YOLOv5、v8改进:CrissCrossAttention注意力机制
目录
1.简介
2. yolov5添加方法:
2.1common.py构建CrissCrossAttention模块
2.2yolo.py中注册 CrissCrossAttention模块
2.3修改yaml文件。
1.简介
这是ICCV2019的用于语义分割的论文,可以说和CVPR2019的DANet遥相呼应。
和DANet一样,CCNet也是想建模像素之间的long range dependencies,来做更加丰富的contextual information,来补充特征图,以此来提升语义分割的性能。但是和DANet不一样,CCNet仅考虑空间分辨上的建模,不考虑建模通道之间的联系。作者提出的模块,criss-cross attention module,针对空间维度上的建模,对于空间位置的一个点u,仅考虑建模和u在同一行或者同一列的其他位置的像素之间的联系。相比DANet,能减少很多计算量,但是不足的是,对一个点的特征向量,尽管有同一行或者同一列的其他像素信息作为补充,对于语义分割任务,contextual information仍然是稀疏的(sparse),因为语义分割更在意一个像素和它周围的一些像素的关系。针对这个问题,作者提出了recurrent criss-cross attention module,来建模一个像素和全局所有像素的关系。方式是通过重复criss-cross attention module来实现的。这些module也是参数shared的。
同样是建模空间维度的pixel-wise contextual information,CCNet的计算量相较于self attention,可小太多了。一个CC module,要处理的是一个像素点和同一行、同一列一共(H+W-1)这么多的像素,那么应用在所有像素上,计算量就是O(HW(H+W-1))。回顾DANet的空间注意力分支(position attention module),每一个像素就要和(HW)个像素建模之间的联系,应用在所有相素,计算量就是O(HW*(H*W))。
通过递归的方式用CC module,可以对一个像素捕捉到全局的contextual information,提到了语义分割任务的效果。
个人看法,简单且有效的,就是极其优秀的方法,CCNet就属于这一类方法。

1.首先一个原图送进backbone,这个backbone是修改过的,把最后两个stage的stride改为1,同时应用空洞卷积来增大感受野。得到的特征图是原图的1/8.
2.然后经过1*1的卷积降维。得到H
3.H经过一个criss-cross attention module 得到H ′ 这个时候,H’中的每个位置都捕捉到了和u在同一行或者同一列的context information
4.H’经过一个相同结构、相同参数的cc module,得到了H’’。在H‘’中的每个位置,捕捉的是全局性的contextual information
5..最后经过一个分割层输出最后的预测结果。
之前改进增加了很多注意力机制的方法,包括比较常规的SE、CBAM等,本文加入CrissCrossAttention注意力机制,该注意力机制为应用在语义分割中的模块,用于可以让网络更加关注待检测目标,提高检测效果
基本原理:
语义分割的Criss-Cross网络(CCNet)的细节。我们首先介绍了CCNet的总体框架。然后,将介绍在水平和垂直方向捕获上下文信息的2D交叉注意力模块。为了获取密集的全局上下文信息,我们建议对交叉注意力模块采用循环操作。为了进一步改进RCCA,我们引入了判别损失函数来驱动RCCA学习类别一致性特征。最后,我们提出了同时利用时间和空间上下文信息的三维交叉注意模块。
2. yolov5添加方法:
2.1common.py构建CrissCrossAttention模块
import torch
import torch.nn as nn
import torch.nn.functional as F
from torch.nn import Softmaxdef INF(B,H,W):return -torch.diag(torch.tensor(float("inf")).repeat(H),0).unsqueeze(0).repeat(B*W,1,1)class CrissCrossAttention(nn.Module):""" Criss-Cross Attention Module"""def __init__(self, in_dim):super(CrissCrossAttention,self).__init__()self.query_conv = nn.Conv2d(in_channels=in_dim, out_channels=in_dim//8, kernel_size=1)self.key_conv = nn.Conv2d(in_channels=in_dim, out_channels=in_dim//8, kernel_size=1)self.value_conv = nn.Conv2d(in_channels=in_dim, out_channels=in_dim, kernel_size=1)self.softmax = Softmax(dim=3)self.INF = INFself.gamma = nn.Parameter(torch.zeros(1))def forward(self, x):m_batchsize, _, height, width = x.size()proj_query = self.query_conv(x)proj_query_H = proj_query.permute(0,3,1,2).contiguous().view(m_batchsize*width,-1,height).permute(0, 2, 1)proj_query_W = proj_query.permute(0,2,1,3).contiguous().view(m_batchsize*height,-1,width).permute(0, 2, 1)proj_key = self.key_conv(x)proj_key_H = proj_key.permute(0,3,1,2).contiguous().view(m_batchsize*width,-1,height)proj_key_W = proj_key.permute(0,2,1,3).contiguous().view(m_batchsize*height,-1,width)proj_value = self.value_conv(x)proj_value_H = proj_value.permute(0,3,1,2).contiguous().view(m_batchsize*width,-1,height)proj_value_W = proj_value.permute(0,2,1,3).contiguous().view(m_batchsize*height,-1,width)energy_H = (torch.bmm(proj_query_H, proj_key_H)+self.INF(m_batchsize, height, width)).view(m_batchsize,width,height,height).permute(0,2,1,3)energy_W = torch.bmm(proj_query_W, proj_key_W).view(m_batchsize,height,width,width)concate = self.softmax(torch.cat([energy_H, energy_W], 3))att_H = concate[:,:,:,0:height].permute(0,2,1,3).contiguous().view(m_batchsize*width,height,height)#print(concate)#print(att_H) att_W = concate[:,:,:,height:height+width].contiguous().view(m_batchsize*height,width,width)out_H = torch.bmm(proj_value_H, att_H.permute(0, 2, 1)).view(m_batchsize,width,-1,height).permute(0,2,3,1)out_W = torch.bmm(proj_value_W, att_W.permute(0, 2, 1)).view(m_batchsize,height,-1,width).permute(0,2,1,3)#print(out_H.size(),out_W.size())return self.gamma*(out_H + out_W) + x2.2yolo.py中注册 CrissCrossAttention模块
elif m is CrissCrossAttention:c1, c2 = ch[f], args[0]if c2 != no:c2 = make_divisible(c2 * gw, 8)args = [c1, *args[1:]]
2.3修改yaml文件。
# YOLOAir 🚀, GPL-3.0 license# Parameters
nc: 80 # number of classes
depth_multiple: 0.33 # model depth multiple
width_multiple: 0.50 # layer channel multiple
anchors:- [10,13, 16,30, 33,23] # P3/8- [30,61, 62,45, 59,119] # P4/16- [116,90, 156,198, 373,326] # P5/32# YOLOAir v6.0 backbone
backbone:# [from, number, module, args][[-1, 1, Conv, [64, 6, 2, 2]], # 0-P1/2[-1, 1, Conv, [128, 3, 2]], # 1-P2/4[-1, 3, C3, [128]],[-1, 1, Conv, [256, 3, 2]], # 3-P3/8[-1, 6, C3, [256]],[-1, 1, Conv, [512, 3, 2]], # 5-P4/16[-1, 9, C3, [512]],[-1, 1, Conv, [1024, 3, 2]], # 7-P5/32[-1, 3, C3, [1024]],[-1, 1, SPPF, [1024, 5]], # 9]# YOLOAir v6.0 head
head:[[-1, 1, Conv, [512, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 6], 1, Concat, [1]], # cat backbone P4[-1, 3, C3, [512, False]], # 13[-1, 1, Conv, [256, 1, 1]],[-1, 1, nn.Upsample, [None, 2, 'nearest']],[[-1, 4], 1, Concat, [1]], # cat backbone P3[-1, 3, C3, [256, False]], # 17 (P3/8-small)[-1, 1, Conv, [256, 3, 2]],[[-1, 14], 1, Concat, [1]], # cat head P4[-1, 3, C3, [512, False]], # 20 (P4/16-medium)[-1, 1, Conv, [512, 3, 2]],[[-1, 10], 1, Concat, [1]], # cat head P5[-1, 3, C3, [1024, False]], # 23 (P5/32-large)[-1, 1, CrissCrossAttention, [1024]], #修改[[17, 20, 24], 1, Detect, [nc, anchors]], # Detect(P3, P4, P5)]YOLOv8和v5的改法是一致的
有什么问题可以评论区私聊
相关文章:
YOLOv5、v8改进:CrissCrossAttention注意力机制
目录 1.简介 2. yolov5添加方法: 2.1common.py构建CrissCrossAttention模块 2.2yolo.py中注册 CrissCrossAttention模块 2.3修改yaml文件。 1.简介 这是ICCV2019的用于语义分割的论文,可以说和CVPR2019的DANet遥相呼应。 和DANet一样,…...
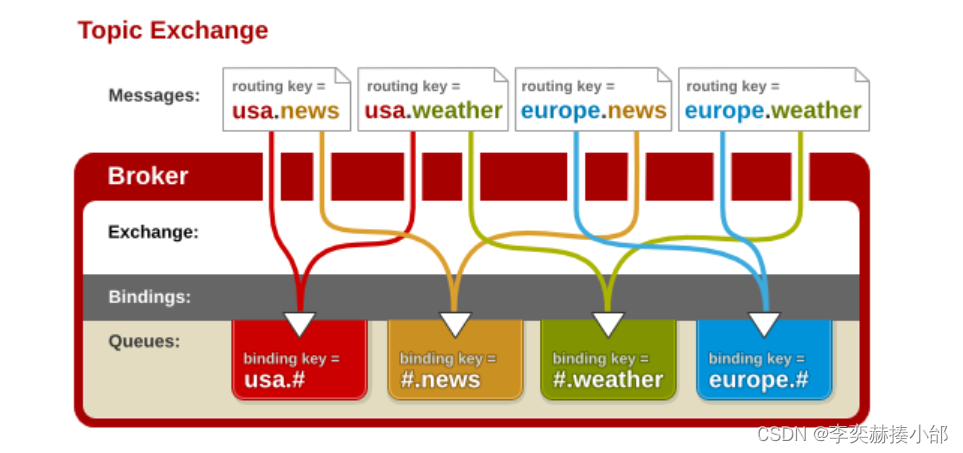
RabbitMQ特性介绍和使用案例
❤ 作者主页:李奕赫揍小邰的博客 ❀ 个人介绍:大家好,我是李奕赫!( ̄▽ ̄)~* 🍊 记得点赞、收藏、评论⭐️⭐️⭐️ 📣 认真学习!!!🎉🎉 文章目录 RabbitMQ特性…...
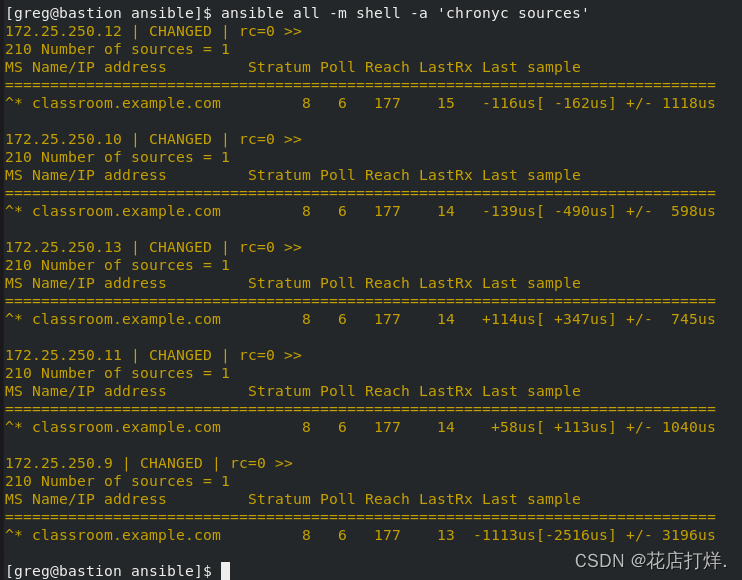
Ansible 使用 RHEL 系统角色
安装 RHEL 系统角色软件包,并创建符合以下条件的 playbook /home/greg/ansible/timesync.yml 在所有受管节点上运行 使用 timesync 角色 配置该角色,以使用当前有效的 NTP 提供商 配置该角色,以使用时间服务器 172.25.254.254 配置该角色&am…...

重新认识Android中的线程
线程的几种创建方式 new Thread:可复写Thread#run方法。也可以传递Runnable对象,更加灵活。缺点:缺乏统一管理,可能无限制新建线程,相互之间竞争,及可能占用过多系统的资源导致死机或oom。 new Thread(new…...

前端(十五)——GitHub开源一个react封装的图片预览组件
👵博主:小猫娃来啦 👵文章核心:GitHub开源一个react封装的图片预览组件 文章目录 组件开源代码下载地址运行效果展示实现思路使用思路和api实现的功能数据和入口部分代码展示 组件开源代码下载地址 Gitee:点此跳转下载…...

DELL Power Edge R740 安装 OracleLinux-R7-U9-Server
一、准备好 OracleLinux-R7-U9-Server-x86_64-dvd 安装介子: 二、通过 iDRAC挂dvd 安装介子 三、在 iDRAC 开机控制选择虚拟 CD/DCD/ISO 电源控制选择 复位系统(热启动) 四、进入安装阶段 五、配置时区 六、配置磁盘 七、删除之前的旧分区 …...
深入了解OpenStack:创建定制化QCOW2格式镜像的完全指南
OpenStack 创建自定义的QCOW2格式镜像 前言 建议虚机网络配置为 NAT 或 桥接,因为未来 KVM虚机 需要借助 虚机 的外网能力进行联网安装软件包 虚机在启动前,必须在 VMware Workstation 上为其开启虚拟化引擎 虚拟化 Intel VT-x/EPT 或 AMD-V 安装kvm …...
【Java 中级】一文精通 Spring MVC - 数据格式化器(六)
👉博主介绍: 博主从事应用安全和大数据领域,有8年研发经验,5年面试官经验,Java技术专家,WEB架构师,阿里云专家博主,华为云云享专家,51CTO 专家博主 ⛪️ 个人社区&#x…...
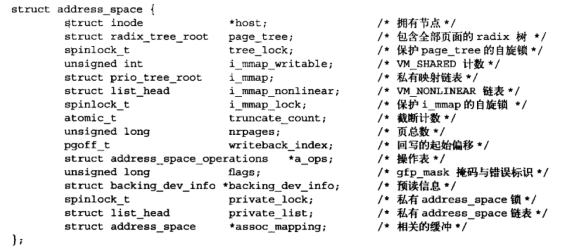
Linux内核学习(十二)—— 页高速缓存和页回写(基于Linux 2.6内核)
目录 一、缓存手段 二、Linux 页高速缓存 三、flusher 线程 Linux 内核实现了一个被叫做页高速缓存(page cache)的磁盘缓存,它主要用来减少对磁盘的 I/O 操作。它是通过把磁盘中的数据缓存到内存中,把对磁盘的访问变为对物理内…...
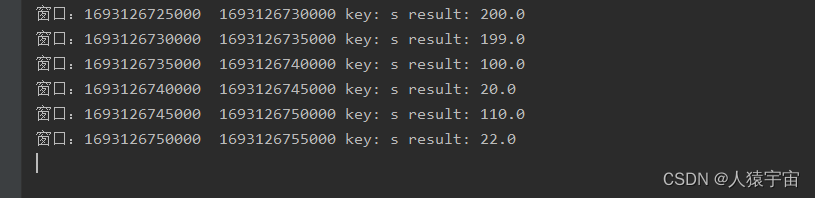
大数据-玩转数据-Flink窗口函数
一、Flink窗口函数 前面指定了窗口的分配器, 接着我们需要来指定如何计算, 这事由window function来负责. 一旦窗口关闭, window function 去计算处理窗口中的每个元素. window function 可以是ReduceFunction,AggregateFunction,or ProcessWindowFunction中的任意一种. Reduc…...
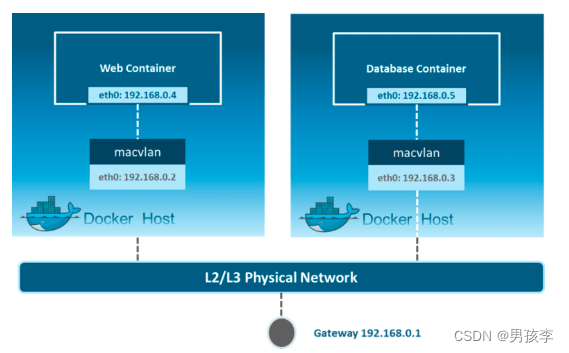
Docker网络-探索容器网络如何相互通信
当今世界,企业热衷于容器化,这需要强大的网络技能来正确配置容器架构,因此引入了 Docker Networking 的概念。Docker 是一种容器化平台,允许您在独立、轻量级的容器中运行应用程序和服务。Docker 提供了一套强大的网络功能&#x…...
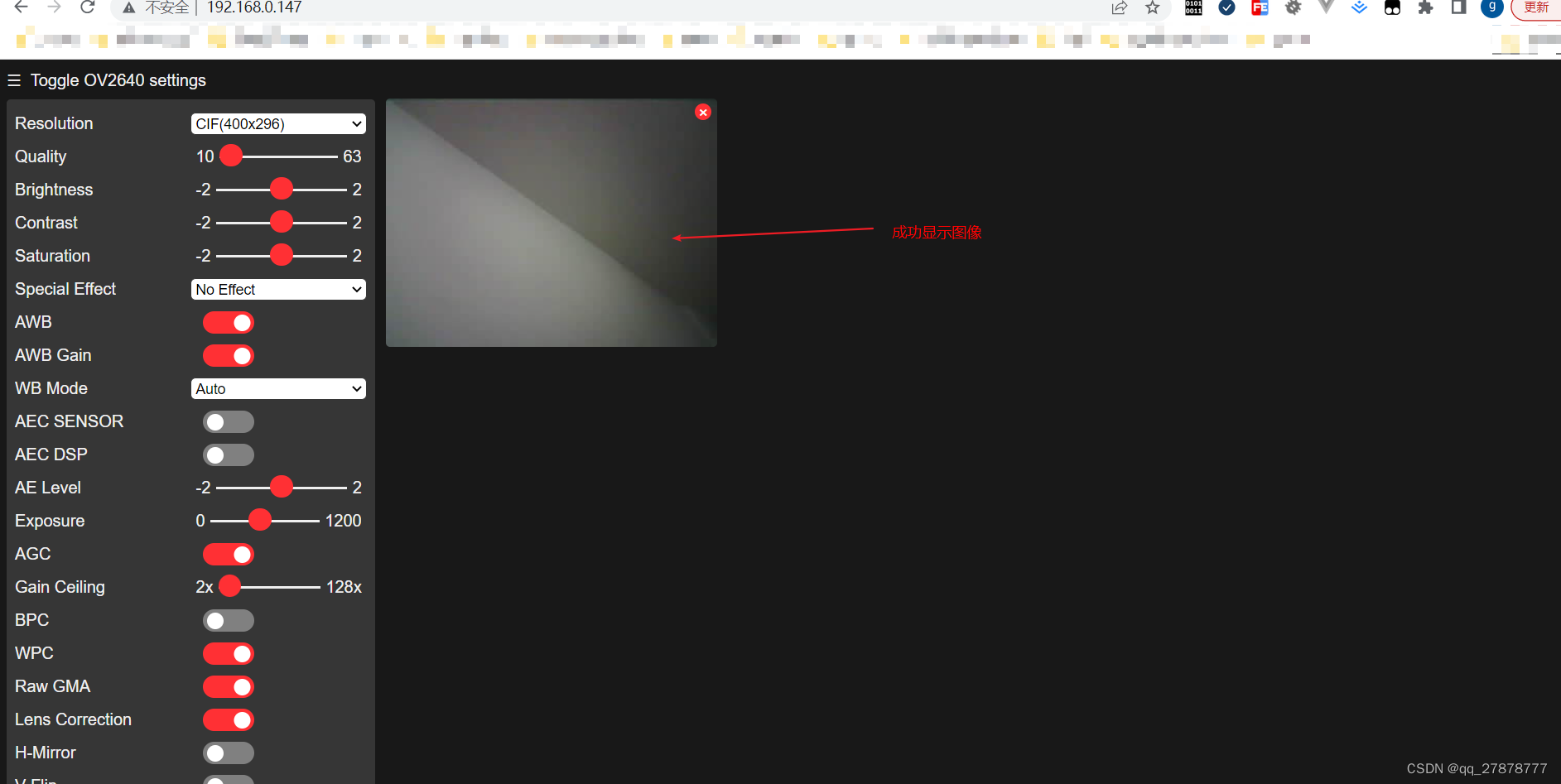
ESP32-CAM模块Arduino环境搭建测试
ESP32-CAM模块Arduino环境搭建测试 一.ESP32OV2640摄像头模块CameraWebServer视频查看 二.测试ESP32-CAM(后续称cam模块)代码是否上传执行成功测试 const int led0 12; const int led1 13;void setup() {// put your setup code here, to run once:pinMode(led0, OUTPUT);pin…...
webassembly001 webassembly简述
WebAssembly 官方地址:https://webassembly.org/相关历史 https://en.wikipedia.org/wiki/WebAssembly https://brendaneich.com/2015/06/from-asm-js-to-webassembly/WebAssembly(缩写为Wasm)是一种基于堆栈的虚拟机的二进制指令格式。Wasm 被设计为编…...

vue 使用C-Lodop打印小票
先从官网下载js文件 https://www.lodop.net/LodopDemo.html 打开安装程序,一直下一步既可,我这边已经安装过就不演示了。 // 引入 import { getLodop } from /utils/CLodopfuncs.js;// 使用 let LODOP getLodop()let Count LODOP.GET_PRINTER_COUNT…...

【C++进阶(二)】STL大法--vector的深度剖析以及模拟实现
💓博主CSDN主页:杭电码农-NEO💓 ⏩专栏分类:C从入门到精通⏪ 🚚代码仓库:NEO的学习日记🚚 🌹关注我🫵带你学习C 🔝🔝 vector 1. 前言2. 熟悉vector的接口函数2.1 vec…...

1. import pandas as pd 导入库
【目录】 文章目录 1. import pandas as pd 导入库1. pandas库的概念2. 导入pandas库2.1 常规导入2.2 别名导入 3. 别名的作用4. 课堂练习 【正文】 1. import pandas as pd 导入库 【学习时间】 10分钟 1. pandas库的概念 pandas:熊猫panda的复数, …...
DMK5框选变量之后不显示其他位置的此变量高亮
使用软件MDK5.3.8版本 如下在2的位置选择之后,其他同样的变量没有高亮,因为1的原因折叠了; 展开折叠之后就可以了...

0061__Appium
Appium Documentation - Appium Documentation APP自动化测试(3)-Appium Inspector介绍_六天测试工程师的博客-CSDN博客 https://github.com/appium/appium-inspector https://github.com/appium/appium-desktop https://github.com/appium/appium...

【DEVOPS】需求跟踪管理全面落地
0. 目录 1. 现状/背景2. 需求管理存在的问题3. 改进思路/措施4. 所谓"禅道尚未普及/铺开"5. 最后6. 相关 1. 现状/背景 近期又被领导问到"如何对项目过程中的需求进行量化和跟踪管理"。这真是一个狗皮膏药似的问题,反反复复地,隔一…...

算法修炼Day57|647. 回文子串 ● 516.最长回文子序列
LeetCode:647. 回文子串 647. 回文子串 - 力扣(LeetCode) 1.思路 暴力思路见对应代码… 动规解法:画图推导动规公式,当前状态由左侧和左下角推出,所以首层应该采用倒序的方式,内部采用正序的方式。 2.…...

淘宝商品详情 API 实现标题 / SKU / 主图批量采集
item_get_pro-获得淘宝商品详情高级版请求示例-- 请求示例 url 默认请求参数已经URL编码处理 curl -i "https://api-服务器.cn/taobao/item_get_pro/?key<您自己的apiKey>&secret<您自己的apiSecret>&num_iid678121631641"响应示例"num_ii…...

新手避坑指南:ICC LAB2 Design Planning 从加载设计到写出DEF的完整流程复盘
ICC LAB2 Design Planning全流程深度解析:从数据加载到DEF输出的实战避坑指南 当你第一次打开ICC工具面对LAB2的Design Planning任务时,是否感觉像被扔进了一个满是按钮的控制室?每个命令似乎都重要,但又不清楚它们如何串联成完整…...

初创公司如何利用Taotoken快速构建AI产品原型
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初创公司如何利用Taotoken快速构建AI产品原型 对于资源有限的初创团队而言,验证产品想法、快速推出原型是生存和发展的…...
)
【紧急更新】Google官方刚推送的Veo 2 v2.3.1补丁深度解析:新增胶片扫描模拟、物理光晕建模与导演模式(Director Mode)
更多请点击: https://intelliparadigm.com 第一章:Google Veo 2 v2.3.1补丁核心特性概览 Google Veo 2 v2.3.1 补丁是面向视频生成模型推理优化与安全增强的关键更新,聚焦于低延迟部署、多模态对齐稳定性及合规性强化。该版本并非架构重构&a…...

ARM CoreSight DAP-Lite调试架构与双协议切换技术
1. ARM CoreSight DAP-Lite技术架构解析作为ARM调试体系的核心组件,DAP-Lite(Debug Access Port Lite)是嵌入式系统开发中连接调试工具与片上资源的桥梁。我在实际芯片调试中发现,这个仅约2mm面积的IP模块,却能实现传统…...

离线AI教育工具开发实战:模型轻量化、边缘计算与五大应用场景
1. 项目概述:当AI导师走进离线课堂“每个学生都值得拥有一位AI导师”——这个想法听起来很美好,但在全球范围内,一个残酷的现实是:稳定、高速的网络连接并非理所当然。在许多乡村学校、资源匮乏的地区,甚至在城市里信号…...

风机技术演进与主动冷却系统优化实践
1. 风机技术演进与主动空气冷却系统优化作为一名在热管理领域工作多年的工程师,我见证了风机技术从简单的散热部件发展为精密的热管理系统的全过程。现代电子设备功率密度不断提升,从智能手机到数据中心服务器,散热设计已成为产品成败的关键因…...

知识图谱与智能体如何革新小说创作:graphify-novel项目深度解析
1. 项目概述:用知识图谱为你的小说创作装上“第二大脑”如果你是一位小说创作者,无论是网文作者、传统文学写作者,还是游戏叙事设计师,你一定经历过这样的痛苦时刻:写到第30章,突然想不起某个配角在第5章出…...

利用GPU指纹技术进行位置验证
大家读完觉得有帮助记得关注和点赞!!!摘要对GPU芯片进行强有力的监管,对于防范先进AI模型被未经授权开发和滥用至关重要。目前的芯片位置监控方法,依赖于存储在芯片内部的加密密钥所支持的“基于ping的协议”。然而&am…...

ksail:本地Kubernetes开发环境一键搭建与云原生实践
1. 项目概述:当Kubernetes遇上本地开发如果你是一名后端或云原生方向的开发者,大概率经历过这样的场景:为了调试一个微服务,你需要在本地启动一整套依赖——数据库、消息队列、缓存,可能还有另外两三个兄弟服务。你手忙…...