BN、SyncBN、IN、LN、GN学习记录
1 BatchNorm
BN的原理
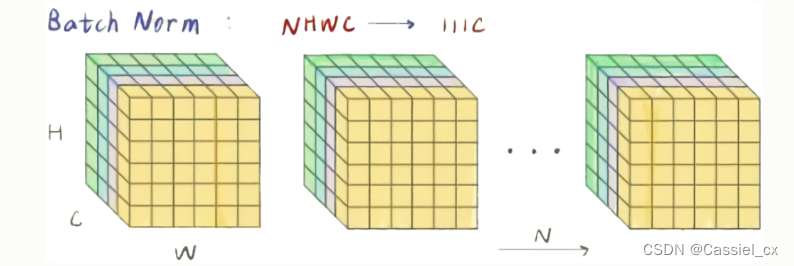
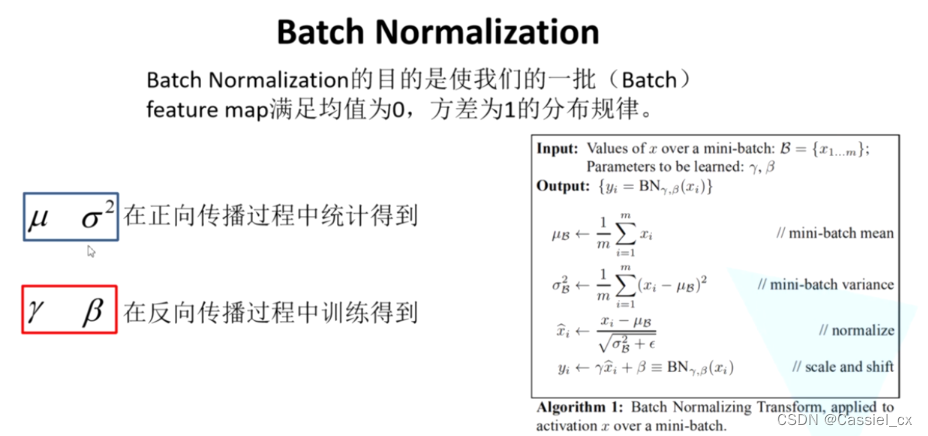
BN是计算机视觉最常用的标准化方法,它沿着N、H、W维度对输入特征图求均值和方差,随后再利用均值和方差来归一化特征图。计算过程如下图所示,1)沿着通道维度计算其他维度的均值;2)沿着通道维度计算其他维度的方差;3)归一化特征图;4)加入可学习参数γ和β(在每次反向传播后更新),对归一化的特征图进行包含缩放和平移的仿射操作,

pytorch中的BN有三种:torch.nn.BatchNorm1d、torch.nn.BatchNorm2d、torch.nn.BatchNorm3d。这里拿torch.nn.BatchNorm2d来举例,它的参数如下,
Args:num_features: 输入特征通道数eps: 为保证数值稳定性(分母不能趋近或取0), 给分母加上的值, 默认值是1e-5momentum: 计算running_mean和running_var时使用的动量(指数平均因子), 默认值是0.1affine: 布尔值, 是否给BN层添加仿射变换的可学习参数γ和β, 默认为Truetrack_running_stats: 布尔值, 是否记录训练中的running mean和variance, 若为False, 则该BN层在训练和验证阶段都只在当前输入中统计mean和variance, 如果此时的batch_size比较小, 那么其统计特性就会和全局统计特性有着较大偏差,可能导致糟糕的效果. 默认值为True更新running_mean和running_var的公式

其中, 为模型更新前的running_mean或running_var,
为模型更新前的running_mean或running_var, 为此次输入的mean或者var。在验证时(model.eval()),running_mean和running_var被视为均值和方差来标准化输入张量。
为此次输入的mean或者var。在验证时(model.eval()),running_mean和running_var被视为均值和方差来标准化输入张量。
BN的优点
BN使得网络中每层输入数据的分布相对稳定(可以使用较大的学习率),不仅极大提升了训练速度,收敛过程大大加快;
BN使得模型对网络中的参数不那么敏感,减弱对初始化的强依赖性,简化调参过程,使得网络学习更加稳定;
BN允许网络使用饱和性激活函数(例如sigmoid等),归一化后的数据,能让梯度维持在比较大的值和变化率,缓解梯度消失或者爆炸;
有轻微的正则化作用(相当于给隐藏层加入噪声,类似Dropout,能缓解过拟合。
BN的缺点
对batchsize的大小比较敏感。如果batchsize太小,则计算的均值、方差不足以代表整个数据分布。小的bathsize引入的随机性更大,难以达到收敛;
不适合于RNN、风格迁移等任务。拿风格迁移举例,由于Mini-Batch内可能存在多张无关的图片,去计算这些图片的均值和方差会弱化单张图片本身特有的一些细节信息。
代码实例
(1)随机初始化输入张量和实例化BN
import torch
import torch.nn as nn# 固定随机种子, 使随机生成的input每次都一样
torch.manual_seed(42)
# 随机生成形状为[1,2,2,2]输入
input = torch.randn((1,2,2,2)).cuda()
print('input:', input)# 实例化BN
bn = nn.BatchNorm2d(num_features=2, eps=0.00001, momentum=0.1, affine=True, track_running_stats=True).cuda()
bn.running_mean = (torch.ones([2])*2).cuda()
bn.running_var = (torch.ones([2])*1).cuda()
bn.train()
# 查看模型更新前的参数
print('trainning:', bn.training)
print('running_mean:', bn.running_mean)
print('running_var:', bn.running_var)
print('weight:', bn.weight) # γ, 初始值为1
print('bias:', bn.bias) # β, 初始值为0# 打印结果
'''
input: tensor([[[[ 0.3367, 0.1288],[ 0.2345, 0.2303]],[[-1.1229, -0.1863],[ 2.2082, -0.6380]]]], device='cuda:0')
trainning: True
running_mean: tensor([2., 2.], device='cuda:0')
running_var: tensor([1., 1.], device='cuda:0')
weight: Parameter containing:
tensor([1., 1.], device='cuda:0', requires_grad=True)
bias: Parameter containing:
tensor([0., 0.], device='cuda:0', requires_grad=True)
'''(2)经过BN层,获取输出结果
# 输出
output = bn(input)
print('output:', output)# 查看模型更新后的参数
print('trainning:', bn.training)
print('running_mean:', bn.running_mean)
print('running_var:', bn.running_var)
print('weight:', bn.weight)
print('bias:', bn.bias)# 打印结果, 由于没有反向传播, 所以γ和β值不变
'''
output: tensor([[[[ 1.4150, -1.4102],[ 0.0257, -0.0305]],[[-0.9276, -0.1964],[ 1.6731, -0.5491]]]], device='cuda:0',grad_fn=<CudnnBatchNormBackward0>)
trainning: True
running_mean: tensor([1.8233, 1.8065], device='cuda:0')
running_var: tensor([0.9007, 1.1187], device='cuda:0')
weight: Parameter containing:
tensor([1., 1.], device='cuda:0', requires_grad=True)
bias: Parameter containing:
tensor([0., 0.], device='cuda:0', requires_grad=True)
'''(3)根据BN的原理,自己写一段归一化代码
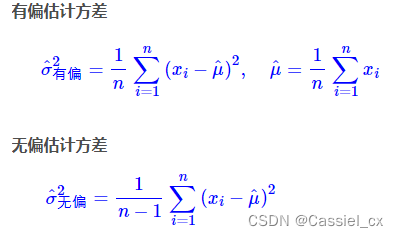
# 计算输入数据的均值和方差. 注意, torch.var()函数中unbiased默认为True,表示方差的无偏估计,这里需将它设为False
cur_mean = torch.mean(input, dim=[0,2,3])
cur_var = torch.var(input, dim=[0,2,3], unbiased=False)
print('cur_mean:', cur_mean)
print('cur_var:', cur_var)# 计算running_mean和running_var
new_mean = (torch.ones([2])*2) * (1-bn.momentum) + cur_mean * bn.momentum
new_var = (torch.ones([2])*1) * (1-bn.momentum) + cur_var * bn.momentum
print('new_mean:', new_mean)
print('new_var:', new_var)# 打印结果, 可以看到, 计算出的new_mean和new_var与步骤2的running_mean和running_var一致
'''
cur_mean: tensor([0.2326, 0.0653])
cur_var: tensor([0.0072, 2.1872])
new_mean: tensor([1.8233, 1.8065])
new_var: tensor([0.9007, 1.1187])
'''# 计算输出结果, 训练时用当前数据的mean和方差做标准化, 验证时用running_mean和running_var做标准化
output2 = (input - cur_mean) / torch.sqrt(cur_var + bn.eps)
print('output2:', output2)# 打印结果, 可以看到, 计算出的output2与步骤2的output一致
'''
output2: tensor([[[[ 1.4150, -1.4102],[ 0.0257, -0.0305]],[[-0.9276, -0.1964],[ 1.6731, -0.5491]]]])
'''
2 SyncBatchNorm
BN的效果与batchsize的大小有很大关系。而像目标检测、语义分割这些任务,占用显存较高,每张卡分到的图片数就会变少,而在DP模式下,每张卡只能拿到自己那部分的计算结果。为了在验证或者测试模型时使用相同的running_mean和running_var,DP模式便只拿主卡上计算的均值和方差去更新running_mean和running_var,BN的效果自然就会变差。一个解决思路就是用SyncBN代替BN,使用全局的BN统计量来标准化输入,相比于单卡的BN统计量,全局的BN统计量会更准确。
SyncBatchNorm的原理
本小节的两张图片来自:https://cloud.tencent.com/developer/article/2126838
(1)计算各张卡的均值和方差

(2)同步各卡之间的均值和方差
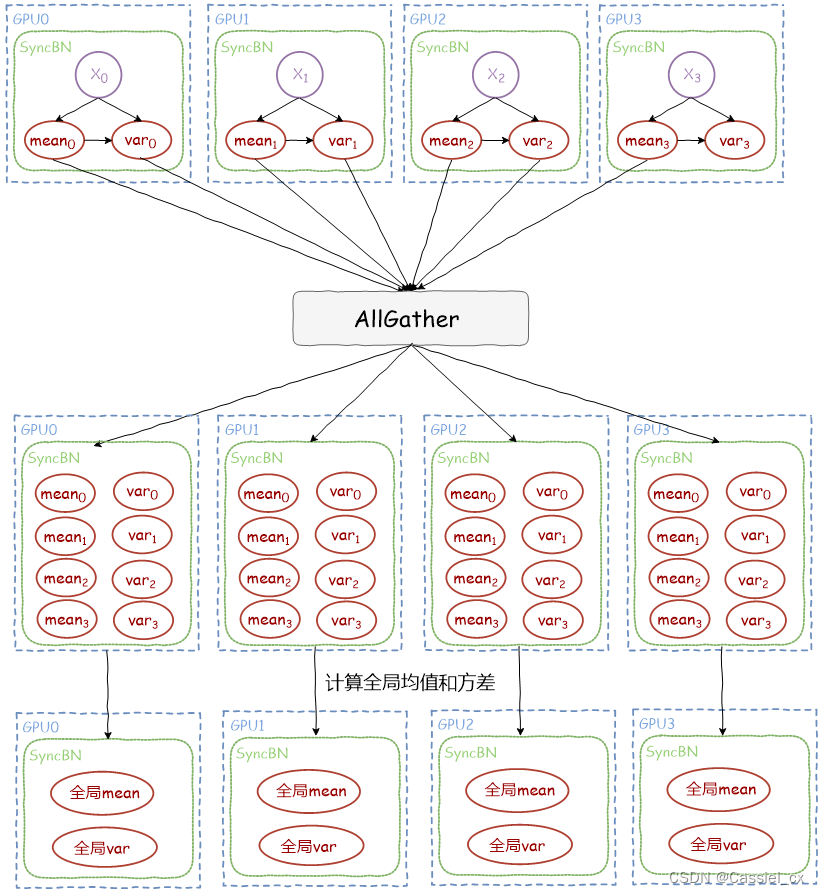
利用torch.distributed.all_gather函数收集各GPU上的均值和方差,得到全局的均值和方差,更新running_mean和running_var;
(3)标准化输入,该过程与BN类似。
SyncBN源码
import torch
from torch.autograd.function import Functionclass SyncBatchNorm(Function):@staticmethoddef forward(self, input, weight, bias, running_mean, running_var, eps, momentum, process_group, world_size):input = input.contiguous()size = input.numel() // input.size(1)if size == 1:raise ValueError('Expected more than 1 value per channel when training, got input size {}'.format(size))count = torch.Tensor([size]).to(input.device)# calculate mean/invstd for input.mean, invstd = torch.batch_norm_stats(input, eps)count_all = torch.empty(world_size, 1, dtype=count.dtype, device=count.device)mean_all = torch.empty(world_size, mean.size(0), dtype=mean.dtype, device=mean.device)invstd_all = torch.empty(world_size, invstd.size(0), dtype=invstd.dtype, device=invstd.device)count_l = list(count_all.unbind(0))mean_l = list(mean_all.unbind(0))invstd_l = list(invstd_all.unbind(0))# using all_gather instead of all reduce so we can calculate count/mean/var in one gocount_all_reduce = torch.distributed.all_gather(count_l, count, process_group, async_op=True)mean_all_reduce = torch.distributed.all_gather(mean_l, mean, process_group, async_op=True)invstd_all_reduce = torch.distributed.all_gather(invstd_l, invstd, process_group, async_op=True)# wait on the async communication to finishcount_all_reduce.wait()mean_all_reduce.wait()invstd_all_reduce.wait()# calculate global mean & invstdmean, invstd = torch.batch_norm_gather_stats_with_counts(input,mean_all,invstd_all,running_mean,running_var,momentum,eps,count_all.view(-1).long().tolist())self.save_for_backward(input, weight, mean, invstd, count_all)self.process_group = process_group# apply element-wise normalizationout = torch.batch_norm_elemt(input, weight, bias, mean, invstd, eps)return out@staticmethoddef backward(self, grad_output):grad_output = grad_output.contiguous()saved_input, weight, mean, invstd, count_tensor = self.saved_tensorsgrad_input = grad_weight = grad_bias = Noneprocess_group = self.process_group# calculate local stats as well as grad_weight / grad_biassum_dy, sum_dy_xmu, grad_weight, grad_bias = torch.batch_norm_backward_reduce(grad_output,saved_input,mean,invstd,weight,self.needs_input_grad[0],self.needs_input_grad[1],self.needs_input_grad[2])if self.needs_input_grad[0]:# synchronizing stats used to calculate input gradient.# TODO: move div_ into batch_norm_backward_elemt kernelsum_dy_all_reduce = torch.distributed.all_reduce(sum_dy, torch.distributed.ReduceOp.SUM, process_group, async_op=True)sum_dy_xmu_all_reduce = torch.distributed.all_reduce(sum_dy_xmu, torch.distributed.ReduceOp.SUM, process_group, async_op=True)# wait on the async communication to finishsum_dy_all_reduce.wait()sum_dy_xmu_all_reduce.wait()divisor = count_tensor.sum()mean_dy = sum_dy / divisormean_dy_xmu = sum_dy_xmu / divisor# backward pass for gradient calculationgrad_input = torch.batch_norm_backward_elemt(grad_output,saved_input,mean,invstd,weight,mean_dy,mean_dy_xmu)# synchronizing of grad_weight / grad_bias is not needed as distributed# training would handle all reduce.if weight is None or not self.needs_input_grad[1]:grad_weight = Noneif weight is None or not self.needs_input_grad[2]:grad_bias = Nonereturn grad_input, grad_weight, grad_bias, None, None, None, None, None, NoneSyncBN的使用
注意,SyncBN需要在DDP环境初始化后初始化,但是要在DDP模型之前完成初始化。
import torch
from torch import distributeddistributed.init_process_group(backend='nccl')
model = torch.nn.SyncBatchNorm.convert_sync_batchnorm(model)
model = torch.nn.parallel.DistributedDataParallel(model)@classmethod
def convert_sync_batchnorm(cls, module, process_group=None):module_output = moduleif isinstance(module, torch.nn.modules.batchnorm._BatchNorm):module_output = torch.nn.SyncBatchNorm(module.num_features,module.eps,module.momentum,module.affine,module.track_running_stats,process_group,)if module.affine:with torch.no_grad():module_output.weight = module.weightmodule_output.bias = module.biasmodule_output.running_mean = module.running_meanmodule_output.running_var = module.running_varmodule_output.num_batches_tracked = module.num_batches_trackedif hasattr(module, "qconfig"):module_output.qconfig = module.qconfigfor name, child in module.named_children():module_output.add_module(name, cls.convert_sync_batchnorm(child, process_group))del modulereturn module_output3 InstanceNorm
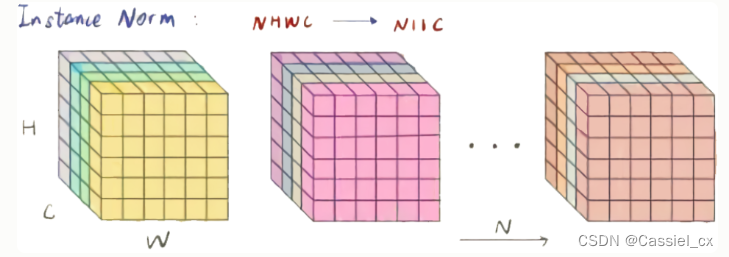
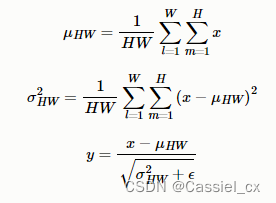
IN的原理
BN注重对batchsize数据归一化,但是在图像风格化任务中,生成的风格结果主要依赖于某个图像实例,所以对整个batchsize数据进行归一化不合适,因此提出了IN,只对HW维度进行归一化,IN保留了N、C的维度。计算过程如下图所示,1)沿着H、W维度,对输入张量求均值和方差;2)利用求得的均值和方差来标准化输入张量;3)加入可学习参数γ和β,对标准化后的数据做仿射变换,
IN的使用
torch.nn.InstanceNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)class InstanceNorm2d(_InstanceNorm):def _get_no_batch_dim(self):return 3def _check_input_dim(self, input):if input.dim() not in (3, 4):raise ValueError('expected 3D or 4D input (got {}D input)'.format(input.dim()))class _InstanceNorm(_NormBase):def __init__(self,num_features: int,eps: float = 1e-5,momentum: float = 0.1,affine: bool = False,track_running_stats: bool = False,device=None,dtype=None) -> None:factory_kwargs = {'device': device, 'dtype': dtype}super(_InstanceNorm, self).__init__(num_features, eps, momentum, affine, track_running_stats, **factory_kwargs)def _check_input_dim(self, input):raise NotImplementedErrordef _get_no_batch_dim(self):raise NotImplementedErrordef _handle_no_batch_input(self, input):return self._apply_instance_norm(input.unsqueeze(0)).squeeze(0)def _apply_instance_norm(self, input):return F.instance_norm(input, self.running_mean, self.running_var, self.weight, self.bias,self.training or not self.track_running_stats, self.momentum, self.eps)def _load_from_state_dict(self, state_dict, prefix, local_metadata, strict,missing_keys, unexpected_keys, error_msgs):version = local_metadata.get('version', None)# at version 1: removed running_mean and running_var when# track_running_stats=False (default)if version is None and not self.track_running_stats:running_stats_keys = []for name in ('running_mean', 'running_var'):key = prefix + nameif key in state_dict:running_stats_keys.append(key)if len(running_stats_keys) > 0:error_msgs.append('Unexpected running stats buffer(s) {names} for {klass} ''with track_running_stats=False. If state_dict is a ''checkpoint saved before 0.4.0, this may be expected ''because {klass} does not track running stats by default ''since 0.4.0. Please remove these keys from state_dict. If ''the running stats are actually needed, instead set ''track_running_stats=True in {klass} to enable them. See ''the documentation of {klass} for details.'.format(names=" and ".join('"{}"'.format(k) for k in running_stats_keys),klass=self.__class__.__name__))for key in running_stats_keys:state_dict.pop(key)super(_InstanceNorm, self)._load_from_state_dict(state_dict, prefix, local_metadata, strict,missing_keys, unexpected_keys, error_msgs)def forward(self, input: Tensor) -> Tensor:self._check_input_dim(input)if input.dim() == self._get_no_batch_dim():return self._handle_no_batch_input(input)return self._apply_instance_norm(input)IN的优点
IN适合于生成式对抗网络的相关任务,如风格迁移。图片生成的结果主要依赖于某个图像实例,对整个batchsize进行BN操作不适合风格迁移任务,在该任务中使用IN不仅可以加速模型收敛,并且可以保持每个图像实例之间的独立性,不受通道和batchsize的影响。
IN的缺点
如果要利用到特征图通道之间的相关性,不建议使用IN做归一化处理。
4 LayerNorm
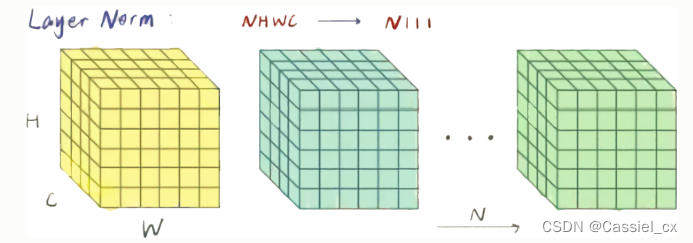
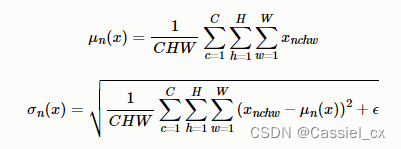
LN的原理
在NLP任务中,比如文本任务,不同样本的长度往往不一样,使用BN来标准化则不太合理。因此提出了LN,对CHW维度进行归一化。计算过程如下图所示,1)沿着C、H、W维度求输入张量的均值和方差;2)利用所求得的均值和方差标准化输入;3)加入可学习参数γ和β,对标准化后的数据做仿射变换,
LN的使用
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True)class LayerNorm(Module):__constants__ = ['normalized_shape', 'eps', 'elementwise_affine']normalized_shape: Tuple[int, ...]eps: floatelementwise_affine: booldef __init__(self, normalized_shape: _shape_t, eps: float = 1e-5, elementwise_affine: bool = True,device=None, dtype=None) -> None:factory_kwargs = {'device': device, 'dtype': dtype}super(LayerNorm, self).__init__()if isinstance(normalized_shape, numbers.Integral):# mypy error: incompatible types in assignmentnormalized_shape = (normalized_shape,) # type: ignore[assignment]self.normalized_shape = tuple(normalized_shape) # type: ignore[arg-type]self.eps = epsself.elementwise_affine = elementwise_affineif self.elementwise_affine:self.weight = Parameter(torch.empty(self.normalized_shape, **factory_kwargs))self.bias = Parameter(torch.empty(self.normalized_shape, **factory_kwargs))else:self.register_parameter('weight', None)self.register_parameter('bias', None)self.reset_parameters()def reset_parameters(self) -> None:if self.elementwise_affine:init.ones_(self.weight)init.zeros_(self.bias)def forward(self, input: Tensor) -> Tensor:return F.layer_norm(input, self.normalized_shape, self.weight, self.bias, self.eps)def extra_repr(self) -> str:return '{normalized_shape}, eps={eps}, ' \'elementwise_affine={elementwise_affine}'.format(**self.__dict__)LN的优点
LN不需要批量训练。在单条数据内部就能完成归一化操作,因此可以用于batchsize=1和RNN的训练中,效果比BN更优。不同的输入样本有不同的均值和方差,可以更快、更好地达到最优效果。LN不需要保存batchsize的均值和方差,节省了额外的存储空间。
LN的缺点
LN与batchsize无关,在小batchsize上效果可能会比BN好,但是在大batchsize的效果还是BN更好。
5 GroupNorm
GN的原理
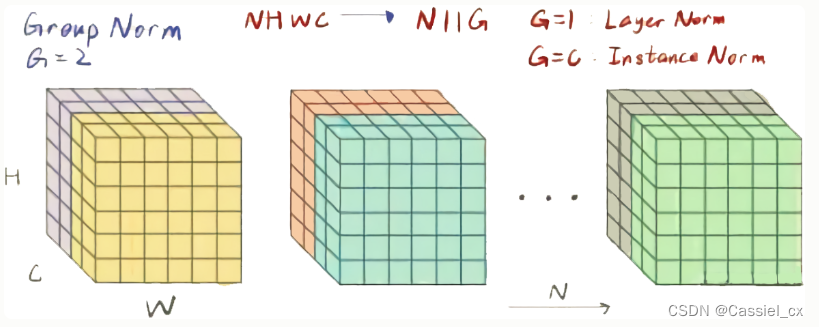
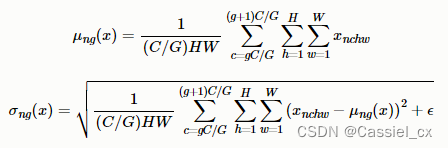
GN是为了解决BN对较小的batchsize效果差的问题,它将通道分成num_groupss组,每组包含channel/num_groups个通道,则特征图变为(N, G, C//G, H, W),然后计算每组(C//G, H, W)维度的均值和方差,这样就与batchsize无关。GN的极端情况就是LN和IN,分别对应G等于1和G等于C。GN的计算过程如下图所示,1)沿着C//G、H、W维度计算输入张量的均值和方差;2)利用所求得的均值和方差标准化输入;3)加入可学习参数γ和β,对标准化后的数据做仿射变换,
GN的使用
torch.nn.GroupNorm(num_groups, num_channels, eps=1e-05, affine=True, device=None, dtype=None)class GroupNorm(Module):__constants__ = ['num_groups', 'num_channels', 'eps', 'affine']num_groups: intnum_channels: inteps: floataffine: booldef __init__(self, num_groups: int, num_channels: int, eps: float = 1e-5, affine: bool = True,device=None, dtype=None) -> None:factory_kwargs = {'device': device, 'dtype': dtype}super(GroupNorm, self).__init__()if num_channels % num_groups != 0:raise ValueError('num_channels must be divisible by num_groups')self.num_groups = num_groupsself.num_channels = num_channelsself.eps = epsself.affine = affineif self.affine:self.weight = Parameter(torch.empty(num_channels, **factory_kwargs))self.bias = Parameter(torch.empty(num_channels, **factory_kwargs))else:self.register_parameter('weight', None)self.register_parameter('bias', None)self.reset_parameters()def reset_parameters(self) -> None:if self.affine:init.ones_(self.weight)init.zeros_(self.bias)def forward(self, input: Tensor) -> Tensor:return F.group_norm(input, self.num_groups, self.weight, self.bias, self.eps)def extra_repr(self) -> str:return '{num_groups}, {num_channels}, eps={eps}, ' \'affine={affine}'.format(**self.__dict__)GN的优点
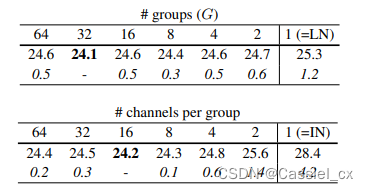
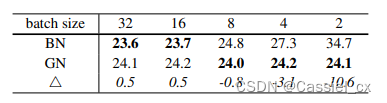
GN不依赖于batchsize,可以很好适用于RNN,这是GN的巨大优势。论文指出G为32或每个group的通道数为16时,效果最优;在batchsize小于16时,GN优于BN。
GN的缺点
在大batchsize时,效果不如BN。
6 总结
BN对小batchsize的效果不好;
IN作用在图像像素上,适用于风格化迁移;
LN主要对RNN作用明显;
GN将channel分组,然后再做归一化, 在batchsize<16的时候, 效果优于BN。
参考文章
【博客园】https://www.cnblogs.com/lxp-never/p/11566064.html
【知乎】https://zhuanlan.zhihu.com/p/395855181
【腾讯云】https://cloud.tencent.com/developer/article/2126838
相关文章:
BN、SyncBN、IN、LN、GN学习记录
1 BatchNormBN的原理BN是计算机视觉最常用的标准化方法,它沿着N、H、W维度对输入特征图求均值和方差,随后再利用均值和方差来归一化特征图。计算过程如下图所示,1)沿着通道维度计算其他维度的均值;2)沿着通…...

使用 Auto-scheduling 优化算子
本篇回答来源于 TVM 官方英文文档 Lianmin Zheng,Chengfan Jia。更多 TVM 中文文档可访问→https://tvm.hyper.ai/ 本教程将展示 TVM 的 Auto Scheduling 功能,如何在不编写自定义模板的情况下,找到最佳 schedule。 与基于模板的 AutoTVM 依…...
智能运维应用之道,告别企业数字化转型危机
面临的问题及挑战 数据中心发展历程 2000 年中国数据中心始建,至今已经历以下 3 大阶段。早期:离散型数据中心 IT 因以项目建设为导向,故缺乏规划且无专门运维管理体系,此外,开发建设完的项目均是独立运维维护&#…...

第七章 SQL错误信息 - SQL错误代码 -400 到 -500
文章目录第七章 SQL错误信息 - SQL错误代码 -400 到 -500SQL错误代码和消息表WinSock错误代码-10050到-11002第七章 SQL错误信息 - SQL错误代码 -400 到 -500 SQL错误代码和消息表 错误代码描述-400发生严重错误-401严重连接错误-402用户名/密码无效-405无法从通信设备读取-4…...

DDFN: Decoupled Dynamic Filter Networks解耦的动态卷积
一、论文信息 论文名称:Decoupled Dynamic Filter Networks 论文:https://thefoxofsky.github.io/files/ddf.pdf 代码:https://github.com/theFoxofSky/ddfnet 主页:https://thefoxofsky.github.io/project_pages/ddf 作者团…...

NISP认证报名条件是什么?考试内容是什么?
科学技术是社会发展的第一生产力,每个国家为了能够获得更高的国际地位,不断提升自己的科学技术,现代最为先进的技术就是信息通信,在军事、民生、医疗、教育、制造等等领域都起着重要的作用,我们的生活也因为信息技术而…...

利用redis实现缓存、发布订阅、分布式锁功能
Redis是一个内存键值存储数据库,通常用于缓存、会话管理、消息队列等场景。以下是一些常见的Redis使用场景:1.缓存:将常用的数据缓存在Redis中,以减少对数据库的访问次数,提高应用程序的性能。2.会话管理:使…...
SVN无法连接到服务器的各种问题原因及解决办法
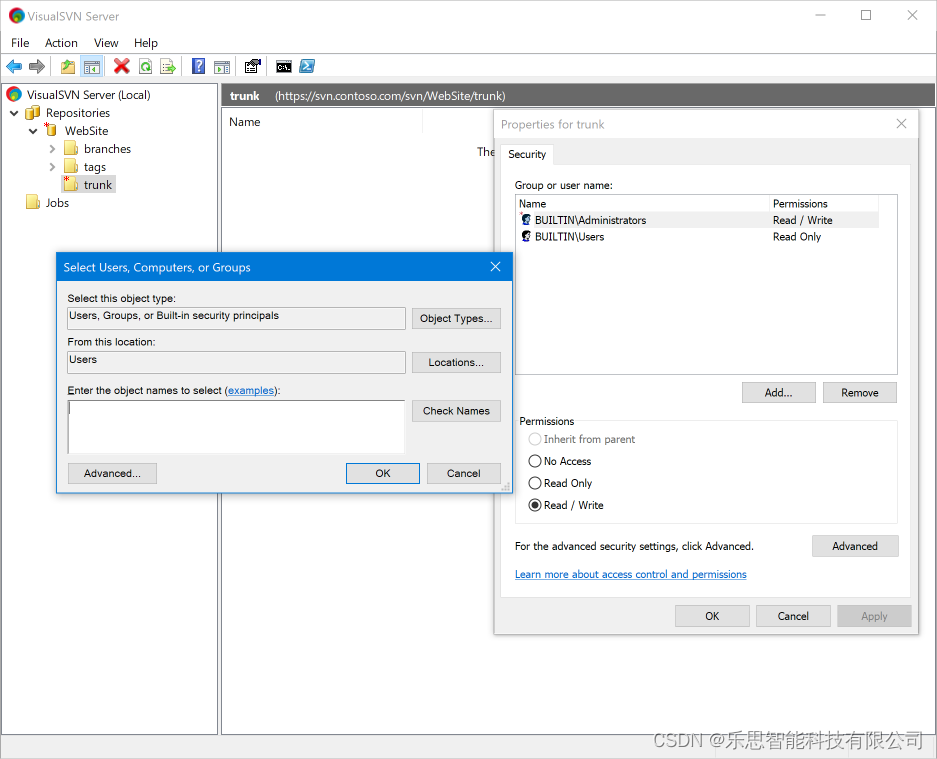
SVN专业使用教程详解 第一节 安装VisualSVN Server服务器 第一步 下载SVN服务器,需要链接的请私信。 点击下载的执行文档进行安装 选择组件 选择在部署 VisualSVN Server 时安装VisualSVN Server 和 Administration Tools 组件。 调整初始服务器配置 或者&…...

React 基本使用
目录 React 安装 React基本使用 React脚手架 脚手架使用React JSX基本使用 JSX列表渲染 JSX条件渲染 JSX模板精简 JSX样式控制 JSX综合案例 React 安装 npm i react react-domnpm init -y(生成基础目录文件) <!-- 引入js文件 --><sc…...
单例模式设计(面试题)
1、static修饰变量规则static修饰的静态成员属于 类而不是对象,所有的对象共享一份静态成员数据,所以不占用类的空间static修饰的成员,定义类的时候,必须分配空间static修饰的静态成员数据 必须类中定义 类外初始化静态成员变量可…...
机器学习:基于支持向量机(SVM)进行人脸识别预测
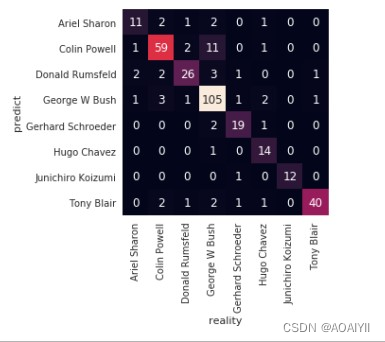
机器学习:基于支持向量机(SVM)进行人脸识别预测 文章目录机器学习:基于支持向量机(SVM)进行人脸识别预测一、实验目的二、实验原理三、实验环境四、实验内容五、实验步骤1.准备数据2.业务理解3.数据理解4.数…...

【服务器数据恢复】多块磁盘离线导致RAIDZ崩溃的数据恢复案例
服务器数据恢复环境: SUN ZFS系列某型号存储阵列; 40块磁盘组建的存储池(其中4块磁盘用作全局热备盘),池内划分出若干空间映射到服务器使用; 服务器使用Windows操作系统。 服务器故障: 服务器在…...

iconfont 图标如何在uniapp中的tabBar使用
注意: 小程序并不支持tabBar中 设置 iconfont 1. 材料准备 首先进入字体图标网址:iconfont-阿里巴巴矢量图标库;(如果你没有登入,记得登入一下) 把图标添加入购物车 添加到购物车之后-(右上角…...
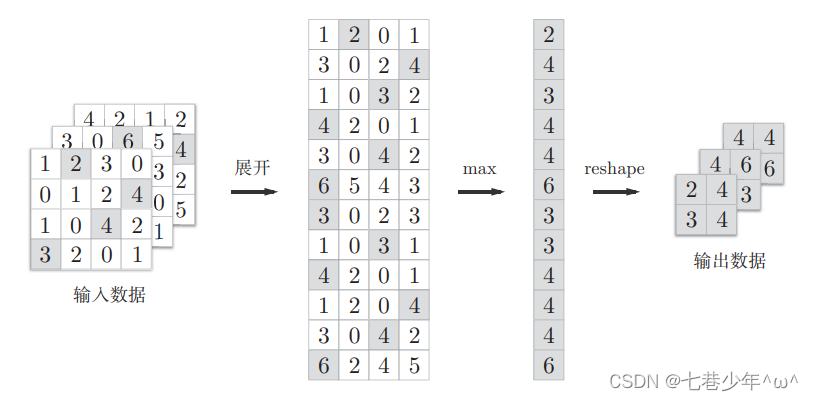
第六章.卷积神经网络(CNN)—卷积层(Convolution)池化层(Pooling)
第六章.卷积神经网络(CNN) 6.1 卷积层(Convolution)&池化层(Pooling) 1.整体结构 以5层神经网络的实现为例: 1).基于全连接层(Affine)的网络 全连接层:相邻层的所有神经元之间都有连接 2).常见的CNN的网络 3).全连接层存在的问题 数据的形状容易被…...
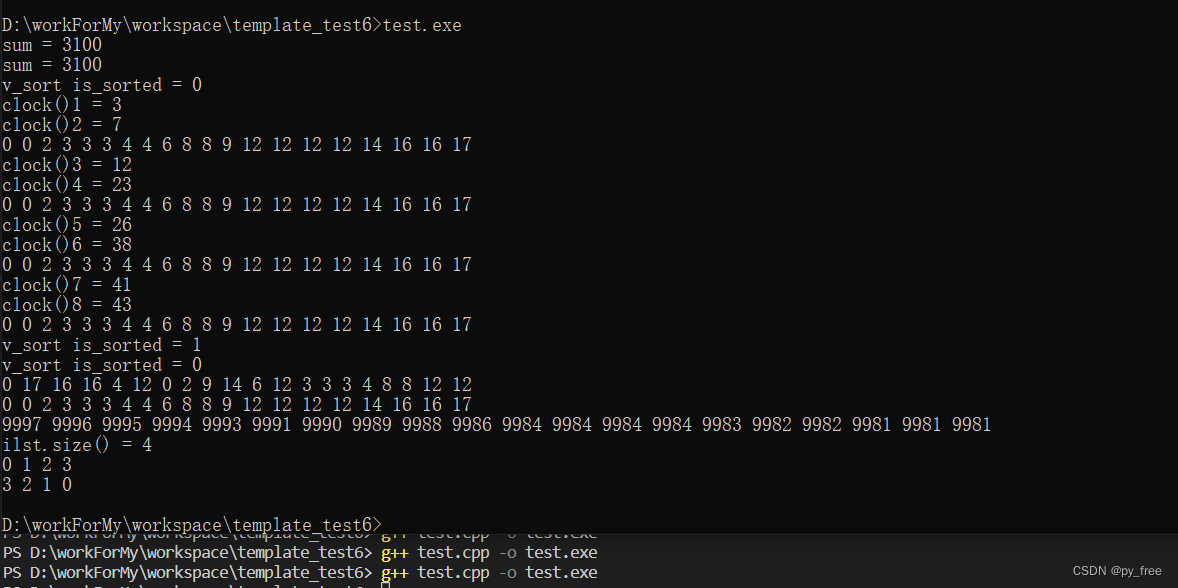
c/c++开发,无可避免的模板编程实践(篇六)
一、泛型算法 1.1 泛型算法概述 c标准库不仅包含数据结构(容器、容器适配器等),还有很多算法。数据结构可以帮助存放特定情况下需要保存的数据,而算法则会将数据结构中存储的数据进行变换。标准库没有给容器添加大量的功能函数&am…...
【Java】Spring核心与设计思想
文章目录Spring核心与设计思想1. Spring是什么1.1 什么是容器1.2 什么是IOC1.2.1 传统程序开发1.2.2 控制反转式程序开发1.2.3 对比总结规律1.3 理解Spring IOC1.4 DI概念说明Spring核心与设计思想 1. Spring是什么 我们通常所说的Spring指的是Spring Framework(S…...
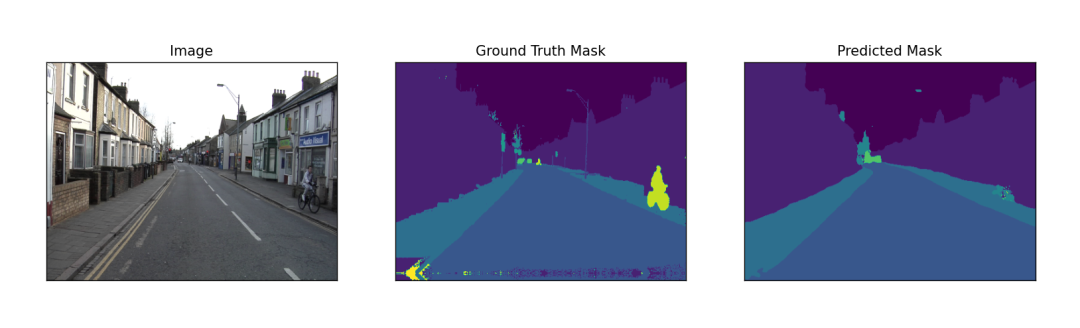
组合实现多类别分割(含实战代码)
来源:投稿 作者:AI浩 编辑:学姐 摘要 segmentation_models_pytorch是一款非常优秀的图像分割库,albumentations是一款非常优秀的图像增强库,这篇文章将这两款优秀结合起来实现多类别的图像分割算法。数据集选用CamVid…...

从红队视角看AWD攻击
AWD的权限维持 攻防兼备AWD模式是一种综合考核参赛团队攻击、防御技术能力、即时策略的比赛模式。在攻防模式中,参赛队伍分别防守同样配置的虚拟靶机,并在有限的博弈时间内,找到其他战队的薄弱环节进行攻击,同时要对自己的靶机环…...

龙腾万里,福至万家——“北京龙文化促进协会第九届龙抬头传承会”在京举办
2023年2月21日(农历2月初二)上午9:00点至下午13:00,由北京龙文化促进协会主办、传世经典(北京)文化发展有限公司承办、北京华夏龙文旅联盟协办的“北京龙文化促进协会第九届二月二龙抬头传承会”在北京市丰台区顺和国际大厦A口6层会议厅隆重召开。 传承会活动内容主…...
)
《软件方法》强化自测题-业务建模(4)
按照业务建模、需求、分析、设计工作流考察,答案不直接给出,可访问自测链接或扫二维码自测,做到全对才能知道答案。 知识点见《软件方法》(http://www.umlchina.com/book/softmeth.html)、 “软件需求设计方法学全程…...

JS手撕:DOM操作 浏览器API高频场景详解
在前端开发中,我们经常会遇到一些重复且基础的需求——比如解析URL参数、给大量元素绑定点击事件、实现图片懒加载等。这些功能看似简单,但写得不够严谨就容易出现bug(比如中文参数乱码、事件绑定冗余、滚动加载卡顿)。 今天就整理…...

PyTorch 2.6 镜像使用教程:开箱即用,快速开启你的AI之旅
PyTorch 2.6 镜像使用教程:开箱即用,快速开启你的AI之旅 1. 为什么选择PyTorch 2.6镜像 PyTorch作为当前最流行的深度学习框架之一,其2.6版本带来了多项性能优化和新特性。但对于初学者来说,环境配置往往是最头疼的问题——CUDA…...

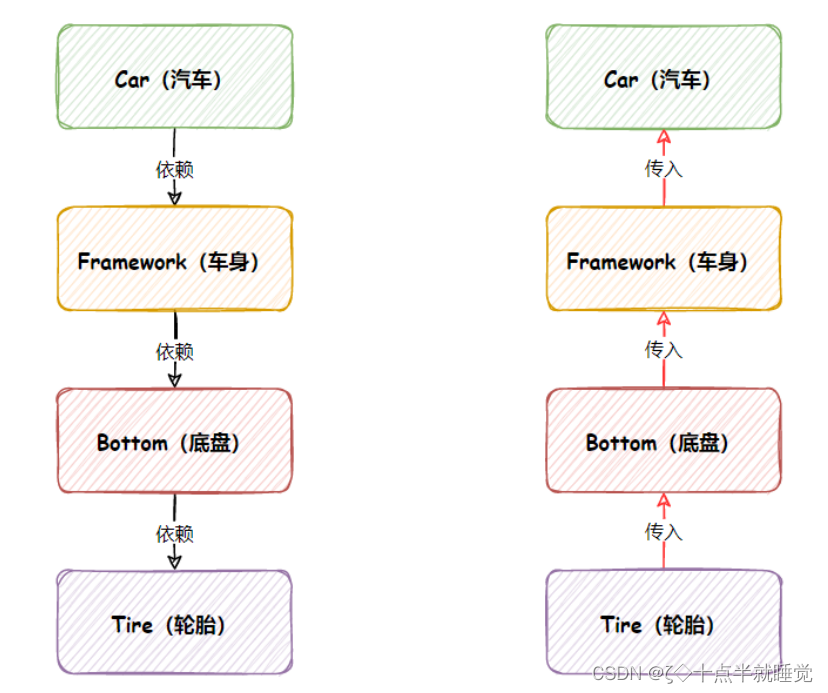
领域驱动设计实战:解密DDDSample中Cargo聚合根的黄金法则
领域驱动设计实战:解密DDDSample中Cargo聚合根的黄金法则 【免费下载链接】dddsample-core This is the new home of the original DDD Sample app (previously hosted at sf.net).. 项目地址: https://gitcode.com/gh_mirrors/dd/dddsample-core DDDSample…...

Intv_ai_mk11 C++高性能集成开发教程
Intv_ai_mk11 C高性能集成开发教程 1. 为什么需要高性能C集成方案 在AI应用开发中,性能往往是关键瓶颈。当你的C应用需要频繁调用AI模型API时,一个高效的集成方案能带来显著差异。想象一下,你正在开发一个实时视频分析系统,每秒…...

SDXL 1.0电影级绘图工坊效果展示:1152x896竖版在手机端全屏展示效果
SDXL 1.0电影级绘图工坊效果展示:1152x896竖版在手机端全屏展示效果 1. 惊艳效果开场:手机端全屏观影体验 想象一下,在手机上打开一张AI生成的图片,画面瞬间充满整个屏幕——没有黑边,没有压缩失真,就像在…...

3.30~4.5补题
牛客周赛Round 137 A.小苯的时钟显示牛客周赛Round 137 B.小苯的输入法牛客周赛Round 137 C.小苯的观景路线牛客周赛Round 137 D.小苯的序列涂色牛客周赛Round 137 E.小苯的凝聚区间SMU 2026 Spring 天梯赛6(补题)7-1 1-1 输出金字塔图案SMU 2…...

React Native Interactable终极指南:TouchesInside与静态交互对比详解
React Native Interactable终极指南:TouchesInside与静态交互对比详解 【免费下载链接】react-native-interactable Experimental implementation of high performance interactable views in React Native 项目地址: https://gitcode.com/gh_mirrors/re/react-na…...

OpenClaw自动化写作对比:千问3.5-35B-A3B-FP8与纯文本模型的产出差异
OpenClaw自动化写作对比:千问3.5-35B-A3B-FP8与纯文本模型的产出差异 1. 为什么需要对比不同模型的写作表现 上周我在用OpenClaw自动生成技术文档时,发现一个有趣的现象:同样的任务指令,交给不同的大模型处理,产出的…...

【2026 CVPR】Asking like Socrates: Socrates helps VLMs understand remote sensing images
RS-EoT (Remote Sensing Evidence-of-Thought) 研究旨在解决视觉语言模型(VLM)在处理遥感图像时的“虚假推理”问题 。 文章目录 核心问题 核心思想 核心方法 A. 数据合成:SocraticAgent Data Statistics B. 训练策略:两阶段渐进式强化学习 (RL) C. 训练策略 实验验证 主要…...

P6 v24.12 新功能实战:如何用‘基线预览’和‘取消链接’高效管理项目变更?
P6 v24.12 新功能实战:如何用‘基线预览’和‘取消链接’高效管理项目变更? 在复杂工程项目管理中,计划变更如同家常便饭。每次设计调整、资源变动或进度延误,都可能引发连锁反应。传统做法中,项目经理往往需要反复试…...