学习笔记:ROS使用经验(ROS报错)
报错:进程崩溃
] process has died [pid 734, exit code -5, cmd /root/catkin_ws/devel/lib/pose_graph/pose_graph __name:=pose_graph __log:=/root/.ros/log/31b0ae1c-3295-11ee-bda9-02429b5737dc/pose_graph-5.log]. log file: /root/.ros/log/31b0ae1c-3295-11ee-bda9-02429b5737dc/pose_graph-5*.log
根据提供的信息,该错误日志表明一个名为pose_graph的进程在运行时意外退出了。具体错误代码为-5,这表示进程被操作系统强制终止。
要解决这个问题,你可以查看日志文件"/root/.ros/log/31b0ae1c-3295-11ee-bda9-02429b5737dc/pose_graph-5.log",其中可能包含有关进程退出的更多详细信息。该日志文件可能会显示导致进程崩溃的错误消息或异常情况。
在分析这些信息之后,你可以尝试修复代码或调整配置,以解决导致该进程异常退出的问题。可能的原因包括代码错误、依赖项问题、内存溢出或其他系统资源问题等。如果无法确定具体原因,你可以尝试在相关技术社区或论坛上寻求帮助,以获取更多专业建议和支持。
报错:重名功能包
Multiple packages found with the same name "pose": - show_path/my_pose1--show_path/pose2
这个报错表示在你的ROS工作空间中有两个具有相同包名"pose_graph"的包,分别是"vins-mono/my_reg"和"vins-mono/pose_graph"。由于包名必须在整个ROS工作空间是唯一的,因此需要解决这个命名冲突问题。
要解决这个问题,你可以采取以下步骤:
1.在终端中进入ROS工作空间的根目录:
cd ~/catkin_ws
2.检查src目录下的包是否存在重复的包名,执行以下命令:
find src -name package.xml | xargs grep -ri "<name>pose_graph<\/name>"
这将搜索所有package.xml文件,并列出其中指定了包名为"pose"的文件路径。如果有多个结果,说明存在重复的包名。
确定哪个包是你想要保留的,并更改另一个包的包名或删除它。你可以进入对应的包目录,并修改package.xml中的 <name>标签来更改包名。例如,如果你想保留"show_path/my_pose1",则可以将"show_path/pose2"改成另一个唯一的名称。
在修改包名后,返回到ROS工作空间的根目录,并重新编译工作空间:
cd ~/catkin_ws
catkin_make
请注意,为了避免将来的命名冲突问题,确保你的包名在整个ROS工作空间是唯一的。并且在创建新的包时,最好采用具有明确上下文的包名,以避免与其他包发生冲突。
相关文章:
)
学习笔记:ROS使用经验(ROS报错)
报错:进程崩溃 ] process has died [pid 734, exit code -5, cmd /root/catkin_ws/devel/lib/pose_graph/pose_graph __name:pose_graph __log:/root/.ros/log/31b0ae1c-3295-11ee-bda9-02429b5737dc/pose_graph-5.log]. log file: /root/.ros/log/31b0ae1c-3295-11…...
)
设计模式二十四:访问者模式(Visitor Pattern)
用于将数据结构与数据操作分离,使得可以在不修改数据结构的情况下,定义新的操作。访问者模式的核心思想是,将数据结构和操作进行解耦,从而使得新增操作时不必修改数据结构,只需添加新的访问者。主要目的是在不改变数据…...
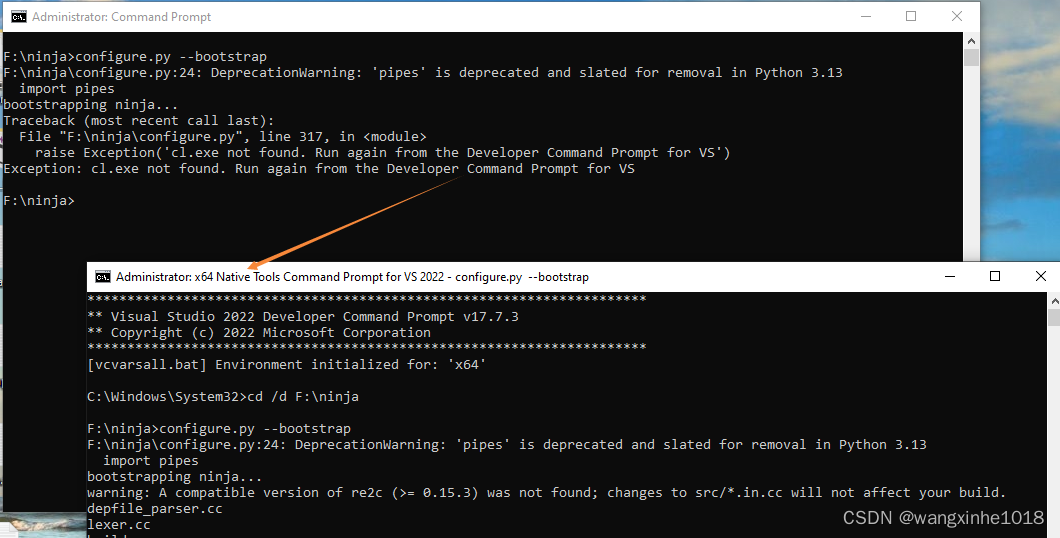
使用gn+Ninja构建项目
使用下载编译好的gn和ninja报错 先下载了gn的源码[gn.googlesource.com/gn],然后编译报错,就直接下载了了编译号的gn和Ninja,然后写了Helloworld应用的BUILD.gn,然后将"gn\examples\simple_build\build"拷贝至当前目录…...
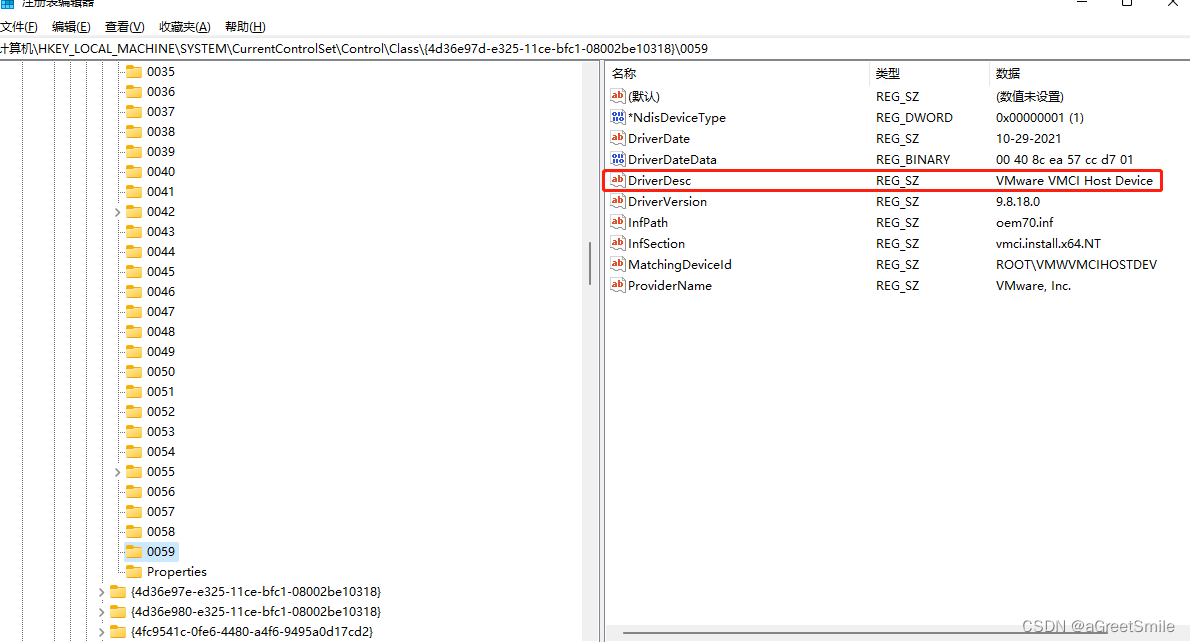
VMware虚拟机连不上网络
固定ip地址 进入网络配置文件 cd /etc/sysconfig/network-scripts 打开文件 vi ifcfg-ens33 编辑 BOOTPROTO设置为static,有3个值(decp、none、static) BOOTPROTO"static" 打开网络 ONBOOT"yes" 固定ip IPADDR1…...
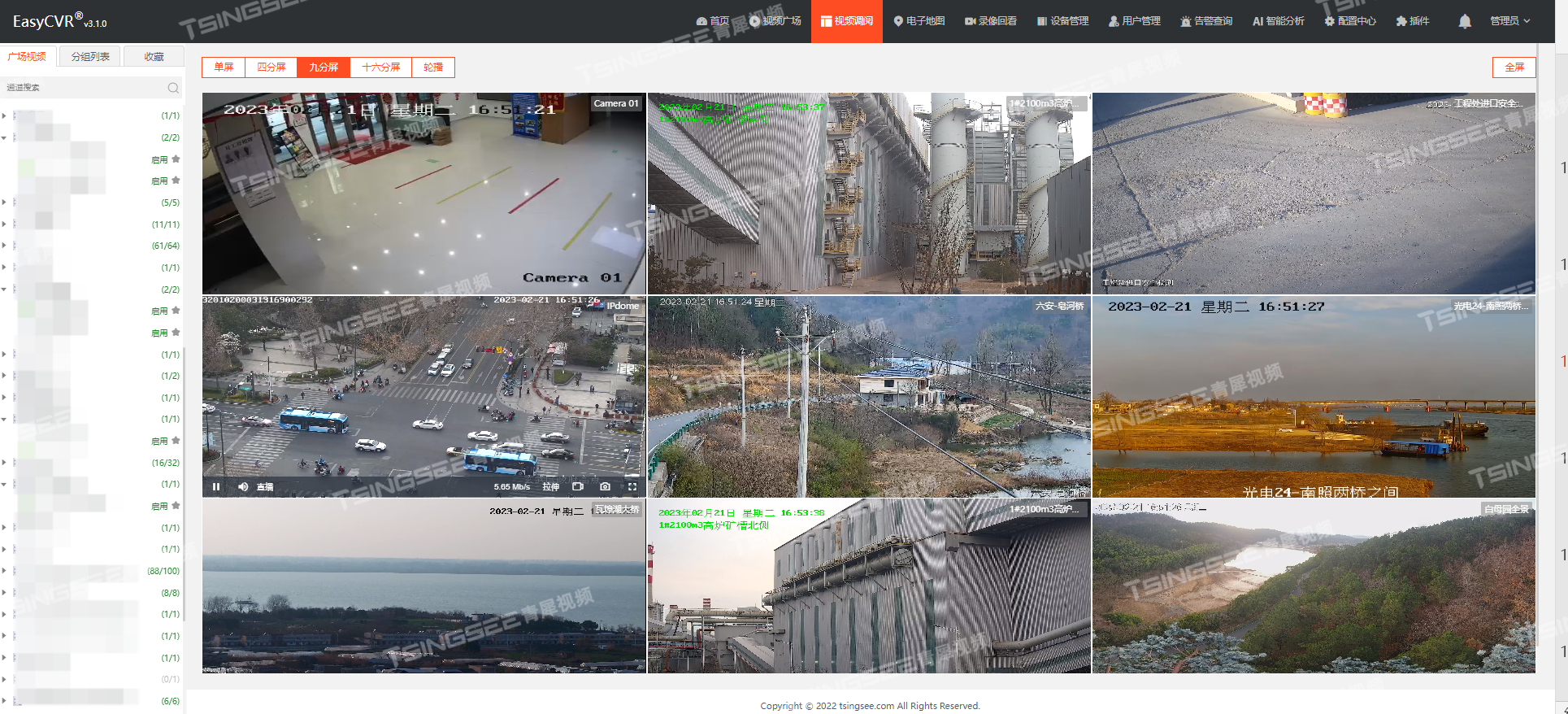
安防视频监控/视频集中存储/云存储平台EasyCVR平台无法取消共享通道该如何解决?
视频汇聚/视频云存储/集中存储/视频监控管理平台EasyCVR能在复杂的网络环境中,将分散的各类视频资源进行统一汇聚、整合、集中管理,实现视频资源的鉴权管理、按需调阅、全网分发、云存储、智能分析等,视频智能分析平台EasyCVR融合性强、开放度…...

算法通关村-----如何基于数组和链表实现栈
实现栈的基本方法 push(T t)元素入栈 T pop() 元素出栈 Tpeek() 查看栈顶元素 boolean isEmpty() 栈是否为空 基于数组实现栈 import java.util.Arrays;public class ArrayStack<T> {private Object[] stack;private int top;public ArrayStack() {this.stack new…...
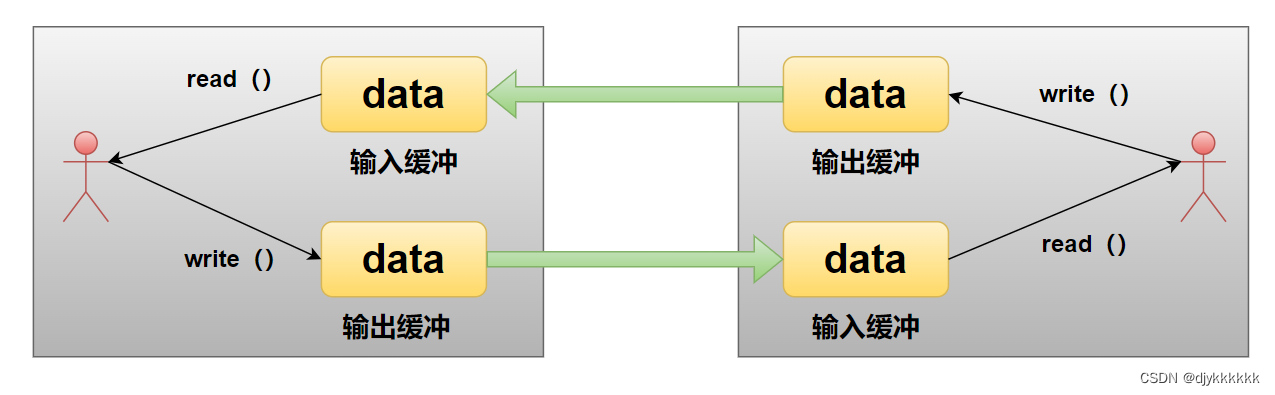
day-05 TCP半关闭 ----- DNS ----- 套接字的选项
一、优雅的断开套接字连接 之前套接字的断开都是单方面的。 (一)基于TCP的半关闭 Linux的close函数和windows的closesocket函数意味着完全断开连接。完全断开不仅不能发送数据,从而也不能接收数据。在某些情况下,通信双方的某一方…...

区块链金融项目怎么做?
区块链技术的兴起引发了金融领域的变革,为金融行业带来了前所未有的机遇与挑战。在这个快速发展的领域中,如何在区块链金融领域做出卓越的表现?本文将从专业性和思考深度两个方面,探讨区块链金融的发展路径,并为读者提…...

Redis与数据库保持一致
参考链接 先更新数据库,再更新redis 存在漏洞,如果更新Redis失败,仍然会导致不一致 先删Redis,再更新数据库并同步数据到Redis 存在漏洞,多线程情况下,线程1删除redis后,还是有可能被其他线程读取旧的数据…...
idea中vue项目 npm安装插件后node modules中找不到
从硬盘中重新加载一下...

已知两地经纬度,计算两地直线距离
文章目录 1 原理公式2 代码实现2.1 JavaScript2.2 C2.3 Python2.4 MATLAB 1 原理公式 在地球上,计算两点之间的直线距离通常使用地理坐标系(例如WGS84)。计算两地直线距离的公式是根据经纬度之间的大圆距离(Great Circle Distanc…...
我想开通期权?如何开通期权账户?
场内期权的合约由交易所统一标准化定制,大家面对的同一个合约对应的价格都是一致的,比较公开透明,期权开户当天不能交易的,期权开户需要满足20日日均50万及半年交易经验即可操作,下文科普我想开通期权?如何…...
ChatGPT对软件测试的影响
ChatGPT 是一个经过预训练的 AI 语言模型,可以通过聊天的方式回答问题,或者与人闲聊。它能处理的是文本类的信息,输出也只能是文字。它从我们输入的信息中获取上下文,结合它被训练的大模型,进行分析总结,给…...
minion在ubuntu上的搭建步骤
在Ubuntu上搭建MinIO可以按照以下步骤进行: 下载MinIO服务器二进制文件: 通过浏览器访问 https://min.io/download 或使用以下命令获取最新的MinIO二进制文件:wget https://dl.min.io/server/minio/release/linux-amd64/minio赋予二进制文件…...
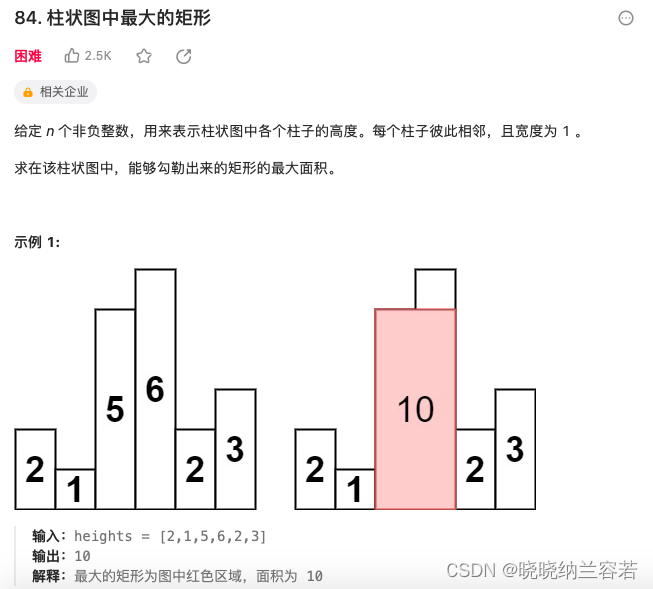
Leetcode刷题笔记--Hot31-40
1--颜色分类(75) 主要思路: 快排 #include <iostream> #include <vector>class Solution { public:void sortColors(std::vector<int>& nums) {quicksort(nums, 0, nums.size()-1);}void quicksort(std::vector<int…...
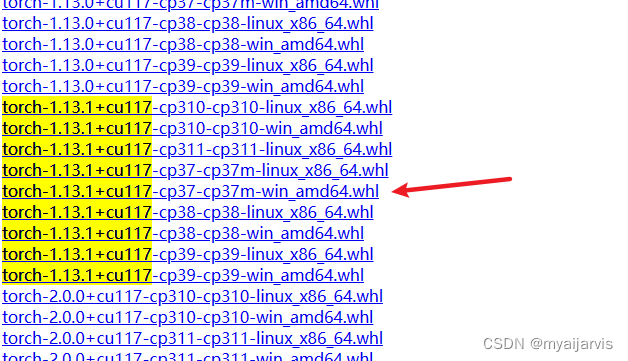
【Python】环境配置,【Pytorch】GPU版本安装
总结: 使用conda新建切换环境,然后使用pip安装卸载包 【python】pip conda_conda list没有pytorch_myaijarvis的博客-CSDN博客 pip换源 https://blog.csdn.net/maotenghua/article/details/104188086 在当前用户目录下创建pip目录,即C:\U…...
)
BEVFusion复现 (Ubuntu RTX3090)
https://github.com/ADLab-AutoDrive/BEVFusion 1.环境安装 我的机器是RTX3090,CUDA11.1 1.创建虚拟环境 conda create -n bevfusion python3.8.3 2.安装PyTorch 和 torchvision pip install torch1.8.0cu111 torchvision0.9.0cu111 torchaudio0.8.0 -f https://…...

Python基础知识学习与回顾
Python学习 Python基本语法 标识符 标识符由数字、字符串、下划线构成。 注意事项: 标识符不以数字开头区分大小写下划线开头的标识符具有特殊意义保留字,Python保留了一些关键字,这些关键字都是通过小写字母进行保存。 下划线开头的特…...
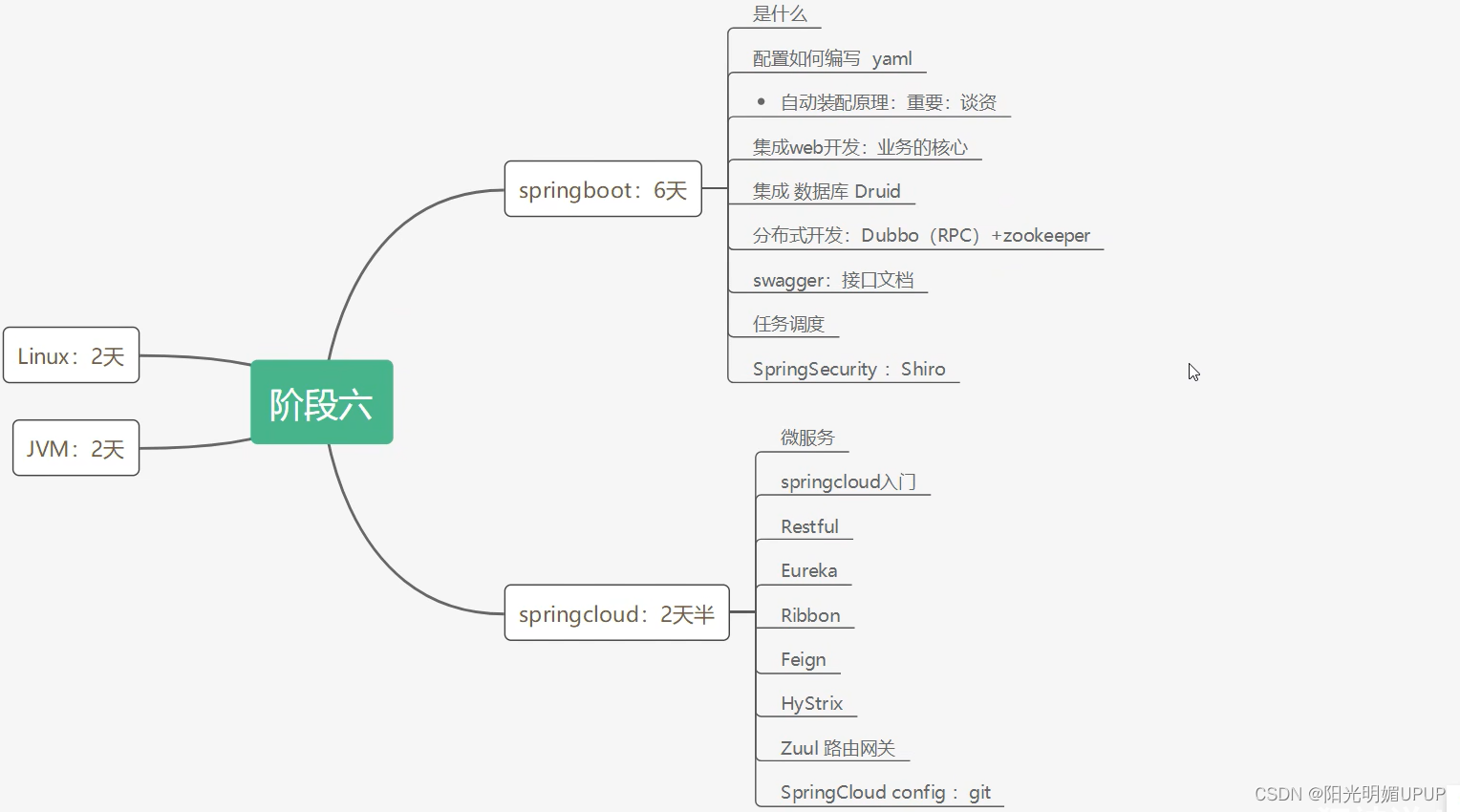
SpringBoot笔记——(狂神说)——待续
路线 javase: OOPmysql:持久化 htmlcssjsjquery框架:视图,框架不熟练,css不好; javaweb:独立开发MVC三层架构的网站了∶原始 ssm :框架:简化了我们的开发流程,配置也开始较为复杂; war: tomcat运行 spring再简化: SpringBoot - jar:内嵌tomca…...

Linux TCP编程流程
一、TCP编程流程 TCP 提供的是面向连接的、可靠的、字节流服务。TCP的服务器端和客户端编程流程如下: 1.socket()方法 用来创建一个套接字,有了套接字就可以通过网络进行数据的收发。这也是为什么进行网络通信的程序首先要创建一个套接字。创建套接字时…...

AI Agent Runtime 正在成为新基础设施层
1. 这不是新赛道,而是 runtime 层的“操作系统时刻”正在重演你打开手机看到新闻标题《Anthropic Just Shipped the Layer That’s Already Going to Zero》,第一反应可能是:又一个大模型公司搞出了什么黑科技?但如果你真花十分钟…...

手写NumPy版RBM:从能量函数到吉布斯采样的可调试实现
1. 项目概述:这不是又一个“RBM扫盲帖”,而是一次亲手拆解神经网络祖师爷级模型的实操复盘Restricted Boltzmann Machine(受限玻尔兹曼机),简称RBM,不是教科书里那个被反复引用却没人真去跑通的抽象符号&am…...

C#从零开始学习笔记---第八天
大家好,欢迎来到我的频道,这里给大家先道个歉,这两天脚崴了,极度不适,所以昨天就没更新,今天的话确实也还挺不舒服的,所以今天我们的内容也不会有很多,希望大家谅解一下。那么接下来…...

为什么你的ElevenLabs挪威语输出总被用户投诉“像AI朗读”?——基于217小时母语者A/B测试的5个声学参数调优阈值
更多请点击: https://intelliparadigm.com 第一章:挪威语语音“AI感”感知机制与母语者听觉认知模型 当挪威语母语者听到由现代TTS系统(如Coqui TTS或Azure Neural TTS)生成的挪威语语音时,常产生一种微妙的“AI感”—…...

ARM工业平板在机器人示教器控制系统中的应用与实现
1. 项目概述:ARM工业平板如何重塑机器人示教体验在工业机器人的世界里,示教器(Teach Pendant,简称TP)是连接操作员与机械臂的“神经中枢”。过去,这个角色通常由专用、封闭的硬件设备扮演,它们功…...

2026免费在线去水印软件对比推荐|五款工具测评,快速去掉各平台水印
在日常内容创作和素材整理中,很多人都会遇到水印的问题。无论是从抖音、快手、小红书还是B站保存视频,亦或是收集网络图片素材,几乎所有平台的内容都会附带水印。这些水印虽然有利于版权保护,但对于正常的个人使用、内容再创作或学…...

在线网盘系统:基于 Spring Boot 的文件存储、分类管理与分享预览实践
在线网盘系统:基于 Spring Boot 的文件存储、分类管理与分享预览实践 项目概述 在线网盘系统的核心目标,是把“文件存储”升级为“文件管理 文件预览 文件分享”的一体化平台。相比只支持上传下载的简易文件系统,这个项目进一步补齐了分类管…...
)
Midjourney单色调风格失效诊断图谱(含8种典型失败案例+对应--no、--style、--seed三重校准方案)
更多请点击: https://intelliparadigm.com 第一章:Midjourney单色调风格失效诊断图谱(含8种典型失败案例对应--no、--style、--seed三重校准方案) 单色调(Monochrome)图像生成在Midjourney中高度依赖提示词…...
)
自指系统与算术障碍的跨领域猜想:封闭认知框架下的几何-物理-计算统一理论研究(世毫九实验室原创研究)
自指系统与算术障碍的跨领域猜想:封闭认知框架下的几何-物理-计算统一理论研究(世毫九实验室原创研究) 作者:方见华 单位:世毫九实验室 摘要 本研究提出了一个关于"自指系统与算术障碍的跨领域猜想"的理论框…...

物理标签退场,视觉原生上位:UWB vs 镜像视界无感定位・空间智能重构
物理标签退场,视觉原生上位:UWB vs 镜像视界无感定位・空间智能重构在空间智能加速重构物理世界的当下,全域感知技术正经历一场从“物理标签”到“视觉原生”的底层范式革命。长期以来,以UWB(超宽带)为代表…...