DJI 无人机 Onboard SDK ROS 功能包demo运行
DJI 无人机 Onboard SDK ROS 功能包demo运行
- demo功能
- 准备测试环境
- 运行 dji sdk 节点
- 运行 demo 节点
- 自动飞行任务
- 航点自动飞行
- 兴趣点环绕自动飞行
- 飞行控制
- 本地坐标位置控制
搭建好 Onboard SDK ROS 的开发环境后,功能包自身具备一些写好的demo功能案例

dji sdk 的节点在dji_sdk文件夹中
demo的功能案例则在dji_sdk_demo文件夹中
demo功能
具体的demo功能可以查看文件夹内的CMakeLists.txt文件
通过名称可以看出其功能,总结如下:
demo_mission 自动飞行任务
add_executable(demo_missionsrc/demo_mission.cpp)
demo_camera_gimbal 相机云台控制
add_executable(demo_camera_gimbalsrc/demo_camera_gimbal.cpp )
demo_mfio 多功能IO控制
add_executable(demo_mfiosrc/demo_mfio.cpp)
demo_flight_control 飞行控制
add_executable(demo_flight_controlsrc/demo_flight_control.cpp)
demo_mobile_comm msdk通信
add_executable(demo_mobile_commsrc/demo_mobile_comm.cpp)
demo_payload_comm psdk通信
add_executable(demo_payload_commsrc/demo_payload_comm.cpp)
demo_local_position_control 本地坐标位置控制
add_executable(demo_local_position_controlsrc/demo_local_position_control.cpp)
demo_time_sync 时间硬件同步功能
add_executable(demo_time_syncsrc/demo_time_sync.cpp)
demo_stereo_depth_perception 深度相机感知
add_executable(demo_stereo_depth_perceptionsrc/demo_stereo_depth_perception.cpp${STEREO_UTILITY_SRC_FILE} )
demo_stereo_object_depth_perception 深度相机目标感知
add_executable(demo_stereo_object_depth_perceptionsrc/demo_stereo_object_depth_perception.cpp${STEREO_UTILITY_SRC_FILE} )
在模拟器环境下,可以测试
- 自动飞行任务
- 飞行控制
- 本地坐标位置控制
准备测试环境
连接A3飞控usb口至电脑,打开 DJI Assistan2
开启模拟器

运行 dji sdk 节点
roslaunch dji_sdk sdk.launch
终端输出如下:
节点运行信息
NODES
/
dji_sdk (dji_sdk/dji_sdk_node)
auto-starting new master
process[master]: started with pid [5812]
ROS_MASTER_URI=http://localhost:11311
setting /run_id to 93cf1500-a697-11ed-bf42-df9474278202
process[rosout-1]: started with pid [5822]
started core service [/rosout]
process[dji_sdk-2]: started with pid [5825]
开启串口
STATUS/1 @ init, L55: Attempting to open device /dev/ttyUSB0 with baudrate 921600…
STATUS/1 @ init, L65: …Serial started successfully.
读取无人机设备信息
STATUS/1 @ parseDroneVersionInfo, L727: Device Serial No. = 0670169082
STATUS/1 @ parseDroneVersionInfo, L729: Hardware = A3
STATUS/1 @ parseDroneVersionInfo, L730: Firmware = 3.3.8.47
ERRORLOG/1 @ initVirtualRC, L1103: Virtual RC is not supported on this platform!
激活信息
STATUS/1 @ activate, L1313: version 0x303082F
STATUS/1 @ activate, L1326: Activation successful
检查订阅功能
STATUS/1 @ verify, L244: Verify subscription successful.
STATUS/1 @ initGimbal, L890: Checking if gimbal is connected …
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=50, nTopics=1.
STATUS/1 @ removePackage, L468: Remove package 0 successful.
STATUS/1 @ initGimbal, L934: Gimbal not mounted!
[ INFO] [1675740553.755751972]: drone activated
[ INFO] [1675740553.778064095]: Use data subscription to get telemetry data!
[ INFO] [1675740553.778079475]: align_time_with_FC set to false. We will use ros time to time stamp messages!
STATUS/1 @ verify, L244: Verify subscription successful.
订阅不同数据
STATUS/1 @ startPackage, L350: Start package 2 result: 0.
STATUS/1 @ startPackage, L352: Package 2 info: freq=100, nTopics=3.
STATUS/1 @ startPackage, L350: Start package 1 result: 0.
STATUS/1 @ startPackage, L352: Package 1 info: freq=50, nTopics=14.
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=5, nTopics=1.
STATUS/1 @ removePackage, L468: Remove package 0 successful.
STATUS/1 @ startPackage, L350: Start package 0 result: 0.
STATUS/1 @ startPackage, L352: Package 0 info: freq=5, nTopics=12.
STATUS/1 @ startPackage, L350: Start package 3 result: 0.
STATUS/1 @ startPackage, L352: Package 3 info: freq=400, nTopics=1.
运行 demo 节点
自动飞行任务
rosrun dji_sdk_demo demo_mission
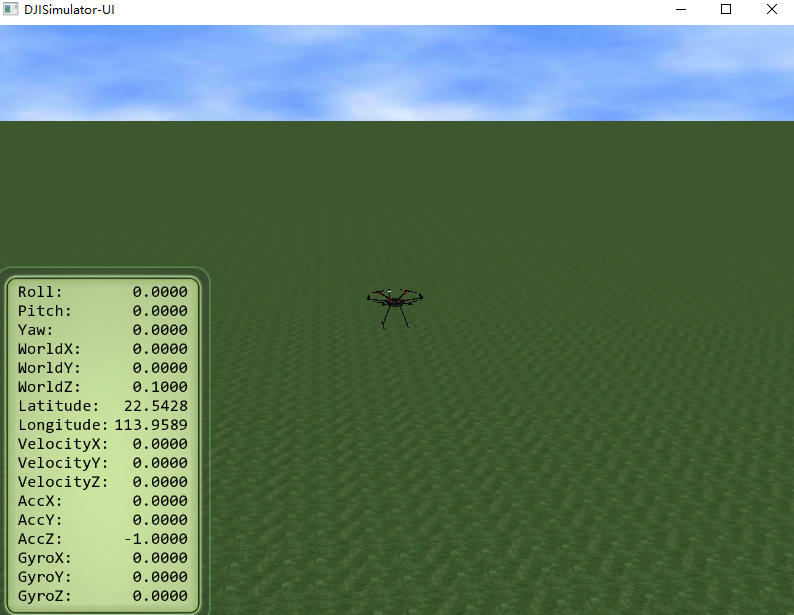
直接运行终端出现如下, 激活成功并且成功获得SDK的控制权
需要输入命令,选择运行的任务,有效命令为a和b,
- a 为 航点任务,无人机会生成几个航点,然后完成自动飞行,结束后在最后一个航点处悬停
- b 为 兴趣点任务,无人机生成一个兴趣点,然后绕该点环绕飞行
[ INFO] [1675740815.554077620]: Activated successfully
[ INFO] [1675740815.566534458]: Obtain SDK control Authority successfully
| Available commands: |
| [a] Waypoint Mission |
| [b] Hotpoint Mission |
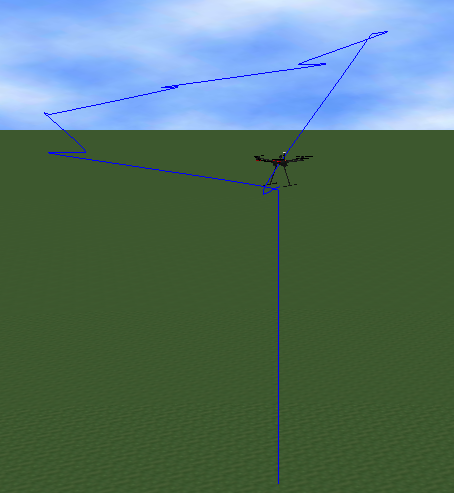
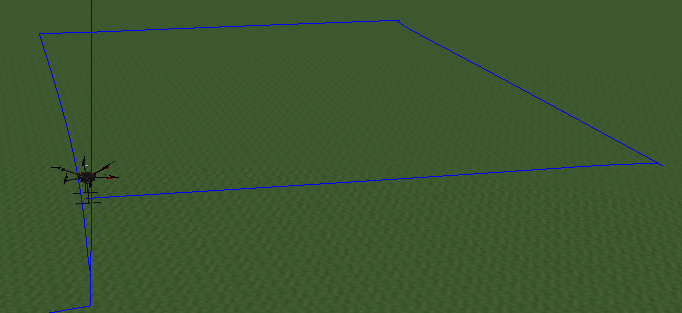
航点自动飞行
选择a后
会根据当前位置生成8个航点
a
[ INFO] [1675740828.523351999]: Creating Waypoints…
[ INFO] [1675740828.523385537]: Waypoint created at (LLA): 22.542813 113.958902 10.000000
[ INFO] [1675740828.523424518]: Uploading Waypoints…
[ INFO] [1675740828.523438455]: Waypoint created at (LLA): 22.542813 113.958902 10.000000
[ INFO] [1675740828.523454862]: Waypoint created at (LLA): 22.542842 113.958952 11.000000
[ INFO] [1675740828.523479041]: Waypoint created at (LLA): 22.542813 113.959001 12.000000
[ INFO] [1675740828.523494546]: Waypoint created at (LLA): 22.542756 113.959001 13.000000
[ INFO] [1675740828.523507912]: Waypoint created at (LLA): 22.542727 113.958952 14.000000
[ INFO] [1675740828.523520406]: Waypoint created at (LLA): 22.542756 113.958902 15.000000
[ INFO] [1675740828.523533197]: Waypoint created at (LLA): 22.542813 113.958902 10.000000
完成初始化航点任务
[ INFO] [1675740828.523546607]: Initializing Waypoint Mission…
航点上传成功
[ INFO] [1675740836.561940059]: Waypoint upload command sent successfully
开始自动航点飞行指令发送成功
[ INFO] [1675740836.566911899]: Mission start command sent successfully
模拟器上,无人机会自动解锁,然后起飞,并且完成设定航点的飞行任务,最终在最后一个航点悬停
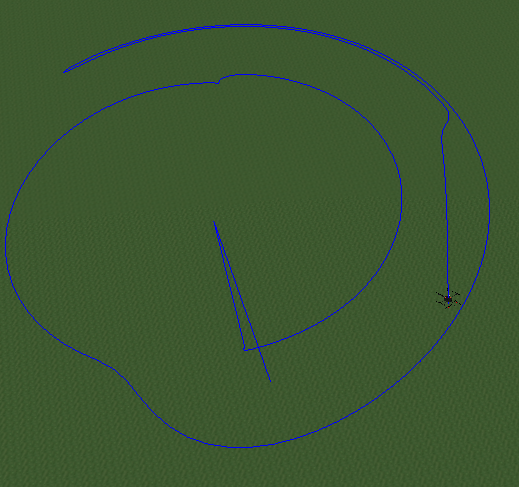
兴趣点环绕自动飞行
选择b后,会执行兴趣点环绕自动飞行任务
b
自动起飞,无人机自动解锁,然后飞至1.2m
[ INFO] [1675742099.443036182]: Takeoff command sent successfully
无人机先升至环绕高度,以默认环绕角速度15deg/s 进行位置绕飞,绕飞5s
[ INFO] [1675742114.443178988]: Start with default rotation rate: 15 deg/s
[ INFO] [1675742114.448505426]: Mission start command sent successfully
[ INFO] [1675742139.448688192]: Pause for 5s
任务暂停与继续
[ INFO] [1675742139.451349922]: Mission pause command sent successfully
[ INFO] [1675742144.451458193]: Resume
[ INFO] [1675742144.456389352]: Mission resume command sent successfully
更新绕飞半径
[ INFO] [1675742154.456525822]: Update radius to 1.5x: new radius = 15.000000
[ INFO] [1675742164.457708017]: Hotpoint update radius command sent successfully
更新绕飞速度
[ INFO] [1675742174.457859734]: Update hotpoint rotation rate: new rate = 5 deg/s
[ INFO] [1675742184.459081801]: Hotpoint update yaw rate command sent successfully
绕飞停止
[ INFO] [1675742194.459170476]: Stop
[ INFO] [1675742194.462806962]: Mission stop command sent successfully
降落
[ INFO] [1675742194.462819562]: land
[ INFO] [1675742194.467372616]: Land command sent successfully
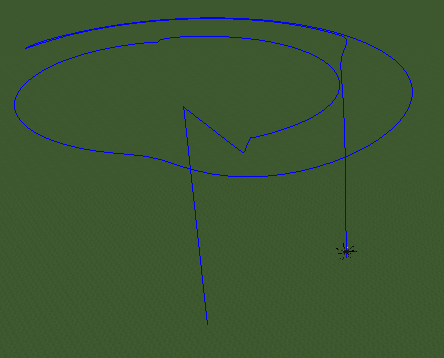
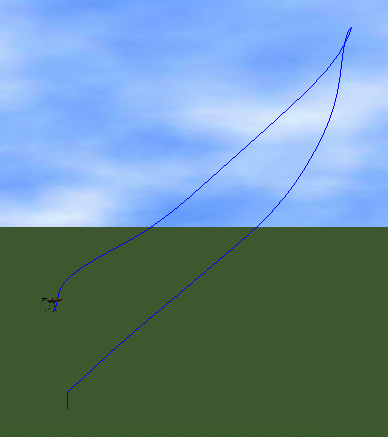
飞行控制
rosrun dji_sdk_demo demo_flight_control
无人机自动起飞,然后飞一个矩形
[ INFO] [1675743016.199742227]: A3/N3 taking off!
[ INFO] [1675743016.415844652]: Motor Spinning …
[ INFO] [1675743020.636488163]: Ascending…
[ INFO] [1675743022.278058330]: Successful takeoff!
飞行路线1, 仅截取开头一段
[ INFO] [1675743022.278089899]: ##### Start route 1 …
[ INFO] [1675743023.130819687]: -----x=-0.012091, y=0.096899, z=0.262428, yaw=1.040941 …
[ INFO] [1675743023.130845799]: +++++dx=0.012091, dy=19.903101, dz=2.737572, dyaw=-0.006256 …
[ INFO] [1675743023.950986554]: -----x=-0.034531, y=0.727045, z=0.875107, yaw=1.055536 …
[ INFO] [1675743023.951012451]: +++++dx=0.034531, dy=19.272955, dz=2.124893, dyaw=0.008338 …
[ INFO] [1675743024.770909261]: -----x=-0.017862, y=1.465063, z=1.378654, yaw=1.043764 …
[ INFO] [1675743024.770938054]: +++++dx=0.017862, dy=18.534937, dz=1.621346, dyaw=-0.003434 …
[ INFO] [1675743025.590800226]: -----x=-0.000521, y=2.222384, z=1.749954, yaw=1.045671 …
路线1,开始刹车
[ INFO] [1675743050.370302330]: ##### Route 1 start break…
[ INFO] [1675743050.570487046]: -----x=0.000151, y=19.593961, z=2.999557, yaw=1.047178 …
[ INFO] [1675743050.570512280]: +++++dx=-0.000151, dy=0.406039, dz=0.000443, dyaw=-0.000020 …
[ INFO] [1675743051.390515574]: -----x=0.000191, y=19.561036, z=2.999557, yaw=1.047188 …
[ INFO] [1675743051.390541700]: +++++dx=-0.000191, dy=0.438964, dz=0.000443, dyaw=-0.000009 …
路线1,结束
[ INFO] [1675743051.930245287]: ##### Route 1 finished…
后面重复路线2、路线3、路线4的打印信息
本地坐标位置控制
起飞,完成两个目标点的飞行
[ INFO] [1675743826.255594594]: A3/N3 taking off!
[ INFO] [1675743826.512051941]: Motor Spinning …
[ INFO] [1675743830.693925672]: Ascending…
[ INFO] [1675743832.325256741]: Successful takeoff!
[ INFO] [1675743858.244149614]: 1 of 2 target(s) complete
[ INFO] [1675743885.684112340]: 2 of 2 target(s) complete
相关文章:
DJI 无人机 Onboard SDK ROS 功能包demo运行
DJI 无人机 Onboard SDK ROS 功能包demo运行demo功能准备测试环境运行 dji sdk 节点运行 demo 节点自动飞行任务航点自动飞行兴趣点环绕自动飞行飞行控制本地坐标位置控制搭建好 Onboard SDK ROS 的开发环境后,功能包自身具备一些写好的demo功能案例 dji sdk 的节点…...

揭开JavaWeb中Cookie与Session的神秘面纱
文章目录1,会话跟踪技术的概述2,Cookie2.1 Cookie的基本使用2.2 Cookie的原理分析2.3 Cookie的使用细节2.3.1 Cookie的存活时间2.3.2 Cookie存储中文3,Session3.1 Session的基本使用3.2 Session的原理分析3.3 Session的使用细节3.3.1 Session…...
2023-02-20 Qt 5.13.1 + OpenCV 4.5.4环境编译
引言 OpenCV图像处理在Qt中编译记录。 之前一直是在Python中使用OpenCV,Python中使用某些模块使用pip工具很容易将对应的模块安装在系统中。根据项目需求项目都要转移在国产化中使用,为了适应国产化需求,将代码转移到Qt开发环境中,…...

波次分拣系统
一、系统架构: v1.2基站软件管理系统仓库标签v1.4仓库标签二、系统简介: 标签系统主要由标签服务器,基站,电子标签前三部分组成,操作界面借助于京东仓库已有的作业电脑来实现,标签服务器与WMS进行数据对接。…...

【Servlet篇】Request请求转发详细解读
文章目录1. 前言2. 实战案例3. 特点1. 前言 请求转发是一种在服务器内部的资源跳转方式,如图: 上图的大致过程为,浏览器发送请求给服务器,服务器中 a 资源接收到请求,资源 a 处理完请求后将请求发送给资源 bÿ…...

vector
目录 vector的成员函数: at: 编辑 size: assign:赋值 insert find? erase swap shrink_to_fit 编辑 vector的模拟实现: vector的框架: 构造函数: size和capacity r…...
LeetCode——104. 二叉树的最大深度
一、题目 给定一个二叉树,找出其最大深度。 二叉树的深度为根节点到最远叶子节点的最长路径上的节点数。 说明: 叶子节点是指没有子节点的节点。 来源:力扣(LeetCode) 链接:https://leetcode.cn/problems/maximum…...

漫画 | Python是一门烂语言?
这个电脑的主人是个程序员,他相继学习了C、Java、Python、Go, 但是似乎总是停留在Hello World的水平。 每天晚上,夜深人静的时候,这些Hello World程序都会热火朝天地聊天但是,这一天发生了可怕的事情随着各个Hello wor…...
2023.2 新方案 java代码混淆 java加密 字符串加密
Java字节码可以反编译,特别是创业公司,很好的项目很容易被别人破解反编译,造成很严重的损失,所以本混淆方案能很好的保护源码,而且在不断迭代,增强混淆效果,异常问题处理,达到保护项目的目的: 本次升级包括: 2023年02年19日 : ht-confusion-project-1.8…...

Swift 周报 第二十三期
前言 本期是 Swift 编辑组自主整理周报的第十四期,每个模块已初步成型。各位读者如果有好的提议,欢迎在文末留言。 欢迎投稿或推荐内容。目前计划每两周周一发布,欢迎志同道合的朋友一起加入周报整理。 勇敢是即便知道好结局不会每每降临在…...

android系统屏幕旋转角度,应用界面横竖屏,设备旋转角度,三者的区别以及使用。
注意区分以下三种概念的区别!!!。以及使用这三种方式判断横竖屏的方式。系统屏幕旋转角度fun getSystemRotation(): Int {val angle (getSystemService(WINDOW_SERVICE) as WindowManager).defaultDisplay.rotation//系统屏幕旋转的角度值re…...

【华为云-开发者专属集市】DevCloud+ECS、MySQL搭建WordPress
文章目录AppBazaar官网选择与购买项目项目概况操作过程购买DevCloud服务创建项目添加制品库应用部署购买ECS添加部署模板并执行任务故障排除安装及访问WordPress登录网站管理后台访问网站完善部署模板资源释放使用总结AppBazaar官网 首先,我们来到AppBazaar的官网&…...

Milvus 群星闪耀时|又一个小目标达成 :社区正式突破 15,000 星!
如果把 Milvus 看作开源世界中的一束微光,那用户便是无垠宇宙中点点闪烁的星光。用户每一次点亮 star 之时,Milvus 就会迸发出更加耀眼的光芒。不知不觉,已有数以万计的 star 为 Milvus 而亮。2022 年 4 月,Milvus 在 GitHub 的 …...
Qt信号与槽使用方法总结
前言 在图形界面编程中QT是为首选,组件之间如何实现通信是核心的技术内容。Qt 使用了信号与槽的机制,非常的高效、简单、易学,方便开发者的使用。本文详细的介绍了Qt 当中信号与槽的概念,并演示了各种信号与槽的连接方式。 什么…...

SpringCloud alibaba-Sentinel服务降级策略
文章目录RT:异常比例:异常数:RT: 平均响应时间 (DEGRADE_GRADE_RT):当 1s 内持续进入 N 个请求,对应时刻的平均响应时间(秒级)均超过阈值(count,以 ms 为单位…...
函数)
python常用函数——random()函数
random() 返回随机生成的一个实数,范围在[0,1)之间 语法如下: import random random.random() # 注意:random()是不能直接访问的,需要导入random包,然后通过random静态对象调用 # 参数: 无 # 返回值 返回随…...

PX4之启动脚本
PX4通过rcS脚本来设定需要启动的程序,比如设备驱动、控制模块、数据通信等。rcS脚本在项目中的文件位置 ROMFS/px4fmu_common/rcS 对应硬件平台固件上的位置 /etc/init.d/rcS 启动脚本流程如下 #!/bin/sh # PX4FMU startup script. # # 一些注释 ## 设置默认参…...
Java零基础入门到精通(持续更新中)
打开CMD命令窗口 WINR输入cmd 常用cmd命令代码 切换磁盘 E: 回车即可切换到e盘查看当前路径下的所有内容 dir进入目录 cd test回退到上一级目录 cd..进入多级目录 cd test\index\aaa回退到磁盘目录 cd \清屏 cls关闭命令行窗口 exit小例子:使用命令行窗口…...
:Bilibili视频缓存 m4s音视频合并 shell脚本)
杂七杂八(12):Bilibili视频缓存 m4s音视频合并 shell脚本
视频目录结构如下: 267132000/ 267132000/c_1015740000/ 267132000/c_1015740000/entry.json 267132000/c_1015740000/80/ 267132000/c_1015740000/80/audio.m4s 267132000/c_1015740000/80/video.m4s267132000/c_1015740011/ 267132000/c_1015740011/entry.json 2…...

Qt 某光谱仪程序开发
某光谱仪程序开发 文章目录某光谱仪程序开发摘要安装驱动注册COM组件导出.h和.cpp在Qt 中添加源文件开发打包程序关键字: Demo、 Qt、 COM、 dumpcpp、 C摘要 今天接到一个临时小任务,写一个的项目子模块的Demo,以供和专家们交流一下项目技…...

Phi-4-mini-reasoning推理能力展示:多步分析题目的简洁结论生成效果
Phi-4-mini-reasoning推理能力展示:多步分析题目的简洁结论生成效果 1. 模型介绍 Phi-4-mini-reasoning是一款专注于推理任务的文本生成模型,特别擅长处理需要多步分析的题目。与通用聊天模型不同,它被设计用来解决数学题、逻辑题等需要严谨…...

Python AOT编译成本如何从$280K/年压至$49K/年?2026前最后窗口期的6个不可逆决策点
第一章:Python AOT编译成本断崖式下降的战略本质Python 长期以来被诟病于运行时开销高、启动慢、内存占用大,其核心瓶颈在于 CPython 解释器的字节码解释执行机制。而近年来,以 Nuitka、Cython(搭配 --aot 模式)、以及…...

CherryStudio+Obsidian联动指南:如何让本地笔记成为大模型的长期记忆?
CherryStudio与Obsidian深度整合:构建AI可理解的长期记忆系统 在信息爆炸的时代,我们每天都在产生大量笔记和知识片段,但这些内容往往沉睡在本地文件中,无法与智能工具形成有效互动。Obsidian以其独特的网状笔记结构和本地Markdow…...

LeetCode 热题100——49.字母异位词分组
题目:给你一个字符串数组,请你将 字母异位词 组合在一起。可以按任意顺序返回结果列表。示例 1:输入: strs ["eat", "tea", "tan", "ate", "nat", "bat"]输出: [["bat"],["…...

Windows窗口置顶3分钟快速上手指南:告别频繁切换的烦恼
Windows窗口置顶3分钟快速上手指南:告别频繁切换的烦恼 【免费下载链接】PinWin Pin any window to be always on top of the screen 项目地址: https://gitcode.com/gh_mirrors/pin/PinWin 你是否曾在处理多个窗口时感到手忙脚乱?当你在写代码时…...

PPTist:开源在线演示文稿工具的创新实践与全场景应用指南
PPTist:开源在线演示文稿工具的创新实践与全场景应用指南 【免费下载链接】PPTist PowerPoint-ist(/pauəpɔintist/), An online presentation application that replicates most of the commonly used features of MS PowerPoint, allowing…...
)
《Linux网络编程》2.Socket编程(UDP/TCP)
💡Yupureki:个人主页 ✨个人专栏:《C》 《算法》《Linux系统编程》《高并发内存池》《MySQL数据库》 《个人在线OJ平台》《Linux网络编程》 🌸Yupureki🌸的简介: 目录 1. UDP编程 1.1 常用接口 1.1.1 socket() – 创建套接字 1.1.2 bin…...

SEO_为什么你的网站需要持续进行SEO优化?
SEO优化的重要性:为什么你的网站需要持续进行SEO优化 在当前竞争激烈的互联网市场中,网站的流量和用户参与度直接影响着企业的成功与否。为什么你的网站需要持续进行SEO优化呢?SEO(搜索引擎优化)不仅是提升网站在搜索…...

RVC变声器全场景解决方案:6大核心问题的系统解决策略
RVC变声器全场景解决方案:6大核心问题的系统解决策略 【免费下载链接】Retrieval-based-Voice-Conversion-WebUI Easily train a good VC model with voice data < 10 mins! 项目地址: https://gitcode.com/GitHub_Trending/re/Retrieval-based-Voice-Conversi…...
)
告别烧脑报文!用ESP8266+51单片机零基础玩转OneNet MQTT(附报文生成工具)
从零到一:ESP8266与51单片机轻松对接OneNet MQTT全指南 当你第一次听说MQTT协议时,是否被那些晦涩的十六进制报文吓退?作为物联网领域最流行的轻量级通信协议,MQTT本应让设备间的对话变得简单,但传统教程中复杂的报文…...