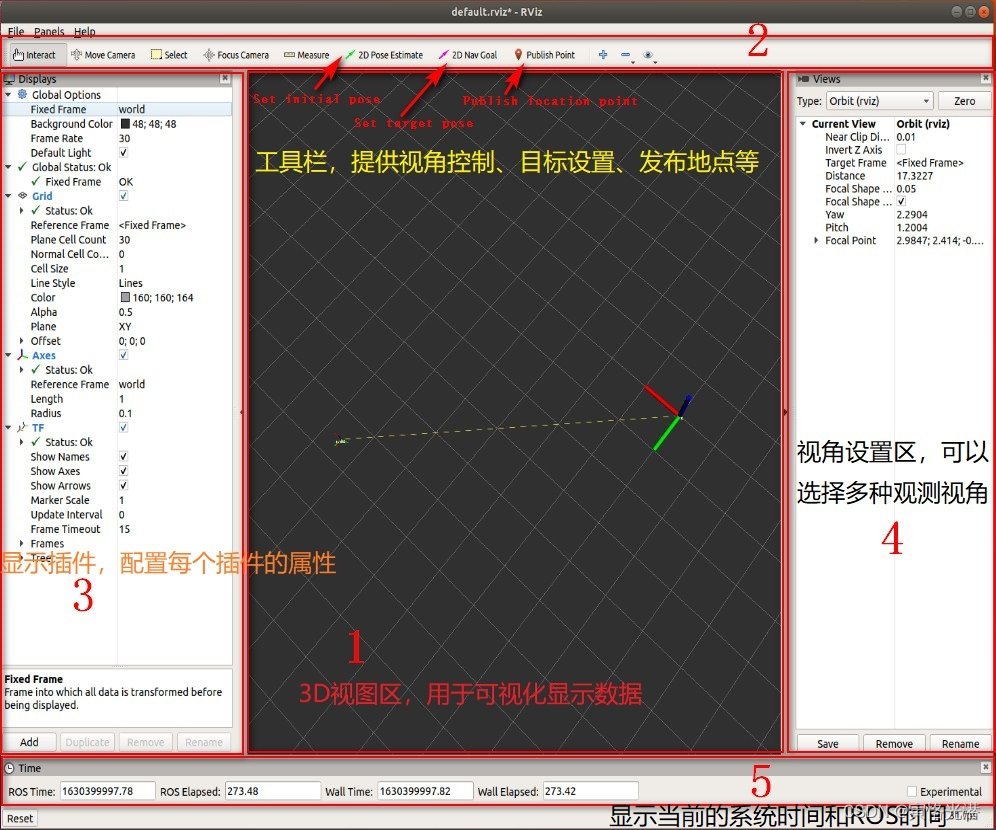
主要分5个功能区,如图中所标识的。其中工具栏中的Set initial pose、Set target pose、Publish location point:一般在建图导航时使用。
添加显示操作如图:
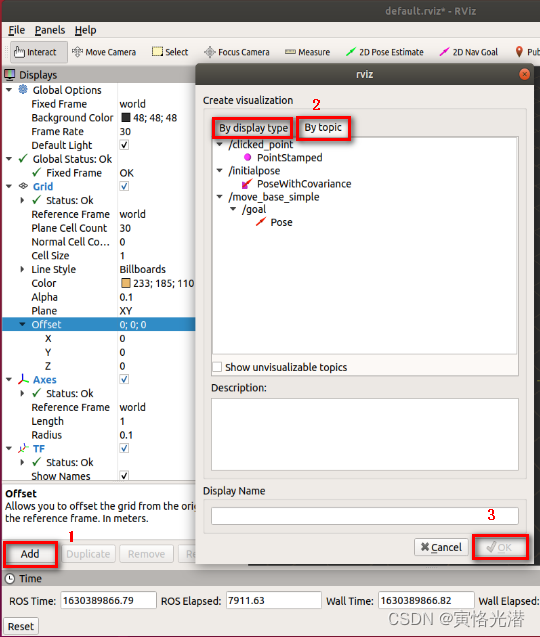
点击左下角的Add按钮,将会弹出一个界面,然后可以选择“By display type”通过显示类型来添加,不过需要自己修改对应话题,坐标系才可以显示出来;或者就是选择“By topic”通过话题的方式,直接添加就可以正常显示。最后点击右下角的OK按钮即可
最后温馨提示,在使用ROS核心工具和其他Linux命令的时候,常记得敲tab键,可以节省大量时间。
相关文章:
机器人TF坐标系变换与一些可视化工具的应用
TF坐标在ROS中是一个非常重要的概念,因为机器人在做日常操作任务的时候,对于其所在位置和朝向是需要时刻知道的,而机器人是由很多节点组成的协同任务,对于每个部件,我们需要知道它的位姿(位置和朝向),这使得…...
c++ 友元 运算符重载详解
友元 c是面向对象的,目的之一:封装 封装: 优点之一,就是安全。 缺点:在某些特殊的场合,不是很方便。 华为与IBM 40亿的咨询故事 IBM需要对华为各级部门做深度咨询分析, 为了提高咨询效率&a…...
DataWhale 机器学习夏令营第三期
DataWhale 机器学习夏令营第二期 学习记录一 (2023.08.18)1.赛题理解2.缺失值分析3. 简单特征提取4. 数据可视化离散变量离散变量分布分析 DataWhale 机器学习夏令营第三期 ——用户新增预测挑战赛 学习记录一 (2023.08.18) 已跑通baseline,换为lightgbm基线&#…...

回归预测 | MATLAB实现BES-LSSVM秃鹰搜索算法优化最小二乘支持向量机多输入单输出回归预测(多指标,多图)
回归预测 | MATLAB实现BES-LSSVM秃鹰搜索算法优化最小二乘支持向量机多输入单输出回归预测(多指标,多图) 目录 回归预测 | MATLAB实现BES-LSSVM秃鹰搜索算法优化最小二乘支持向量机多输入单输出回归预测(多指标,多图&a…...
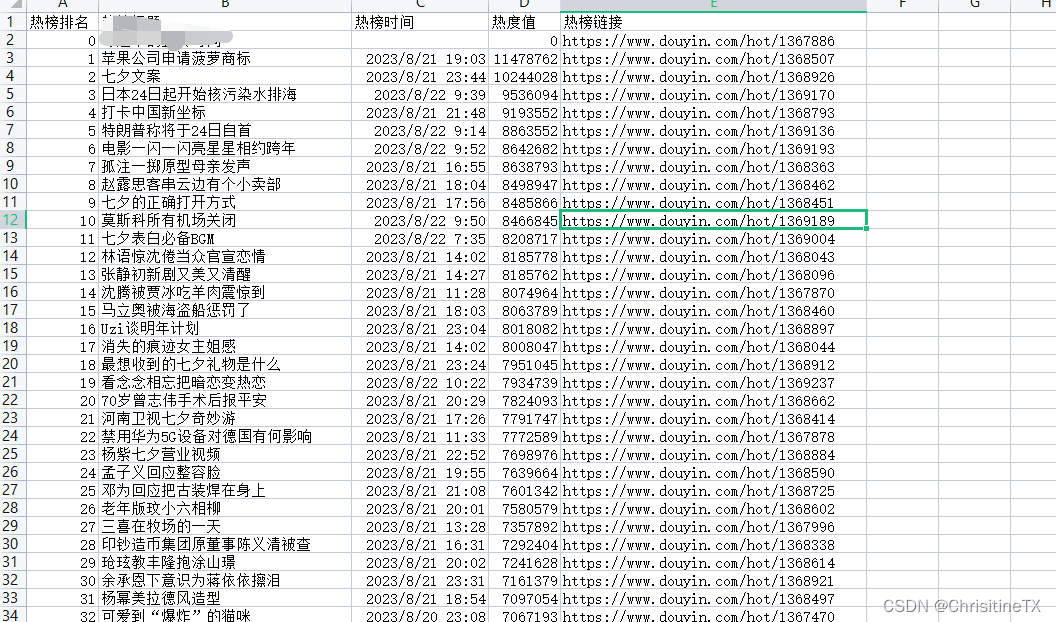
python分析实战(4)--获取某音热榜
1. 分析需求 打开某音热搜,选择需要获取的热榜如图 查找包含热搜内容的接口返回如图 将url地址保存 2. 开发 定义请求头 headers {Cookie: 自己的cookie,Accept: application/json, text/plain, */*,Accept-Encoding: gzip, deflate,Host: www.douyin.com,…...

Java根据List集合中的一个字段对集合进行去重
利用HashSet 创建了一个HashSet用于存储唯一的字段值,并创建了一个新的列表uniqueList用于存储去重后的对象。遍历原始列表时,如果字段值未在HashSet中出现过,则将其添加到HashSet和uniqueList中。 List<Person> originalList new Ar…...
)
(AtCoder Beginner Contest 315)
A.直接模拟即可 import random import sys import os import math from collections import Counter, defaultdict, deque from functools import lru_cache, reduce from itertools import accumulate, combinations, permutations from heapq import nsmallest, nlargest, h…...
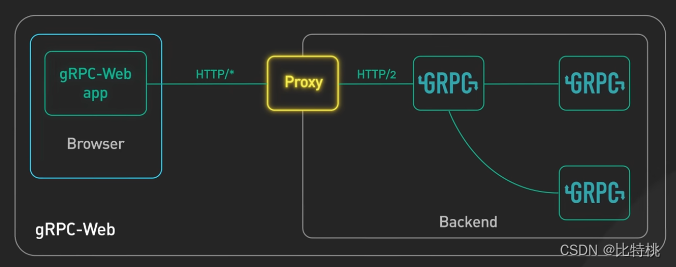
API 接口选择那个?RESTful、GraphQL、gRPC、WebSocket、Webhook
大家好,我是比特桃。目前我们的生活紧紧地被大量互联网服务所包围,互联网上每天都有数百亿次API调用。API 是两个设备相互通讯的一种方式,人们在手机上每次指尖的悦动,背后都是 API 接口的调用。 本文将列举常见的一些 API 接口&…...
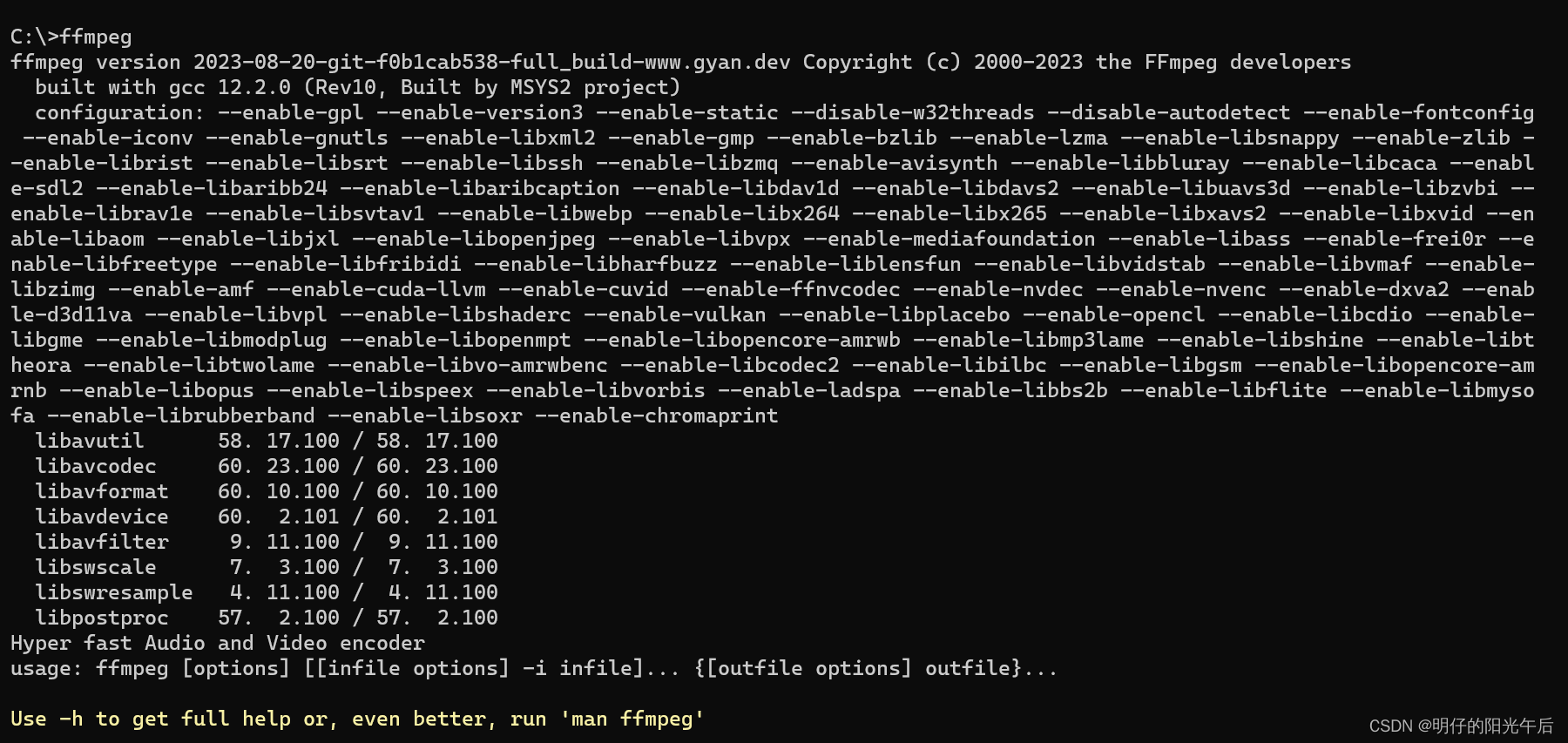
「Python|音视频处理|环境准备」如何在Windows系统下安装并配置音视频处理工具FFmpeg
本文主要介绍如何在Windows系统下安装并配置音视频处理工具FFmpeg,方便使用python进行音视频相关的下载或编辑处理。 文章目录 一、下载软件二、解压并配置三、验证安装 一、下载软件 首先要去 ffmpeg官网 下载软件包 由于上面直接下载的按钮是.tar.xz格式的。为了…...
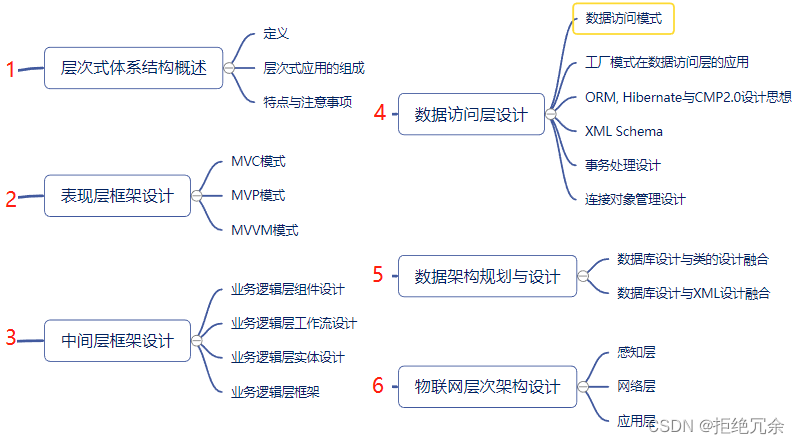
软考高级架构师下篇-12层次式架构设计理论与实践
目录 1. 考情分析2. 层次式体系结构概述3. 表现层框架设计4. 中间层框架设计5. 数据访问层设计6. 数据架构规划与设计7. 物联网层次架构设计8. 前文回顾1. 考情分析 根据考试大纲,层次式架构设计理论与实践知识点会涉及单选题型(约占2~5分)和案例题(25分),本小时内容偏重于方…...

234. 回文链表
234. 回文链表 给你一个单链表的头节点 head ,请你判断该链表是否为回文链表。如果是,返回 true ;否则,返回 false 。 /*** Definition for singly-linked list.* struct ListNode {* int val;* ListNode *next;* L…...
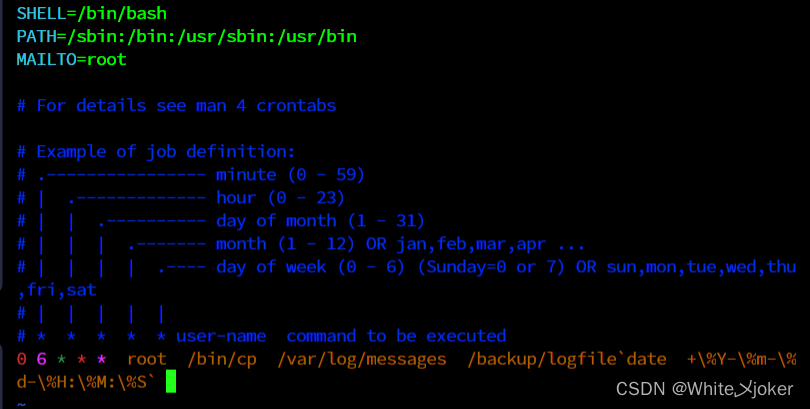
LInux之例行工作
目录 场景 单一执行例行任务 --- at(一次性) 安装 命令详解 语法格式 参数及作用 时间格式 案例 at命令执行过程分析 循环执行的例行性任务--crontab(周期性) crontd服务安装 linux 任务调度的工分类 crontab工作过程…...

C++,从“hello world“开始
一、"hello world" #inclue <iostream>using namespace std;int main() {cout << "hello world" << endl;return 0; } 1.1 #include:预处理标识 1.2 <iostream>:输入输出流类所在头文件 1.2.1 istream&a…...

/root/.ssh/config line 2: Bad protocol 2 host key algorithms ‘+ssh-rsa‘.
文章目录 1、问题2、查看openssh版本3、解决问题4、重新生成密钥5、查看是否可连接工蜂 1、问题 ssh访问工蜂报错: [rootlocalhost .ssh]# ssh -T gitgit.code.tencent.com /root/.ssh/config line 2: Bad protocol 2 host key algorithms ‘ssh-rsa’. 2、查看o…...

mac m1上系统内录内部声音的方法/无需安装Blackhole
总所周知,m1的mac不能录制桌面音频,obsstudio都不行。 最快的解决方法就是下载飞书: 登陆后新建直播/视频会议: 共享的时候选择下面的两个钩上去就好了...

数字人学习目录
数字人学习目录 百度PaddlePaddleHub图像风格迁移模型pp-tinypose模型 PaddleGANPaddleLitePaddleDetectionPP-TinyPose 人体骨骼关键点识别 PaddleSpeechVisualDLPaddleBobo TransformerWav2LibCLIPFFMpeg模型库数据集学习天地PythonJupyter Notebook Unity3DUE 百度Paddle P…...

PHP 房产网站系统Dreamweaver开发mysql数据库web结构php编程计算机网页项目
一、源码特点 PHP 房产网站系统是一套完善的WEB设计系统,对理解php编程开发语言有帮助,系统具有完整的源代码和数据库,系统主要采用B/S模式开发。 源码 https://download.csdn.net/download/qq_41221322/88233553 论文 https://download…...

0基础入门代码审计-2 Fortify初探
0x01 序言 目前又加入一位新童鞋了,最近将会再加入cs相关的专栏,都是以基础为主,毕竟太复杂的东西,能看懂的人太少。 0x02 准备工具 1、Fortify 2、需要审计的源码 0x03 Fortify的简单使用 1、 1、在开始菜单栏中找到Audit Wo…...

qiiuzhiji4
本篇是从慧与离职后到2023年8月21日这段时间的经历 2023/7/31至2023/8/21 本篇初次写于2023年8月21日 从慧与离职后基本上就是在专心找工作了,但是有在这段时间找工作经历的人都明白,IT行业不复以往了。尤其是对于我这样的普通二本学历的人来说ÿ…...
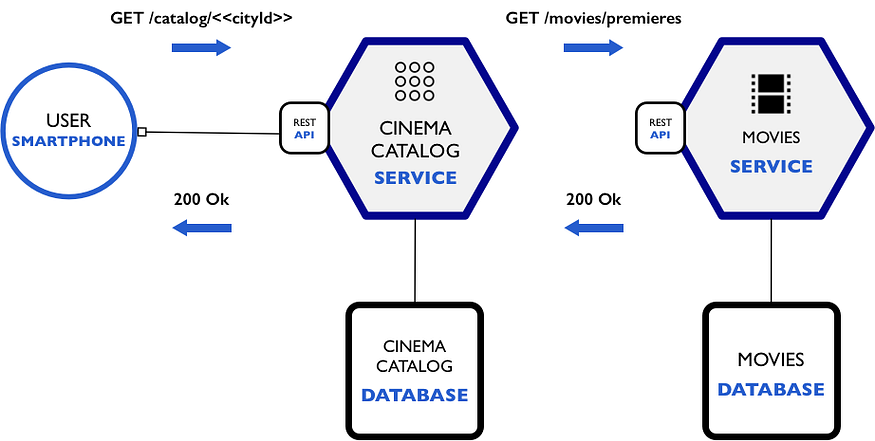
构建 NodeJS 影院微服务并使用 docker 部署【01/4】
图片来自谷歌 — 封面由我制作 一、说明 构建一个微服务的电影网站,需要Docker、NodeJS、MongoDB,这样的案例您见过吗?如果对此有兴趣,您就继续往下看吧。 在本系列中,我们将构建一个 NodeJS 微服务,并使用…...

Pinocchio库初体验:用Python快速验证你的双足机器人模型正逆解
Pinocchio库实战:Python双足机器人正逆运动学快速验证指南 当你第一次打开Pinocchio的文档时,可能会被那些复杂的数学公式和术语吓到。但别担心,我们今天要做的,就是抛开理论直接上手——用不到50行代码,让你的双足机…...

【仅限JDK 25 Early Access用户】:隐藏API `LinkerOptions` 强制启用向量化调用的2行代码,实测吞吐提升2.8倍
第一章:Java 25 外部函数接口优化案例Java 25 正式将外部函数与内存 API(Foreign Function & Memory API)从预览特性转为正式特性,显著提升了 JVM 与本地代码交互的安全性、性能与开发体验。相比早期 JNI 方案,FFM…...

从羊肠小道到智能高速:HTTP1到HTTP3的演进之路
引言 计算机网络就像一张遍布全球的道路系统,服务器是一座座城市、村庄,客户端是穿梭其中的车辆,而HTTP协议,就是规范车辆通行、货物传递的交通规则。从HTTP1到HTTP3的演进,本质上就是这条“网络道路”的升级史——从泥…...

别再傻等DockerHub了!手把手教你配置阿里云镜像加速,5分钟搞定MySQL 8.0拉取
国内开发者必备:5分钟配置Docker镜像加速全攻略 每次在终端输入docker pull后,看着进度条像蜗牛一样缓慢移动,或者干脆直接报错Error response from daemon,这种体验对国内开发者来说再熟悉不过了。DockerHub的服务器远在海外&am…...

Qwen3-TTS快速部署教程:一键启动Web服务,3分钟开始声音克隆
Qwen3-TTS快速部署教程:一键启动Web服务,3分钟开始声音克隆 1. 为什么选择Qwen3-TTS进行语音克隆 想象一下这样的场景:你需要为海外客户录制多语言产品介绍,但雇佣专业配音演员成本高昂;或者想为自己的视频内容添加个…...

TTL门电路在现代数字设计中的应用:从基础到OC门实战
TTL门电路在现代数字设计中的应用:从基础到OC门实战 在数字电路设计的工具箱里,TTL(晶体管-晶体管逻辑)门电路就像瑞士军刀一样经典而实用。尽管CMOS技术如今占据主流,但TTL在特定场景下依然展现出独特的优势。特别是在…...

RVC与FunASR联动:中文语音识别+AI翻唱端到端流水线
RVC与FunASR联动:中文语音识别AI翻唱端到端流水线 1. 引言:当AI翻唱遇见语音识别 想象一下这个场景:你有一段喜欢的歌曲音频,想用自己的声音翻唱它,但苦于记不住歌词,或者原唱语速太快跟不上。传统的做法…...

3步解锁音乐自由:NCMDump帮你破解网易云音乐NCM格式
3步解锁音乐自由:NCMDump帮你破解网易云音乐NCM格式 【免费下载链接】ncmdump 项目地址: https://gitcode.com/gh_mirrors/ncmd/ncmdump 还在为下载的网易云音乐只能在特定App里播放而烦恼吗?当你精心挑选的歌单无法在车载音响、运动手表或家庭音…...

.NET源码生成器使用SyntaxTree生成代码及简化语法
一、SyntaxTree是什么SyntaxTree是语法树,是源代码的树形结构表示由Roslyn编译器生成在SourceGenerator中会自动生成整个源代码结构是1个SyntaxTreeSyntaxTree有一个根节点(SyntaxNode)每个SyntaxNode也包含一个SyntaxTree这样看整个源代码结构就是片“森林”public abstract p…...

FairyGUI在CocosCreator中的高级应用:异步加载、事件处理与性能优化技巧
FairyGUI在CocosCreator中的高阶实战:异步架构设计与性能调优全指南 当你的CocosCreator项目UI复杂度达到临界点时,传统的资源加载和事件处理方式往往会成为性能瓶颈。FairyGUI作为专业UI解决方案,其深度集成能力可以彻底改变这种局面——但真…...