FPGA SPI 驱动程序
1.引言
此驱动程序已经完成很久了,花了2个星期的时间,主要是提升程序运行的效率。最近整理文件的时候又看到了,记录一下。
2.程序框架分解
module adc7254_Ctrl(input sys_clk, //system clkc 50Minput reset_n, //reset flaginput iData_a_in, //ADC to fpga input iData_b_in, output sclk_out, //to ADC output cs_out, //to ADC output sdin, //to ADCoutput [11:0] oData_a, //get dataoutput [11:0] oData_b //get data
);
wire clk_200M; //PLL驱动
AD_PLL AD_PLL_inst(.inclk0(sys_clk),.c0(Clk_200M),.c1(sclk_out)
);
wire En_conv,En_send; //定义ADC发送和接收程序的状态切换时间
adc_test adc_test_inst(.iRst_n(reset_n),.iDclk(sclk_out),.iSend_down(Send_down),.oAdc_rst_n(adc_rst_n),.oEn_conv(En_conv),.oEn_send(En_send)
);
wire Send_down; //ADC指令发送部分
adc_in_send adc_in_send_inst
(.iClk_200M(Clk_200M),.iRst_n(adc_rst_n),.iDcLK(sclk_out),.iEn_send(En_send),.oSDATA(sdin),.oSend_down(Send_down)
);
wire Conv_down;
adc_out_conv adc_out_conv_inst //ADC数据采样部分
(.iClk_200M ( Clk_200M ),.iRst_n ( adc_rst_n ),.iEn_conv ( En_conv ),.iDcLK ( sclk_out ),.iData_a_in ( iData_a_in ),.iData_b_in ( iData_b_in ),.oData_a ( oData_a ), .oData_b ( oData_b ),.oConv_down ( Conv_down )
);
assign cs_out = Conv_down & Send_down; //状态完成
endmodule3.子任务分解
(1)状态控制程序
其主要是以空状态,写状态,读状态三个状态顺序执行的。
module adc_test(input iRst_n,input iDclk,input iSend_down,output oAdc_rst_n,output reg oEn_send,output reg oEn_conv
);reg [1:0] state;
reg [5:0] sclk_cnt;
localparam state_IDLE = 2'd0;
localparam state_Write = 2'd1;
localparam state_Read = 2'd3;assign oAdc_rst_n = (iRst_n & state);
always @(posedge iDclk or negedge iRst_n) beginif(!iRst_n)beginsclk_cnt <= 6'd0;state <= state_IDLE;oEn_conv = 1'd0;oEn_send = 1'd0; end else begin case(state)state_IDLE:beginif (sclk_cnt > 6'd30 ) beginsclk_cnt <= 6'd0;state <= state_Write;oEn_conv = 1'd0;oEn_send = 1'd1;end else beginsclk_cnt <= sclk_cnt + 1'd1;state <= state_IDLE; oEn_conv = 1'd0;oEn_send = 1'd0; end endstate_Write:beginif (iSend_down == 1'd1 && sclk_cnt > 6'd30 ) beginsclk_cnt <= 0;state <= state_Read;oEn_conv = 1'd1;oEn_send = 1'd0;end else beginsclk_cnt <= sclk_cnt + 1'd1;state <= state_Write;oEn_conv = 1'd0;oEn_send = 1'd1;endendstate_Read:beginstate <= state_Read;sclk_cnt <= 1'd0;oEn_conv = 1'd1;oEn_send = 1'd0;endendcaseend
endendmodule(2)写命令程序部分
module adc_in_send(input iClk_200M, //200Minput iRst_n,input iDcLK, //最小T>60ns input iEn_send, output oSDATA,output oSend_down );//==================使能接收标志位en==================////一旦启动不会突然停止除非复位信号到来reg en;reg [5:0] sclk_cnt;always @(posedge iDcLK or negedge iRst_n ) beginif (!iRst_n) beginen <= 1'd0;sclk_cnt <= 6'd0;end else if ( iEn_send == 1'd1 && sclk_cnt == 6'd0 ) beginen <= 1'd1;sclk_cnt <= 6'd32;end else if ( sclk_cnt > 6'd1 ) beginen <= en;sclk_cnt <= sclk_cnt - 1'd1;end else if (oSend_down == 1'd1 && sclk_cnt == 6'd1 ) beginen <= 1'd0;sclk_cnt <= sclk_cnt - 1'd1;end else beginen <= en;sclk_cnt <= sclk_cnt;endend
//==================使能接收标志位en==================//
//==================SDATA输出操作=========================//
reg [15:0]CFR_16bit_data = 16'h8840; //需要写入寄存器中的数据
assign oSDATA = (en > 1'd0) ? ((sclk_cnt > 6'd17) ? CFR_16bit_data[sclk_cnt-6'd17] : 0 ): 0;
//==================SDATA操作=========================//
//==================oSend_down操作======================//
assign oSend_down = (sclk_cnt > 6'd1) ? 0 : 1;
//==================oSend_down操作======================//
endmodule
(3)读数据程序部分
module adc_out_conv(input iClk_200M, //200Minput iRst_n,input iData_a_in,input iData_b_in, input iDcLK, //最小T=60ns input iEn_conv,output reg [11:0] oData_a,output reg [11:0] oData_b,output oConv_down //T>70ns);
//下降沿接收
//==================使能接收标志位en==================//
//一旦启动不会突然停止除非复位信号到来
reg en;//接收使能标志位
reg [5:0] sclk_cnt;
always @(posedge iDcLK or negedge iRst_n ) beginif (!iRst_n) beginen <= 1'd0;sclk_cnt <= 5'd0;end else if (iEn_conv == 1'd1 && sclk_cnt == 4'd0) beginen <= 1'd1;sclk_cnt <= 6'd17;end else if (sclk_cnt > 4'd1) beginen <= en;sclk_cnt <= sclk_cnt - 1'd1;end else if (oConv_down == 1'd1 && sclk_cnt == 4'd1)beginen <= 1'd0;sclk_cnt <= sclk_cnt - 1'd1;end else beginen <= en;sclk_cnt <= sclk_cnt;end
end
//==================使能接收标志位en==================//
//==================dclk时钟采样==================//
reg [6:0] dclk;
always@(posedge iClk_200M or negedge iRst_n) beginif(!iRst_n) begindclk <= 7'd0;end else if(!en) begindclk <= 7'd0;end else begindclk <= {dclk[5:0],iDcLK};endend
//==================dclk时钟采样==================//
//==================状态切换==================//reg [1:0] state;parameter state_IDLE = 2'd0;parameter state_Read = 2'd1;parameter state_Write = 2'd2;always@(posedge iClk_200M or negedge iRst_n) beginif(!iRst_n ) beginstate <= state_IDLE;end else if(!en) beginstate <= state_IDLE;end else if(dclk[1] == 1 & dclk[2] == 0) beginstate <= state_Read;end else if (dclk[1] == 0 & dclk[2] == 1) beginstate <= state_Write;end else beginstate <=state;end end
//==================状态切换==================//
//==================data串行转并行==================//
reg [2:0] Data_a_in_temp,Data_b_in_temp;//保证7次采样有4次为1
reg [11:0] Data_a_temp,Data_b_temp;
always@(posedge iClk_200M or negedge iRst_n)
beginif(!iRst_n ) beginData_a_temp <= 12'd0;Data_b_temp <= 12'd0;Data_a_in_temp <= 3'd0;Data_b_in_temp <= 3'd0;end else if(sclk_cnt > 6'd16)beginData_a_in_temp <= 3'd0;Data_b_in_temp <= 3'd0;Data_a_temp <= 12'd0;Data_b_temp <= 12'd0;end else if(sclk_cnt > 6'd3 ) beginif(state == state_Read && dclk[6] == 0 ) beginData_a_in_temp <= Data_a_in_temp + iData_a_in;Data_b_in_temp <= Data_b_in_temp + iData_b_in;Data_a_temp <= Data_a_temp;Data_b_temp <= Data_b_temp;end else if(state == state_Write && dclk[0]!=dclk[1])beginData_a_in_temp <= 3'd0;Data_b_in_temp <= 3'd0;Data_a_temp <= {Data_a_temp[10:0],Data_a_in_temp[2]};Data_b_temp <= {Data_b_temp[10:0],Data_b_in_temp[2]};end else beginData_a_in_temp <= Data_a_in_temp;Data_b_in_temp <= Data_b_in_temp;Data_a_temp <= Data_a_temp;Data_b_temp <= Data_b_temp;endend else beginData_a_in_temp <= Data_a_in_temp;Data_b_in_temp <= Data_b_in_temp;Data_a_temp <= Data_a_temp;Data_b_temp <= Data_b_temp;end
end
//==================data串行转并行==================//
//==================oConv_down操作======================//
assign oConv_down = (sclk_cnt > 6'd1) ? 0 : 1;
//==================oConv_down操作======================//
//==================数据按帧输出==================//
always@(posedge iClk_200M or negedge iRst_n)
beginif(!iRst_n )beginoData_a <= 12'd0;oData_b <= 12'd0;endelse if( oConv_down == 1'd1)beginoData_a <= Data_a_temp;oData_b <= Data_b_temp;endelsebeginoData_a <= oData_a;oData_b <= oData_b;end
end
//==================数据按帧输出==================//
endmodule
相关文章:

FPGA SPI 驱动程序
1.引言 此驱动程序已经完成很久了,花了2个星期的时间,主要是提升程序运行的效率。最近整理文件的时候又看到了,记录一下。 2.程序框架分解 module adc7254_Ctrl(input sys_clk, //system clkc 50Minput re…...
 —— React17+React Hook+TS4 最佳实践,仿 Jira 企业级项目(二十七))
【实战】十一、看板页面及任务组页面开发(五) —— React17+React Hook+TS4 最佳实践,仿 Jira 企业级项目(二十七)
文章目录 一、项目起航:项目初始化与配置二、React 与 Hook 应用:实现项目列表三、TS 应用:JS神助攻 - 强类型四、JWT、用户认证与异步请求五、CSS 其实很简单 - 用 CSS-in-JS 添加样式六、用户体验优化 - 加载中和错误状态处理七、Hook&…...

mac m1 docker 安装kafka和zookeeper
获取本地ip地址 ifconfig en0 192.168.0.105. 下面的ip都会使用到 1、拉取镜像 docker pull wurstmeister/zookeeper docker pull wurstmeister/kafka 2、启动容器 启动 zookeeper docker run -d --name zookeeper -p 2181:2181 映射 3、 启动 kafka 注意ÿ…...
宏观经济和风电预测误差分析(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...
)
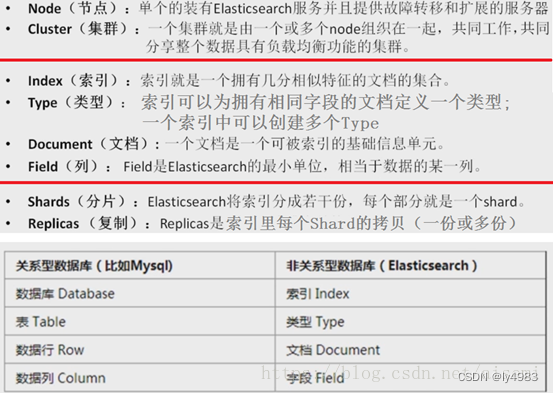
GO学习之 搜索引擎(ElasticSearch)
GO系列 1、GO学习之Hello World 2、GO学习之入门语法 3、GO学习之切片操作 4、GO学习之 Map 操作 5、GO学习之 结构体 操作 6、GO学习之 通道(Channel) 7、GO学习之 多线程(goroutine) 8、GO学习之 函数(Function) 9、GO学习之 接口(Interface) 10、GO学习之 网络通信(Net/Htt…...

Sentinel —实时监控
Sentinel 提供对所有资源的实时监控。如果需要实时监控,客户端需引入以下依赖(以 Maven 为例): <dependency><groupId>com.alibaba.csp</groupId><artifactId>sentinel-transport-simple-http</artif…...
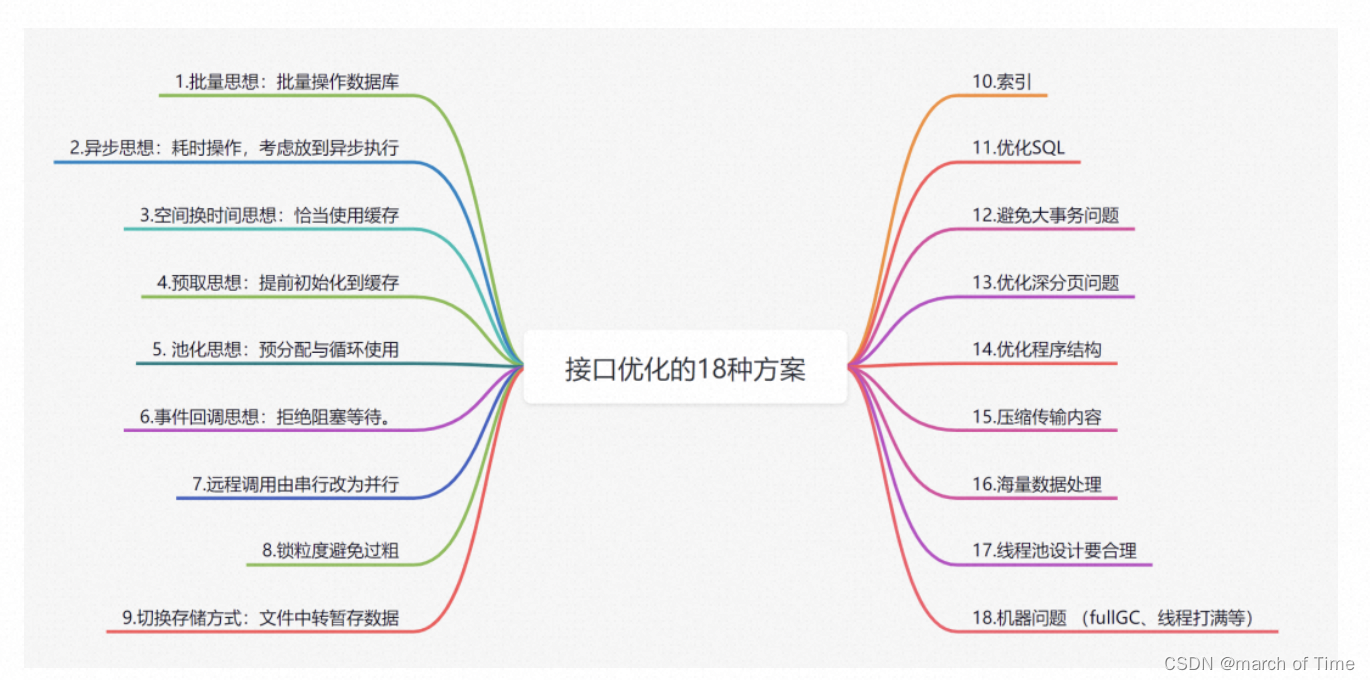
接口优化通用方案
目录 批量异步、回调缓存预取池化并行锁粒度索引大事务海量数据 批量 批量思想:批量操作数据库 优化前: //for循环单笔入库 for(TransDetail detail:transDetailList){ insert(detail); } 优化后: batchInsert(transDetailList); 异步、回…...

用Visual Studio 2022的.map文件来查看C++变量在内存中的布局情况
先看几个实例 代码1 #include <iostream> int data_arr[32768]; int main() {data_arr[1] 11;std::cout<<"data_arr[1]: " << data_arr[1] << std::endl;return data_arr[1]; } 上述代码在Win10 X64,MSVC Release模式下编译&…...
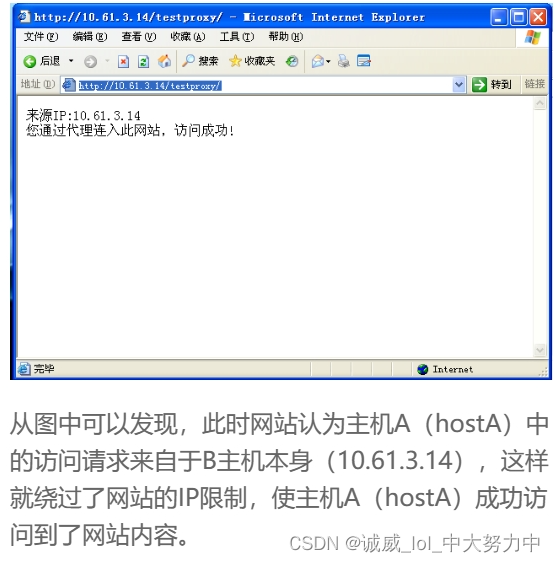
使用代理突破浏览器IP限制
一、实验目的: 主要时了解代理服务器的概念,同时如何突破浏览器IP限制 二、预备知识: 代理服务器英文全称是Proxy Server,其功能就是代理网络用户去取得网络信息。形象的说:它是网络信息的中转站,特别是它具有一个cac…...
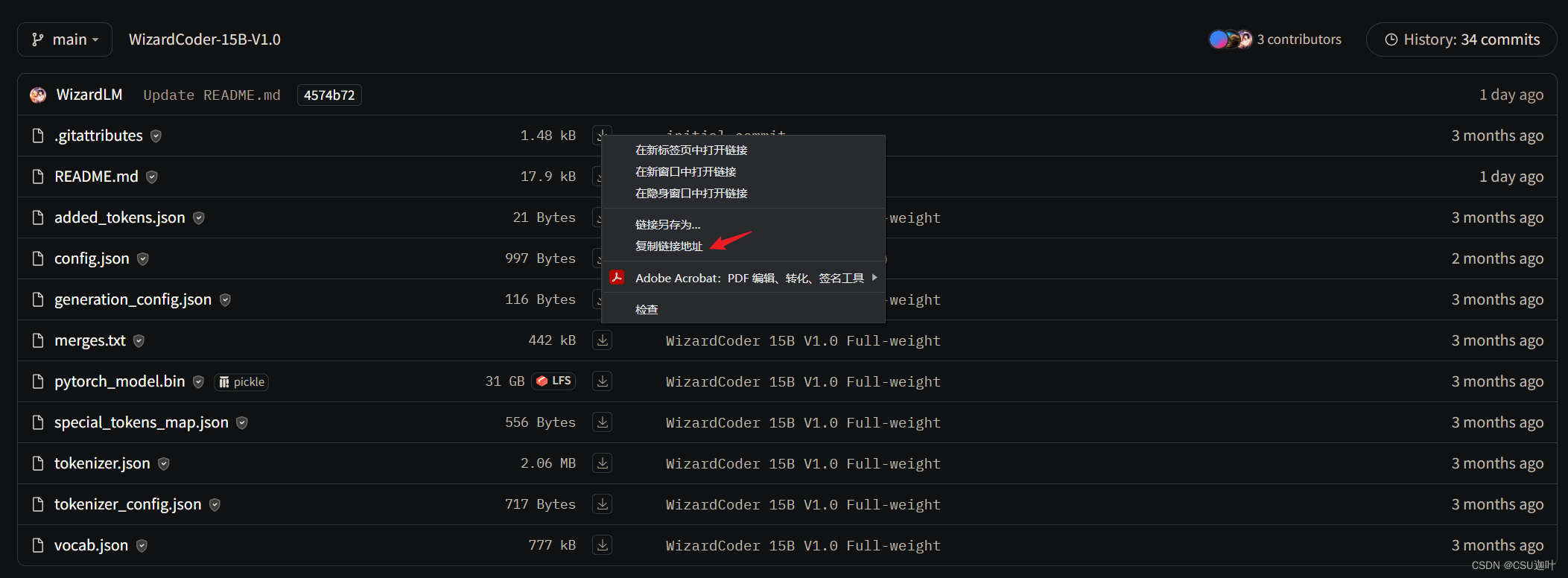
HuggingFace中的 Files and versions 如何优雅下载到本地?(Python requests,tqdm)
前言 在使用huggingface把玩各种大模型时,如果选择从远程加载模型,这个过程可能因为网络问题而非常耗时甚至直接失败,所以把模型、分词器等相关文件下载到本地,再直接从本地加载就成了不可回避的流程。 在进入具体版本的模型后&…...
三、原型模式
一、什么是原型模式 原型(Prototype)模式的定义如下:用一个已经创建的实例作为原型,通过复制该原型对象来创建一个和原型相同或相似的新对象。在这里,原型实例指定了要创建的对象的种类。用这种方式创建对象非常高效&a…...

transformer实现词性标注
1、self-attention 1.1、self-attention结构图 上图是 Self-Attention 的结构,在计算的时候需要用到矩阵 Q(查询), K(键值), V(值)。在实际中,Self-Attention 接收的是输入(单词的表示向量 x组成的矩阵 X) 或者上一个 Encoder block 的输出。而 Q, K, V…...

Java中异或操作和OTP算法
最近在研究加密算法,发现异或操作在加密算法中用途特别广,也特别好用。下面以Java语言为例,简单记录一下异或操作,以及在算法中的使用,包括常用的OTP算法。 一,异或操作特征 1, 相同出0&#…...
K8S最新版本集群部署(v1.28) + 容器引擎Docker部署(下)
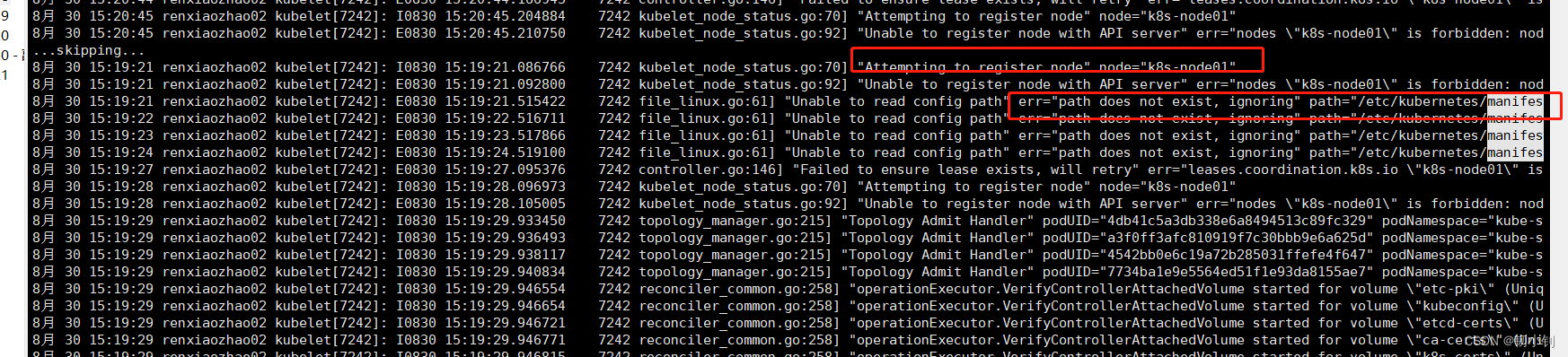
温故知新 📚第三章 Kubernetes各组件部署📗安装kubectl(可直接跳转到安装kubeadm章节,直接全部安装了)📕下载kubectl安装包📕执行kubectl安装📕验证kubectl 📗安装kubead…...

女子垒球运动的发展·垒球1号位
女子垒球运动的发展 1. 女子垒球运动的起源和发展概述 女子垒球运动,诞生于19世纪末的美国,作为棒球运动的衍生品,经过百年的积淀,已在全球范围内广泛传播,形成了丰富的赛事文化。她的起源,可以追溯到19世…...

Debian 30 周年,生日快乐!
导读近日是 Debian 日,也是由伊恩-默多克(Ian Murdock)创立的 Debian GNU/Linux 通用操作系统和社区支持的 Debian 项目 30 周年纪念日。 不管你信不信,从已故的伊恩-默多克于 1993 年 8 月 16 日宣布成立 Debian 项目,…...
字符串匹配的Rabin–Karp算法
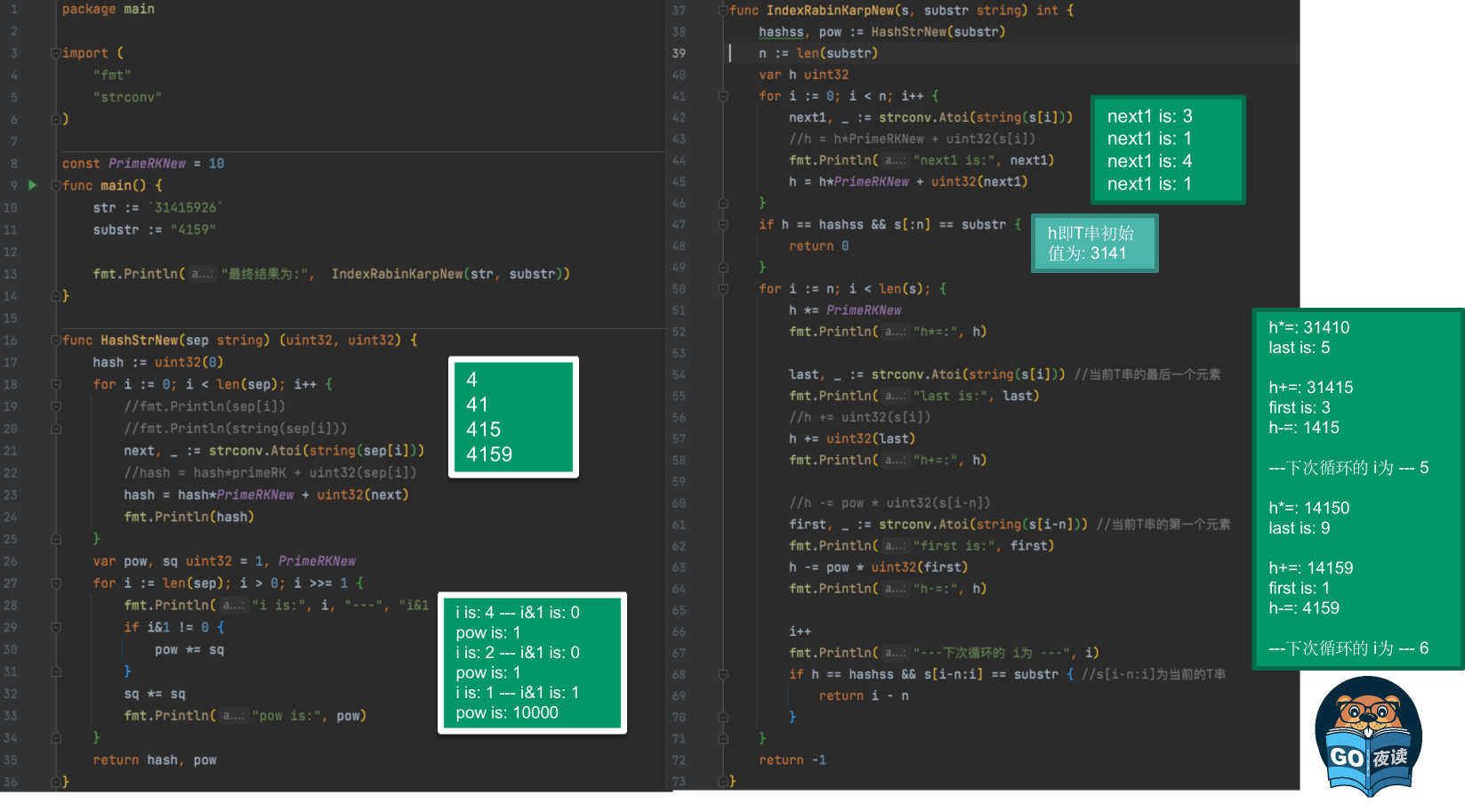
leetcode-28 实现strStr() 更熟悉的字符串匹配算法可能是KMP算法, 但在Golang中,使用的是Rabin–Karp算法 一般中文译作 拉宾-卡普算法,由迈克尔拉宾与理查德卡普于1987年提出 “ 要在一段文本中找出单个模式串的一个匹配,此算法具有线性时间的平均复杂度࿰…...
傅里叶变换(FFT)笔记存档
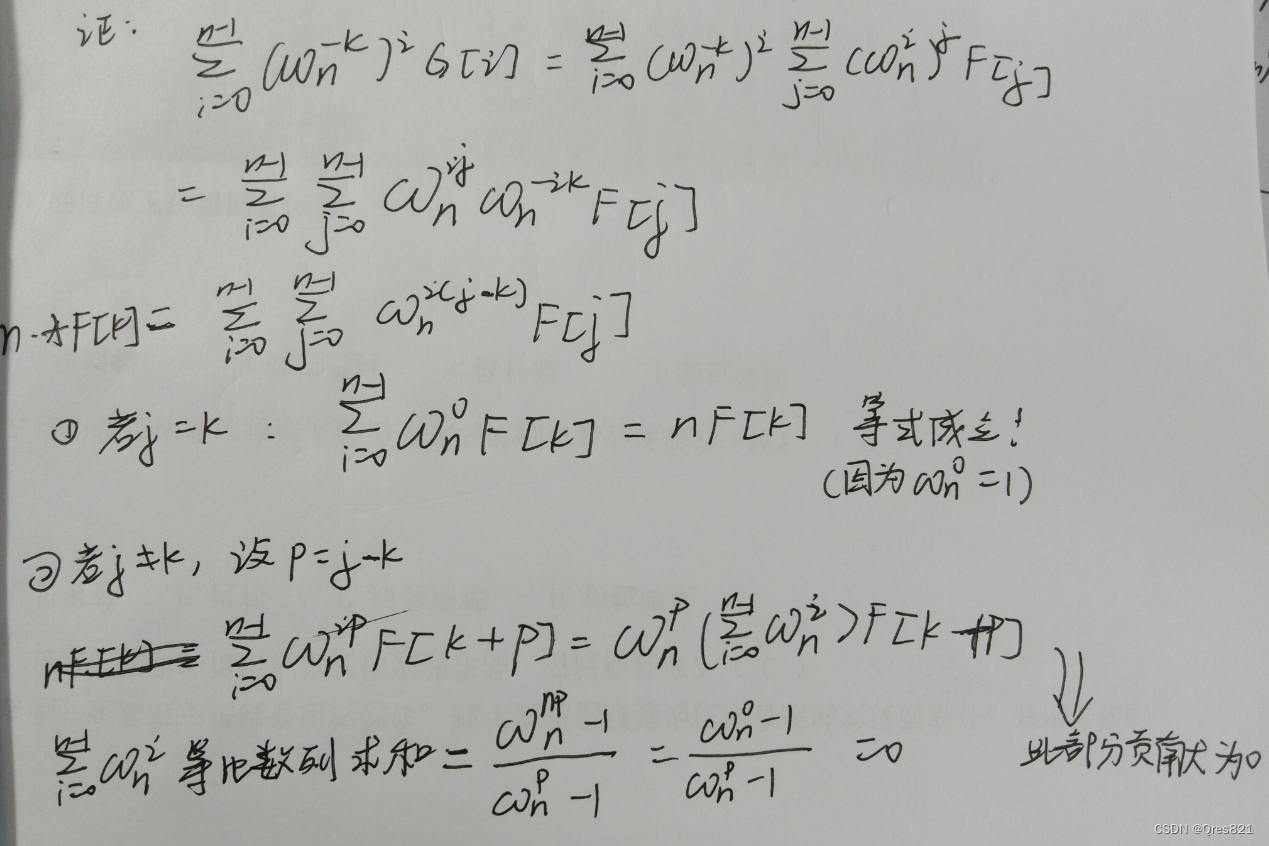
参考博客:https://www.luogu.com.cn/blog/command-block/fft-xue-xi-bi-ji 目录: FFT引入复数相关知识单位根及其相关性质DFT过程(难点)DFT结论(重要)IDFT结论(重要)IDFT结论证明&…...
ELK安装、部署、调试 (二) ES的安装部署
ElasticSearch是一个基于Lucene的搜索服务器。它提供了一个分布式多用户能力的全文搜索引擎,基于RESTful web接口操作ES,也可以利用Java API。Elasticsearch是用Java开发的,并作为Apache许可条款下的开放源码发布,是当前流行的企业…...
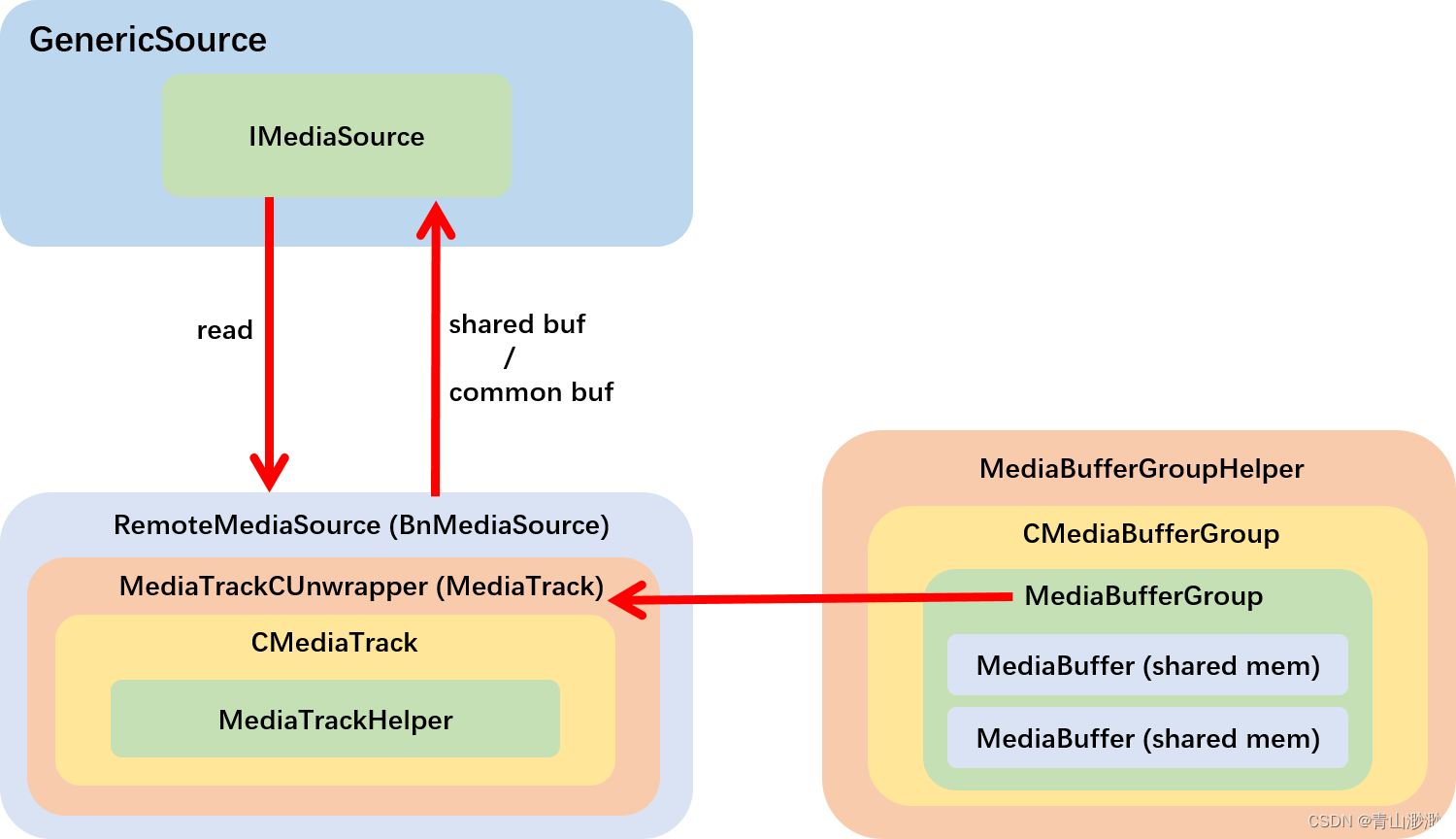
Android 13 - Media框架(8)- MediaExtractor
上一篇我们了解了 GenericSource 需要依赖 IMediaExtractor 完成 demux 工作,这一篇我们就来学习 android media 框架中的第二个服务 media.extractor,看看 IMediaExtractor 是如何创建与工作的。 1、MediaExtractorService media.extractor 和 media.p…...
跳转不触发重定向)
router.push(‘/‘)跳转不触发重定向
我来帮你分析为什么 router.push(/) 没有按照预期跳转到 /fenlei 路径。 首先让我查看相关的代码文件: router/index.js{path: /,component: Layout,redirect: /fenlei},已查看文件 index.vue 225-240 已查看文件 index.js 65-85 现在让我查看更多上下文,…...

长脉冲激光打孔技术及其与水平集算法的融合应用
长脉冲激光打孔,水平集算法工业级激光打孔就像用光做的"绣花针",在金属表面精准戳出微米级孔洞。但当我们把激光脉冲时间拉长到毫秒量级时,事情就变得有趣起来——材料不再是瞬间汽化,而是经历缓慢的熔融、流动、再凝固…...

Linux内核核心机制与开发实践详解
1. Linux内核概述与预备知识Linux内核作为操作系统的核心组件,承担着管理硬件资源、提供系统服务的关键角色。要深入理解Linux内核,需要具备以下基础知识储备:C语言能力:内核代码90%以上由C语言编写,需掌握指针操作、内…...

华为HarmonyOS PC突破:一键运行Linux工具
文章目录前言从「望Linux兴叹」到「一键真香」这三个功能,打工人看了会流泪开发者:终于不用「双机党」了生态破局的关键一步普通用户也能受益?当然一点冷静的观察写在最后前言 昨儿个IT圈炸锅了。 华为鸿蒙PC端应用市场悄咪咪上线了个叫融合…...

农业AI实践:OpenClaw+Qwen2.5-VL-7B识别病虫害图片
农业AI实践:OpenClawQwen2.5-VL-7B识别病虫害图片 1. 为什么选择OpenClaw做农业病虫害识别? 去年夏天,我在自家后院种植的番茄突然出现叶片发黄、边缘卷曲的现象。作为非专业农户,我翻遍植物病理学资料仍无法确诊,直…...

告别手动配置:用快马AI生成openclaw自动化安装与环境管理脚本
作为一名经常需要配置各种开发环境的程序员,我深刻体会到手动安装工具的繁琐。最近在搭建一个爬虫项目时需要用到openclaw,发现传统安装方式存在几个明显的效率痛点: 版本查找耗时:需要反复在官网和文档间切换,确认最…...

高效图像压缩:MozJPEG从入门到精通
高效图像压缩:MozJPEG从入门到精通 【免费下载链接】mozjpeg Improved JPEG encoder. 项目地址: https://gitcode.com/gh_mirrors/mo/mozjpeg 在数字媒体传播中,图像体积与加载速度始终是开发者面临的核心矛盾。传统JPEG压缩算法受限于基础编码框…...

从‘古董’协议到云存储桥梁:聊聊FTP在现代开发中的那些‘真香’应用场景
从‘古董’协议到云存储桥梁:聊聊FTP在现代开发中的那些‘真香’应用场景 当谈到文件传输协议时,很多人第一反应可能是"这不是上个世纪的技术吗?"。确实,FTP(File Transfer Protocol)诞生于1971年,比大多数程…...

2026届必备的十大AI辅助写作助手实测分析
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 人工智能于学术写作领域的介入,先是在简单的语法校对、文献检索方面,…...

DeepSeek-OCR-2应用实战:快速提取发票信息,财务效率翻倍
DeepSeek-OCR-2应用实战:快速提取发票信息,财务效率翻倍 1. 财务人的痛点:发票处理的效率黑洞 每个月末,财务部门总要面对这样的场景: 堆积如山的纸质发票需要手工录入电子发票PDF需要逐个打开复制粘贴关键信息&…...