SE5 - BM1684 人工智能边缘开发板入门指南 -- 模型转换、交叉编译、yolov5、目标追踪
介绍
我们属于SoC模式,即我们在x86主机上基于tpu-nntc和libsophon完成模型的编译量化与程序的交叉编译,部署时将编译好的程序拷贝至SoC平台(1684开发板/SE微服务器/SM模组)中执行。
注:以下都是在Ubuntu20.04系统上操作的,当然Ubuntu18和22也是可以的,因为我们主要是用的官方 docker 环境进行配置。
准备工作
安装docker
首先安装docker
# 更新一下库
sudo apt-get update
sudo apt-gefat upgrade
# 安装 docker
sudo apt-get install docker.io
# docker命令免root权限执行
# 创建docker用户组,若已有docker组会报错,没关系可忽略
sudo groupadd docker
# 将当前用户加入docker组
sudo gpasswd -a ${USER} docker
# 重启docker服务
sudo service docker restart
# 切换当前会话到新group或重新登录重启X会话
newgrp docker
我已经装docker了,这一步没有测试,若有问题请问百度。
下载SDK
在算能官网上,资料下载里下载相关sdk:https://developer.sophgo.com/site/index/material/all/all.html
基础工具包包括:
- tpu-nntc 负责对第三方深度学习框架下训练得到的神经网络模型进行离线编译和优化,生成最终运行时需要的BModel。目前支持Caffe、Darknet、MXNet、ONNX、PyTorch、PaddlePaddle、TensorFlow等。
- libsophon 提供BMCV、BMRuntime、BMLib等库,用来驱动VPP、TPU等硬件,完成图像处理、张量运算、模型推理等操作,供用户进行深度学习应用开发。
- sophon-mw 封装了BM-OpenCV、BM-FFmpeg等库,用来驱动VPU、JPU等硬件,支持RTSP流、GB28181流的解析,视频图像编解码加速等,供用户进行深度学习应用开发。
- sophon-sail 提供了支持Python/C++的高级接口,是对BMRuntime、BMCV、BMDecoder、BMLib等底层库接口的封装,供用户进行深度学习应用开发。
可以下载这个SDK

这里面包含了models里的所有代码,当然里面很多包是用不到的。
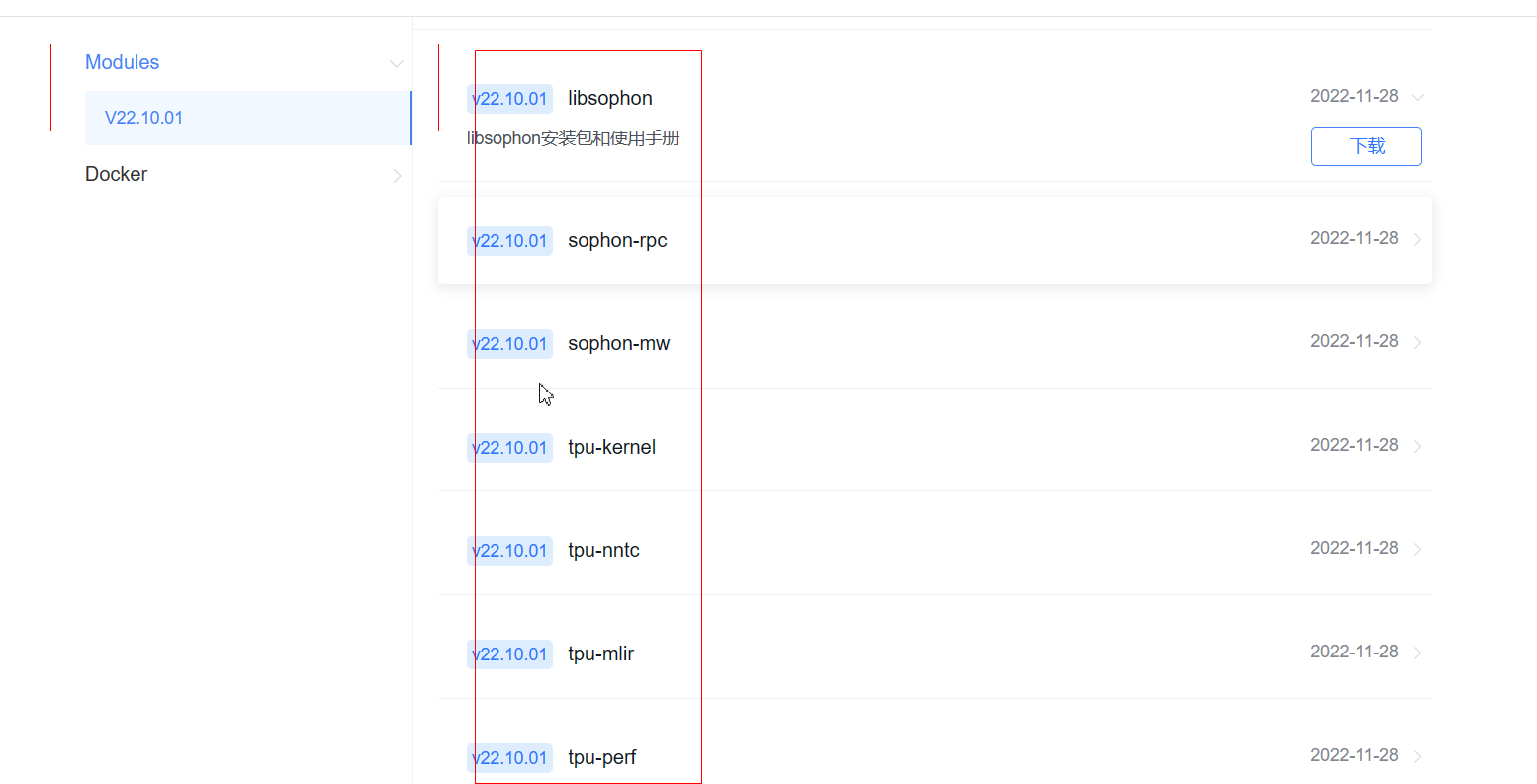
也可以只下载我们需要的sdk
主要是这几个:
tpu-nntc
libsophon
sophon-mw
sophon-demo
sophon-img
sophon-sail
sophon-demo
分别wget 到本地就行,
# 先建个存放的路径
mkdir fugui
# 分别wget 到本地就行
wget https://sophon-file.sophon.cn/sophon-prod-s3/drive/22/11/28/10/libsophon_20221027_214818.zip https://sophon-file.sophon.cn/sophon-prod-s3/drive/22/11/28/11/sophon-mw_20221027_183429.zip https://sophon-file.sophon.cn/sophon-prod-s3/drive/22/11/28/15/sophon-demo_20221027_181652.zip https://sophon-file.sophon.cn/sophon-prod-s3/drive/22/11/28/15/sophon-img_20221027_215835.zip https://sophon-file.sophon.cn/sophon-prod-s3/drive/22/11/28/15/sophon-sail_20221026_200216.zip https://sophon-file.sophon.cn/sophon-prod-s3/drive/22/11/28/15/sophon-demo_20221027_181652.zip
配置环境
装上解压缩工具
sudo apt-get install unzip
先把这几个压缩文件解压了
unzip \*.zip
创建docker容器:
#如果当前系统没有对应的镜像,会自动从docker hub上下载;此处将tpu-nntc的上一级目录映射到docker内的/workspace目录;这里用了8001到8001端口的映射(使用ufw可视化工具会用到端口号)。如果端口已被占用,请根据实际情况更换为其他未占用的端口。
:~/fugui# docker run -v $PWD/:/workspace -it sophgo/tpuc_dev:latest
进入 tpu-nntc,解压缩包
root@39d67fa4c7bb:/workspace/fugui/tpu-nntc_20221028_200521# tar -zxvf tpu-nntc_v3.1.3-242ef2f9-221028.tar.gz
进入tpu-nntc_v3.1.3-242ef2f9-221028 运行一下命令初始化软件环境
source scripts/envsetup.sh
在下载tensorflow时比较慢,我们都是用pytorch,直接ctrl c跳过,不装他了。
yolov5
这里就不演示官方模型了,直接用我们自己训练的模型进行量化推理。
注意:这里必须用yolov5 v6.1版本
如何训练就不说了,参考:这篇文章
最好使用yolov5s训练,然后对训练后的模型进行转换。比如我训练的是安全帽检测,现在生成了best.pt这个权重文件,为了好区分我改名为anquanmao.pt
将他放在了yolov5的根目录下,然后修改了models文件下的yolo.py中的forward函数。将return x if self.training else (torch.cat(z, 1), x) 修改为:
return x if self.training else x
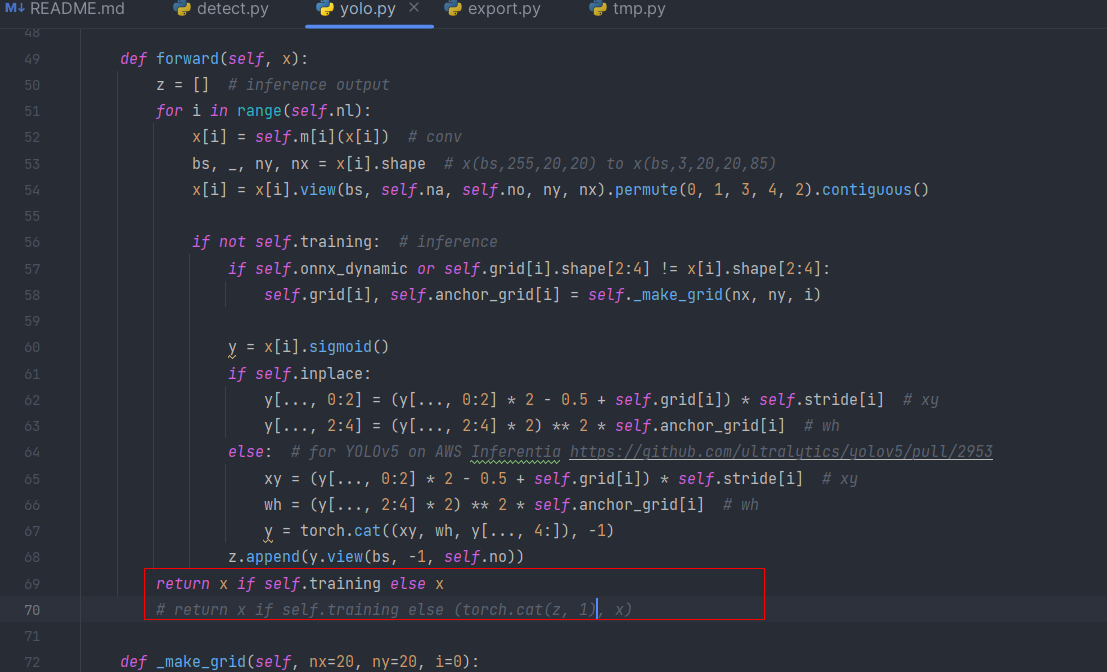
然后运行
python export.py --weight anquanmao.pt --include torchscript
这样生成了 anquanmao.torchscript 文件
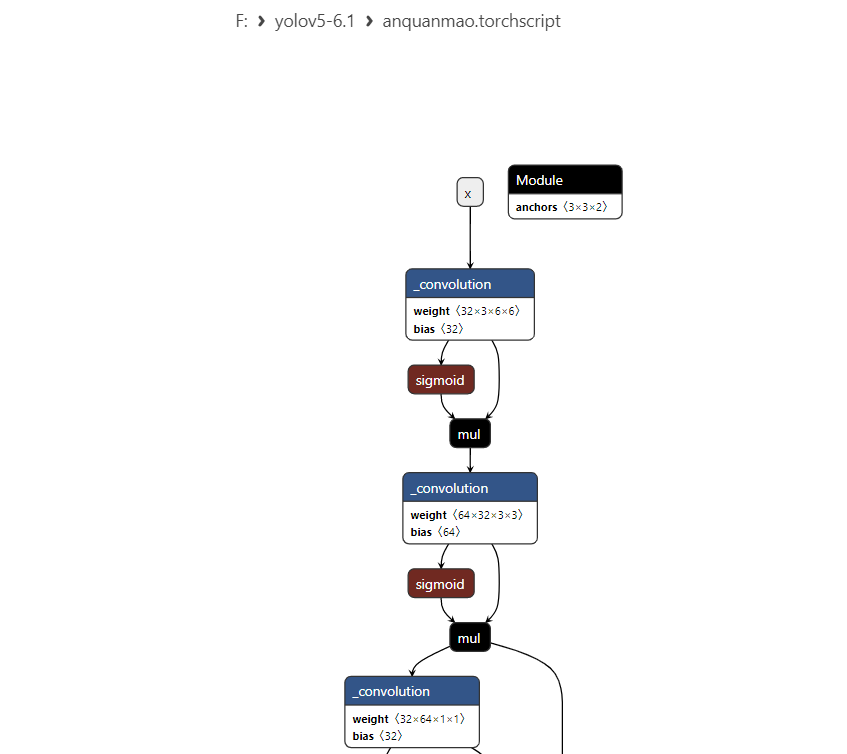
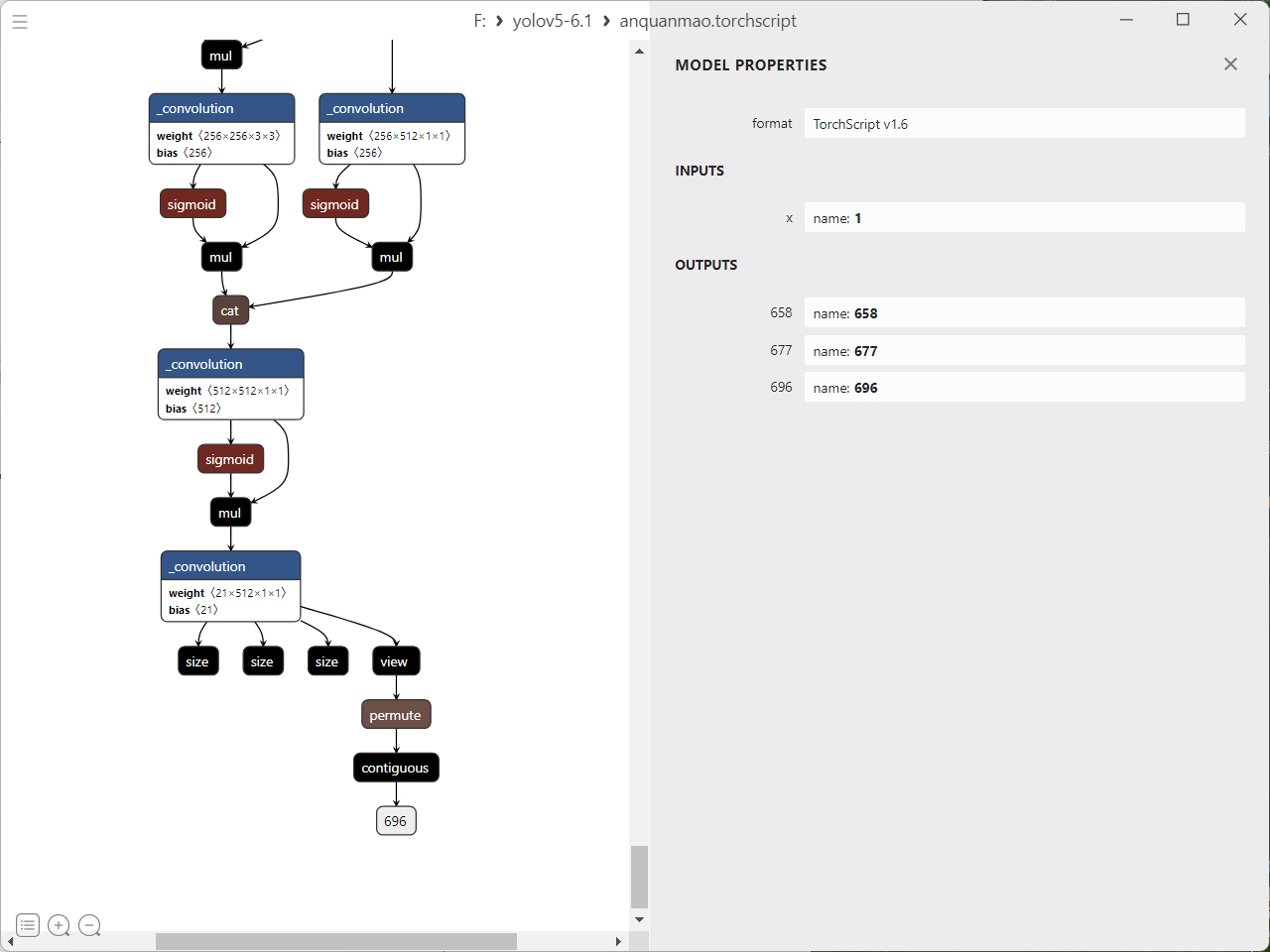
打开这个权重文件看看是不是和我的一样,只要是yolov5 6.1就肯定一样。
修改 anquanmao.torchscript 为 anquanmao.torchscript.pt (就是在最后加个.pt)
然后将这个文件拷贝到你的x86服务器里,路径为:
/root/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/data
然后找些你训练的图片,也就是安全帽,200张左右就行
同样上传到那个文件夹里
然后就可以进行模型转换了
# 先备份一下
root@39d67fa4c7bb:/workspace/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/scripts# cp 2_2_gen_int8bmodel.sh 3_2_gen_int8bmodel.sh
vi cp 2_2_gen_int8bmodel.sh
然后修改里面内容,200太多了,转换起来太慢了,50就够了

修改model_info.sh
root@39d67fa4c7bb:/workspace/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/scripts# vi model_info.sh
echo "start fp32bmodel transform, platform: ${platform} ......"root_dir=$(cd `dirname $BASH_SOURCE[0]`/../ && pwd)
build_dir=$root_dir/build
# 将这里修改为我们刚才存放的.torchscript.pt文件地址
src_model_file=${root_dir}/data/anquanmao.1_3output.torchscript.pt
src_model_name=`basename ${src_model_file}`
# 这里也修改下吧 yolov5s ——> anquanmao
dst_model_prefix="anquanmao"
dst_model_postfix="coco_v6.1_3output"
fp32model_dir="${root_dir}/data/models/${platform}/fp32model"
int8model_dir="${root_dir}/data/models/${platform}/int8model"
lmdb_src_dir="${root_dir}/data/images"
# 这里修改为我们上传的图片地址
image_src_dir="${root_dir}/data/anquanmao"
# lmdb_src_dir="${build_dir}/coco2017val/coco/images/"
#lmdb_dst_dir="${build_dir}/lmdb/"
img_size=${2:-640}
batch_size=${3:-1}
iteration=${4:-2}
img_width=640
img_height=640
运行转换命令前需要加上权限,否则不能执行
root@39d67fa4c7bb:/workspace/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/scripts# sudo chmod 777 *
然后执行转int8bmodel模型,转FP32也一样
root@39d67fa4c7bb:/workspace/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/scripts# ./ 2_2_gen_int8bmodel.sh
性能不好的机器会非常慢,等待完成即可
编译yolov5 c++程序
/workspace/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv/build#
cd cpp/deepsort_bmcv
mkdir build && cd build
# 请根据实际情况修改-DSDK的路径,需使用绝对路径
cmake -DTARGET_ARCH=soc -DSDK=/workspace/soc-sdk ..
make
复制到开发板
scp ../yolov5_bmcv.soc linaro@192.168.17.153:/data/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv
开发板运行
linaro@bm1684:/data/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv$ ./yolov5_bmcv_drawr.soc --input=rtsp://admin:sangfor@123@192.168.17.253 --bmodel=BM1684/yolov5s_v6.1_3output_int8_1b.bmodel
目标追踪
注:所有模型转换都是在docker环境中的
先进入docker
这里我们是要在docker环境里编译的,所以先进入docker
:~/tpu-nntc# docker run -v $PWD/:/workspace -it sophgo/tpuc_dev:latest
初始化环境
root@2bb02a2e27d5:/workspace/tpu-nntc# source ./scripts/envsetup.sh
docker里安装编译器
root@2bb02a2e27d5:/workspace/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv/build# sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu libeigen3-dev
本C++例程依赖Eigen,您需要在编译c++程序的机器上运行如下命令安装:
sudo apt install libeigen3-dev
先下载相关文件,主要是追踪的测试视频,测试图片,目标追踪的权重,目标检测的权重
# 安装unzip,若已安装请跳过
sudo apt install unzip
chmod -R +x scripts/
./scripts/download.sh
然后编译c++代码
/workspace/sophon-demo/sample/DeepSORT/cpp/deepsort_bmcv/build#
cd cpp/deepsort_bmcv
mkdir build && cd build
# 请根据实际情况修改-DSDK的路径,需使用绝对路径。
cmake -DTARGET_ARCH=soc -DSDK=/workspace/soc-sdk ..
make
这时会生成deepsort_bmcv.soc文件,复制到盒子里
:/workspace/sophon-demo/sample/DeepSORT/cpp/deepsort_bmcv# scp -r deepsort_bmcv.soc linaro@192.168.17.125:/data/yolo/sophon-demo/sample/DeepSORT/cpp
测试视频
./deepsort_bmcv.soc --input=rtsp://admin:sangfor@123@192.168.17.253 --bmodel_detector=../../BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor=../../BM1684/extractor_fp32_1b.bmodel --dev_id=0
运行相关代码,这个是检测图片的
cd python
python3 deepsort_opencv.py --input ../datasets/mot15_trainset/ADL-Rundle-6/img1 --bmodel_detector ../models/BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor ../models/BM1684/extractor_fp32_1b.bmodel --dev_id=0
对视频追踪
python3 deepsort_opencv.py --input ../datasets/test_car_person_1080P.mp4 --bmodel_detector ../models/BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor ../models/BM1684/extractor_fp32_1b.bmodel --dev_id=0
对本地摄像头视频追踪
python3 deepsort_opencv.py --input rtsp://admin:sangfor@123@192.168.17.253 --bmodel_detector ../models/BM1684/yolov5s_v6.1_3output_int8_1b.bmodel --bmodel_extractor ../models/BM1684/extractor_fp32_1b.bmodel --dev_id=0
人体姿态估计
python3 python/openpose_opencv.py --input rtsp://admin:sangfor@123@192.168.17.253 --bmodel models/BM1684/pose_coco_fp32_1b.bmodel --dev_id 0
生成的文件会放在sample/YOLOv5/data/models/BM1684/int8model/anquanmao_batch1里
:~/fugui/sophon-demo_20221027_181652/sophon-demo_v0.1.0_b909566_20221027/sample/YOLOv5/data/models/BM1684/int8model/anquanmao_batch1# ls
compilation.bmodel input_ref_data.dat io_info.dat output_ref_data.dat
然后将转换好的模型推送到开发板
scp compilation.bmodel linaro@{开发板ip地址}:/data/{你的yolov5存放路径}
开发板环境配置
搭建 libsophon 环境
cd libsophon_<date>_<hash>
# 安装依赖库,只需要执行一次
sudo apt install dkms libncurses5
sudo dpkg -i sophon-*.deb
# 在终端执行如下命令,或者log out再log in当前用户后即可使用bm-smi等命令
source /etc/profile
python3 yolov5_new_1.py --input rtsp://admin:1111111a@192.168.16.223 --bmodel yolov5s_v6.1_3output_fp32_1b.bmodel
c++编译环境
安装libsophon
进入sophon-img_20221027_215835这个路径
解压里面的tar包
:~/fugui/sophon-img_20221027_215835# tar -zxvf libsophon_soc_0.4.2_aarch64.tar.gz
将相关库目录和头文件目录拷贝到soc-sdk文件夹中
:~/fugui/sophon-img_20221027_215835/libsophon_soc_0.4.2_aarch64/opt/sophon/libsophon-0.4.2# sudo cp -rf include lib ~/fugui/soc-sdk
安装sophon-opencv 和sophon-ffmpeg
先进入sophon-mw,解压sophon-mw-soc_0.4.0_aarch64.tar.gz这个tar包
:~/fugui/sophon-mw_20221027_183429# tar -zxvf sophon-mw-soc_0.4.0_aarch64.tar.gz
复制相关文件到soc-sdk
:~/fugui/sophon-mw_20221027_183429/sophon-mw-soc_0.4.0_aarch64/opt/sophon# cp -rf sophon-ffmpeg_0.4.0//lib sophon-ffmpeg_0.4.0/include/ ~/fugui/soc-sdk:~/fugui/sophon-mw_20221027_183429/sophon-mw-soc_0.4.0_aarch64/opt/sophon# cp -rf sophon-opencv_0.4.0//lib sophon-opencv_0.4.0/include/ ~/fugui/soc-sdk
很简单,复制过去,交叉编译的环境就搭建好了
TPU-NNTC环境
这里我们是要在docker环境里编译的,所以先进入docker
:~/fugui# docker run -v $PWD/:/workspace -it sophgo/tpuc_dev:latest
然后进入tpu-nntc,初始化环境
root@2bb02a2e27d5:/workspace/tpu-nntc# source ./scripts/envsetup.sh
docker里安装编译器
root@2bb02a2e27d5:/workspace/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv/build# sudo apt-get install gcc-aarch64-linux-gnu g++-aarch64-linux-gnu
进入sophon-demo路径
下载相关文件
:~/fugui/sophon-demo/sample/YOLOv5# chmod -R +x scripts/
:~/fugui/sophon-demo/sample/YOLOv5# ./scripts/download.sh
编译yolov5
我们这里只是交叉编译,不能在x86设备上运行,要复制到我们1684平台
先cmake
root@2bb02a2e27d5:/workspace/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv/build# cmake -DTARGET_ARCH=soc -DSDK=/workspace/soc-sdk ..
在make
root@2bb02a2e27d5:/workspace/sophon-demo/sample/YOLOv5/cpp/yolov5_bmcv/build# make
此时会出现.soc文件
[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-eWPar5Yp-1692844732110)(https://gitee.com/lizheng0219/picgo_img/raw/master/img202325/image-20230421134631891.png)]
把输出的文件传导我们开发板上运行下
scp -r yolov5_bmcv linaro@192.168.17.125:/data/sophon-demo/sample/YOLOv5/cpp/
运行推理图片
./yolov5_bmcv.soc --input=../../coco128 --bmodel=../../python/yolov5s_v6.1_3output_fp32_1b.bmodel --dev_id=0 --conf_thresh=0.5 --nms_thresh=0.5 --classnames=../../coco.names
推理视频
./yolov5_bmcv.soc --input=../../test.avi --bmodel=../../python/yolov5s_v6.1_3output_fp32_1b.bmodel --dev_id=0 --conf_thresh=0.5 --nms_thresh=0.5 --classnames=../../coco.names
c++推理网络摄像头
./yolov5_bmcv.soc --input=rtsp://admin:sangfor@123@192.168.17.253 --bmodel=/data/ai_box/yolov5s_640_coco_v6.1_3output_int8_1b_BM1684.bmodel --dev_id=0 --conf_thresh=0.5 --nms_thresh=0.5 --classnames=../../coco.names
./yolov5_bmcv.soc --input=rtsp://admin:sangfor@123@192.168.17.253 --bmodel=/data/models/all16_v6.1_3output_int8_4b.bmodel --dev_id=0 --conf_thresh=0.5 --nms_thresh=0.5 --classnames=/data/models/all16.names
网络摄像头:安全帽
./yolov5_bmcv.soc --bmodel=anquanmao.bmodel --dev_id=0 --conf_thresh=0.5 --nms_thresh=0.5 --classnames=../../coco.names
Python推理
python3 yolov5_opencv.py --input rtsp://admin:1111111a@192.168.16.222 --bmodel ../yolov5s_v6.1_3output_int8_4b.bmodel
前端只展示一路摄像头,我们只需要做一路摄像头使用多个算法推理。
不展示的摄像头也要实时在后台推理,有出现问题时要及时报警。
这样我们需做出单路摄像头推理多算法(单摄像头单算法也行,把所有检测都放到一个模型里,输出时只输出他选择的那个)
把所有模型统一训练比较简单,后台一块推理
sophon-pipeline
本地编译
docker run -v $PWD/:/workspace -p 8001:8001 -it sophgo/tpuc_dev:latest
source scripts/envsetup.sh
sudo apt-get install -y gcc-aarch64-linux-gnu g++-aarch64-linux-gnu libeigen3-dev
./tools/compile.sh soc /workspace/soc-sdk
开发板运行
linaro@bm1684:/data/sophon-pipeline/release/video_stitch_demo$ ./soc/video_stitch_demo --config=cameras_video_stitch1.json
英码
export PYTHONPATH=$PYTHONPATH:/system/libexport
export LD_LIBRARY_PATH=$LD_LIBRARY_PATH:/system/lib/
python
pip3 install sophon_arm-master-py3-none-any.whl --force-reinstall
pip3 install opencv-python-headless<4.3
开发板执行命令
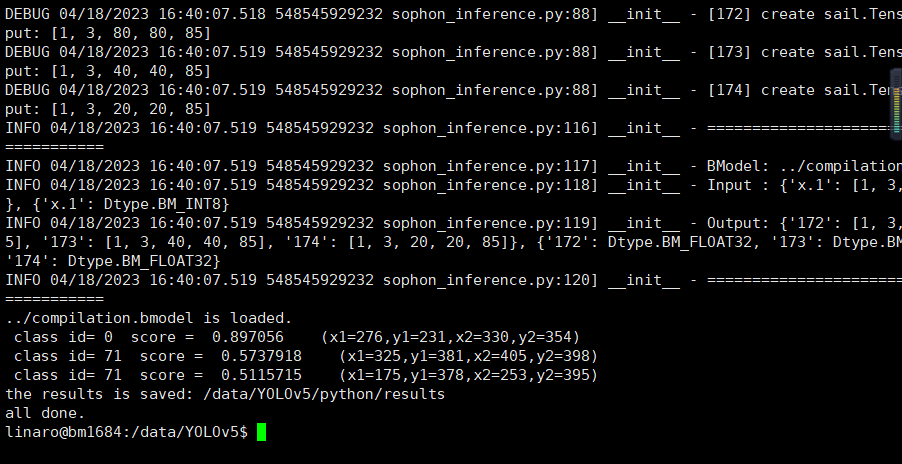
python3 python/yolov5_opencv.py --input ../data/images/coco200/000000009772.jpg --model ../compilation.bmodel --dev_id 0 --conf_thresh 0.5 --nms_thresh 0.5
python3 python/yolov5_opencv.py --input ../data/xiyanimg/000017.jpg --model ../compilation.bmodel --dev_id 0 --conf_thresh 0.5 --nms_thresh 0.5
python3 python/yolov5_video.py --input rtsp://admin:sangfor@123@192.168.17.253 --model ../compilation.bmodel
python3 python/yolov5_video.py --input rtsp://admin:1111111a@192.168.16.222 --model ../compilation.bmodel --dev_id 0 --conf_thresh 0.5 --nms_thresh 0.5
tar -zxf ~/Release_221201-public/sophon-mw_20221227_040823/sophon-mw-soc_*_aarch64.tar.gz
相关文章:
SE5 - BM1684 人工智能边缘开发板入门指南 -- 模型转换、交叉编译、yolov5、目标追踪
介绍 我们属于SoC模式,即我们在x86主机上基于tpu-nntc和libsophon完成模型的编译量化与程序的交叉编译,部署时将编译好的程序拷贝至SoC平台(1684开发板/SE微服务器/SM模组)中执行。 注:以下都是在Ubuntu20.04系统上操…...
基于Java+SpringBoot+vue前后端分离英语知识应用网站设计实现
博主介绍:✌全网粉丝30W,csdn特邀作者、博客专家、CSDN新星计划导师、Java领域优质创作者,博客之星、掘金/华为云/阿里云/InfoQ等平台优质作者、专注于Java技术领域和毕业项目实战✌ 🍅文末获取源码联系🍅 👇🏻 精彩专…...

vue使用vue-router报错
报错1. app.js:172 Uncaught TypeError: vue_router__WEBPACK_IMPORTED_MODULE_0__.default is not a constructor at eval (index.js:4:1) at ./src/router/index.js (app.js:108:1) at webpack_require (app.js:169:33) at fn (app.js:442:21) at eval (main.js:7:71) at ./…...

编写Dockerfile制作Web应用系统nginx镜像,生成镜像nginx:v1.1,并推送其到私有仓库。
环境: CentOS 7 Linux 3.10.0-1160.el7.x86_64 具体要求如下: (1)基于centos基础镜像; (2)指定作者信息; (3)安装nginx服务,将提供的dest目录…...

js 类、原型及class
js 一直允许定义类。ES6新增了相关语法(包括class关键字)让创建类更容易。新语法创建的类和老式的类原理相同。js 的类和基于原型的继承机制与Java等语言中的类和继承机制有着本质区别。 1 类和原型 类意味着一组对象从同一个原型对象继承属性。因此,原型对象是…...
day-30 代码随想录算法训练营 回溯part06
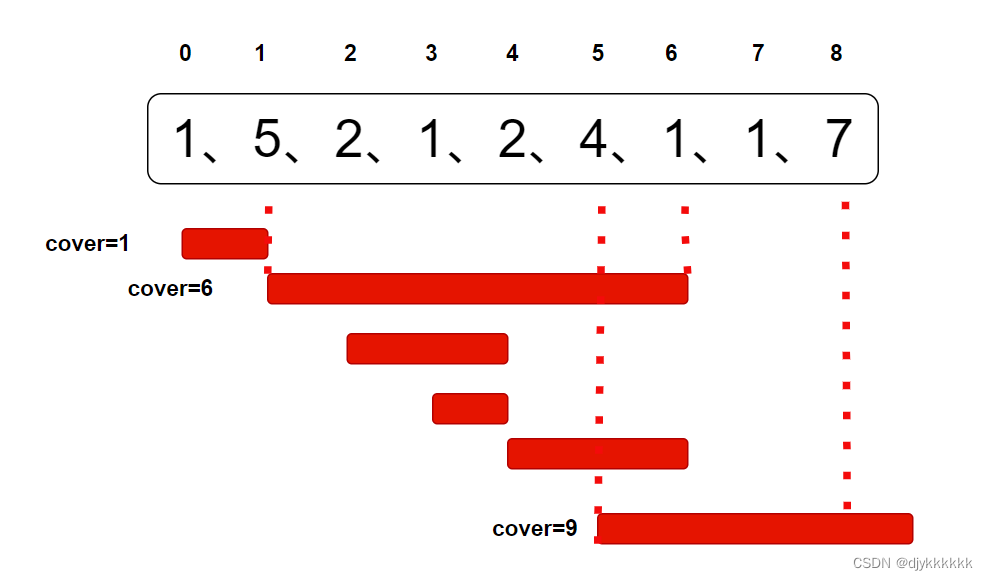
332.重新安排行程 思路:使用unordered_map记录起点机场对应到达机场,内部使用map记录到达机场的次数(因为map会进行排序,可以求出最小路径) class Solution { public:vector<string>res;unordered_map<stri…...
)
txt、pcd、las、ply 格式点云基本的读写和显示 (附 python c++ 代码)
一、文本(txt) 1.1、存储结构 使用文本格式存储的点云数据文件结构比较简单,每个点是一行记录,点的信息存储格式为 x y z或者 x y z r g b。 1.2、读取 读取文本格式的点云数据时,可以按照一般的文本读取方法,这里记录一下如何使用open3d读取txt格式的点云数据 impo…...
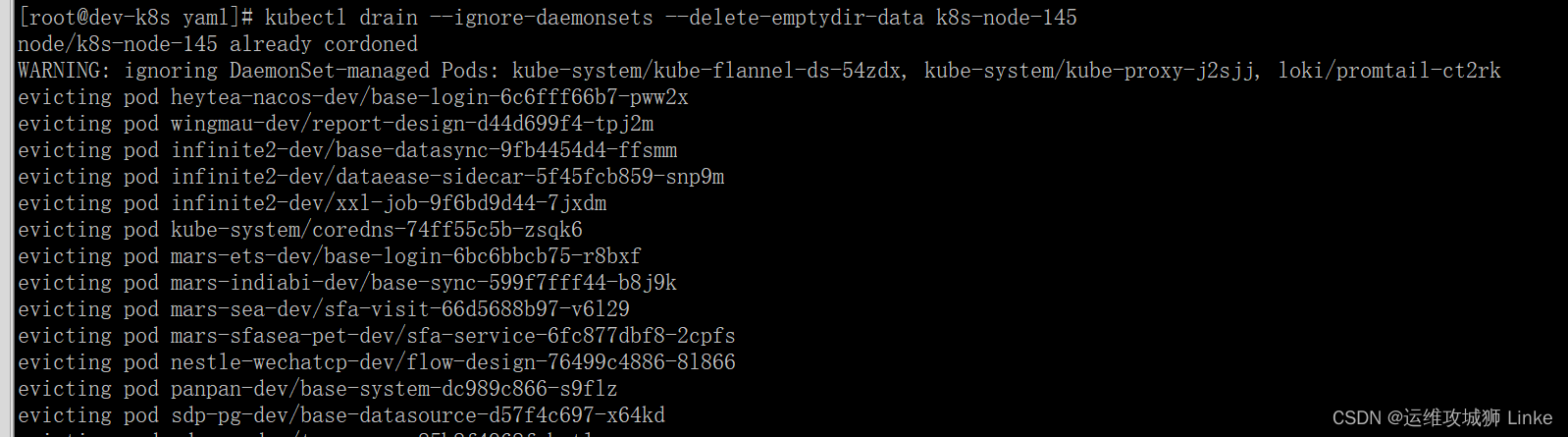
k8s节点pod驱逐、污点标记
一、设置污点,禁止pod被调度到节点上 kubectl cordon k8s-node-145 设置完成后,可以看到该节点附带了 SchedulingDisabled 的标记 二、驱逐节点上运行的pod到其他节点 kubectl drain --ignore-daemonsets --delete-emptydir-data k8s-node-145 显示被驱逐…...
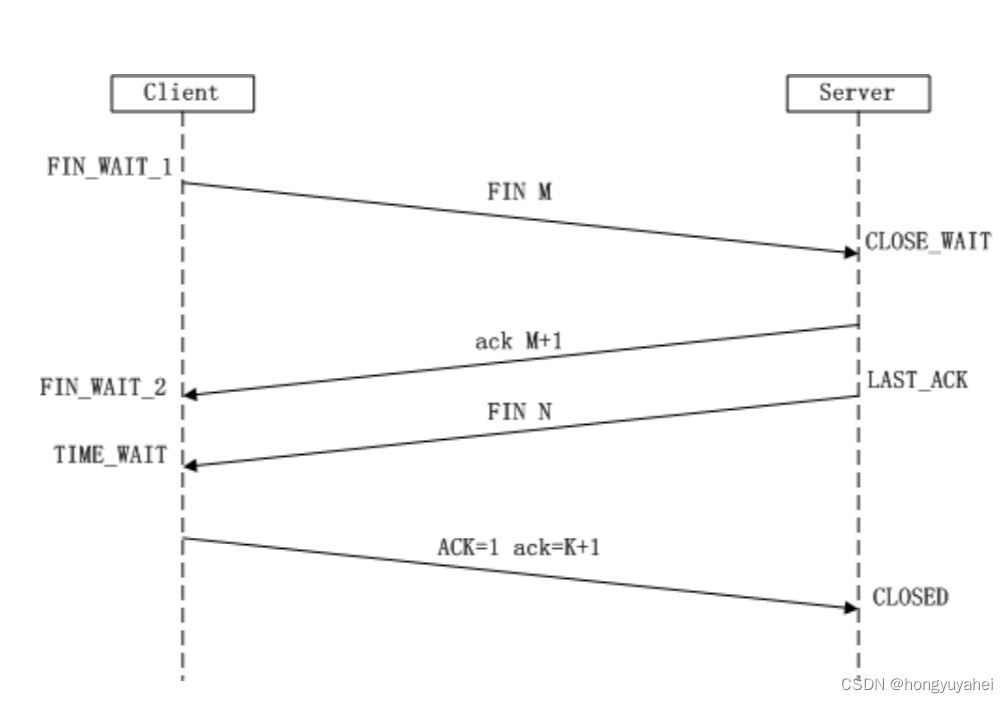
【项目 计网6】 4.17 TCP三次握手 4.18滑动窗口 4.19TCP四次挥手
文章目录 4.17 TCP三次握手4.18滑动窗口4.19TCP四次挥手 4.17 TCP三次握手 TCP 是一种面向连接的单播协议,在发送数据前,通信双方必须在彼此间建立一条连接。所谓的“连接”,其实是客户端和服务器的内存里保存的一份关于对方的信息ÿ…...

茶叶小笔记
文章目录 茶叶的作用茶叶的主要成分茶多酚氨基酸(蛋白质)生物碱 茶叶的分类乌龙茶铁观音(安溪) 绿茶龙井(西湖)龙井43 绿茶(日照)毛尖(信阳毛尖)太平猴魁六安瓜片 红茶金骏眉大红袍 白茶云南白茶 黄茶黑茶花草茶 茶叶的形状过期茶的利用茶叶蛋大排档泡澡泡脚除湿除臭 茶渣的利用…...
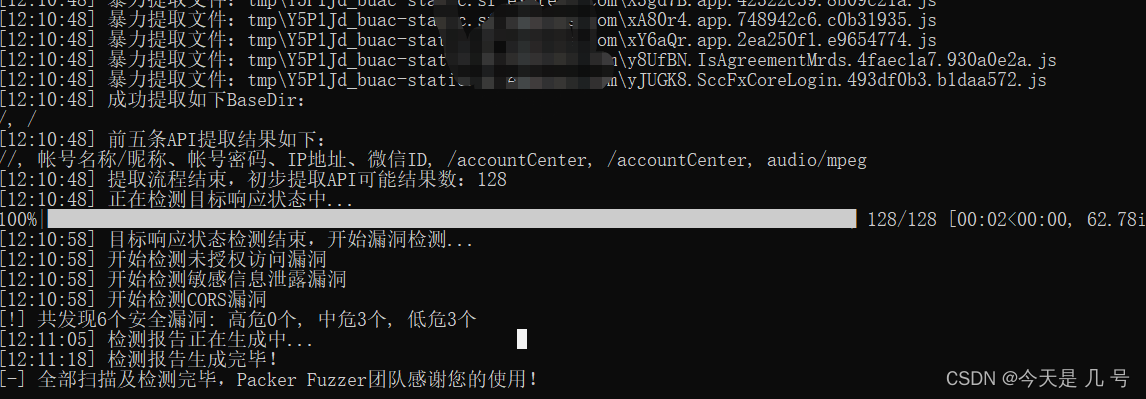
安全开发-JS应用NodeJS指南原型链污染Express框架功能实现审计WebPack打包器第三方库JQuery安装使用安全检测
文章内容 环境搭建-NodeJS-解析安装&库安装安全问题-NodeJS-注入&RCE&原型链案例分析-NodeJS-CTF题目&源码审计打包器-WebPack-使用&安全第三方库-JQuery-使用&安全 环境搭建-NodeJS-解析安装&库安装 Node.js是运行在服务端的JavaScript 文档参考…...
Android JNI系列详解之CMake编译工具的使用
一、CMake工具的介绍 如图所示,CMake工具的主要作用是,将C/C编写的native源文件编译打包生成库文件(包含动态库或者静态库文件),集成到Android中使用。 二、CMake编译工具的使用 使用主要是配置两个文件:CM…...

springboot中关于继承WebMvcConfigurationSupport后自定义的全局Jackson失效解决方法,localdate返回数组问题
一般情况下我们在config里增加jackson的全局配置文件就能满足基本的序列化需求,比如前后端传参的问题。 Configuration public class JacksonConfig {public static final String LOCAL_TIME_PATTERN "HH:mm:ss";public static final String LOCAL_DATE…...

LeetCode 面试题 02.03. 删除中间节点
文章目录 一、题目二、C# 题解 一、题目 若链表中的某个节点,既不是链表头节点,也不是链表尾节点,则称其为该链表的「中间节点」。 假定已知链表的某一个中间节点,请实现一种算法,将该节点从链表中删除。 例如&#x…...

Redis知识点总结
概述 Redis诞生于2009年,全称是Remote Dictionarty Server(远程词典服务器) 只支持单线程 非关联:主要指的是表中没有主外键等概念 Redis是一款内存数据库,主要存储键值对类型的数据 基本用法 注意:该操作是在cli中进行的 键名…...
(四)k8s实战-服务发现
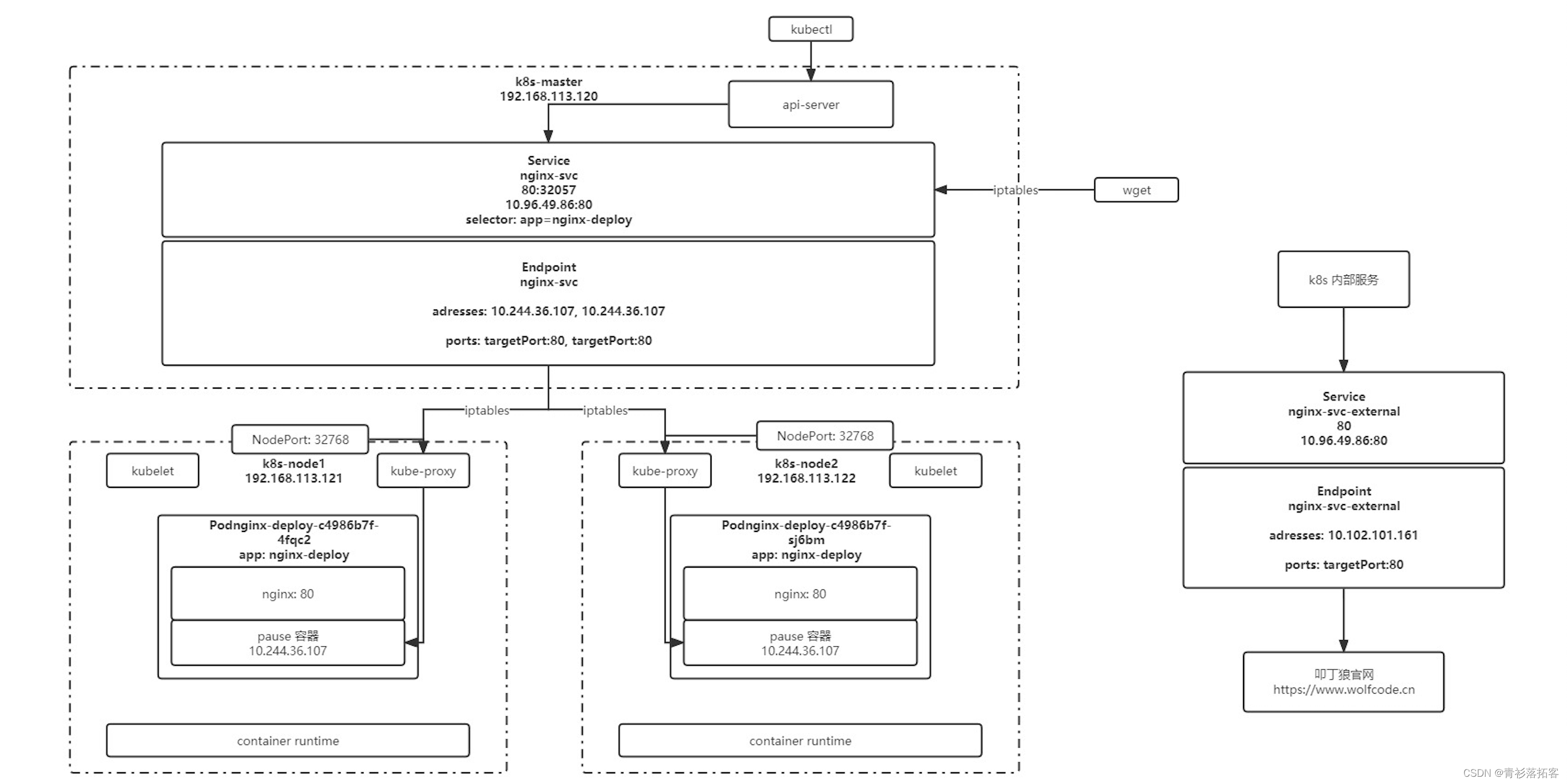
一、Service 1、配置文件 apiVersion: v1 kind: Service metadata:name: nginx-svclabels:app: nginx-svc spec:ports:- name: http # service 端口配置的名称protocol: TCP # 端口绑定的协议,支持 TCP、UDP、SCTP,默认为 TCPport: 80 # service 自己的…...

AxureRP制作静态站点发布互联网,内网穿透实现公网访问
AxureRP制作静态站点发布互联网,内网穿透实现公网访问 文章目录 AxureRP制作静态站点发布互联网,内网穿透实现公网访问前言1.在AxureRP中生成HTML文件2.配置IIS服务3.添加防火墙安全策略4.使用cpolar内网穿透实现公网访问4.1 登录cpolar web ui管理界面4…...
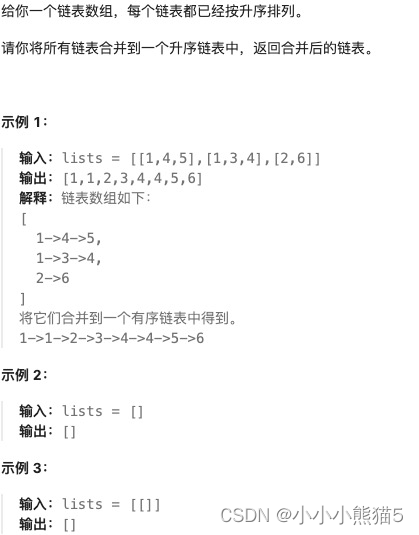
[Go版]算法通关村第十四关白银——堆高效解决的经典问题(在数组找第K大的元素、堆排序、合并K个排序链表)
目录 题目:在数组中找第K大的元素解法1:维护长度为k的最小堆,遍历n-k个元素,逐一和堆顶值对比后,和堆顶交换,最后返回堆顶复杂度:时间复杂度 O ( k ( n − k ) l o g k ) O(k(n-k)logk) O(k(n−…...
『FastGithub』一款.Net开源的稳定可靠Github加速神器,轻松解决GitHub访问难题
📣读完这篇文章里你能收获到 如何使用FastGithub解决Github无法访问问题了解FastGithub的工作原理 文章目录 一、前言二、项目介绍三、访问加速原理四、FastGithub安装1. 项目下载2. 解压双击运行3. 运行效果4. GitHub访问效果 一、前言 作为开发者,会…...
软件开发的201个原则 阅读笔记 第172-201个原则
目录 原则172 做项目总结 第8章 产品保证原则 原则173 产品保证并不是奢侈品 原则 174 尽早建立软件配置管理过程 原则175 使软件配置管理适应软件过程 原则176 组织SCM 独立于项目管理 原则 177 轮换人员到产品保证组织 给所有中间产品一个名称和版本 原则179 控制基准 原则…...

AI 与钓鱼即服务重构电子邮件威胁格局及防御体系研究
摘要 2026 年电子邮件威胁呈现工业化、智能化、隐蔽化演进趋势,钓鱼攻击占恶意邮件活动比例达 48%,90% 的大规模钓鱼活动依托钓鱼即服务(Phishing‑as‑a‑Service, PhaaS)平台开展,攻击载荷从传统文件型恶意代码转向 …...

靠谱的沈阳塑胶地板供应商
在当前的市场环境下,选择性价比高的沈阳塑胶地板已成为众多企业和个人用户的共同诉求。随着技术的不断进步和市场竞争的加剧,用户不仅关注产品的价格,更注重其性能、耐用性和售后服务。本次推荐的5家供应商,均在沈阳塑胶地板领域表…...
)
告别Hive慢查询:用Impala在CDH集群上实现秒级数据分析(实战避坑)
告别Hive慢查询:用Impala在CDH集群上实现秒级数据分析(实战避坑) 当你的Hive查询从30分钟降到3秒,数据工程师的幸福感会直接拉满。这不是理论上的性能优化,而是我们团队在CDH生产环境迁移Hive到Impala后的真实体验。如…...

Taotoken 的用量看板如何帮助开发者优化模型调用策略
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 Taotoken 的用量看板如何帮助开发者优化模型调用策略 1. 引言:从“盲用”到“明察” 在集成大模型 API 进行开发时&am…...

NotebookLM知识库搭建,为什么83%的企业6个月内弃用?——基于17家客户POC数据的失效根因与重建框架
更多请点击: https://intelliparadigm.com 第一章:NotebookLM企业知识库搭建 NotebookLM 是 Google 推出的基于用户自有文档的 AI 助手,其核心能力在于对上传资料进行语义理解与上下文追问。在企业场景中,它可作为轻量级、隐私优…...

用户研究技能体系化:从方法到实践,打造高效产品决策
1. 项目概述:从“用户研究”到“用户研究技能”的体系化跃迁最近在和一些产品经理、设计师朋友聊天时,发现一个挺有意思的现象:大家嘴上都说“用户研究很重要”,但真到了项目里,要么是没时间做,要么是做了感…...

ARM PMU性能监控单元与PMCEID2寄存器详解
1. ARM PMU性能监控单元基础解析性能监控单元(Performance Monitoring Unit, PMU)是现代处理器架构中用于硬件级性能分析的核心组件。在ARM架构中,PMUv3作为第三代性能监控架构,提供了全面的性能事件监控能力。其工作原理是通过配置专用寄存器来选择监控…...

如何让macOS剪贴板成为你的超级助手?Clipy给你答案
如何让macOS剪贴板成为你的超级助手?Clipy给你答案 【免费下载链接】Clipy Clipboard extension app for macOS. 项目地址: https://gitcode.com/gh_mirrors/cl/Clipy 你是否曾经在复制了一段重要信息后,不小心覆盖了它,然后懊恼地想要…...
)
别再死记硬背公式了!带你用‘小偷分金币’的故事彻底理解巴什博弈(Bash Game)
从"小偷分金币"到必胜策略:用生活故事破解巴什博弈 想象一下这个场景:两个小偷A和B刚偷了一袋金币,正坐在昏暗的灯光下准备分赃。桌上整齐地码放着30枚金光闪闪的硬币,他们约定轮流拿取,每次最少拿1枚&#…...

基于Rust的高效远程桌面方案:从协议优化到部署实践
1. 项目概述:远程桌面连接的另一条路如果你和我一样,经常需要在Windows电脑上操作远在另一张桌子上的Mac,或者反过来,那么“远程桌面”这个需求就再熟悉不过了。市面上有VNC、微软的RDP,还有各种第三方工具,…...