Ubuntu系统安装之后首需要做的事情
Ubuntu系统的初步环境搭建
- 1、换源
- 2、显卡
- 3、浏览器
- 4、输入法
- 5、终端
- 6、ROS
- 7、VSCode
- 8、设置时间与win一致
- 9、 TimeShift
- 10、 Anaconda(考虑装不装)
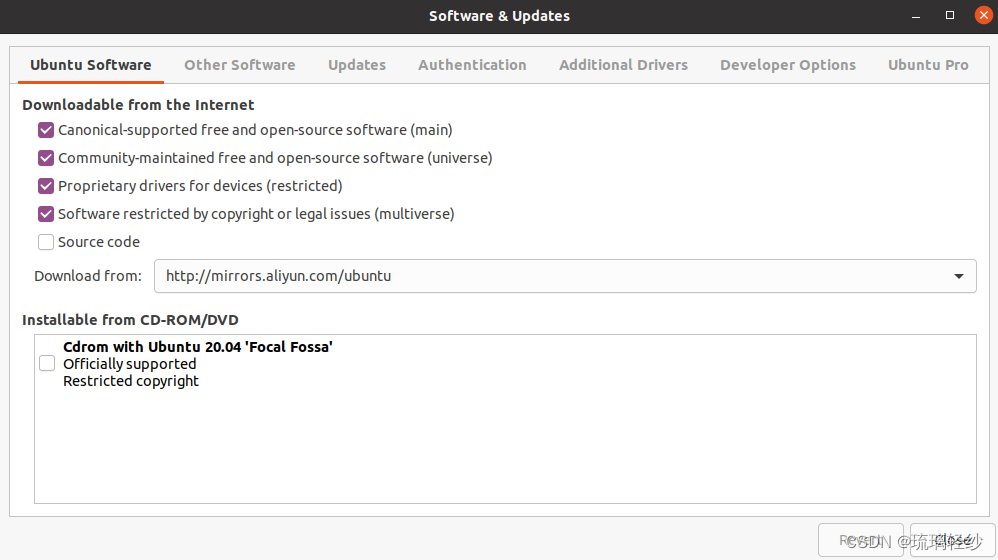
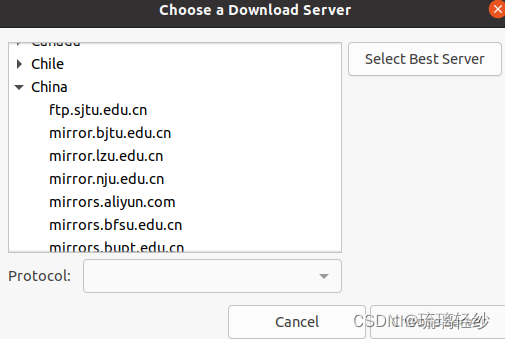
1、换源
点开Software&&Update,找到Ubuntu Software中的Download from,点击other,上划找到China,里面有阿里源、清华源等。
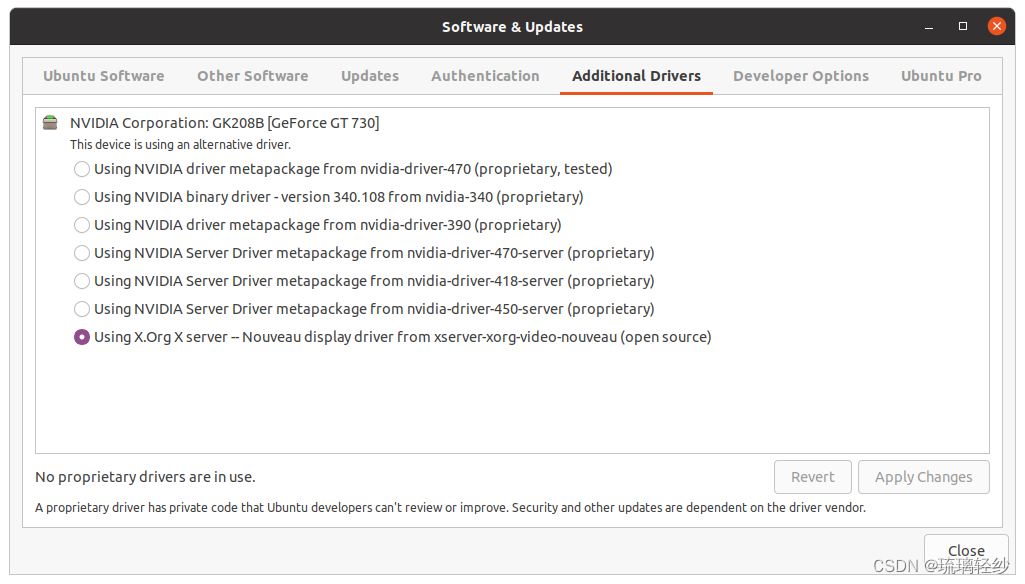
2、显卡
显卡可根据自己的电脑硬件配置来,这里我选择了不改变。
3、浏览器
可以在Ubuntu系统中安装Edge,从以下官网下载。
https://www.microsoft.com/en-us/edge?form=MA13FJ
下载完毕之后,在左下角可以查看图标。点击、添加到我的最爱,即可在左边看到图标。
4、输入法
第一个网址是输入法下载的网址:
https://shurufa.sogou.com/linux
第二个网址是Linux系统的搜狗舒服法下载网址,点击下载完就可以直接会弹出详细的操作步骤:
https://shurufa.sogou.com/linux/guide
5、终端
这是一个学习ros基础的网站,里面有安装多功能终端的内容:
http://www.autolabor.com.cn/book/ROSTutorials/
安装终端的网页:
http://www.autolabor.com.cn/book/ROSTutorials/chapter1/14-ros-ji-cheng-kai-fa-huan-jing-da-jian/141-an-zhuang-zhong-duan.html
安装终端的命令:
sudo apt install terminator
6、ROS
安装ROS系统,可以直接运行下面的命令,此命令可以一键安装ROS,也可以直接选择一些其他的安装。
wget http://fishros.com/install -O fishros && . fishros
7、VSCode
安装VSCode系统,可以直接运行下面的命令,此命令可以一键安装VSCode,也可以直接选择一些其他的安装。
wget http://fishros.com/install -O fishros && . fishros
8、设置时间与win一致
因为是在Win10上安装了Ubuntu20.04的系统,Ubuntu系统和Windows系统时间不统一,参照以下网址进行的调整。
https://blog.csdn.net/X_T_S/article/details/110142773
9、 TimeShift
应为虚拟机可以拍摄快照,因此发生错误时可以退回到之前的系统状态
Timeshift,它使用完全备份的方式,直接将整个操作系统包括个人配置全部备份打包。也就是全盘备份。
操作过程按照以下网址进行:
https://blog.csdn.net/qq_44164791/article/details/132413500
10、 Anaconda(考虑装不装)
我还在考虑要不要安装,应为后期工作可能会应用,但是也有很大的软件版本冲突的问题,我暂时还没有安装,如果想安装可以参照以下网址的过程进行:
https://blog.csdn.net/qq_29225913/article/details/105347317
相关文章:
Ubuntu系统安装之后首需要做的事情
Ubuntu系统的初步环境搭建 1、换源2、显卡3、浏览器4、输入法5、终端6、ROS7、VSCode8、设置时间与win一致9、 TimeShift10、 Anaconda(考虑装不装) 1、换源 点开Software&&Update,找到Ubuntu Software中的Download from,…...

Qt——QPushButton控件的常见属性、方法和信号
Qt中QPushButton控件的常见属性、方法和信号 一、QPushButton控件常见属性 一、QPushButton控件常见方法 一、QPushButton控件常见信号 一、QPushButton控件常见属性(Properties) 1. text: 描述:按钮上显示的文本。 用法: butto…...
5.5 基于ISOLAR-A的系统级设计与配置方法(上))
AUTOSAR规范与ECU软件开发(实践篇)5.5 基于ISOLAR-A的系统级设计与配置方法(上)
目录 前言 1 系统配置输入文件创建与导入 2、 Composition SWC建立 前言 如前所述, AUTOSAR支持整车级别的软件架构设计, 开发人员可以进行整车级别的软件组件定义, 再将这些软件组件分配到各个ECU中, 这就是AUTOSAR系统级设计需要完成的主要任务。 下面结合AUTOSAR方法论…...

mongoDB的CRUD
...

flutter TARGET_SDK_VERSION和android 13
config.gradle ext{SDK_VERSION 33MIN_SDK_VERSION 23TARGET_SDK_VERSION 33COMPILE_SDK_VERSION SDK_VERSIONBUILD_TOOL_VERSION "33.0.0"//兼容库版本SUPPORT_LIB_VERSION "33.0.0"}app/build.gradle里面的 defaultConfig {// TODO: Specify your…...

大数据Flink(六十六):Flink的重要概念和小结
文章目录 Flink的重要概念和小结 一、数据流图(Dataflow Graph)...
Rider 添加NuGet软件包 (NuGet Package)
如图,在解决方案中选择自己的项目右键,点击管理 NuGet 软件包即可 在搜索栏中搜索自己要使用的软件包安装即可使用...
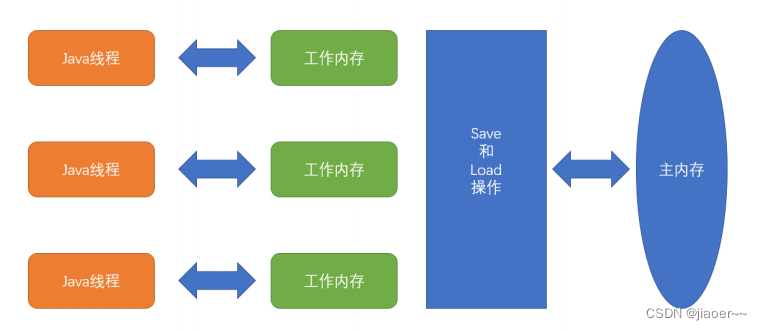
什么是JVM ?
一、JVM 简介 JVM 是 Java Virtual Machine 的简称,意为 Java 虚拟机。 虚拟机是指通过软件模拟的具有完整硬件功能的、运行在一个完全隔离的环境中的完整计算机系统。 常见的虚拟机: JVM 、 VMwave 、 Virtual Box 。 JVM 和其他两个虚拟机的区别…...

【大数据】Hive 中的批量数据导入
Hive 中的批量数据导入 在博客【大数据】Hive 表中插入多条数据 中,我简单介绍了几种向 Hive 表中插入数据的方法。然而更多的时候,我们并不是一条数据一条数据的插入,而是以批量导入的方式。在本文中,我将较为全面地介绍几种向 H…...
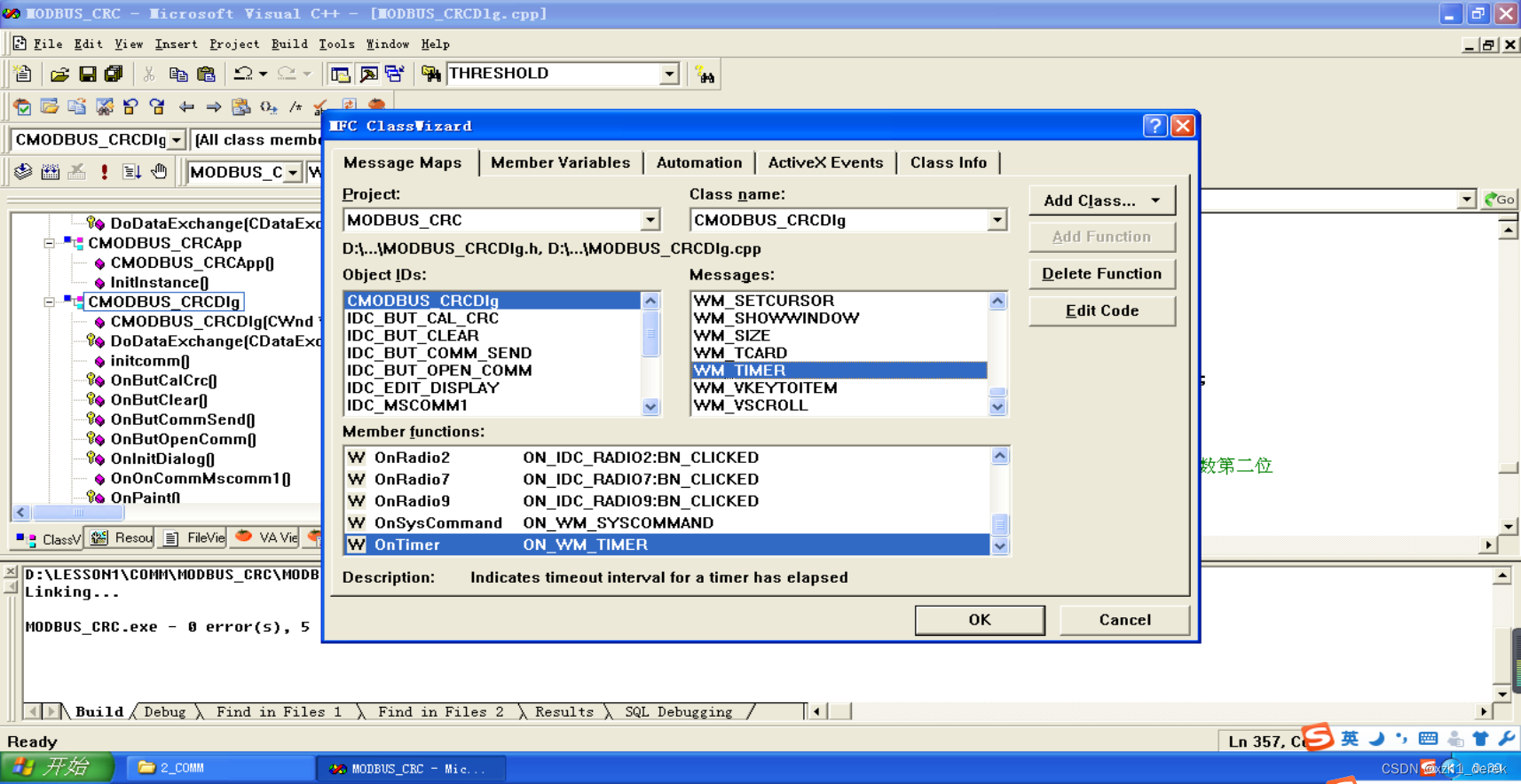
【Modbus通信实验三】数据切片问题
在做两个串口相互通信的实验中,当发送频率快一点时偶尔会遇到以下情景,即一次send中把原数据拆成两份发送,就会导致CRC校验错误。下图中6字节数据拆成42是把SetRThreshold()阈值设为2,当设为1的情况下则会拆成51。 一开始以为是缓…...
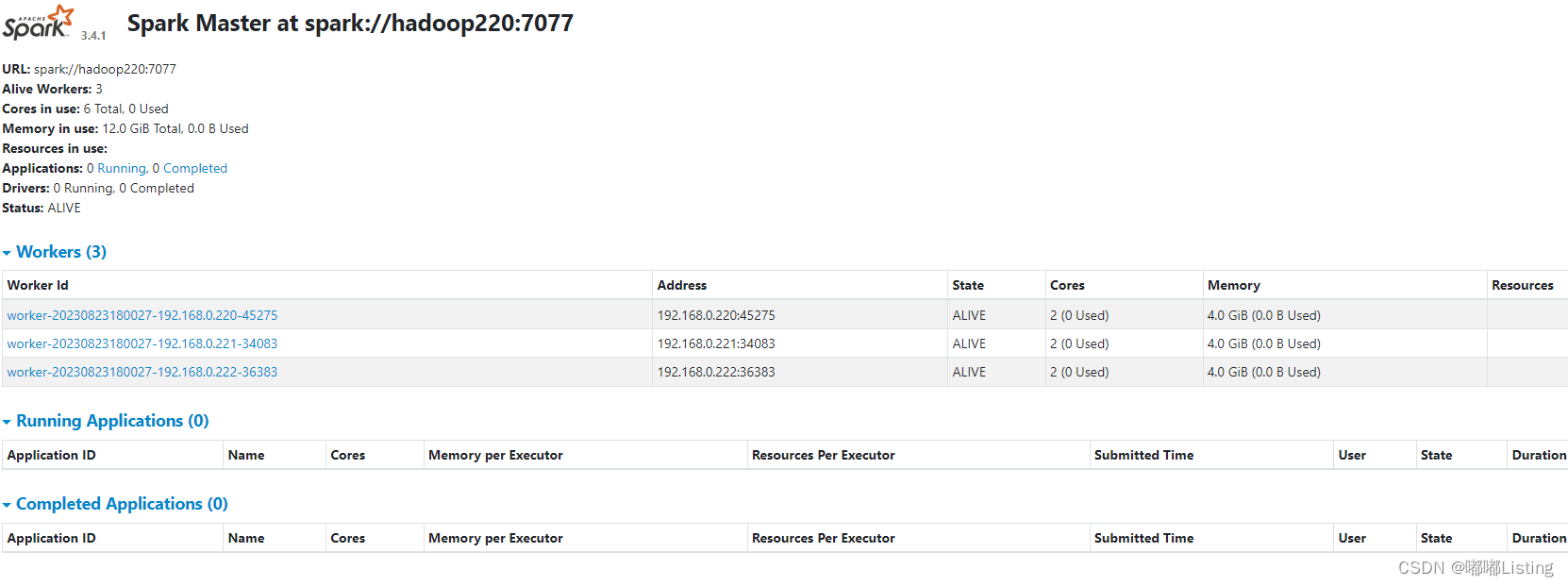
记录《现有docker中安装spark3.4.1》
基础docker环境中存储hadoop3--方便后续查看 参考: 实践: export JAVA_HOME/opt/apache/jdk1.8.0_333 export SPARK_MASTER_IP192.168.0.220 export SPARK_WORKER_MEMORY4g export SPARK_WORKER_CORES2 export SPARK_EXECUTOR_MEMORY4g export HADOOP_H…...
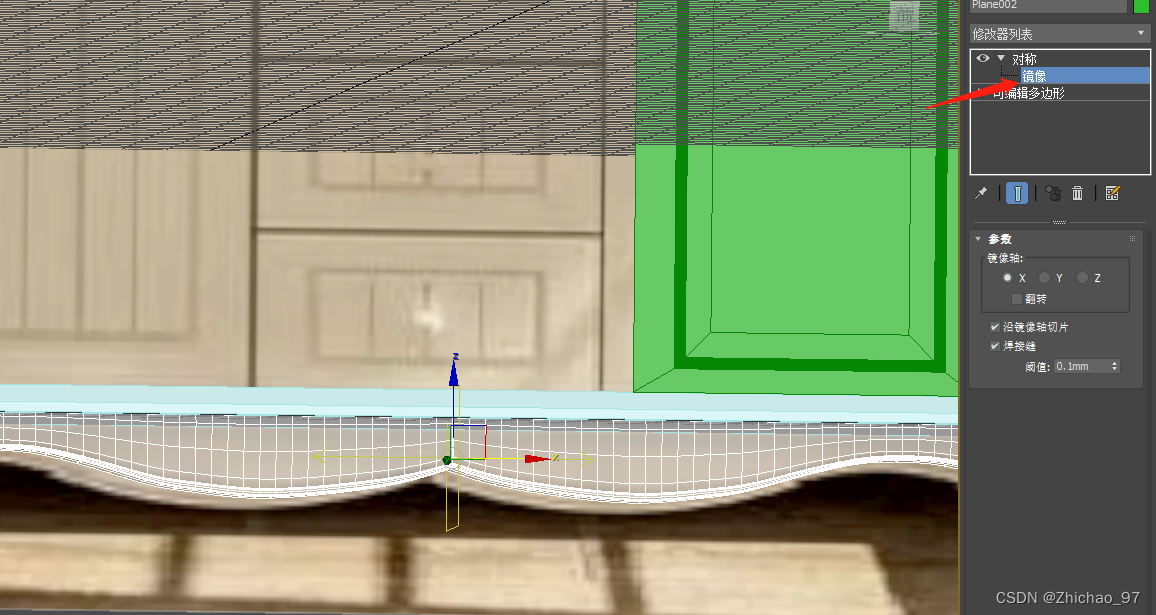
【3ds Max】练习——制作衣柜
目录 步骤 一、制作衣柜顶部 二、制作衣柜门板 三、制作衣柜底部 四、制作柜子腿部 五、制作柜子底板 步骤 一、制作衣柜顶部 1. 首先创建一个平面,然后将图片素材拖入平面 2. 平面大小和图片尺寸比例保持一致 3. 单机鼠标右键,选择对象属性 勾选…...

Spring-MVC的数据响应-19
在访问服务端MVC的时候,这个controller层进行相应操作之后 他要做两件事:页面跳转和返回字符串,在做完这些操作之后,我们一般进行页面展示:排除页面展示之外,有些需求可能直接回写给我们一些数据: 页面跳…...
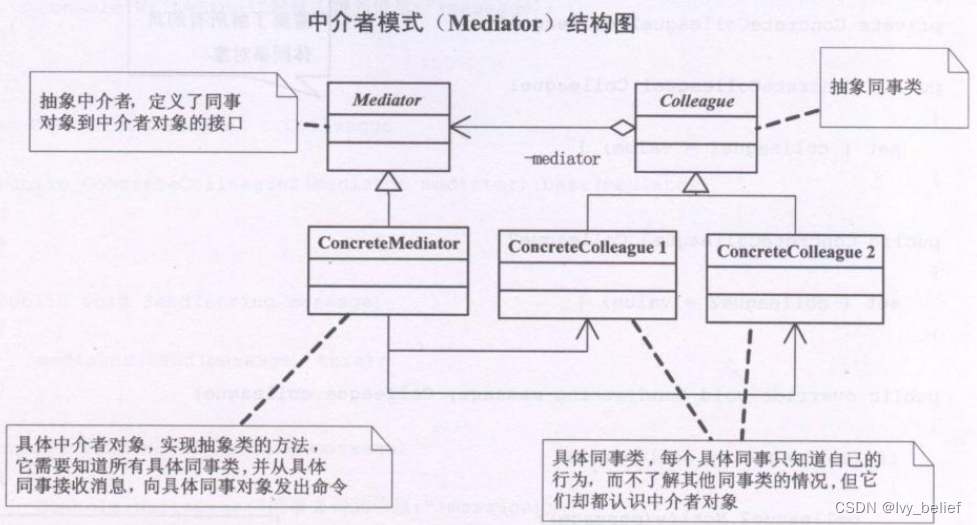
(三)行为模式:5、中介者模式(Mediator Pattern)(C++示例)
目录 1、中介者模式(Mediator Pattern)含义 2、中介者模式的UML图学习 3、中介者模式的应用场景 4、中介者模式的优缺点 (1)优点 (2)缺点 5、C实现中介者模式的实例 1、中介者模式(Media…...

期权是什么?期权的优缺点是什么?
期权是一种合约,有看涨期权和看跌期权两种类型,也就是做多和做空两个方向,走势标的物对应大盘指数,这也是期权与其他金融工具的主要区别之一,可以用于套利,对冲股票和激进下跌的风险,下文介绍期…...

目标检测任务数据集的数据增强中,图像垂直翻转和xml标注文件坐标调整
需求: 数据集的数据增强中,有时需要用到图像垂直翻转的操作,图像垂直翻转后,对应的xml标注文件也需要做坐标的调整。 解决方法: 使用pythonopencvimport xml.etree.ElementTree对图像垂直翻转和xml标…...

html5提供的FileReader是一种异步文件读取文件中的数据
前言:FileReader是一种异步文件读取机制,结合input:file可以很方便的读取本地文件。 input:file 在介绍FileReader之前,先简单介绍input的file类型。 <input type"file" id"file"> input的file类型会渲染为一个按…...

Linux学习记录——이십오 多线程(2)
文章目录 1、理解原生线程库线程局部存储 2、互斥1、并发代码(抢票)2、锁3、互斥锁的实现原理 3、线程封装1、线程本体2、封装锁 4、线程安全5、死锁6、线程同步1、条件变量1、接口2、demo代码 1、理解原生线程库 线程库在物理内存中存在,也…...
单片机(二)使用位移 让灯亮
一:硬件电路 P2 口: P2.0~ P2.7 是这些 I0 口 LED 阳极接 电源 , P20 口 为低电平 可以让 LED灯 亮 二:软件实现部分 两种 ① 通过循环 来展示从左 到右 #include "reg52.h"#define LED_PORT P2 // 定义单片机的P2端…...

探究代理服务器在网络安全与爬虫中的双重作用
在如今高度互联的世界中,代理服务器已经成为网络安全和爬虫开发的关键工具。本文将深入探讨Socks5代理、IP代理、网络安全、爬虫、HTTP等关键词,以揭示代理服务器在这两个领域中的双重作用,以及如何充分利用这些技术来保障安全和获取数据。 …...

Sora 2正式版突然开放API灰度权限?我们逆向解析了127行响应头与rate limit策略,发现3个隐藏调用阈值
更多请点击: https://intelliparadigm.com 第一章:Sora 2正式版核心能力与架构演进 Sora 2正式版标志着视频生成大模型从研究原型迈向工业级部署的关键跃迁。其底层架构采用分层时空联合建模(Hierarchical Spatio-Temporal Transformer&…...

2026.5.12:三台服务器,一台fastapi的websocket服务接口,一台代理fastapi服务的nginx,一台代理上一个nginx,能穿透websocket吗?
三台服务器,一台fastapi的websocket服务接口,一台代理fastapi服务的nginx,一台代理上一个nginx,能穿透websocket吗? 环境: - 三台服务器 1. 一台fastapi中有websocket接口的服务器:43.226.44.50 2. 一台代理上面1里面的fastapi服务的nginx:43.226.44.184 3. 一台代…...

首次接入Taotoken时如何通过模型广场测试不同模型的响应效果
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 首次接入Taotoken时如何通过模型广场测试不同模型的响应效果 当你开始使用Taotoken平台,面对众多可选的模型࿰…...

Hermes Agent项目中集成Taotoken自定义供应商教程
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Hermes Agent项目中集成Taotoken自定义供应商教程 对于使用Hermes Agent框架的开发者而言,直接调用单一模型服务商有时…...

基于SEID模型与ode45数值解的艾滋病传播动力学建模与区域防控策略评估
1. 当数学模型遇上艾滋病防控 我第一次接触传染病建模是在研究生时期,当时导师扔给我一叠艾滋病流行病学数据,说:"试试用微分方程描述这个传播过程"。那会儿对着密密麻麻的病例报告,我完全没想到数学公式真能模拟现实中…...
及适用场景)
告别预装旧版Demo:详解mmWave SDK两种刷写模式(Demonstration vs. CCS Development)及适用场景
告别预装旧版Demo:详解mmWave SDK两种刷写模式(Demonstration vs. CCS Development)及适用场景 当你第一次拿到毫米波雷达评估模块(EVM)时,预装的Demo固件可能已经过时半年甚至更久。这时候你会面临一个关键…...

【实战篇】Nginx反向代理负载均衡:从轮询到权重的策略演进
1. 反向代理与负载均衡基础认知 第一次接触Nginx的反向代理功能时,我盯着配置文件里的proxy_pass参数看了半天。这行看似简单的配置,背后其实隐藏着现代分布式系统的核心设计思想。想象一下这样的场景:当你在电商网站点击"立即购买"…...

6自由度KUKA机械臂自主抓取系统:ROS架构设计与逆运动学技术实现深度解析
6自由度KUKA机械臂自主抓取系统:ROS架构设计与逆运动学技术实现深度解析 【免费下载链接】pick-place-robot Object picking and stowing with a 6-DOF KUKA Robot using ROS 项目地址: https://gitcode.com/gh_mirrors/pi/pick-place-robot 在工业自动化领…...

高校食堂学生信息录入系统开发实战|从0到1搭建简易Web系统
大家好~ 最近完成了一个适合高校课程作业、小型食堂管理使用的「大学食堂学生信息录入系统」,全程用纯前端技术实现,无需复杂后端环境,双击即可运行,今天就来分享一下开发全过程、功能细节和使用技巧,适合刚…...

芯片验证工程师的思维模式:从职业本能到生活与管理的利器
1. 从“找茬”到“共生”:一位芯片验证工程师的职业心路 “今天又抓了几个bug?” 这可能是我们验证工程师之间最常听到的问候语,其频率仅次于“咖啡机在哪”。十多年前,当我读到那篇关于“Bug是否侵扰了生活”的专栏时࿰…...