yolov8热力图可视化


安装pytorch_grad_cam
pip install grad-cam
自动化生成不同层的bash脚本
# 循环10次,将i的值从0到9
for i in $(seq 0 13)
doecho "Running iteration $i";python yolov8_heatmap.py $i;
done热力图生成python代码
import warnings
warnings.filterwarnings('ignore')
warnings.simplefilter('ignore')
import torch, yaml, cv2, os, shutil
import numpy as np
np.random.seed(0)
import sys
import matplotlib.pyplot as plt
from tqdm import trange
from PIL import Image
from ultralytics.nn.tasks import DetectionModel as Model
from ultralytics.yolo.utils.torch_utils import intersect_dicts
# from ultralytics.yolo.data.augment import LetterBox
from ultralytics.yolo.utils.ops import xywh2xyxy
from pytorch_grad_cam import GradCAMPlusPlus, GradCAM, XGradCAM
from pytorch_grad_cam.utils.image import show_cam_on_image
from pytorch_grad_cam.activations_and_gradients import ActivationsAndGradientsdef letterbox(im, new_shape=(640, 640), color=(114, 114, 114), auto=True, scaleFill=False, scaleup=True, stride=32):# Resize and pad image while meeting stride-multiple constraintsshape = im.shape[:2] # current shape [height, width]if isinstance(new_shape, int):new_shape = (new_shape, new_shape)# Scale ratio (new / old)r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])if not scaleup: # only scale down, do not scale up (for better val mAP)r = min(r, 1.0)# Compute paddingratio = r, r # width, height ratiosnew_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh paddingif auto: # minimum rectangledw, dh = np.mod(dw, stride), np.mod(dh, stride) # wh paddingelif scaleFill: # stretchdw, dh = 0.0, 0.0new_unpad = (new_shape[1], new_shape[0])ratio = new_shape[1] / shape[1], new_shape[0] / shape[0] # width, height ratiosdw /= 2 # divide padding into 2 sidesdh /= 2if shape[::-1] != new_unpad: # resizeim = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))left, right = int(round(dw - 0.1)), int(round(dw + 0.1))im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add borderreturn im, ratio, (dw, dh)class yolov8_heatmap:def __init__(self, weight, cfg, device, method, layer, backward_type, conf_threshold, ratio):device = torch.device(device)ckpt = torch.load(weight)model_names = ckpt['model'].namescsd = ckpt['model'].float().state_dict() # checkpoint state_dict as FP32model = Model(cfg, ch=3, nc=len(model_names)).to(device)csd = intersect_dicts(csd, model.state_dict(), exclude=['anchor']) # intersectmodel.load_state_dict(csd, strict=False) # loadmodel.eval()print(f'Transferred {len(csd)}/{len(model.state_dict())} items')target_layers = [eval(layer)]method = eval(method)colors = np.random.uniform(0, 255, size=(len(model_names), 3)).astype(np.int64)self.__dict__.update(locals())def post_process(self, result):logits_ = result[:, 4:]boxes_ = result[:, :4]sorted, indices = torch.sort(logits_.max(1)[0], descending=True)return torch.transpose(logits_[0], dim0=0, dim1=1)[indices[0]], torch.transpose(boxes_[0], dim0=0, dim1=1)[indices[0]], xywh2xyxy(torch.transpose(boxes_[0], dim0=0, dim1=1)[indices[0]]).cpu().detach().numpy()def draw_detections(self, box, color, name, img):xmin, ymin, xmax, ymax = list(map(int, list(box)))cv2.rectangle(img, (xmin, ymin), (xmax, ymax), tuple(int(x) for x in color), 2)cv2.putText(img, str(name), (xmin, ymin - 5), cv2.FONT_HERSHEY_SIMPLEX, 0.8, tuple(int(x) for x in color), 2, lineType=cv2.LINE_AA)return imgdef crop(self,box,img):xmin, ymin, xmax, ymax = list(map(int, list(box)))return img[ymin:ymax,xmin:xmax].copy()def __call__(self, img_path, save_path):# remove dir if existif os.path.exists(save_path):shutil.rmtree(save_path)# make dir if not existos.makedirs(save_path, exist_ok=True)# img processimage = cv2.imread(img_path)img,(wratio,hratio), (dw, dh) = letterbox(image)img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)img = np.float32(img) / 255.0image = cv2.cvtColor(image, cv2.COLOR_BGR2RGB)image = np.float32(image) / 255.0tensor = torch.from_numpy(np.transpose(img, axes=[2, 0, 1])).unsqueeze(0).to(self.device)# init ActivationsAndGradientsgrads = ActivationsAndGradients(self.model, self.target_layers, reshape_transform=None)# get ActivationsAndResultresult = grads(tensor)activations = grads.activations[0].cpu().detach().numpy()# postprocess to yolo outputpost_result, pre_post_boxes, post_boxes = self.post_process(result[0])for i in trange(int(post_result.size(0) * self.ratio)):if float(post_result[i].max()) < self.conf_threshold:breakself.model.zero_grad()# get max probability for this predictionif self.backward_type == 'class' or self.backward_type == 'all':score = post_result[i].max()score.backward(retain_graph=True)if self.backward_type == 'box' or self.backward_type == 'all':for j in range(4):score = pre_post_boxes[i, j]score.backward(retain_graph=True)# process heatmapif self.backward_type == 'class':gradients = grads.gradients[0]elif self.backward_type == 'box':gradients = grads.gradients[0] + grads.gradients[1] + grads.gradients[2] + grads.gradients[3]else:gradients = grads.gradients[0] + grads.gradients[1] + grads.gradients[2] + grads.gradients[3] + grads.gradients[4]b, k, u, v = gradients.size()weights = self.method.get_cam_weights(self.method, None, None, None, activations, gradients.detach().numpy())weights = weights.reshape((b, k, 1, 1))saliency_map = np.sum(weights * activations, axis=1)saliency_map = np.squeeze(np.maximum(saliency_map, 0))saliency_map = cv2.resize(saliency_map, (tensor.size(3), tensor.size(2)))saliency_map_min, saliency_map_max = saliency_map.min(), saliency_map.max()# 如果不生成图像 注释掉下面两行if (saliency_map_max - saliency_map_min) == 0:continuesaliency_map = (saliency_map - saliency_map_min) / (saliency_map_max - saliency_map_min)saliency_map = cv2.resize(saliency_map[int(dh):-int(dh),:], (image.shape[1],image.shape[0]))winv_ratio = 1.0 / wratiohinv_ratio = 1.0 / hratiodet_box_restored = [int((post_boxes[i][0] - (dw+0.1)) * winv_ratio),int((post_boxes[i][1] - (dh+0.1)) * hinv_ratio),int((post_boxes[i][2] - (dw-0.1)) * winv_ratio),int((post_boxes[i][3] - (dh-0.1)) * hinv_ratio)]det_box_restored = [int(coord) for coord in det_box_restored]# add heatmap and box to imagecam_image = show_cam_on_image(image.copy(), saliency_map, use_rgb=True)crop_cam_image = self.crop(det_box_restored,cam_image)crop_cam_image = Image.fromarray(crop_cam_image)crop_cam_image.save(f'{save_path}/{i}_crop.png')cam_image = self.draw_detections(det_box_restored, self.colors[int(post_result[i, :].argmax())], f'{self.model_names[int(post_result[i, :].argmax())]} {float(post_result[i].max()):.2f}', cam_image)cam_image = Image.fromarray(cam_image)cam_image.save(f'{save_path}/{i}.png')def get_params():params = {'weight': '../runs/detect/my-person73-small/weights/best.pt','cfg': 'models/small-yolov8.yaml','device': 'cuda:0','method': 'GradCAM', # GradCAMPlusPlus, GradCAM, XGradCAM'layer': f'model.model[{sys.argv[1]}]','backward_type': 'all', # class, box, all'conf_threshold': 0.6, # 0.6'ratio': 0.02 # 0.02-0.1}return paramsif __name__ == '__main__':model = yolov8_heatmap(**get_params())model(r'1.jpg', f'result/{sys.argv[1]}')相关文章:
yolov8热力图可视化
安装pytorch_grad_cam pip install grad-cam自动化生成不同层的bash脚本 # 循环10次,将i的值从0到9 for i in $(seq 0 13) doecho "Running iteration $i";python yolov8_heatmap.py $i; done热力图生成python代码 import warnings warnings.filterwarn…...

【SpringBoot】第一篇:redis使用
背景: 本文是教初学者如何正确使用和接入redis。 一、引入依赖 <!--redis--><dependency><groupId>org.springframework.boot</groupId><artifactId>spring-boot-starter-data-redis</artifactId></dependency><depen…...
Springboot profile多环境配置
1. 前言 profile用于多环境的激活和配置,用来切换生产,测试,本地等多套不通环境的配置。如果每次去更改配置就非常麻烦,profile就是用来切换多环境配置的。 2. 配置方法 三种方式。 2.1 多profile文件方式 在resource目录下新…...
进程与线程区别)
(1)进程与线程区别
1.什么是线程、进程 进程:操作系统资源分配的基本单位线程:处理器任务调度和执行的基本单位。 一个进程至少有一个线程,线程是进程的一部分,所以线程也被称为轻权进程或者轻量级进程。 2.并行与并发 一个基本的事实前提&#x…...
学习JAVA打卡第四十天
对象的字符串表示 在此类中我们讲过,所有的类都默认是java.lang包中object类的子类或间接子类。 Object类有一个public String toString()方法,一个对象通过调用该方法可以获得该对象的字符串表示。一个对象调用toString法(&…...

【跟小嘉学 Rust 编程】十四、关于 Cargo 和 Crates.io
系列文章目录 【跟小嘉学 Rust 编程】一、Rust 编程基础 【跟小嘉学 Rust 编程】二、Rust 包管理工具使用 【跟小嘉学 Rust 编程】三、Rust 的基本程序概念 【跟小嘉学 Rust 编程】四、理解 Rust 的所有权概念 【跟小嘉学 Rust 编程】五、使用结构体关联结构化数据 【跟小嘉学…...

防关联指纹浏览器:高效地管理你的Facebook账户
Facebook,作为全球最受欢迎社交平台的第一名已经成为我们日常和工作中不可或缺的一部分了。不管是用于日常分享、媒体营销、还是店铺运营,Facebook都占据着重要的位置。多个Facebook账户的优势非常明显,然而,当你需要同时管理他们…...
)
前端学习记录~2023.8.15~JavaScript重难点实例精讲~第7章 ES6(1)
第 7 章 ES6 前言7.1 let关键字和const关键字7.1.1 let关键字(1)let关键字的特性(2)使用let关键字的好处 7.1.2 const关键字(1)const关键字的特性 7.2 解构赋值7.2.1 数组的解构赋值(1ÿ…...

WebSocket详解以及应用
😜作 者:是江迪呀✒️本文关键词:websocket、网络、长连接、前端☀️每日 一言:任何一个你不喜欢而又离不开的地方,任何一种你不喜欢而又无法摆脱的生活,都是监狱! 一、前言 我们在…...

如何评估开源项目的活跃度和可持续性?
🌷🍁 博主猫头虎 带您 Go to New World.✨🍁 🦄 博客首页——猫头虎的博客🎐 🐳《面试题大全专栏》 文章图文并茂🦕生动形象🦖简单易学!欢迎大家来踩踩~🌺 &a…...

远程Linux/ubuntu服务器后台不间断运行py文件/sh脚本
通常我们在生产环境中运行一些项目时需要将程序不间断的运行在服务器上,并且将日志文件打印到某个文件中,直到程序运行结束,下面介绍了在Linux服务器上不间断运行py文件的方式,以及如何保存相应的日志信息。 对于 .py 文件&#x…...
记录一个诡异的bug
将对接oa跳转到会议转写的项目oa/meetingtranslate项目发布到天宫,结果跳转到successPage后报错 这一看就是successPage接口名没对上啊,查了一下代码,没问题啊。 小心起见,我就把successPage的方法请求方式从Post改为Get和POST都…...

Xamarin.Android中的Fragment
目录 1、Activity中使用Fragment2、Fragment与Activity通信3、Fragment与其他的Fragment通信 1、Activity中使用Fragment 一般而言,会在activity中添加一个加载fragment的方法。通过点击菜单的按钮,加载不同的fragment。其样子一般是这样的:…...
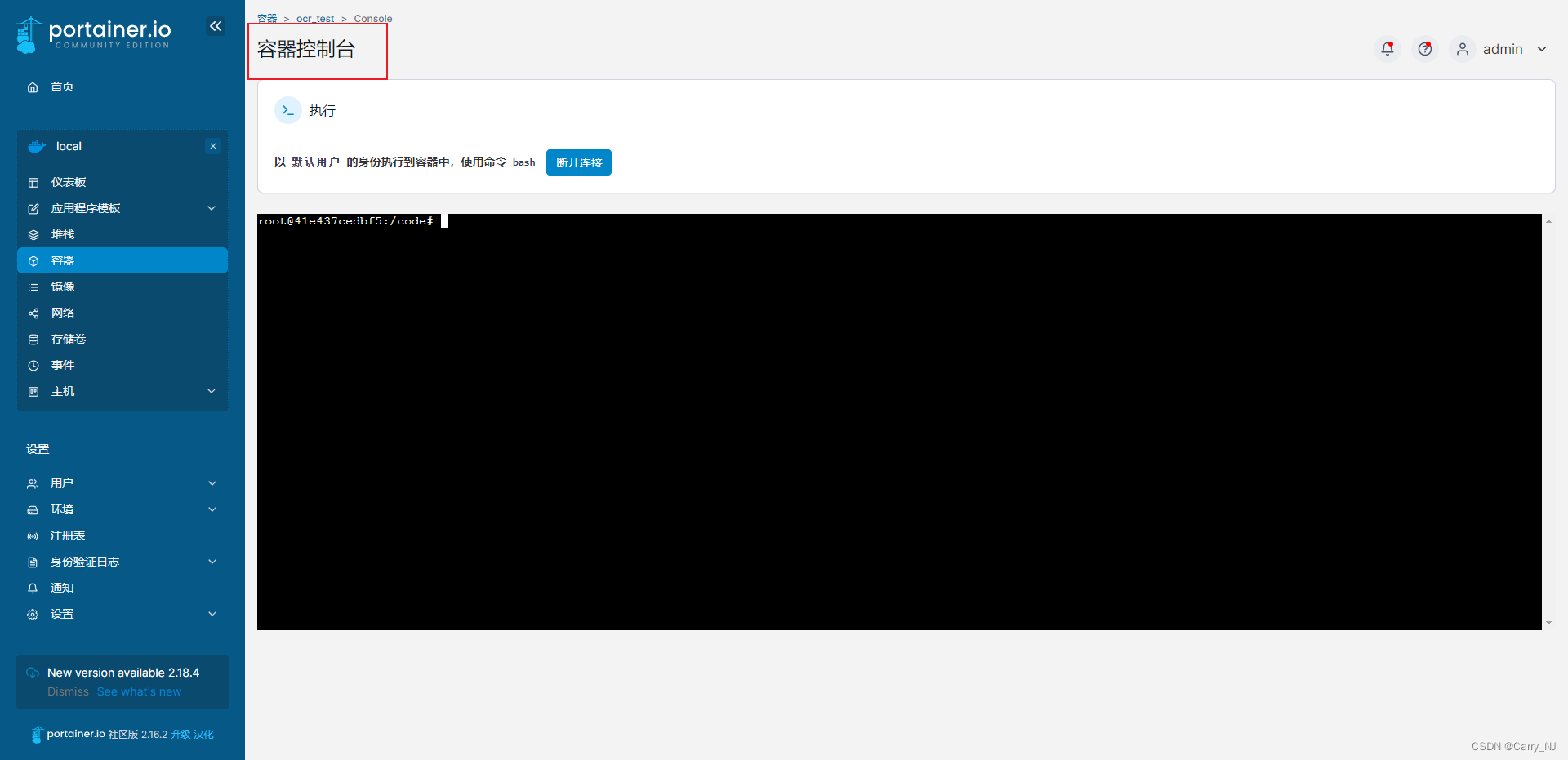
portainer初体验
官方文档 安装 docker 这里采用的的是国内汉化的一个镜像,版本号2.16.2。 地址 docker run -d --restartalways --name"portainer" -p 9000:9000 -v /var/run/docker.sock:/var/run/docker.sock 6053537/portainer-ce体验 访问9000端口。 尝试&#x…...
)
4G数传方案(合宙cat1模块)
一. 合宙Cat1简介 合宙 Air724 模组推出的低功耗,超小体积,高性能嵌入式 4G Cat1 核心版,标准的 2.54 排针、最小成本的进项 2G、4G Cat4 切换;主要功能如下: 实际测试工作环境为-35℃-75℃; 支持 5-12V 供电或者 3.7…...

ElasticSearch - 海量数据索引拆分的一些思考
文章目录 困难解决方案初始方案及存在的问题segment merge引入预排序 拆分方案设计考量点如何去除冗余数据按什么维度拆分,拆多少个最终的索引拆分模型演进历程整体迁移流程全量迁移流程流量回放比对验证异步转同步多索引联查优化效果 总结与思考参考 困难 索引数据…...

【SA8295P 源码分析】83 - SA8295P HQNX + Android 完整源代码下载方法介绍
【SA8295P 源码分析】83 - SA8295P HQNX + Android 完整源代码下载方法介绍 一、高通官网 Chipcode 下载步骤介绍1.1 高通Chipcode 下载步骤1.2 高通 ReleaseNote 下载方法二、高通 HQX 代码介绍2.1 完整的 HQX 代码结构:sa8295p-hqx-4-2-4-0_hlos_dev_qnx.tar.gz2.2 sa8295p-…...

【设计模式--原型模式(Prototype Pattern)
一、什么是原型模式 原型模式(Prototype Pattern)是一种创建型设计模式,它的主要目的是通过复制现有对象来创建新的对象,而无需显式地使用构造函数或工厂方法。这种模式允许我们创建一个可定制的原型对象,然后通过复制…...
初识 Redis
初识 Redis 1 认识NoSQL1.1 结构化与非结构化1.2 关联和非关联1.3 查询方式1.4. 事务1.5 总结 2 Redis 概述2.1 应用场景2.2 特性 3 Resis 全局命令4 Redis 基本数据类型4.1 String4.1.1 常用命令4.1.2 命令的时间复杂度4.1.3 使用场景 4.2 Hash4.2.1 常用命令4.2.2 命令的时间…...

php灵异事件,啥都没干数据变了?
这篇文章也可以在我的博客查看 搞WordPress,难免跟php打交道 然而这弱类型语言实在坑有点多 这不今儿又踩了个大坑直接时间-1😅 问题 话不多说直接上代码 <?php $items [1,2];foreach ($items as &$item) {/*empty loop*/} print_r($items)…...

REX-C410温控仪连接K型热电偶相关参数设置
1、同时按SET<键3秒 并按SET切换 修改后按 SET键3秒 保存 改SL1 参数为000 K型热电偶 改SL4 参数为0011 过程上限报警 2、按 SET键3秒 改AL1 为SV设定温度值这样修改后当实际温度 小于SV 设定温度值时OUT有输出,当温度达到设定值时ALM1有输出...
` 和 `get_to()` 优雅处理缺失字段)
从一次线上故障复盘:如何用 nlohmann::json 的 `value()` 和 `get_to()` 优雅处理缺失字段
从一次线上故障复盘:如何用 nlohmann::json 的 value() 和 get_to() 优雅处理缺失字段 上周五晚上10点,我们的算法服务平台突然收到大量错误告警。一个核心接口在解析上传的算法包时频繁报错,日志里满是[json.exception.type_error.302] type…...
)
Perplexity估值从3B美元缩水至1.8B?华尔街分析师闭门会议纪要首度流出(含5条未公开预警红线)
更多请点击: https://intelliparadigm.com 第一章:Perplexity估值缩水事件全景速览 2024年第三季度,AI搜索初创公司Perplexity在完成新一轮融资后,其内部估值从2023年底的10亿美元迅速回调至约7.5亿美元,引发全球科技…...

OpenWrt自动化神器:用luci-app-nettask插件,把物理按键和断网都变成触发器
OpenWrt自动化神器:用luci-app-nettask插件解锁硬件触发潜能 你是否曾想过,家里那台默默工作的路由器,除了提供Wi-Fi信号外,还能成为智能家居的中枢神经?当网络突然中断时,它能自动重连并发送通知ÿ…...

PX4开环控制避坑指南:为什么你的仿真无人机转圈总失败?从`setpoint_raw`话题到模式切换的深度解析
PX4开环控制避坑指南:为什么你的仿真无人机转圈总失败?从setpoint_raw话题到模式切换的深度解析 当你在Gazebo中启动PX4仿真环境,满怀期待地运行自己编写的开环控制代码,却发现无人机要么拒绝转圈,要么突然坠毁&#…...

Linux包管理核心:yum机制详解与实战配置指南
1. 项目概述:为什么你需要掌握yum?在Linux的世界里,尤其是以Red Hat、CentOS、Fedora为代表的发行版中,yum(Yellowdog Updater, Modified)是每一位系统管理员和开发者绕不开的核心工具。你可以把它想象成一…...

企业号码认证服务:实现座机、手机来电显示公司名称+品牌LOGO
在如今的商业环境下,一通没有身份标识的电话,想要敲开客户的大门已经变得越来越难。反诈意识的普及,让人们对陌生呼叫筑起了厚厚的防御墙。许多企业在开展客户回访、售后跟进或业务接洽时,频繁遭遇拒接、秒挂的窘境。投入了大笔的…...

食品制造 | 品控AI自动化方案主流厂商横评:2026企业级智能体选型与落地实测
2026年,全球食品制造业正处于从“数字化转型”向“智能化深耕”跨越的关键节点。随着国家市场监管总局“互联网AI监管”战略的全面深化,食品安全已不再仅仅依赖于周期性的线下抽检,而是转向了基于AI技术的全时段、全链路实时监控。 从校园食堂…...

JetBrains IDE试用期重置终极指南:如何永久免费使用专业开发工具
JetBrains IDE试用期重置终极指南:如何永久免费使用专业开发工具 【免费下载链接】ide-eval-resetter 项目地址: https://gitcode.com/gh_mirrors/id/ide-eval-resetter 还在为JetBrains IDE试用期到期而烦恼吗?每次30天试用结束后,那…...

告别Provider嵌套!用Naive UI的createDiscreteApi一键管理message、dialog、loadingBar
告别Provider嵌套!用Naive UI的createDiscreteApi一键管理全局反馈组件 在构建现代Vue 3应用时,全局反馈机制如消息提示(message)、对话框(dialog)、通知(notification)和加载条(loadingBar)是不可或缺的交互元素。传统方案需要在组件树中层层嵌套Provid…...