ubuntu18安装Autoware 标定工具箱
参考链接:
https://blog.csdn.net/zbr794866300/article/details/107109186#:~:text=Autoware1.10%E4%BB%A5%E4%B8%8A%E7%9A%84%E8%BD%AF%E4%BB%B6%E9%83%BD%E9%9C%80%E8%A6%81%E5%8D%95%E7%8B%AC%E5%AE%89%E8%A3%85%E8%BF%99%E4%B8%AAcalibration%E6%A0%87%E5%AE%9A%E5%B7%A5%E5%85%B7%E7%AE%B1,1.nlopt%E5%AE%89%E8%A3%85%20%E6%96%B0%E5%BC%80%E4%B8%80%E4%B8%AA%E7%BB%88%E7%AB%AF%EF%BC%9A
单独安装标定工具包即可。
nlopt安装
calibration_camera_lidar安装
缺包:
CMake Error at /opt/ros/melodic/share/catkin/cmake/catkinConfig.cmake:83 (find_package):
Could not find a package configuration file provided by
"jsk_recognition_msgs" with any of the following names:
本人环境ubuntu18.04,安装jsk_recognition_msgs
sudo apt-get install ros-melodic-jsk-recognition-msgs
new bgug:
CMake Error at /usr/share/cmake-3.25/Modules/FindPackageHandleStandardArgs.cmake:230 (message):
Could NOT find GLUT (missing: GLUT_glut_LIBRARY GLUT_INCLUDE_DIR)
https://blog.csdn.net/weixin_46584887/article/details/125747117
sudo apt-get install freeglut3-dev
new new bug:

https://blog.csdn.net/qq_49959714/article/details/126266954
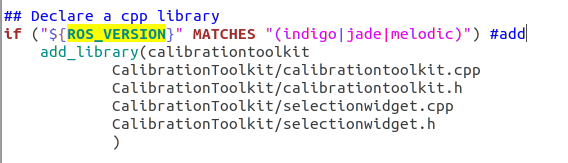
修改src/calibration_camera_lidar/ls_calibration/calibration_camera_lidar路径下的CMakeLists.txt

bug:没有节点,修改CMakeLists.txt文件
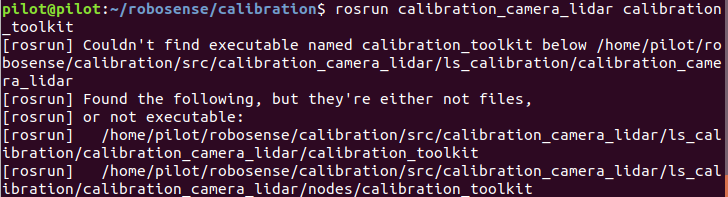
https://blog.csdn.net/zbr794866300/article/details/122216233

bug:缺少头文件
https://blog.csdn.net/qq_49959714/article/details/126234827#:~:text=%2Fhone%2Fnnnn%2Fcalibration%2Fsrc%2Fcalibration_canera_lidar%2Fls_calibration%2Fcalibration_canera_lidar%2Fnodes%2Fcalibration_test%2Fscan_window.cpp%3A42%3A45%3A%20error%3A%27CV_RGB%E2%80%99%20was%20not%20declared,in%20this%20scope%20%E8%A7%A3%E5%86%B3%E6%96%B9%E6%B3%95%EF%BC%9A%20%E8%BF%9B%E5%85%A5%E6%8A%A5%E9%94%99%E7%9A%84%E6%96%87%E4%BB%B6%E6%B7%BB%E5%8A%A0.h%E6%96%87%E4%BB%B6%EF%BC%9A
/home/pilot/robosense/calibration/src/calibration_camera_lidar/ls_calibration/calibration_camera_lidar/nodes/calibration_test/scan_window.cpp:42:45: error: ‘CV_RGB’ was not declared in this scope
cvLine(image, line_start, line_end, CV_RGB (120, 120, 120), 1, 8, 0);
^~~~~~
报错:conversion from ‘cv::Mat’ to non-scalar type ‘IplImage {aka _IplImage}
https://blog.csdn.net/weixin_43562170/article/details/117963652
对照教程、提示修改对应文件:
// IplImage temp = cv_image->image;
IplImage temp = cvIplImage(cv_image->image);
报错:
error: no match for ‘operator=’ (operand types are ‘CvMat’ and ‘cv::Mat’)
*m_intrinsic = m_intrinsic_opencv2to1;
^~~~~~~~~~~~~~~~~~~~~~
error: no match for ‘operator=’ (operand types are ‘CvMat’ and ‘cv::Mat’)
*m_dist = m_dist_opencv2to1;
^~~~~~~~~~~~~~~~~
就剩下这两个错误了!!!!注释掉了这两句,在代码中只看到了赋值,没有看到其他使用

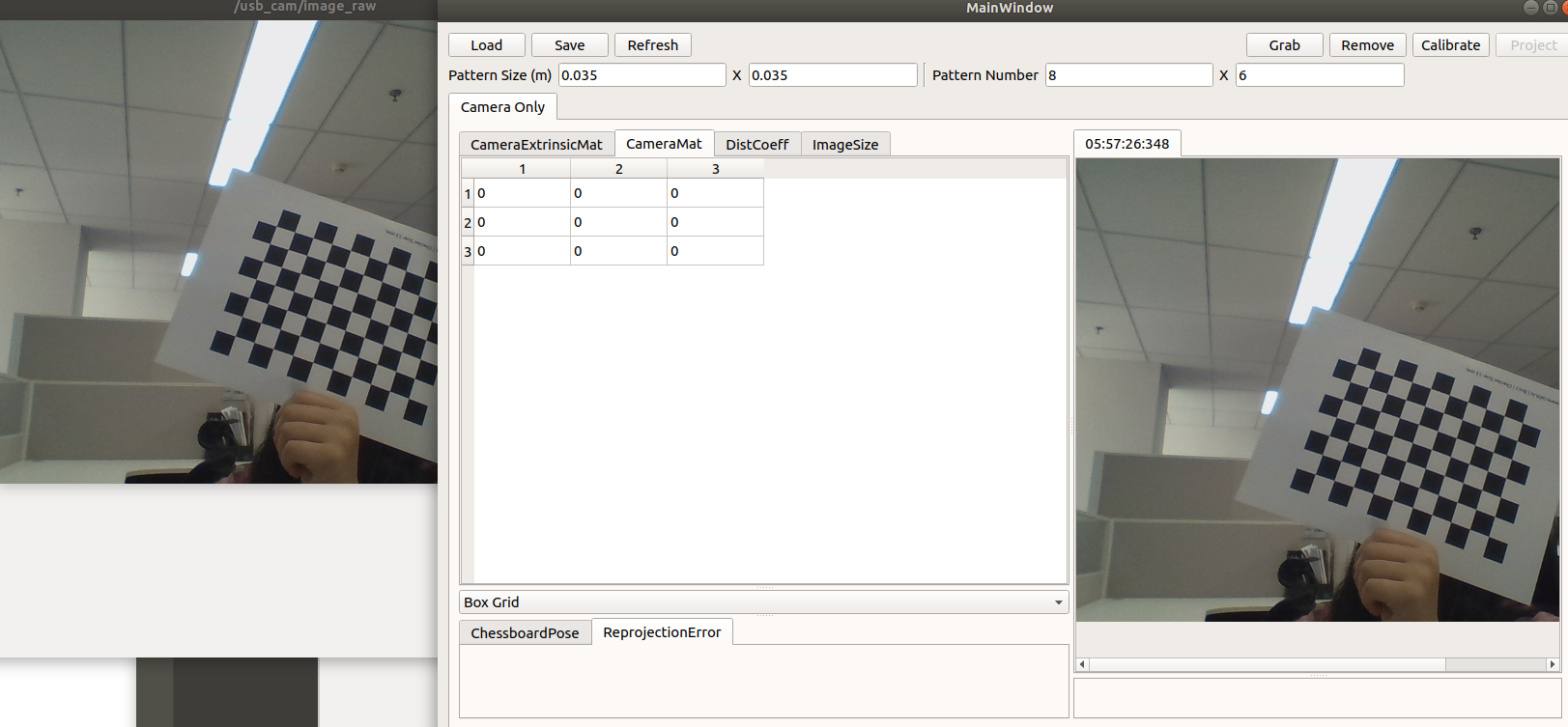
工具包现在可以启动开,但是不确定能否正常使用,毕竟注释了两条代码。
下一篇记录使用过程~
相关文章:
ubuntu18安装Autoware 标定工具箱
参考链接:https://blog.csdn.net/zbr794866300/article/details/107109186#:~:textAutoware1.10%E4%BB%A5%E4%B8%8A%E7%9A%84%E8%BD%AF%E4%BB%B6%E9%83%BD%E9%9C%80%E8%A6%81%E5%8D%95%E7%8B%AC%E5%AE%89%E8%A3%85%E8%BF%99%E4%B8%AAcalibration%E6%A0%87%E5%AE%9A%…...

【面试题】ES6 如何将 Set 转化为数组
大厂面试题分享 面试题库后端面试题库 (面试必备) 推荐:★★★★★地址:前端面试题库Set 是 ES6 中新增的一种集合类型,类似于数组,但其成员的值是唯一的,即不会重复。关于Set,可以阅…...

vs2022 实现无线调试安卓(Windows)
文章目录VS安装安卓调试环境前提条件Android SDK 版本查看安卓开启无线调试开启开发者模式打开USB调试功能打开无线调试功能查看配对信息(再次点击无限调试,不是switch开关)准备电脑端输入adb命令配对安卓查看设备清单如果没有设备VS无线调试…...
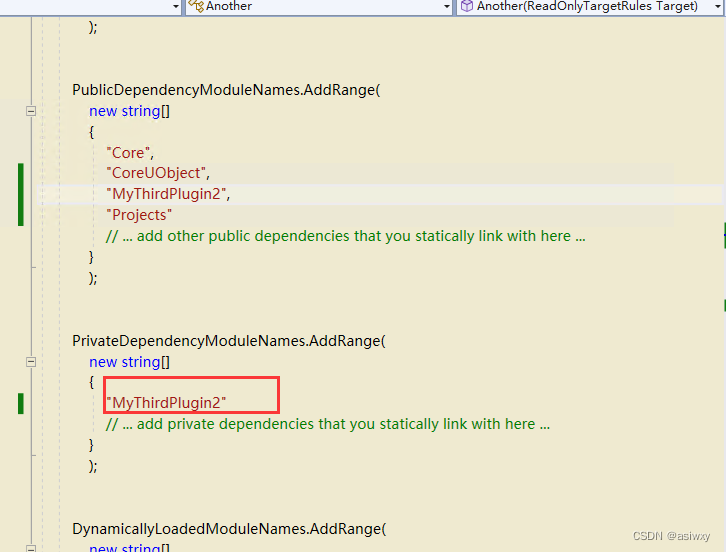
手把手教你做插件(2)模块大串联
0,前言 这篇文章笔记比较简略,大部分的操作都是和上一篇文章重复了,建议先看上一节文章,直达电梯:UE4 手把手教你做插件(1) 从代码引用插件_asiwxy的博客-CSDN博客UE4 手把手教你创建插件https:…...

LU Accepted or Rejected过程介绍
本文介绍LU成功和失败的过程。 LU accepted过程 [MS->NW] MM__LOCATION_UPDATING_REQUEST(LU type:MM_NORMAL_LU) MM_T3210_TIMER_ID Timer starts [NW->MS] MM__LOCATION_UPDATING_ACCEPT MM_T3210_TIMER_ID Timer stopped 通过OTA消息LOCATION_UPDATE_REQUEST查看LU ty…...

Teradata退了? 无所谓,GBASE会出手
近期,就在2月15日,国内IT界有搞出个大瓜,Teradata以对中国当前及未来商业环境的不确定性,慎重考虑后决定退出中国运营,后续将进入中国公司关闭程序。Teradata是一家有着40多年历史的数据仓库企业,被业界专业…...
 | 机试题+算法思路+考点+代码解析 【2023】)
华为OD机试 - 病菌感染(Python) | 机试题+算法思路+考点+代码解析 【2023】
病菌感染 题目 在一个地图中(地图有N*N个区域组成) 有部分区域被感染病菌 感染区域每天都会把周围上下左右的四个区域感染 请根据给定的地图计算多少天以后全部区域都会被感染 如果初始地图上所有区域都被感染 或者没有被感染区域返回-1 备注 1 <= N < 200 输入 一行…...

前置知识-边值问题、打靶法、bvp 系列函数的用法
1.2 边值问题 微分方程边值问题(Boundary Value Problem,简称BVP)是微分方程求解中的一个重要问题。与初值问题(Initial Value Problem,简称IVP)不同,BVP是在某个区间内寻求微分方程解的特定边界条件下的解。 在实际问题中,许多微分方程的解必须满足一些特定的边界条…...

为什么越来越多的企业选择智能客服系统?
现在智能客服系统越来越普遍,但是大部分的企业在配备智能客服系统的同时也会配置人工客服。因为目前为止,智能客服并不可以完全取代人工客服。智能客服系统之所以能够受到众多企业的青睐,主要是存在以下几点原因: 1、反应速度快&a…...

打造一款日志分析工具
一、简介 作为一名安全从业者,网络安全事件的应急响应工作是必不可少的,那么在应急支撑时,针对大量的日志数据便需要借助自动化工具实现快速的归类检测,并提取出所需的关键日志数据。本篇文章主要通过利用python语言编写一款web日…...

网络编程基础知识
套接字类型:1.字节流套接字(stream) 2.数据报接套接字(datagram) 3.原始套接字(raw) 端口:1.周知端口: 0~1023 2.注册端口: 1024~49151 3.动态端口: 49152~65535 OSI七层协议结构应用层表示层会话层...
)
2023北京老博会(CBIAIE全国老年产业必参盛会)
CBIAIE北京老博会|把握政策导向,迎合市场需求,引导销售渠道建设,搭建国际化的商业平台; 2023第十届中国(北京)国际老年产业博览会(CBIAIE北京老博会) The 2023 tenth China (Beijin…...

【字典转模型 Objective-C语言】
一、点按钮,弹出的这个效果,这实际上是个Label, 这实际上是一个Label,点按钮弹出的这个效果, 设置一个Label的背景色、前景色、透明度、等等, 让它加进来,然后通过动画让它隐藏掉, 这就是,这个效果的实现思路, 咱们这个效果,先稍微往后放一放, 这个并不是重点…...
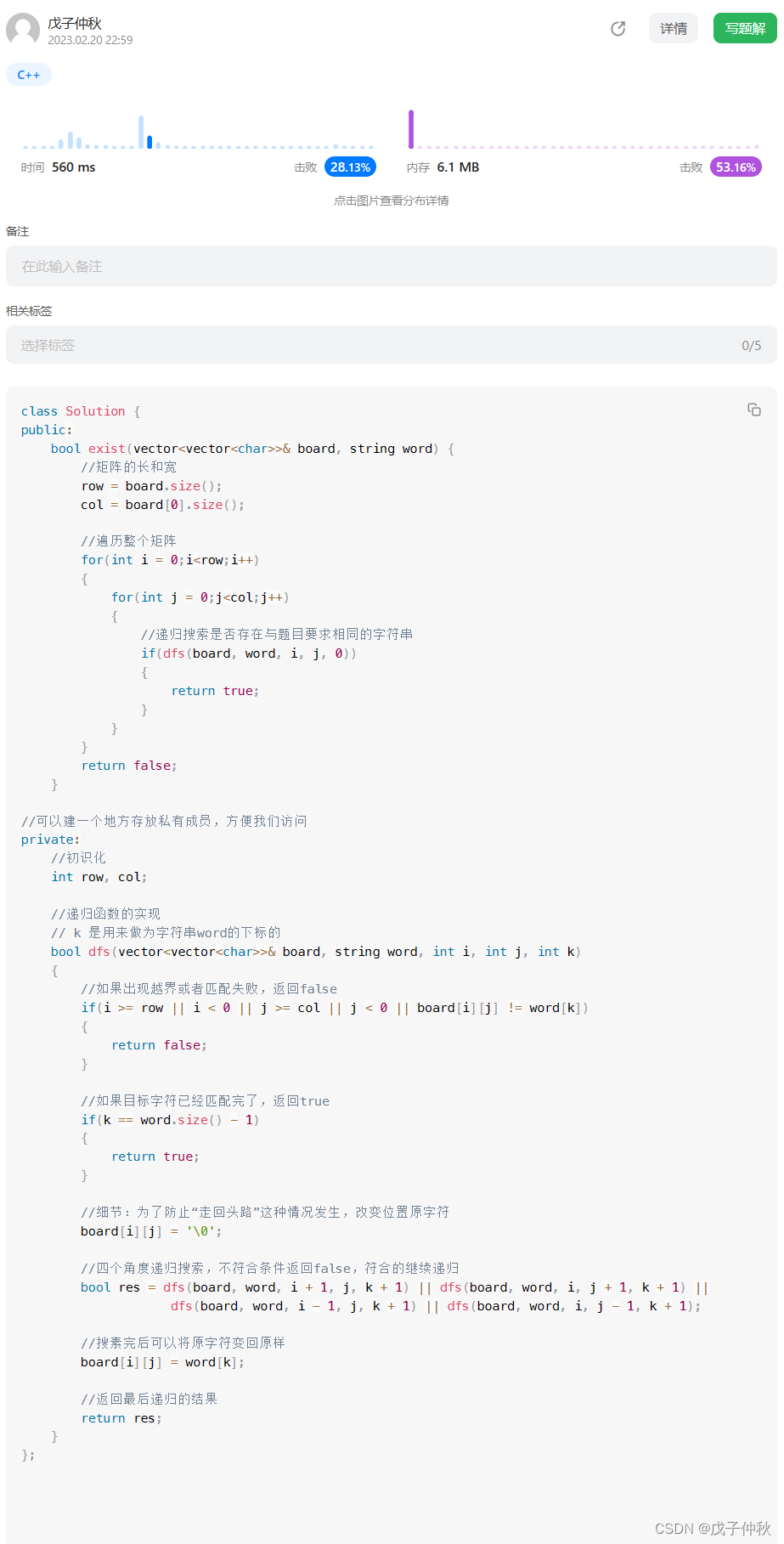
【LeetCode】剑指 Offer(6)
目录 写在前面: 题目:剑指 Offer 12. 矩阵中的路径 - 力扣(Leetcode) 题目的接口: 解题思路: 代码: 过啦!!! 写在最后: 写在前面ÿ…...

论文投稿指南——中文核心期刊推荐(法律)
【前言】 🚀 想发论文怎么办?手把手教你论文如何投稿!那么,首先要搞懂投稿目标——论文期刊 🎄 在期刊论文的分布中,存在一种普遍现象:即对于某一特定的学科或专业来说,少数期刊所含…...

Qt音视频开发15-动态切换解码内核的设计
一、前言 动态切换解码内核这个需求也是源自客户的真实需求,既然是动态切换,那肯定是运行期间切换,而不是通过改变标志位重新编译程序来切换,最开始做的就是这种方式,这样就是实现起来简单,但是用起来不够…...

concurrent-map 和 sync.Map,我该选择哪个?
官方的map并不是线程安全的,如果我们在多线程中并发对一个map进行读写操作,是会引发panic的。解决方案除了使用锁来对map进行保护外,还有两种方式:一,开源项目 concurrent-map 提供了可以用来做并发安全的map二&#x…...

华为OD机试 - 最少数量线段覆盖| 机试题算法思路 【2023】
最近更新的博客 华为OD机试 - 简易压缩算法(Python) | 机试题算法思路 【2023】 华为OD机试题 - 获取最大软件版本号(JavaScript) 华为OD机试 - 猜字谜(Python) | 机试题+算法思路 【2023】 华为OD机试 - 删除指定目录(Python) | 机试题算法思路 【2023】 华为OD机试 …...

【蓝桥集训】第五天——递推
作者:指针不指南吗 专栏:Acwing 蓝桥集训每日一题 🐾或许会很慢,但是不可以停下来🐾 文章目录1.砖块递推算法是一种简单的算法,通过已知条件,利用特定关系得出中间推论,逐步递推&…...

qnx的网络知识记录
1、网络驱动加载http://www.qnx.com/developers/docs/7.1/index.html#com.qnx.doc.core_networking/topic/drivers_Loading.html使用mount挂载io-pkt模块mount -Tio-pkt /lib/dll/devnp-e1000.sonicinfo 命令可以查看网卡的各种状态,包括phy的状态2、iopktiopkt的介…...
配置:从WSL网络到Docker容器GUI显示的完整链路)
ROS2(2)配置:从WSL网络到Docker容器GUI显示的完整链路
1. WSL2网络架构解析与ROS2容器网络配置 在WSL2Docker环境中运行ROS2时,网络问题是最常见的拦路虎。我刚开始用这个组合时,经常遇到镜像拉取超时、容器内无法访问外网的情况,后来才发现问题出在对WSL2网络机制的理解不足上。 WSL2采用虚拟化技…...

像素剧本圣殿效果展示:生成含镜头切换提示与音效标注的专业脚本
像素剧本圣殿效果展示:生成含镜头切换提示与音效标注的专业脚本 1. 专业剧本创作新体验 在影视创作领域,剧本质量直接影响最终作品的表现力。传统剧本创作往往需要编剧反复推敲场景转换、镜头语言和音效设计,这个过程既耗时又需要丰富的专业…...

2025届学术党必备的十大AI科研方案推荐榜单
Ai论文网站排名(开题报告、文献综述、降aigc率、降重综合对比) TOP1. 千笔AI TOP2. aipasspaper TOP3. 清北论文 TOP4. 豆包 TOP5. kimi TOP6. deepseek 在当下的学术与内容创作范畴之内,对于AI生成文本的检测变得越发严格起来。降AI率…...

基于STM32微控制器的DHT11环境温湿度监测系统设计与实现
基于stm32的环境温湿度监测系统设计(DHT11)最近在折腾STM32的环境监测小项目,发现DHT11这玩意儿真是便宜又好用。虽然精度比不上那些高端传感器,但做个室内温湿度监控绰绰有余。今天咱们直接开干,手把手搭个能跑的系统。硬件部分简单到哭&…...

Attu可视化工具:向量数据库性能监控与运维效率提升实践
Attu可视化工具:向量数据库性能监控与运维效率提升实践 【免费下载链接】attu The Best GUI for Milvus 项目地址: https://gitcode.com/gh_mirrors/at/attu Attu作为Milvus向量数据库的图形化管理界面,通过系统监控工具、性能分析仪表盘和可视化…...

告别公式迁移难题:3步实现LaTeX到Word的无缝转换体验
告别公式迁移难题:3步实现LaTeX到Word的无缝转换体验 【免费下载链接】LaTeX2Word-Equation Copy LaTeX Equations as Word Equations, a Chrome Extension 项目地址: https://gitcode.com/gh_mirrors/la/LaTeX2Word-Equation 问题溯源:学术公式迁…...

CyberChef实战指南:数据处理的瑞士军刀,安全工程师的秘密武器
CyberChef实战指南:数据处理的瑞士军刀,安全工程师的秘密武器 【免费下载链接】CyberChef The Cyber Swiss Army Knife - a web app for encryption, encoding, compression and data analysis 项目地址: https://gitcode.com/GitHub_Trending/cy/Cybe…...

Featurize深度学习训练全流程解析:从数据上传到模型输出
1. 数据上传:从本地到云端的高效迁移 第一次使用Featurize上传数据集时,我习惯性地点开了网页端的上传按钮,结果发现系统自动启用了分片上传机制。这个细节让我印象深刻——当我的10GB图像数据集在上传过程中网络波动时,竟然不需要…...

【帮宝抑菌膏】宝宝额头起红疹子怎么办?宝妈必看的原因与护理指南
宝宝额头突然冒出一片片红疹子,不仅让宝宝难受哭闹,更让新手父母揪心不已。作为深耕母婴护理领域十余年的专业品牌,帮宝凭借丰富的育儿指导经验和科学护理方案,为宝妈们提供全方位的解决方案。当发现宝宝额头起红疹子时࿰…...

类OpenClaw智能体优选指南,企业级+个人级全覆盖
2026年初,OpenClaw开源智能体框架凭借“自主规划、工具调用、端到端执行”的核心能力,打破传统AI“只对话不行动”的壁垒,在GitHub迅速斩获25万星标,引发全球科技圈热潮,国内厂商纷纷入局推出类OpenClaw产品࿰…...