【OpenCV入门】第一部分——图像处理基础
本文结构
- 图像处理的基本操作
- 读取图像
- imread()
- 显示图像
- imshow()
- waitKey()
- destroyAllWindows()
- 保存图像
- imwrite()
- 获取图像属性
- 像素
- 确定像素的位置
- 获取像素的BGR值
- 修改像素的BGR值
- 色彩空间
- GRAY色彩空间
- cvtColor()——从BGR色彩空间转换到GRAY色彩空间
- HSV色彩空间
- 从BGR色彩空间转换到HSV色彩空间
- 通道
- 拆分通道
- 拆分一幅BGR图像中的通道
- 拆分一幅HSV图像中的通道
- 合并通道
- 综合运用拆分通道和合并通道
- alpha通道
图像处理的基本操作
图像处理包括4个基本操作:读取图像、显示图像、保存图像和获取图像属性。
读取图像
imread()
image = cv2.imread(filename,flags)
- filename:目标图像的完整路径名。
- flags:图像的颜色类型的标记,有0和1两个值,其中1为默认值。当读取一幅彩色图像时,如果想要得到一幅彩色图像,那么flags的值为1(此时flags的值可以省略);想要得到一幅灰度图像则为0。
- image:是imread()方法的返回值,返回的是读取到的彩色图像或者灰度图像。
其实就是读取了一个存在filename路径的图片,然后用image去表示这个图片而已(image只是一个举例,你爱叫啥叫啥),flags是0还是1取决于你想要彩图还是灰白图。
实例1: 读取当前项目目录下的图像
在PyCharm中的Demos项目下,有一幅名为1.jpg的图像。
现在先使用imread()方法读取1.jpg,再使用print()方法打印1.jpg。代码如下所示:
import cv2 # 导入库image = cv2.imread("1.jpg",1) # 读取1.jpg,等价于image = cv2.imread("1.jpg")
print(image) # 打印1.jpg
部分结果如下:
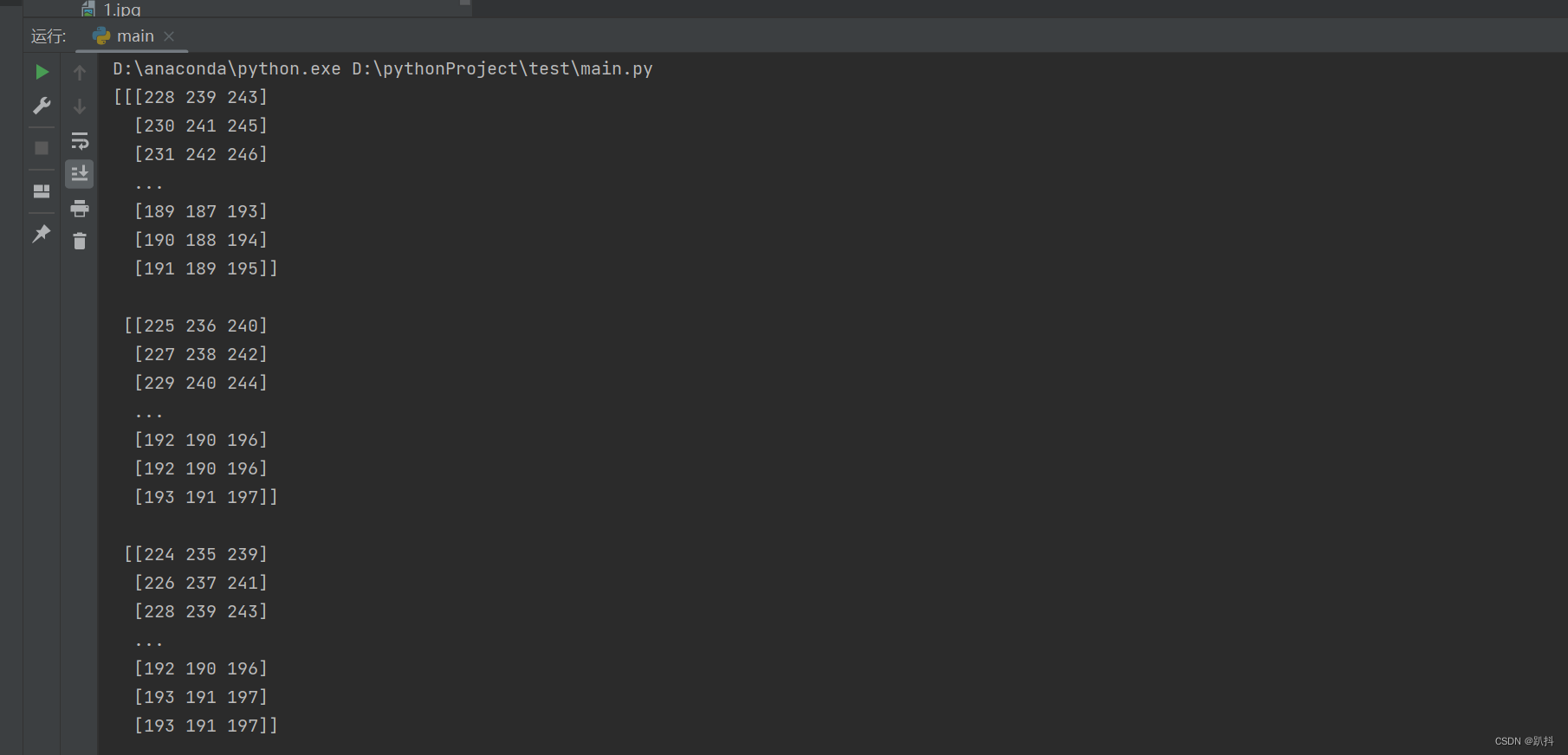 图中输出的数字是1.jpg的部分像素值。
图中输出的数字是1.jpg的部分像素值。
如果图像存储在电脑C盘中,示例代码如下:
import cv2 #opencv读取的格式是BGRimg = cv2.imread('C:/Users/lenovo/Pictures/Saved Pictures/castle.jpg') # 路径中不能出现中文
print(image)
注意:“D:/1.jpg"等价于"D:\1.jpg”
显示图像
imshow()
imshow()方法用于显示图像:
cv2.imshow(winname,mat)
- winname: 显示图像的窗口名称。
- mat: 要显示的图像
waitKey()
waitKey()方法用于等待用户按下键盘上的某个按键时将执行waitKey()方法,并且获取与这个按键相对应的ASCII码:
retval = cv2.waitKey(delay)
- delay:等待用户按下键盘上按键的时间,单位为毫秒(ms)。当delay的值为负数,0或者空时,表示无限等待用户按下键盘上按键的时间。
- retval:与被按下的按键相对应的ASCII码。例如ESC键的ASCII码是27,当用户按下该键时,waitKey()方法的返回值为27.如果没有按键被按下,waitKey()方法的返回值是-1。
destroyAllWindows()
destroyAllWindows()方法用于销毁所有正在显示图像的窗口:
cv2.destroyAllWindows()
实例2: 窗口显示图像
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
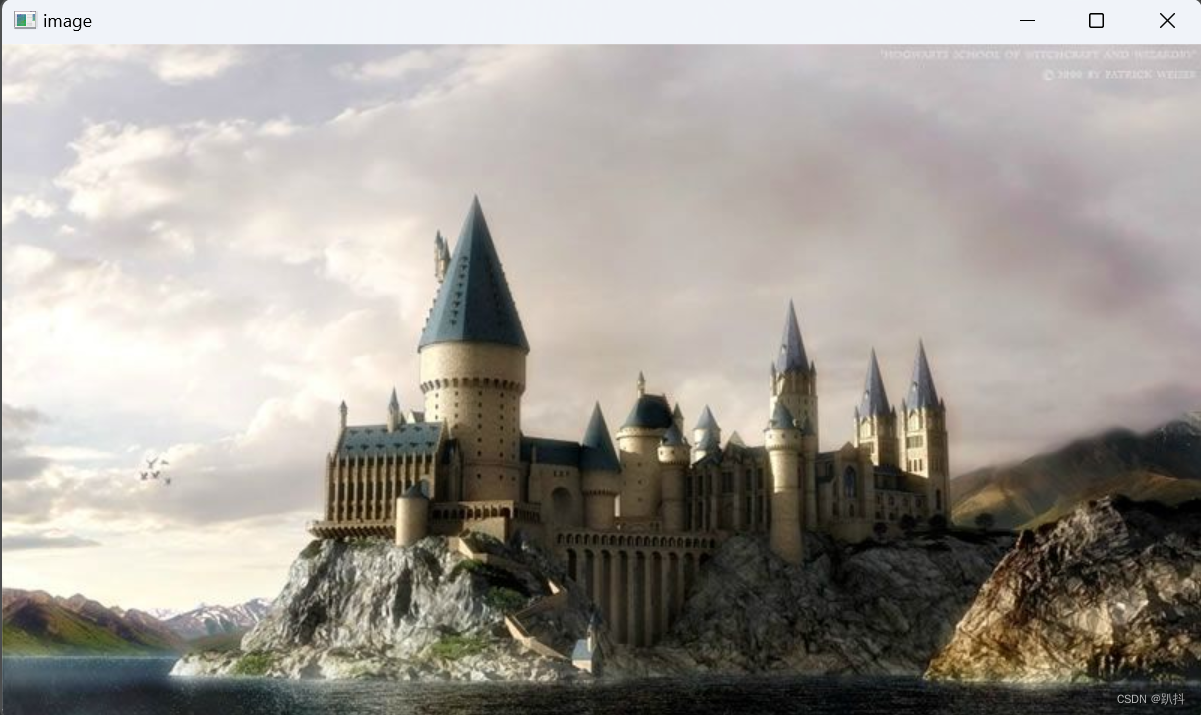
cv2.imshow("image",image) # 在名为 image 的窗口中显示1.jpg
cv2.waitKey() # 按下任何键盘按键中
cv2.destroyAllWindows() # 销毁所有窗口
结果如下:
如果想设置窗口显示图像的时间为5s,示例代码如下:
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("image",image) # 在名为 image 的窗口中显示1.jpg
cv2.waitKey(5000) # 括号内单位为ms
cv2.destroyAllWindows() # 销毁所有窗口
注意:
- 显示图像的窗口名称不能是中文,否则会乱码。
- 为了能够正常显示图像,要在cv2.imshow()后紧跟着cv2.waitKey()。
保存图像
imwrite()
imwrite()可按照指定路径保存图像
cv2.imwrite(filename,img)
- filename: 保存图像时所用的完整路径
- img: 要保存的图像
实例3: 保存图像
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imwrite("D:/Pictures/1.jpg",image) # 把1.jpg保存为D盘根目录下,Pictures文件夹中的1.jpg
注意: 运行上述代码前,要在E盘根目录下新建一个空的Pictures文件夹
获取图像属性
处理图像的过程中,经常需要获取图像的大小、类型等图像属性。为此,OpenCV提供了shape、size和dtype这3个常用属性。
- shape: 如果是彩色图像,那么获取的是一个包含图像的像素行数、像素列数、通道数的数组,数组的格式为
(像素行数,像素列数,通道数);如果是灰度图像,那么获取的是一个包含图像的像素列数、像素行数的数组,数组的格式为(像素行数,像素列数)。 - size: 获取的是图像包含的像素总数,其值为
像素行数×像素列数×通道数(灰度图像的通道数为1) - dtype: 获取的是图像的数据类型
实例4: 打印彩色图像和灰度图像的属性
import cv2image_Color = cv2.imread("1.jpg", 1) # 读取1.jpg
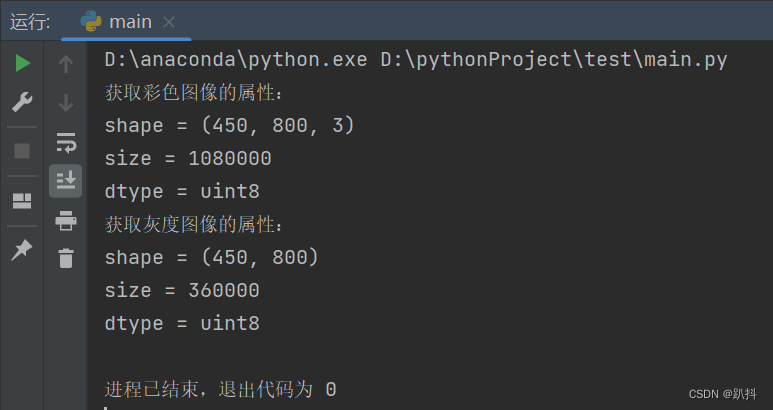
print("获取彩色图像的属性:")
print("shape =",image_Color.shape) #打印彩色图像的(像素行数,像素列数,通道数)
print("size =",image_Color.size) #打印彩色图像包含的像素总数
print("dtype =",image_Color.dtype) #打印彩色图像的数据类型image_Gray = cv2.imread("1.jpg", 0) # 读取1.jpg的灰度图像
print("获取灰度图像的属性:")
print("shape =",image_Gray.shape) #打印灰度图像的(像素行数,像素列数)
print("size =",image_Gray.size) #打印灰度图像包含的像素总数
print("dtype =",image_Gray.dtype) #打印灰度图像的数据类型
结果如下:
像素
像素是构成数字图像的基本单位。将电脑上的一幅图片放大,会发现图像是由许多个小方块组成的,通常把一个小方块称作一个像素。因此,一个像素是具有一定面积的一个块,而不是一个点。需要注意的是,像素的形状是不固定的,大多数情况下,像素被认为是方形的,但有时也可能是圆形的或者是其他形状的。
确定像素的位置
在OpenCV中,正确表示图像中某个像素坐标的格式为 (y,x) ,方向示意图如下:
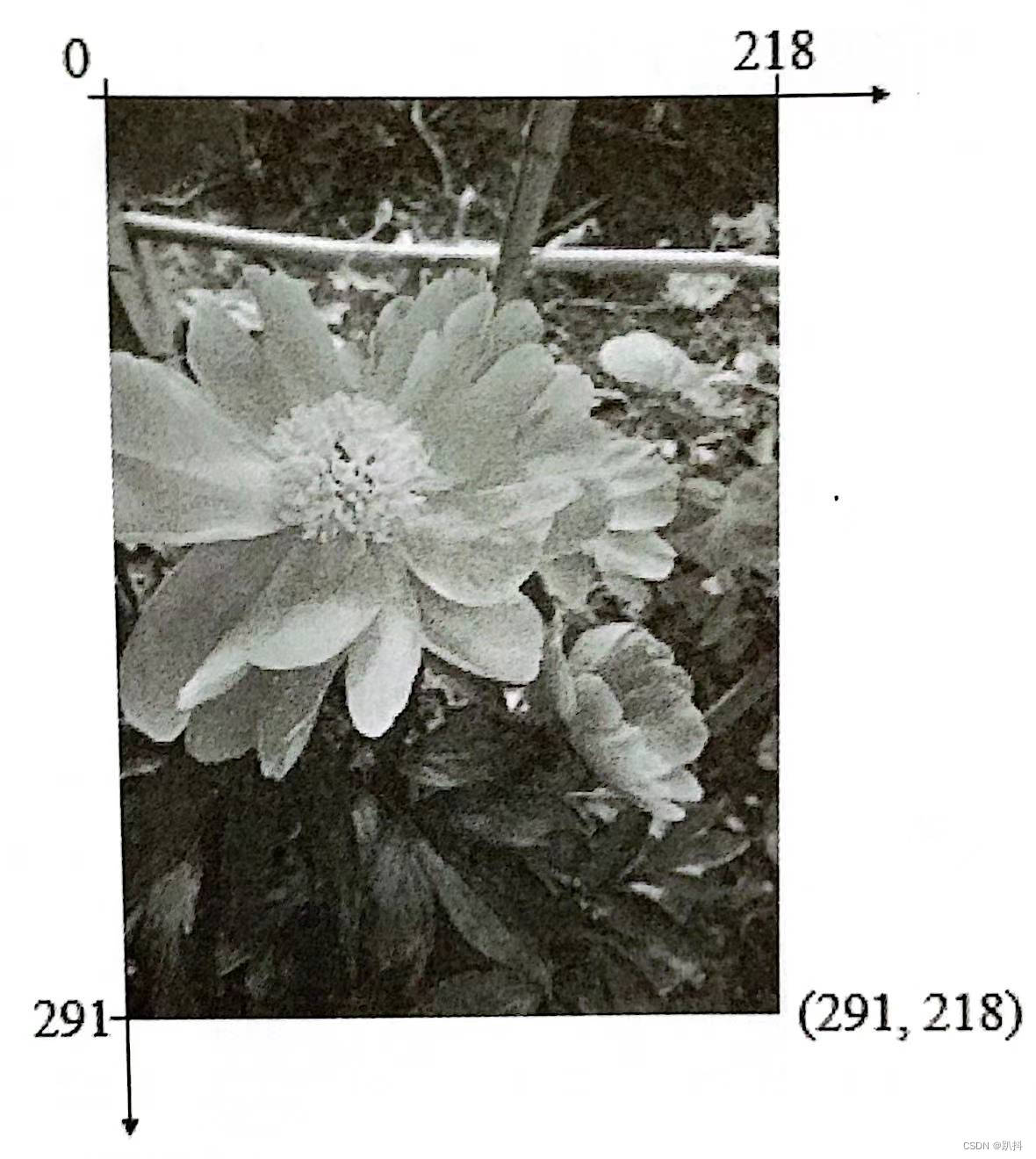
实例5: 表示图中的指定像素
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
px = image[50,30] # 坐标(50,30)上的像素
获取像素的BGR值
人眼能够感知红色、绿色和蓝色这3种不同的颜色,称为三基色。计算机利用色彩空间对颜色进行编码,把与“三基色”对应的色彩空间称作“RGB色彩空间”。
在RGB色彩空间种包含3个通道:R通道、G通道、B通道,分别代表红色通道、绿色通道、蓝色通道,每个通道都在区间[0,255]内进行取值。这样,计算机通过为这3个色彩通道取不同的值来表示不同的颜色。
OpenCV默认的通道顺序是B->G->R。也就是说,当OpenCV获取图像内某个像素的值时,这个值指的是这个像素的BGR值,OpenCV默认使用的色彩空间是BGR色彩空间。
在实例5中,凭借一个标签px就成功地表示了坐标(50,30)上的像素。如果使用print()方法打印这个像素,就会得到这个像素的BGR值。
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
px = image[50,30] # 坐标(50,30)上的像素,同时获取三个通道的值
blue = image[50, 30, 0] # 坐标(50,30)上的像素的B通道的值
green = image[50, 30, 1] # 坐标(50,30)上的像素的G通道的值
red = image[50, 30, 2] # 坐标(50,30)上的像素的R通道的值
print(px)
print(blue,green,red)
结果如下:
修改像素的BGR值
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
px = image[50, 30] # 坐标(50,30)上的像素
print("像素的初试BGR值是:",px)
px = [255,255,255] # 把坐标上的像素的值修改为[255,255,255]
print("像素修改后的BGR值是:",px)
结果如下:
当图像中的每个像素的B、G、R这3个数值相等时,就可以得到灰度图像。其中,当B = G = R = 0时,像素呈现纯黑色;当B = G = R = 255时,像素呈现纯白色。
实例6: 修改图像中的指定区域内的所有像素
在图像上设定4个点,将4个点围成的区域内的所有像素都修改为白色。
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
for i in range(241, 292): # i表示横坐标,在区间[241,291]内取值for j in range(168, 219): # j表示纵坐标,在区间[168,218]内取值image[i, j] = [255, 255, 255] # 把区域内的所有像素都修改为白色
cv2.imshow("img_02", image) # 显示像素被修改后的图像
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下:

色彩空间
上文中简单介绍了RGB色彩空间和BGR色彩空间。接下来将介绍在OpenCV中另外两个比较常见的色彩空间:GRAY色彩空间和HSV色彩空间。
GRAY色彩空间
GRAY色彩空间通常指的是灰度图像。灰度图像是一种每个像素都是从黑到白,被处理为256个灰度级别的单色图像。这256个灰度级别分别用区间[0,255]中的数值表示。“0”表示黑色,“255”表示白色,0~255之间的数值表示不同亮度(即色彩的深浅程度)的深灰色和浅灰色。
cvtColor()——从BGR色彩空间转换到GRAY色彩空间
OpenCV可以使用imread()方法把图片读取为灰度图像。除此之外,OpenCV还提供了cvtColor()方法用于转换图像的色彩空间。
dst = cv2.cvtColor(src,code)
- src: 转换色彩空间前的初始图象
- code: 色彩空间转换码
- dst: 转换色彩空间后的图像
当一幅彩色图像从BGR色彩空间转换到GRAY色彩空间时,需要使用的色彩空间转换码时cv2.COLOR_BGR2GRAY。
实例7: 从BGR色彩空间转换到GRAY色彩空间
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
# 将1.jpg从BGR色彩空间转换到GRAY色彩空间
gray_image = cv2.cvtColor(image,cv2.COLOR_BGR2GRAY)
cv2.imshow("GRAY", gray_image) # 显示灰度图像
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下;
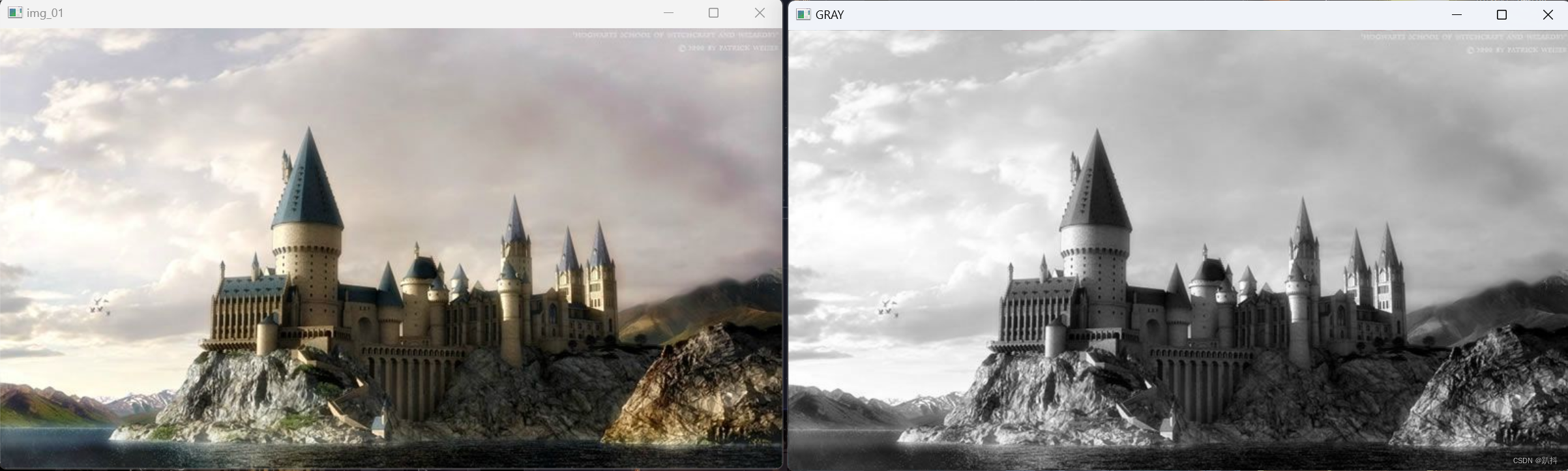
虽然色彩空间类型转换是双向的,而且OpenCV也提供了cv2.COLOR_GRAY2BGR这个色彩空间转换码,但是灰度图像是无法转换成彩色图像的。这是因为在彩色图像转换成灰度图像的过程中,已经丢失了颜色比例。
HSV色彩空间
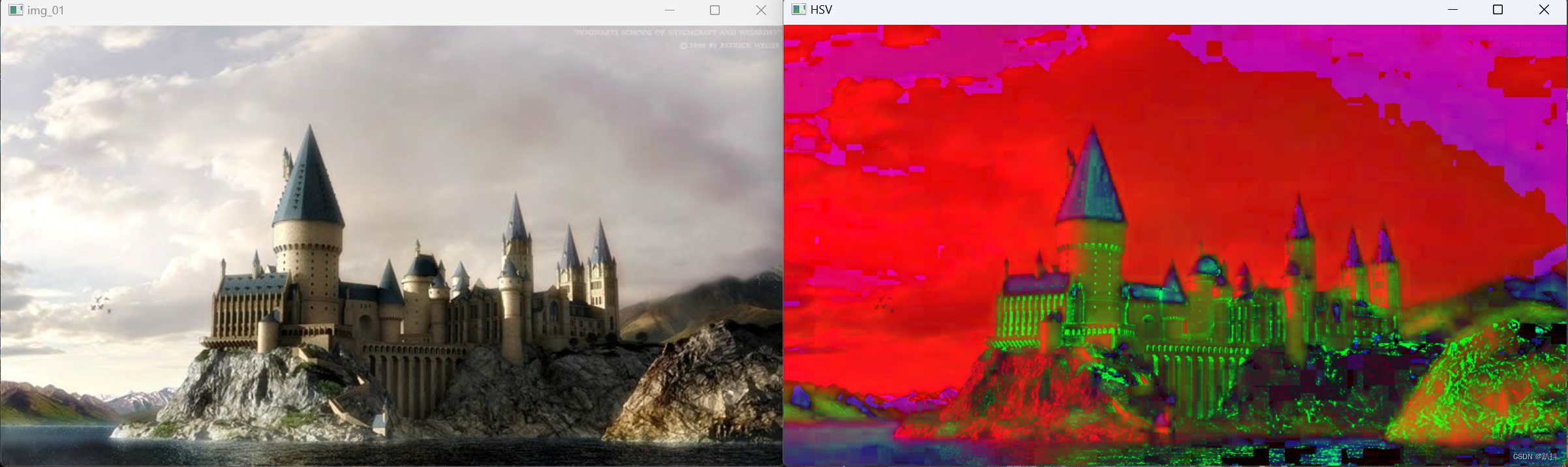
RGB色彩空间是基于三基色而言的,即红色、绿色和蓝色。而HSV色彩空间则是基于色调、饱和度和亮度而言的。
- 色调(H)是指光的颜色。OpenCV中,色调在区间[0,180]内取值。例如代表红色、黄色、绿色和蓝色的色调值分别为0、30、60和120。
- 饱和度(S)是指色彩的深浅。在OpenCV中,饱和度在[0,255]内取值。当饱和度为0时,图像将变为灰度图像。
- 亮度(V)是指光的明暗。与饱和度相同,在OpenCV中,亮度在区间[0,255]内取值。亮度值越大,图像越亮;当亮度值为0时,图像呈纯黑色。
从BGR色彩空间转换到HSV色彩空间
当一幅彩色图像从BGR色彩空间转换到HSV色彩空间时,需要使用的色彩空间转换码是cv2.COLOR_BGR2HSV
实例8:从BGR色彩空间转换到HSV色彩空间
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
# 将1.jpg从BGR色彩空间转换到HSV色彩空间
hsv_image = cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
cv2.imshow("HSV", hsv_image) # 显示灰度图像
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下:
通道
在BGR色彩空间中,包含3个通道:B通道、G通道和R通道。
拆分通道
为了拆分一幅图像中的通道,OpenCV提供了split()方法。
拆分一幅BGR图像中的通道
b, g, r = cv2.split(bgr_image)
- bgr_image: 一幅BGR图像
- b: B通道图像
- g: G通道图像
- r: R通道图像
实例9: 拆分一幅BGR图像中的通道
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
b,g,r=cv2.split(image)
cv2.imshow("B",b)
cv2.imshow("G",g)
cv2.imshow("R",r)
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下:
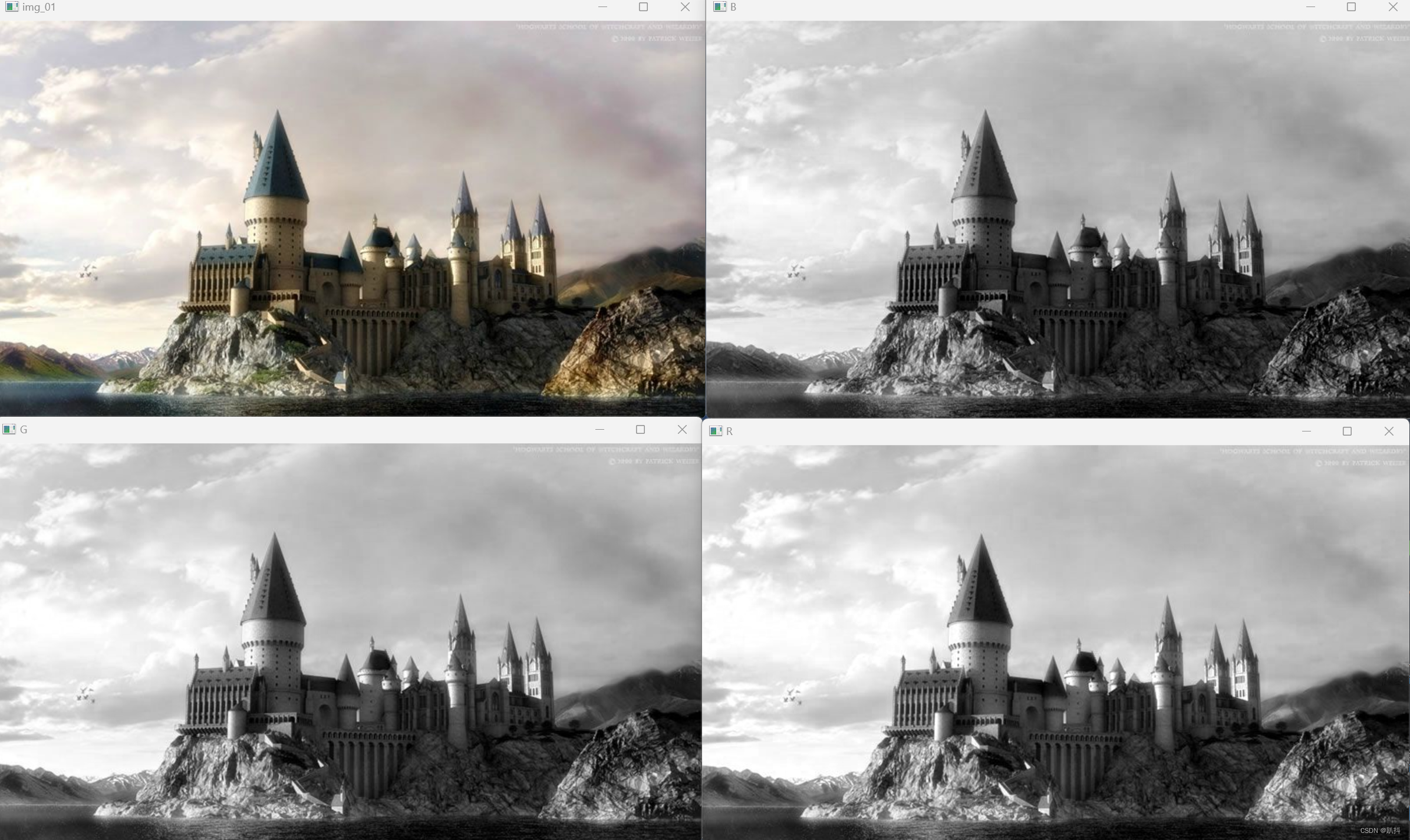
可以看到结果是0三个不同亮度的灰度图像。这是因为当程序执行到cv2.imshow(“B”,b)时原图像B、G、R这3个通道的值都会被修改为B通道的值,即(B,B,B),其余同理。对于BGR图像,只要B=G=R(即数值相等),就可以得到灰度图像。
拆分一幅HSV图像中的通道
h, s, v = cv2.split(hsv_image)
- hsv_image: 一幅HSV图像。
- h: H通道图像
- s: S通道图像
- v: V通道图像
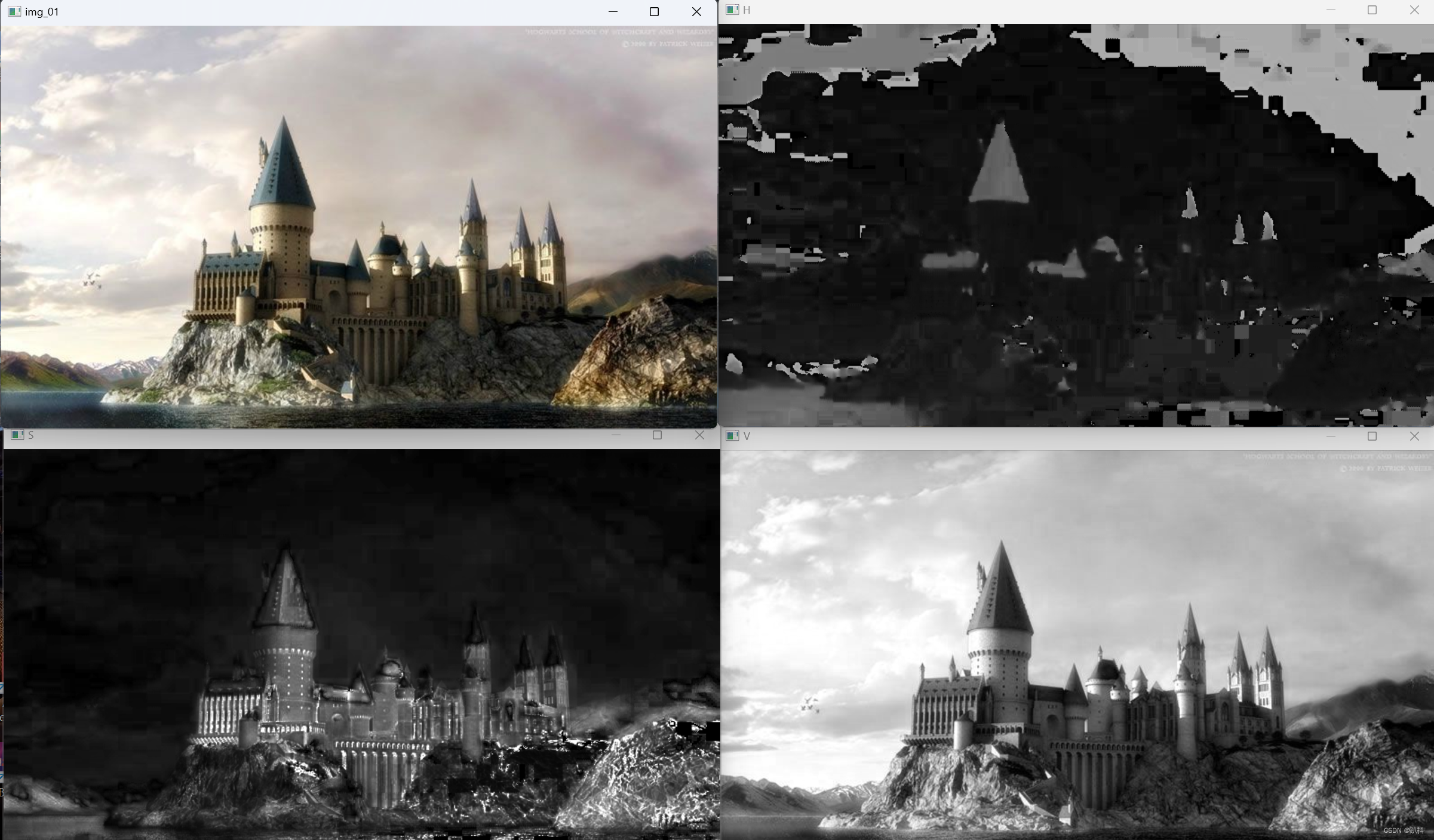
实例10: 拆分一幅HSV图像中的通道
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
hsv_image = cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
h,s,v=cv2.split(hsv_image)
cv2.imshow("H",h)
cv2.imshow("S",s)
cv2.imshow("V",v)
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下:
合并通道
使用merge()方法合并H、S、V通道图像。
hsv = cv2.merge([h, s, v])
- h: H通道图像
- s: S通道图像
- v: V通道图像
- hsv:合并H通道图像、S通道图像和V通道图像后得到的图像
实例11: 合并H、S、V通道图像
首先将图像从BGR色彩空间转换到HSV色彩空间,然后拆分得到HSV图像中的通道,接着合并拆分后的通道图像,最后显示合并通道的HSV图像。
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
hsv_image = cv2.cvtColor(image,cv2.COLOR_BGR2HSV)
h,s,v=cv2.split(hsv_image)
hsv = cv2.merge([h,s,v])
cv2.imshow("HSV",hsv)
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下:

综合运用拆分通道和合并通道
在HSV色彩空间中,如果保持其中两个通道的值不变,调整第3个通道的值,会得到响应的艺术效果。
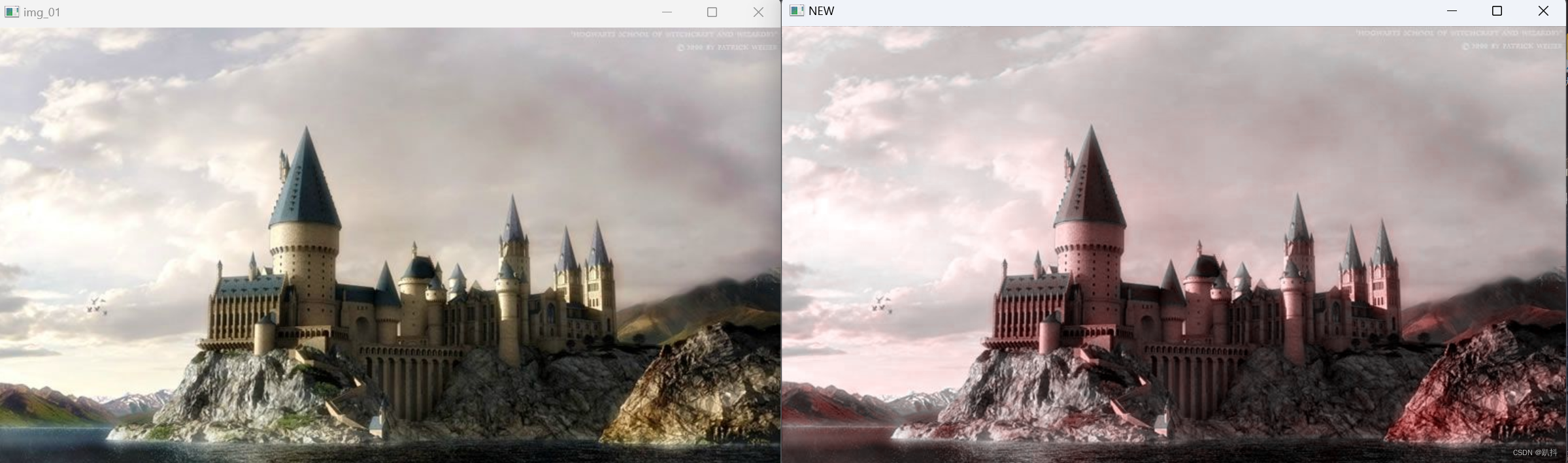
实例12: 只把H通道的值调整为180
首先将图像从BGR色彩空间转换到HSV色彩空间;然后拆分得到HSV图像中的通道;接着让S通道和V通道的值表示不变,把H通道的值调整为180;再接着合并拆分后的通道图像,把这个图像从HSV色彩空间转换到BGR色彩空间;最后显示得到的BGR图像。
import cv2image = cv2.imread("1.jpg", 1) # 读取1.jpg
cv2.imshow("img_01", image) # 显示图像
hsv_image = cv2.cvtColor(image,cv2.COLOR_BGR2HSV) # 将图像从BGR色彩空间转换到HSV色彩空间
h,s,v=cv2.split(hsv_image) # 拆分得到HSV图像中的通道
h[:,:] = 180 # 让S通道和V通道的值表示不变,把H通道的值调整为180
hsv = cv2.merge([h,s,v]) # 合并拆分后的通道图像
new_Image = cv2.cvtColor(hsv,cv2.COLOR_HSV2BGR) # 把这个图像从HSV色彩空间转换到BGR色彩空间
cv2.imshow("NEW",new_Image)
cv2.waitKey()
cv2.destroyAllWindows() # 关闭所有的窗口时,销毁所有窗口
结果如下:
alpha通道
OpenCV在B、G、R三个通道的基础上,又增加了一个A通道,即alpha通道,用于设置图像的透明度。在BGRA色彩空间中,alpha通道在区间[0,255]内取值,其中0表示透明,255表示不透明。
实例13: 调整A通道的值
import cv2bgr_image = cv2.imread("1.jpg", 1) # 读取1.jpg
bgra_image = cv2.cvtColor(bgr_image, cv2.COLOR_BGR2BGRA) # 把图片从BGR色彩空间转换到BGRA色彩空间
b, g, r, a = cv2.split(bgra_image) # 拆分BGRA图像中的通道
a[:, :] = 172 # 将BGRA图像的透明度调整为172(半透明)
bgra_172 = cv2.merge([b, g, r, a]) # 合并拆分后并将透明度调整为172的通道图像
a[:, :] = 0 # 将BGRA图像的透明度调整为0(透明)
bgra_0 = cv2.merge([b, g, r, a]) # 合并拆分后并将透明度调整为0的通道图像
cv2.imwrite("D:/bgra_image.png", bgra_image) # 在D盘根目录下,保存BGRA图像
cv2.imwrite("D:/bgra_172.png", bgra_172) # 在D盘根目录下,保存透明度为172的BGRA图像
cv2.imwrite("D:/bgra_0.png", bgra_0) # 在D盘根目录下,保存透明度为0的BGRA图像
如果使用imshow()方法的话,窗口里显示的图像是相同的。为了显示这3幅图像的不同效果,需要使用imwrite()方法来保存。
相关文章:
【OpenCV入门】第一部分——图像处理基础
本文结构 图像处理的基本操作读取图像imread() 显示图像imshow()waitKey()destroyAllWindows() 保存图像imwrite() 获取图像属性 像素确定像素的位置获取像素的BGR值修改像素的BGR值 色彩空间GRAY色彩空间cvtColor()——从BGR色彩空间转换到GRAY色彩空间 HSV色彩空间从BGR色彩空…...
vue3+ts+tinynce富文本编辑器+htmlDocx+file-saver 配合实现word下载
vue3 请下载html-docx-js-typescript,否则会报错类型问题 //报告导出word import * as htmlDocx from "html-docx-js-typescript";//ts-ignore import { saveAs } from file-saver// 下载文件, const downloadFile (row)> {try {const co…...
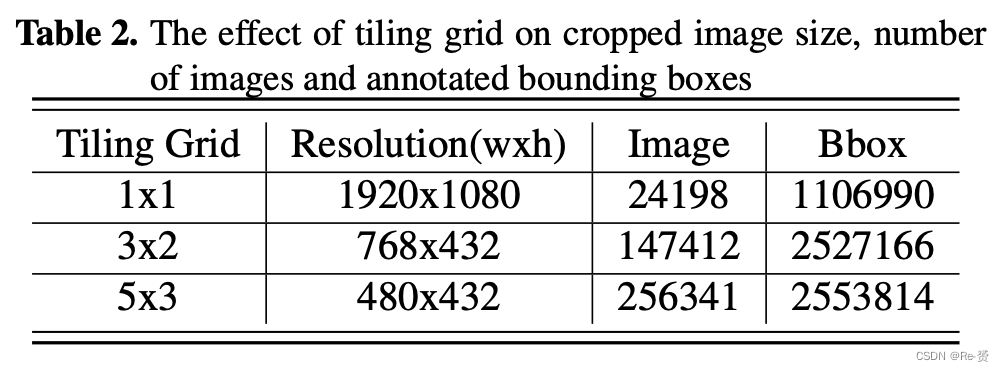
论文阅读 The Power of Tiling for Small Object Detection
The Power of Tiling for Small Object Detection Abstract 基于深度神经网络的技术在目标检测和分类方面表现出色。但这些网络在适应移动平台时可能会降低准确性,因为图像分辨率的增加使问题变得更加困难。在低功耗移动设备上实现实时小物体检测一直是监控应用的…...
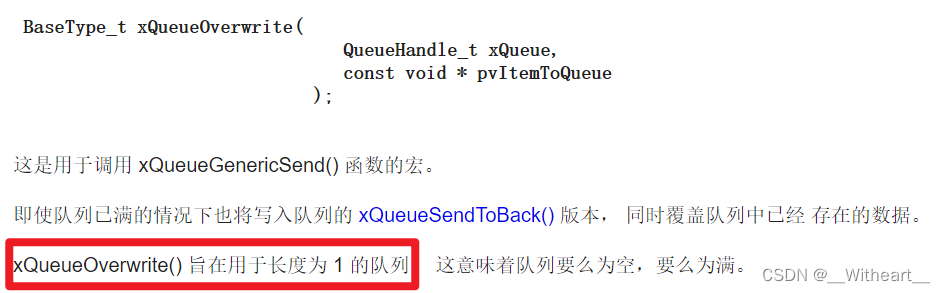
【FreeRTOS】【应用篇】消息队列【下篇】
前言 本篇文章主要对 FreeRTOS 中消息队列的概念和相关函数进行了详解消息队列【下篇】详细剖析了消息队列中发送、接收时队列消息控制块中各种指针的行为,以及几个发送消息和接收消息的函数的运作流程笔者有关于 【FreeRTOS】【应用篇】消息队列【上篇】——队列基…...

芯片技术的崭新时代:探索未来的可能性
引言 芯片作为现代科技领域的核心,扮演着无可替代的角色。从智能手机到数据中心,从医疗设备到智能家居,芯片技术已经深刻地改变了我们的生活。然而,随着技术的不断发展,芯片行业也在经历着一场前所未有的变革。本文将…...

博流RISC-V芯片Eclipse环境搭建
文章目录 1、下载 Eclipse2、导入 bouffalo_sdk3、编译4、烧录5、使用ninja编译 之前编译是通过 VSCode 编译,通过手工输入 make 命令编译,我们也可以通过 Eclipse 可视化 IDE 来编译、烧录。 1、下载 Eclipse 至 Eclipse 官网 https://www.eclipse.org…...

智慧水产养殖方案,守护养殖水产品安全!
水产品在人们的饮食文化中占据着举足轻重的地位,更是人们摄入蛋白质的重要来源。因此,保障食品安全,提升养殖水产品的品质至关重要然。而传统的人工观察水产养殖方式较为单一,难以及时发现水质问题和投喂情况,容易导致…...
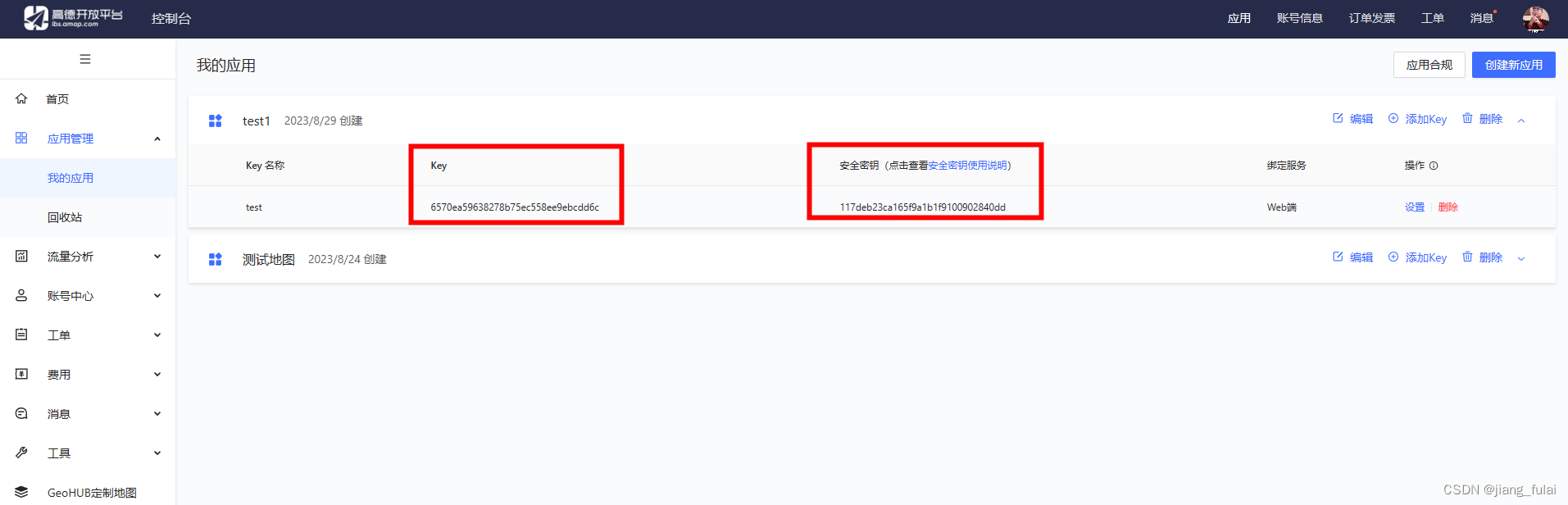
前端vue引入高德地图入门教程
距离上一篇关于前端项目中使用高德地图的文章已经将近5年之久, 这是我的第一篇关于高德地图的文章 这期间前端技术日新月异,5年前JQuery还如日中天,如今已经销声匿迹,很少有公司招聘还在要求JQuery,更多的是Vue、React…...
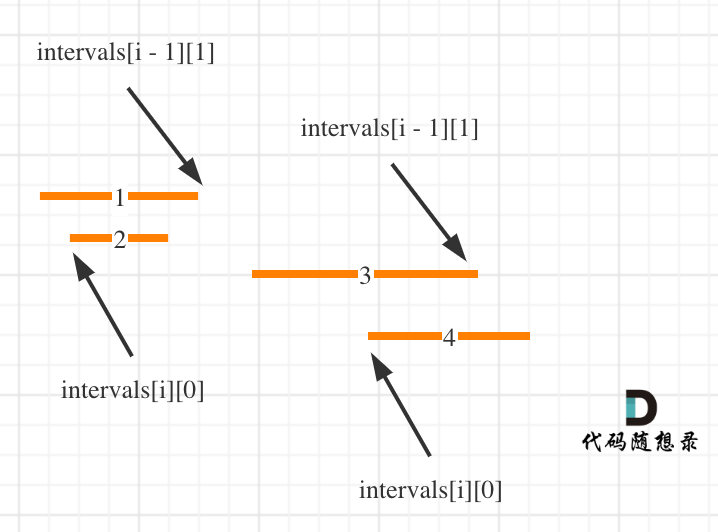
【LeetCode题目详解】第八章 贪心算法 part05 435. 无重叠区间 763.划分字母区间 56. 合并区间 (day36补)
本文章代码以c为例! 一、力扣第435题:无重叠区间 题目: 给定一个区间的集合 intervals ,其中 intervals[i] [starti, endi] 。返回 需要移除区间的最小数量,使剩余区间互不重叠 。 示例 1: 输入: intervals [[1,…...

数据的语言:学习数据可视化的实际应用
数据可视化应该学什么?这是一个在信息时代越来越重要的问题。随着数据不断增长和积累,从社交媒体到企业业务,从科学研究到医疗健康,我们都面临着海量的数据。然而,数据本身往往是冰冷、抽象的数字,对于大多…...

【Flutter】Flutter简介
Flutter是Google开发的一款用于构建高性能、高保真移动应用程序的开源UI工具包。它允许开发人员使用Dart语言来构建跨平台的移动应用程序,并提供了丰富的UI组件、动画效果和手势识别等功能。 以下是Flutter入门的一些详细介绍: Flutter概述 Flutter是一…...

做区块链卡牌游戏有什么好处?
区块链卡牌游戏是一种基于区块链技术的创新性游戏形式,它将传统的卡牌游戏与区块链技术相结合,实现了去中心化、数字化资产的交易和收集。这种新型游戏形式正逐渐在游戏行业引起了广泛的关注和热潮。本文将深入探讨区块链卡牌游戏的定义、特点以及其在未…...

C语言每日一练------Day(5)
本专栏为c语言练习专栏,适合刚刚学完c语言的初学者。本专栏每天会不定时更新,通过每天练习,进一步对c语言的重难点知识进行更深入的学习。 今日练习题关键字:错误的集合 密码检查 💓博主csdn个人主页:小小u…...
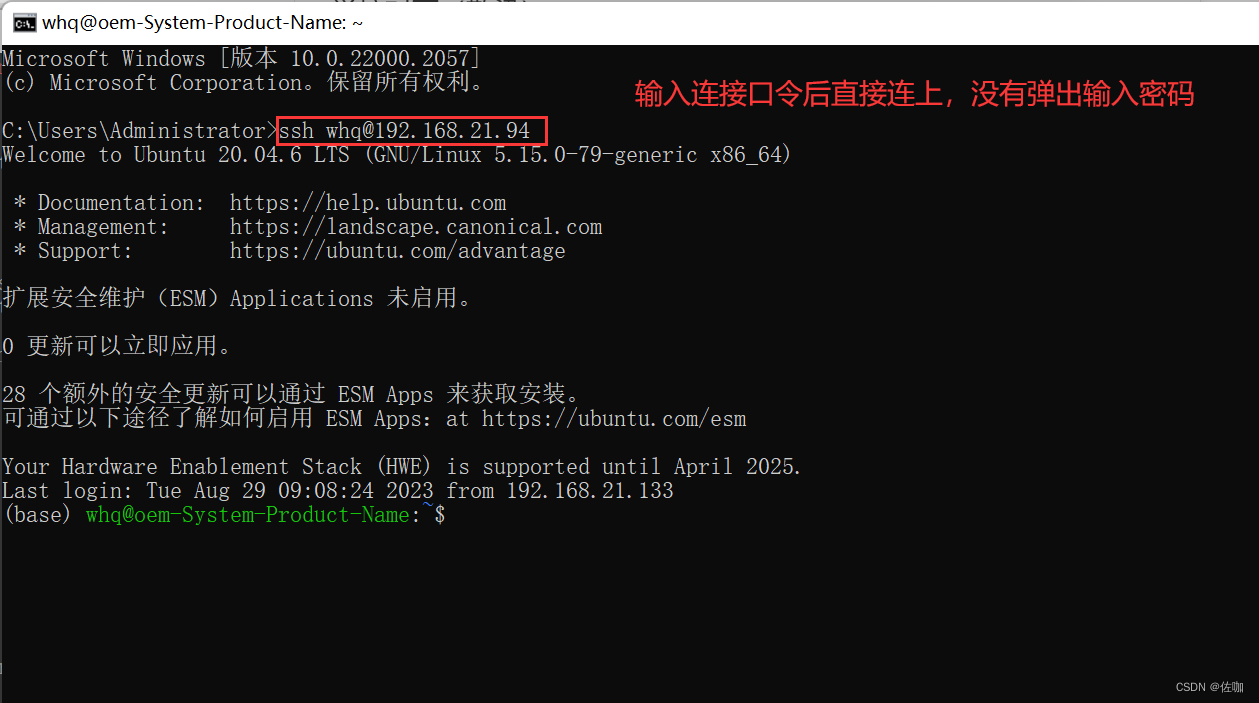
(Windows )本地连接远程服务器(Linux),免密码登录设置
在使用VScode连接远程服务器时,每次打开都要输入密码,以及使用ssh登录或其它方法登录,都要本地输入密码,这大大降低了使用感受,下面总结了免密码登录的方法,用起来巴适得很,起飞。 目录 PowerSh…...
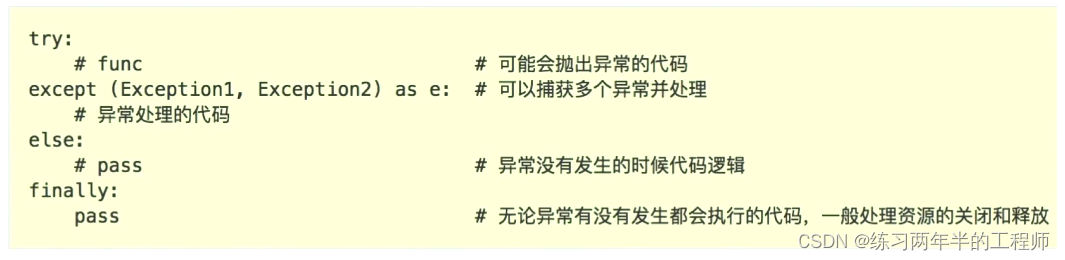
Python 面试:异常处理机制
格式: 继承Exception实现自定义异常。 注意:这里是继承Exception类,而不是BaseException类,因为继承BaseException可能会导致捕获不到自定义异常。 class MyException(Exception):passtry:raise MyException(my salary is too…...
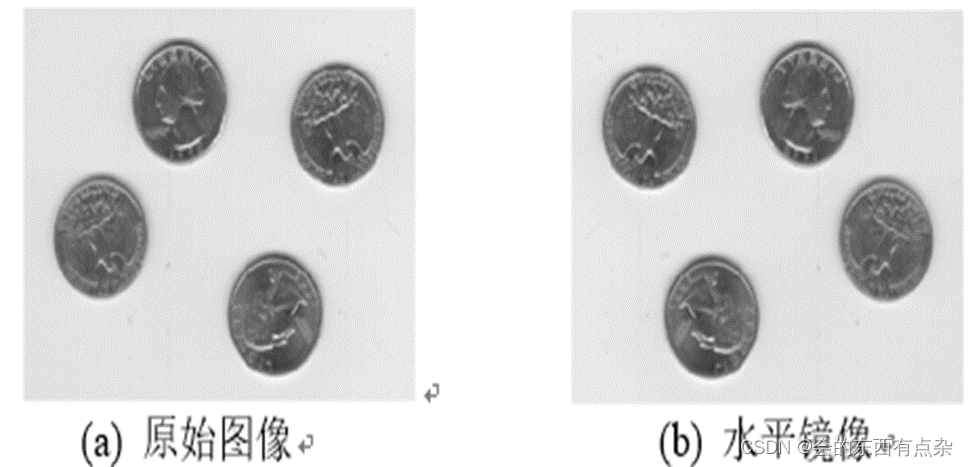
Matlab图像处理-水平镜像
镜像变换 镜像变换又常称为对称变换,它可以分为水平对称、垂直对称等多种变换。对称变换后,图像的宽和高不变。 图像的镜像分为两种垂直镜像和水平镜像。 水平镜像即将图像左半部分和右半部分以图像竖直中轴线为中心轴进行对换; 竖直镜像…...
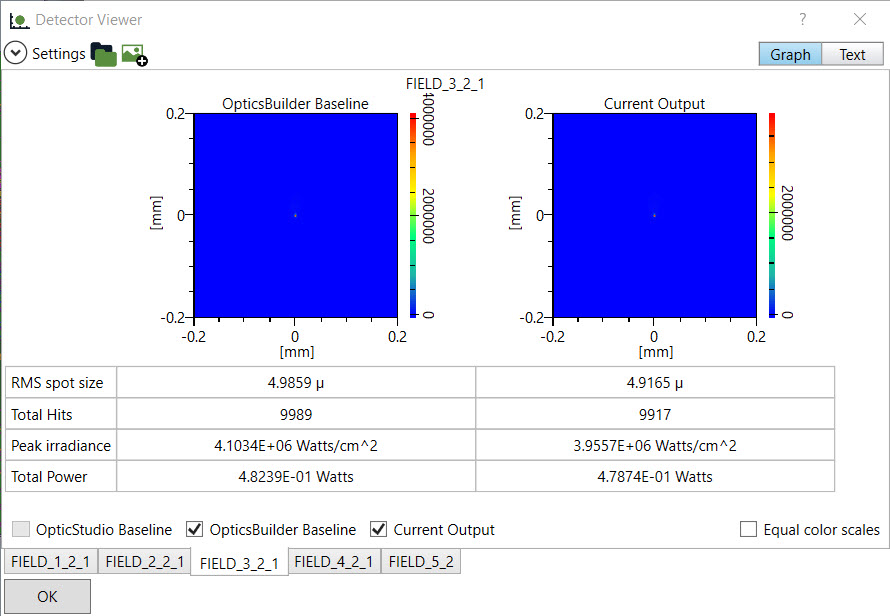
Ansys Zemax | 手机镜头设计 - 第 2 部分:使用 OpticsBuilder 实现光机械封装
本文是3篇系列文章的一部分,该系列文章将讨论智能手机镜头模块设计的挑战,从概念、设计到制造和结构变形的分析。本文是三部分系列的第二部分。概括介绍了如何在 CAD 中编辑光学系统的光学元件以及如何在添加机械元件后使用 Zemax OpticsBuilder 分析系统…...

【GPT,Flask】用Python Flask结合OpenAI的GPT API构建一个可自主搭建的内容生成应用网站
【背景】 自己构建模型并进行训练需要很高的知识,技能和资源门槛。如今,通过OpenAI提供的API,则可以快速通过GPT能力构建可以提供内容生成服务的在线网站。这套框架可以提供给用户,用户可以利用该框架在自己的环境(比如自己的公司内)构建内容生成服务。你也可以自己上线…...

vue + electron
node 版本 v14.19.3 npm 版本 6.14.17 要是node-sass报错执行命令: npm uninstall node-sass sass-loader npm i node-sass4.14.1 sass-loader7.3.1 --save -dev首先安装依赖 npm install electron npm install electron-packagerelectronRun.js放在根目录下 con…...

spring中LocalDateTime 转成字符串的时候注意事项
ApiOperation("查询课程发布信息") ResponseBody GetMapping("/r/coursepublish/{courseId}") public CoursePublish getCoursepublish(PathVariable("courseId") Long courseId) { CoursePublish coursePublish coursePublishService.getC…...
表面的差分电荷密度图)
保姆级教程:用VASP和VESTA搞定CO吸附在Pt(111)表面的差分电荷密度图
从零开始:CO-Pt(111)体系差分电荷密度计算全流程解析 在催化反应机理研究中,差分电荷密度分析犹如一把精密的手术刀,能够清晰揭示分子与催化剂表面之间的电子"对话"。对于刚踏入计算催化领域的研究者而言,掌握这项技能不…...

Phillips SDM01 0940860010091 003149电子控制单元
Phillips SDM01 0940860010091 003149 是一款飞利浦出品的电子控制单元,专用于工业设备或医疗系统的逻辑控制与信号处理。中间:15条产品特点SDM01 采用飞利浦高品质元器件,稳定性好。具备多路数字量输入输出通道,扩展性强。处理速…...

ADAU1701 DSP资源极限探索:从31段EQ到内存溢出,手把手教你做性能压力测试
ADAU1701 DSP资源极限探索:从31段EQ到内存溢出的性能压力测试方法论 在音频处理领域,ADAU1701作为一款经典的DSP芯片,其资源分配与性能边界一直是开发者关注的焦点。当客户提出"能否实现90段EQ"这类需求时,仅凭数据手册…...

GNSS模块教程:大夏龙雀 DX-GP21,从硬件接线到 NMEA 数据解析
在物联网、无人机、精准农业等场景中,高精度定位是核心需求。深圳大夏龙雀科技的 DX-GP21 作为一款多模多频 GNSS 模块,支持北斗、GPS、Galileo 等多系统联合定位,定位精度<1.0m,兼具低功耗、小尺寸特性,性…...

复旦微FM33FR0xx开发板实战:从零构建低功耗电容触摸应用
1. 项目概述:从一块开发板说起最近在捣鼓智能家居的小玩意儿,想找个带触摸功能又够省电的MCU,正好看到了复旦微电子新出的FM33FR0xx系列开发套件。这板子到手玩了一阵,感觉挺有意思,它不单单是块核心板,还配…...

终极性能释放指南:3步解锁暗影精灵完整潜力,告别臃肿官方软件
终极性能释放指南:3步解锁暗影精灵完整潜力,告别臃肿官方软件 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 你是否厌倦了官方Ome…...

负载型聚丙烯酰胺PAM水凝胶:构筑多功能智能材料的新范式
名称:负载型聚丙烯酰胺(PAM)水凝胶 负载型聚丙烯酰胺(PAM)水凝胶作为一种先进的功能高分子材料,正以其独特的网络结构和可调控的物理化学性质,在环境治理、生物医药及智能传感等领域展现出巨大的…...

学习刷题公众号管理系统
功能特点支持视频、音频、图文三种课程形式,按知识点分类管理,支持自由添加和编辑课程章节。课程可设置为免费或付费模式,支持VIP会员免费学习权限设置。提供智能组卷功能,学员可按知识点自主组卷,系统从题库中随机抽题…...
)
Ubuntu 20.04桌面管理器搞乱了?别慌,手把手教你找回原版GNOME桌面(附LightDM/GDM3切换命令)
Ubuntu 20.04桌面环境异常修复指南:从混乱到秩序 系统启动后突然发现熟悉的GNOME桌面消失了,取而代之的是一个陌生的登录界面和错乱的窗口布局——这可能是许多Ubuntu新手在尝试自定义系统时遇到的噩梦。本文将带你深入理解Linux显示管理器的运作机制&am…...

Faster-Whisper-GUI:高效本地语音识别与字幕生成终极指南
Faster-Whisper-GUI:高效本地语音识别与字幕生成终极指南 【免费下载链接】faster-whisper-GUI faster_whisper GUI with PySide6 项目地址: https://gitcode.com/gh_mirrors/fa/faster-whisper-GUI 在人工智能语音技术快速发展的今天,本地化语音…...