ros2官方文档(基于humble版本)学习笔记
ros2官方文档(基于humble版本)学习笔记(一)
- 一、安装ROS2
- 二、按教程学习
- 1.CLI 工具
- 配置环境
由于市面上专门讲ROS2开发的书籍不多,近期看完了《ROS机器人开发实践》其中大部分内容还是基于ROS1写的,涉及topic,service,action等一些重要的概念,常用组件,建模与仿真,应用(机器视觉,机器语音,SLAM,机械臂),最后一章写了ROS2的安装,话题通信和服务通信的示例。总觉得不是太系统,于是决定按着ros官方文档学习ROS2,把学习过程中的要点记录下来。
一、安装ROS2
官方提供了部分操作系统平台的ROS2的二进制安装包,分别为Ubuntu Linux、RHEL、Windows,不同ROS2的版本对应的Linux版本也略有不同。
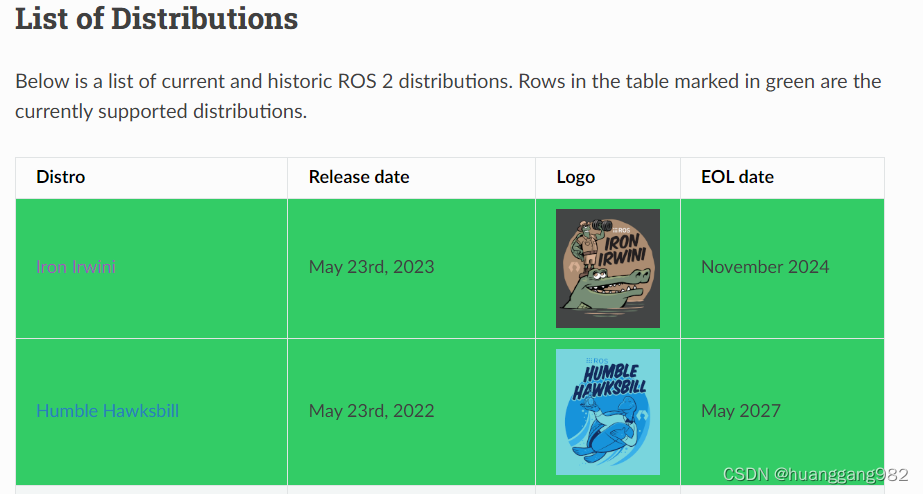
截至目前有两个ROS2的版本还没有到项目终止日期(EOL end-of-life),一个是最新的发布版本为Iron Irwini,发布时间是2023年5月23日,EOL date是2024年11月,另一个是Humble Hawksbill,发布时间是2022年5月23日,EOL date是到2027年5月,比较后我选择了Humble这个版本来学习。
为了方便,我选择了直接安装二进制安装包,首先在虚拟机上安装了Ubuntu 22.04(Jammy),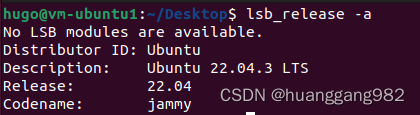
然后按照官方文档一步一步安装即可。
命令整理如下:
#--------准备工作--------
#1.确保有universe源
sudo apt install software-properties-common
sudo add-apt-repository universe
#2.获取ROS 2 GPG key以便在接下来的apt命令中使用
sudo apt update && sudo apt install curl -y
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
#3.将ROS仓库加入sources list列表
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null#--------安装ROS包--------
#1.更新源
sudo apt update
sudo apt upgrade
#2.安装桌面版(包含了ROS-Base)
sudo apt install ros-humble-desktop
#3.安装开发包
sudo apt install ros-dev-tools#--------设置环境(这一步很重要,后面使用到ROS的地方都需要执行此命令,所以一般可以直接写到.bashrc中--------
source /opt/ros/humble/setup.bash
这里值得注意的是获取ROS 2 GPG key的地方,可能由于某些原因不能获取到,就需要科学上网了,这个不再赘述(其实我还真是折腾了一阵子)。
二、按教程学习
1.CLI 工具
配置环境
首先还是上一步中最后提到的设置环境,可以通过如下命令查看环境变量:
printenv | grep -i ROS
此外还要设置以下两个环境变量:
ROS_DOMAIN_ID:可以为一个ROS节点组设置唯一的一个编号,在DDS中,使不同逻辑网络共享一个物理网络的主要机制被称为域ID,相同域ID的ROS2节点可以互相友好的发现和发送消息,而不同域ID的节点之间则不行。所有的ROS2节点默认域ID为0。为了避免在同一网络上运行ROS 2的不同计算机组之间的干扰,应为每个组设置不同的域ID。简单来说,域ID被DDS用来计算将用于发现和通信的UDP端口,只需要将域ID设置为[0,101]之间的数字即可,深究的话可以参考这里。
ROS_LOCALHOST_ONLY:ROS2通信默认不会只限制本地的。这个环境变量就是用来限制这个的。这意味着你的ROS2系统和他的话题(topic),服务(service),动作(action)对本地网络中的其他计算机不可见。在特定场合设置该项是有帮助的,比如在教室里,多个机器人可能会发布相同的话题,从而导致奇怪的行为。
相关文章:
ros2官方文档(基于humble版本)学习笔记
ros2官方文档(基于humble版本)学习笔记(一) 一、安装ROS2二、按教程学习1.CLI 工具配置环境 由于市面上专门讲ROS2开发的书籍不多,近期看完了《ROS机器人开发实践》其中大部分内容还是基于ROS1写的,涉及top…...

可拖动表格
支持行拖动,列拖动 插件:sortablejs UI: elementUI <template><div><hr style"margin: 30px 0;"><div><!-- 数据里面要有主键id, 否则拖拽异常 --><h2 style"margin-bottom: 30px&qu…...

C++语法基础
这里写目录标题 基础语法第一个程序变量常量的定义关键字标识符命名 (变量命名)sizeof的使用实型(浮点型)字符型转义字符字符串的定义 一级目录二级目录二级目录二级目录 一级目录二级目录二级目录二级目录 基础语法 第一个程序 …...

Windi CSS和Tailwind CSS以及UnoCSS
最近合作在写一个vue3ts的项目,看到其他人用了一种写法,我觉得很奇怪,之前没见过,他是这样写的 <div class"news flex-1 h-40px flex"></div>我不理解的是为什么这样写就会让这个div的高度就是40px,好多代码…...

c++ opencv将彩色图像按连通域区分
要将彩色图像按连通域区分,您可以使用 OpenCV 中的 cv::connectedComponents 函数。 下面是一个简单的示例代码,说明如何使用 cv::connectedComponents 函数来检测并标记图像中的连通域: #include <opencv2/opencv.hpp> #include <…...

〖程序员的自我修养 - 认知剖析篇⑩〗- 学习编程的高效率方法
人之所以会觉得迷茫,本质上是欠缺对自己的一个控制力、识别庞杂信息、去伪存真的独立思考与认知能力。 说明:该文属于 程序员的自我修养 专栏,购买任意白宝书体系化专栏可加入易编程社区,早鸟价订阅模式除外。福利:加入社区的小伙伴们,除了可以获取博主所有付费专栏的阅读…...
前端基础1——HTML标记语言
文章目录 一、基本了解二、HTML常用标签2.1 文本格式化标签2.2 列表标签2.3 超链接标签2.4 图片标签2.5 表格标签2.6 表单标签2.6.1 提交表单2.6.2 下拉表单2.6.3 按钮标签 2.7 布局标签 一、基本了解 网页组成(index.html页面): HTML标记语言…...

2.1: Dubbo的基本应用-负载均衡,集群容错,服务降级
负载均衡 官网地址: http://dubbo.apache.org/zh/docs/v2.7/user/examples/loadbalance/ 如果在消费端和服务端都配置了负载均衡策略, 以消费端为准。 这其中比较难理解的就是最少活跃调用数是如何进行统计的? 讲道理, 最少活跃数…...

正则常见问题及解决方案
使用正则处理问题的基本思路。有一些方法比较固定,比如将问题分解成多个小问题,每个小问题见招拆招:某个位置上可能有多个字符的话,就⽤字符组。某个位置上有多个字符串的话,就⽤多选结构。出现的次数不确定的话&#…...

docker发布项目及使用外部文件的情况处理
适用docker环境已搭建好 首先项目打jar包:server-cdzh-2.1.0-SNAPSHOT.jar 创建Dockerfile FROM java:8 ADD server-cdzh-2.1.0-SNAPSHOT.jar cdzh.jar EXPOSE 60156 ENTRYPOINT ["java","-jar","/cdzh.jar"] 在linux服务器新建…...

CSS 中哪些属性可以继承
1. 字体属性: font、font-style、font-variant、font-weight、font-size、line-height等属性是字体样式的属性,都可以被子元素继承。 2. 文本属性: color、text-indent、text-align、text-decoration、text-transform、letter-spacing、wo…...

vue cli构建的项目出现 Uncaught runtime errors
使用 vue/cli 脚手架构建的项目,在 npm run dev 运行后,页面出现 Uncaught runtime errors 报错遮罩层,如下图所示。 报错原因 这种错误通常是运行时出的问题,可能是网络错误,可能是变量未定义等等。 这种错误默认在开…...
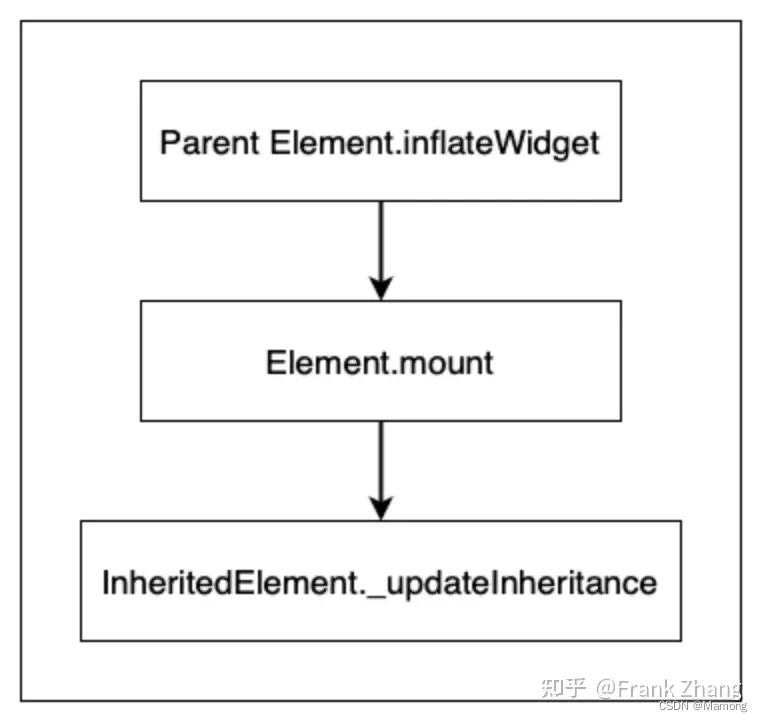
透过源码理解Flutter InheritedWidget
InheritedWidget的核心是保存值和保存使用这个值的widget,通过对比值的变化,来决定是否要通知那些使用了这个值的widget更新自身。 1 updateShouldNotify和notifyClients InheritedWidget通过updateShouldNotify函数控制依赖其的子组件是否在Inherited…...

天去面试的时候,遇到一个问题。我三个任务,ABC,我怎么让A执行完执行B,B执行完执行C 3个并行线程,如何解决。程池的核心运行原理和参数。
今天去面试的时候,遇到一个问题。我三个任务,ABC,我怎么让A执行完执行B,B执行完执行C 3个并行线程,如何解决。程池的核心运行原理和参数。 1.线程池核心的参数 1.线程核心数- 线程池中始终保持的活动线程数量。 2.最…...

使用finksql方式将mysql数据同步到kafka中,每次只能同步一张表
使用finksql方式将mysql数据同步到kafka中,每次只能同步一张表 package flink;import org.apache.flink.streaming.api.environment.StreamExecutionEnvironment; import org.apache.flink.table.api.TableResult; import org.apache.flink.table.api.bridge.java.…...
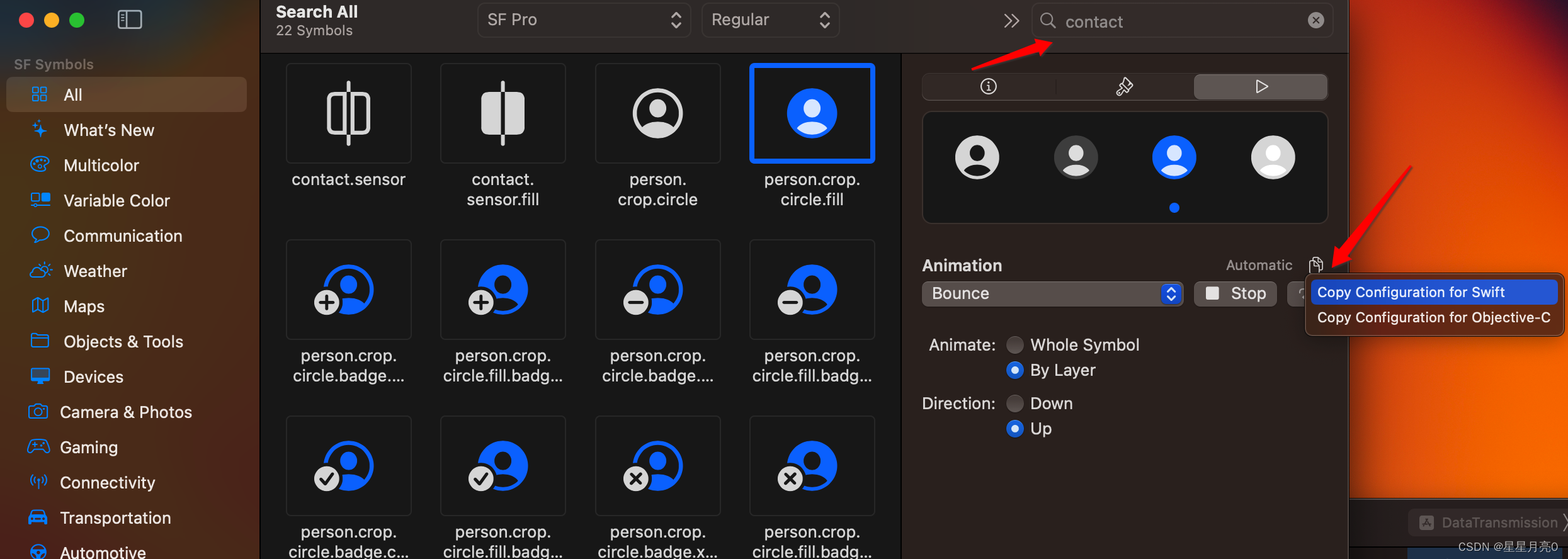
ios开发 swift5 苹果系统自带的图标 SF Symbols
文章目录 1.官网app的下载和使用2.使用代码 1.官网app的下载和使用 苹果官网网址:SF Symbols 通过上面的网址可以下载dmg, 安装到自己的mac上 貌似下面这样不能展示出动画,还是要使用动画的代码 .bounce.up.byLayer2.使用代码 UIKit UIImage(system…...
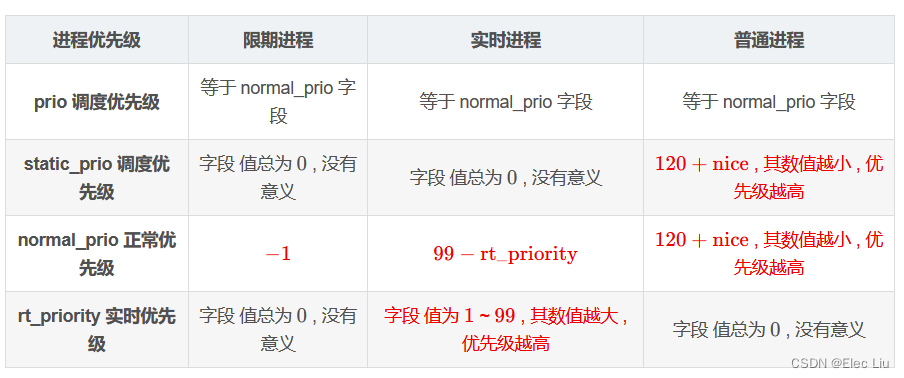
Linux内核源码分析 (3)调度器的实现
Linux内核源码分析 (3)调度器的实现 文章目录 Linux内核源码分析 (3)调度器的实现一、概述二、调度器数据结构1、task_struct中与调度有关的的成员2、调度器类3、就绪队列4、调度实体 三、处理优先级1、优先级的内核表示2、计算优先级3、计算负荷权重 四、核心调度器1、周期性调…...

网络安全法+网络安全等级保护
网络安全法 网络安全法21条 网络安全法31条 网络安全等级保护 网络安全等级保护分为几级? 一个中心,三重防护 等级保护2.0网络拓扑图 安全区域边界 安全计算环境 等保安全产品 物理机房安全设计...

持续集成对软件项目管理的作用
l、对项目目标管理的作用 软件项目的目标是开发出可运行的、客户满意的软件系统持续集成有统一的代 码库。要求开发人员定期地、不断地向代码库提交代码。新近提交的代码会经过编 译与测试.与代码库中旧有的代码相整合,形成安全稳定运行的代码库&…...
【Qt QAxObject】使用 QAxObject 高效任意读写 Excel 表
1. 用什么操作 Excel 表 Qt 的官网库中是不包含 Microsoft Excel 的操作库,关于对 Microsoft Excel 的操作库可选的有很多,包含基于 Windows 系统本身的 ActiveX、Qt Xlsx、xlsLib、LibXL、qtXLS、BasicExcel、Number Duck。 库.xls.xlsx读写平台Qt Xls…...

element-plus主题换色
提示:本篇暂未完善全,仅仅提供思路 具体的实现可以参考我这篇文章,验证可行:推荐使用该链接方式实现换色 主题方式是通过切换主题的方式实现换色,例如blue、green,不推荐,仅参考逻辑。 原因&a…...

如何用嘎嘎降AI处理心理学论文:心理学研究生毕业论文降AI4.8元完整操作教程
如何用嘎嘎降AI处理心理学论文:心理学研究生毕业论文降AI4.8元完整操作教程 关于心理学论文降AI教程,有几个细节提前知道能少走很多弯路。 核心用嘎嘎降AI(www.aigcleaner.com),4.8元,达标率99.26%。这篇…...

教育机构搭建ai编程辅导平台时如何通过taotoken管理多学生密钥
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 教育机构搭建AI编程辅导平台时如何通过Taotoken管理多学生密钥 在AI编程辅导平台的构建中,教育机构常常面临一个核心的…...

【Prometheus监控Linux系统】
提示:本文原创作品,良心制作,干货为主,简洁清晰,一看就会 文章目录前言一、环境介绍二、安装node_exporter2.1 安装docker2.2 安装docker-compose2.3 安装node_exporter三、修改prometheus配置3.1 修改prometheus.yml3…...

安捷伦E8257D/E8267D信号源不开机、输出不正常故障排查
安捷伦E8257D/E8267D信号源作为射频微波测试领域的常用设备,广泛应用于通信、半导体等行业,长期高负荷运行后,不开机、输出不正常等故障十分常见,给测试工作带来诸多困扰。常见故障一:安捷伦E8257D/E8267D不开机不开机…...

海外渠道通知短信接口
在跨境业务体系中,企业常面临区域代理商分散、信息同步滞后、补货提醒不及时的问题,传统邮件、即时通讯易出现漏读、延迟,而国际渠道通知短信接口凭借触达稳定、实时性强的优势,成为跨境企业对接代理商的高效通信方案。本文从接口…...

5个简单步骤掌握GanttProject:免费开源的项目管理工具终极指南
5个简单步骤掌握GanttProject:免费开源的项目管理工具终极指南 【免费下载链接】ganttproject Official GanttProject repository. 项目地址: https://gitcode.com/gh_mirrors/ga/ganttproject GanttProject是一款功能强大的免费开源项目管理软件,…...

3分钟快速上手vJoy:如何为Windows创建专业级虚拟游戏手柄
3分钟快速上手vJoy:如何为Windows创建专业级虚拟游戏手柄 【免费下载链接】vJoy Virtual Joystick 项目地址: https://gitcode.com/gh_mirrors/vj/vJoy 您是否曾经因为缺少游戏手柄而无法畅玩那些只支持手柄操作的游戏?或者需要为特殊软件设计自定…...

Files.md:打造私密思考空间,兼具简洁实用与多样同步功能!
Files.md:专注思考的私密空间Files.md 是一款简洁的 .md 文件应用,为用户打造一个私密、安静的思考空间。用户可以用它存储生活中的一切,如笔记、文档、项目、日记、习惯记录、待办清单和任务等,所有内容都以纯 .md 文件形式保存&…...

Steam创意工坊模组下载神器:跨平台游戏玩家的必备工具
Steam创意工坊模组下载神器:跨平台游戏玩家的必备工具 【免费下载链接】WorkshopDL WorkshopDL - The Best Steam Workshop Downloader 项目地址: https://gitcode.com/gh_mirrors/wo/WorkshopDL 你知道吗?作为一名游戏爱好者,你是否曾…...