机器人制作开源方案 | 桌面级机械臂--本体说明+驱动及控制
一、本体说明
1. 机械臂整体描述
该桌面级机械臂为模块化设计,包含主机模块1个、转台模块1个、二级摆动模块1个、可编程示教盒1个、2种末端执行器、高清摄像头,以及适配器、组装工具、备用零件等。可将模块快速组合为一个带被动关节的串联3自由度机械臂,亦可进一步加装、更换执行器、传感器来完成各类控制实验。

1.1 机械臂清单介绍
| 序号 | 名称 | 备注 |
| 1 | 本体 | 包括转台、小臂、大臂、执行机构 |
| 2 | 执行机构 | 如:手爪执行器、气动执行器 |
| 3 | 主机 | 包括树莓派、Arduino 主控板等相关的配置 |
| 4 | 显示屏 | |
| 5 | 电子部件 | 如:摄像头、遥控模块 |

1.2 产品配置
机械臂的主要硬件图如下所示:

组成的主要硬件参数如下表所示:

2. 机械臂结构说明
该机械臂结构是一个带被动关节的3自由度,包含一个1自由度的转台和带被动关节的2自由度关节。

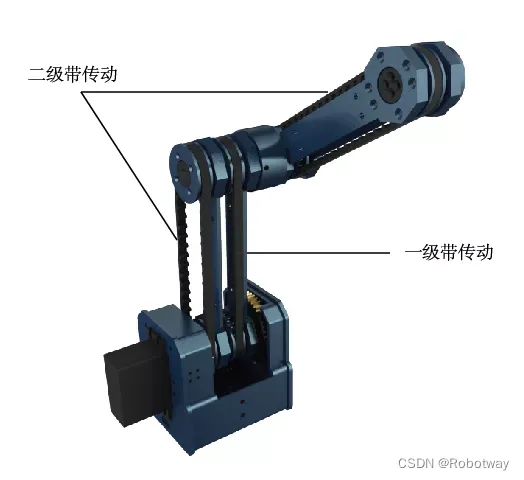
其中2自由度关节模块分为大臂和小臂:大臂通过1.76减速比的齿轮箱进行传动,小臂通过二级带传动实现传动和被动关节设计。被动关节可以保证执行器末端运动时指向保持一个方向,其中一级带传动控制小臂转动,另一级带传动使末端方向保持一致。
如下所示是装有手爪、摄像头的实物图:

其中的执行机构部分(即现在装手爪执行器的地方)还可以灵活的替换为气动部件(见下图)。

3. 机械臂的电路连接
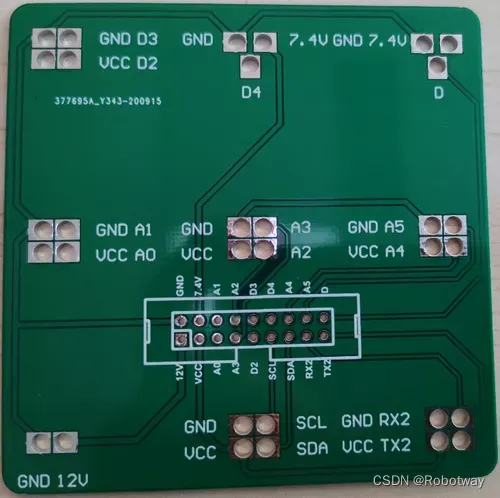
在进行电路连接前,先来了解一下主机的布局及引脚图。下图是主机的布局实物图,本实验中主要用到总线、PWM(D4)、TX2/RX2。

按下图所示进行机械臂的电路连接:


开机注意事项:
机械臂的状态主要包含非复位状态、复位状态(其中复位状态指的是:大臂转动到垂直状态、小臂转动到水平状态)。只有开机看到机械臂能够从非复位状态转到复位状态,后续实验才能正常进行;否则可能会出现烧录程序,但机械臂不按预期运动的现象。


4. 软硬件环境配置及使用
4.1软硬件环境介绍
机器人可利用视觉识别技术,进行识别、追踪目标、定位等功能。我们可以利用上位机来控制机器人的大脑,用下位机控制设备。
上位机是指:
人可以直接发出操控命令的计算机,一般是PC或者计算机的屏幕上显示各种信号变化(液压,水位,温度等),本实验将利用树莓派屏幕上显示视觉识别的结果。


下位机是指:
直接控制设备获取设备状况的的计算机,一般是PLC/单片机之类的,本实验将利用Arduino开源主控板充当下位机进行开发。


上位机发出的命令首先传给下位机,下位机再根据此命令解释成相应时序信号,直接控制相应设备。下位机读取设备状态数据(一般模拟量),转化成数字信号反馈给上位机。选择合适的平台及编程环境、函数库,就可以进行机器人结构、运动控制、视觉开发等多方面的应用,控制机器人的行为。
4.2在树莓派上安装Ros及功能包
为了便于使用,本实验中已把树莓派和Arduino板子进行了组合,设计出主控盒子(又叫主机),方便使用。主控盒子已预装好操作系统、编程环境以及需要用到的功能包。

对树莓派上的环境配置主要包括:安装Raspberry Pi OS (32-bit) with desktop操作系统、ROS、配置ROS环境、Arduino IDE、功能包。其中本实验需要的功能包包括视觉识别库(OpenCV2.4.9)、二维码识别库(zbar)。为了方便使用,本实验已做好了树莓派镜像文件,已经预安装好上述开发环境,电路连接好后可直接使用。当把主机与显示屏连接后,找到文末资料下载中的color_experiment_ws文件夹即可。
5. 资料下载
样机3D文件及程序源代码资料详见 桌面级机械臂-本体说明
二、驱动及控制
1. 总线舵机模式的设置
机械臂驱动采用总线式电机驱动,该总线式电机具有多种模式,如360°圆周模式、270°逆时针模式、270°顺时针模式等。总线舵机采用单总线通信方式,与传统舵机相比,最大特点就是舵机之间可串联,最多可级联255个舵机。
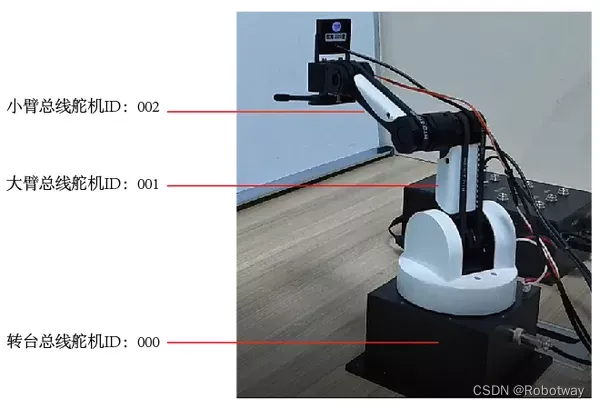
打开文末资料内的“总线舵机ID及模式更改资料”,为总线舵机设置模式,包括转台、大臂、小臂三部分,需要分别为总线舵机设置ID、工作模式。关于总线舵机ID设置如下图所示:
接下来开始为机械臂的各部分设置相应的舵机模式:
| 各部分 | 总线舵机ID | 计划设置舵机模式 | 代表含义 |
| 转台 | 000 | #000PMOD2! | 舵机模式,角度最大范围270 度,方向逆时针 |
| 大臂 | 001 | #001PMOD2! | 同上 |
| 小臂 | 002 | #002PMOD2! | 同上 |
器材准备:PC机或笔记本电脑(windows操作系统、Arduino IDE)、以及下图所示的器材。

操作过程:分别为机械臂的转台、大臂、小臂设置舵机模式,并能设置其初始角度。
1.1设置转台的舵机模式
第一步:按下图所示连接电路。

第二步:打开文末资料内的”总线舵机ID及模式更改资料\串口调试助手\sscom5.13.1.exe”(如下图所示)。

第三步:选择端口号、波特率,并打开串口。
先在菜单栏:串口设置-打开串口设置,选择端口号、波特率,点击“ok”即可。

接着点击“打开串口”,并点击“扩展”。

这里已经把命令设置好了,只需要依次点击描红的命令(如下图所示),就可以完成转台模式的设置,即可观察到转台转动到指定角度。

1.2 设置大臂的舵机模式
第一步:按下图所示把大臂的舵机线与小模块进行电路连接(注意:请先把小模块断电)。

第二步:在串口调试助手里,选择端口号、波特率并打开串口。
第三步:依次点击下边描红的命令,就可完成大臂模式的设置,同时可观察到大臂转动。

1.3设置小臂的舵机模式
第一步:按下图所示把小臂的舵机线与小模块进行电路连接(注意:请先把小模块断电)。

第二步:在串口调试助手里,选择端口号、波特率并打开串口。
第三步:依次点击下边描红的命令,就可完成小臂模式的设置,同时可观察到小臂转动。

这样就完成了总线舵机模式的设置工作,接下来的实验都是基于这种舵机模式来完成的。
2. 机械臂的单关节控制
实现思路:串口发送命令,控制单关节控制(提示:需要先设置好舵机模式)
器材准备:机械臂本体、主控盒、显示屏、键盘、鼠标(如下图所示)

操作步骤:
① 下载文末资料内的参考程序color_experiment_ws\src\Contril_Single_Joint\arm_driver\arm_driver.ino:
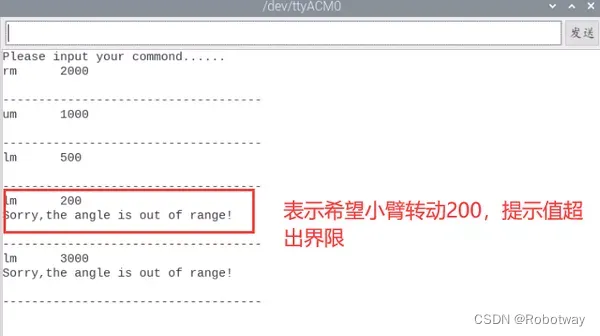
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-08-02 https://www.robotway.com/------------------------------*//*-----------------------------------------------------------------------------------------------------------------实验功能:实现单关节控制机械臂控制。实验思路:通过串口发送命令,控制机械臂单关节控制。首先程序实现读取串口发送的数据,接着处理串口发送的数据,最后程序将处理好的数据通过Serial1发送给机械臂达到控制机械臂的效果。注意:串口发送命令格式为[机械臂部件pwm](pwm范围是[500~2500])。例如:rm 1500 底盘转到1500um 1500 大臂转到1500lm 1500 小臂转到1500实验接线:(主要接线)机械臂通信口-------------(机械臂)电控箱机械爪(舵机)---------------(执行器)电控箱其他线路按照教材图片连接。Created 2020.7.16 By:Boris.yuan-----------------------------------------------------------------------------------------------------------------*/#include <Servo.h>#define CTL_BAUDRATE 115200 //总线舵机波特率#define SERIAL_PRINTLN Serial1#define SerialBaudrate 115200#define RM "rm"#define UM "um"#define LM "lm"String receive_string = "";int catch_red_numbers=0;int catch_blue_numbers=0;int current_angle=0;void setup() {// put your setup code here, to run once:delay(1100);Serial.begin(SerialBaudrate);SERIAL_PRINTLN.begin(CTL_BAUDRATE);Bus_servo_angle_init();delay(2000);Serial.println("Please input your commond......");}void loop() {while(Serial.available()>0){String commond = "";long n_step = 0;int index = 0;commond = Serial.readStringUntil('\n');index = commond.indexOf(' ');n_step = commond.substring(index+1).toInt();commond = commond.substring(0,index);Serial.print(commond);Serial.print('\t');Serial.println(n_step);if(commond==RM){if( (n_step<500) || (n_step>2500) ){Serial.println("Sorry,the angle is out of range!");}else{ArmSingleServoTo(0,n_step);}n_step=0;commond="";}if(commond==UM){if( (n_step<500) || (n_step>2500) ){Serial.println("Sorry,the angle is out of range!");}else{ ArmSingleServoTo(1,n_step);}n_step=0;commond="";}if(commond==LM){if( (n_step<500) || (n_step>2500) ){Serial.println("Sorry,the angle is out of range!");}else{ ArmSingleServoTo(2,n_step);}n_step=0;commond="";}Serial.println();Serial.println("------------------------------------");}}② 打开串口,查看返回的结果值。
注意:串口发送命令格式为[部件 pwm](pwm范围是[500~2500])。
| 串口发送命令例子 | 代表含义 |
| rm 1500 | 底盘转到1500 |
| um 1500 | 大臂转到1500 |
| lm 1500 | 小臂转到1500 |
首先,设置波特率并等待程序初始化,界面如下图所示:

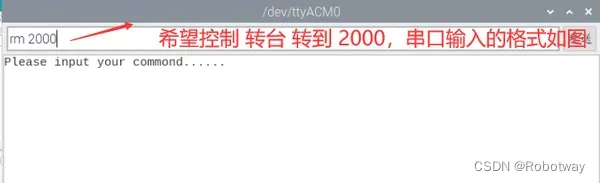
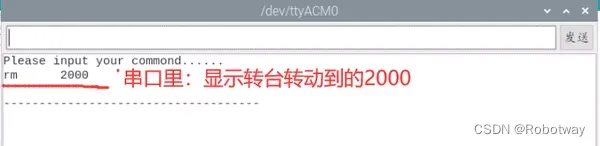
接下来,可以发送控制转台运动的例子,来观看结果。
输入格式如下图所示,就可以看见机械臂的转台运动:
同时也可看见串口显示数据。
下面是本实验中分别针对转台、大臂、小臂转动位置进行测试的结果(如下图所示)。
3. 操作杆方案
实现思路:通过操作杆控制气动盒的开、关; 当气动盒打开后,实现可以吸物块的功能。
实验器材及接线:如下图所示。

操作步骤:
第一步:将 Basra主控板 、Bigfish扩展板 与 Birdmen手柄扩展板 堆叠在一起。

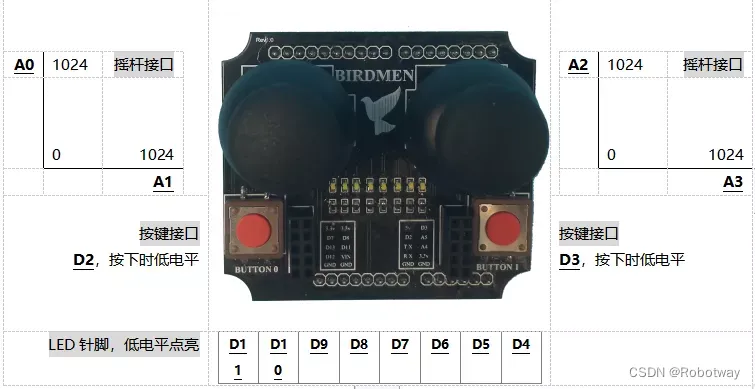
Birdmen手柄扩展板引脚图如下图所示:
第二步:下载文末资料内的参考程序color_experiment_ws\src\Rocker_Control_Sucker\rocker_contril_sucker\rocker_contril_sucker.ino:
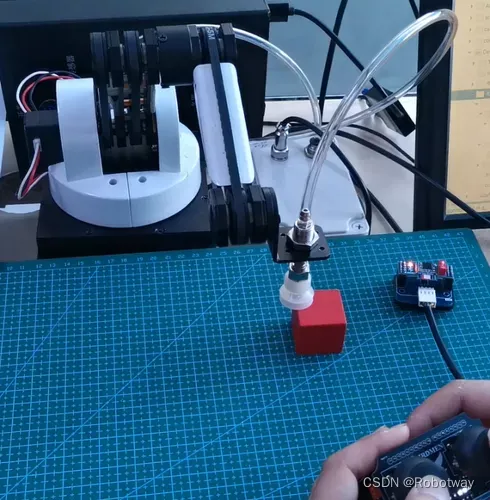
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-08-03 https://www.robotway.com/------------------------------*//*实验功能:摇杆模块控制吸盘开关。实验思路:读取摇杆模块数值,判断该数据,进而根据数据选取区间,编写不同区间,吸盘状态。实验操作:将该例程下载到arduino开发版,按照实验教程接线,完成后,给模块上电,试着滑动摇杆模块,控制吸盘开关状态。实验接线:气动箱信号脚连接到Barsa的D12引脚Create 2020.7.17 By:Boris.yuan*/#define Sucker_Pin 12#define Rocker_Pin A1void setup() {// put your setup code here, to run once:delay(1000);Serial.begin(9600);pinMode(Sucker_Pin,OUTPUT);pinMode(Rocker_Pin,INPUT);}void loop() {// put your main code here, to run repeatedly:int receive_Rocker_data = analogRead(Rocker_Pin);Serial.println(receive_Rocker_data);if( (receive_Rocker_data<200) ){digitalWrite(Sucker_Pin,LOW);}else if( (receive_Rocker_data>800) ){digitalWrite(Sucker_Pin,HIGH);}delay(30);}第三步:左侧的摇杆,当向右按下时,气动盒开关打开,可以吸取物品(如下图所示);当向左按下时,气动盒开关关闭。

4. 机械臂的无线遥控
本实验将通过 蓝牙 结合一个可编程示教器进行无线遥控的学习,包含蓝牙通信设定、无线控制。
4.1 两个蓝牙通信设定
实验目的:测试蓝牙主从模块数据发收。
连接在Birdmen手柄扩展板上的蓝牙模块为主模块;连接在带开关通信扩展坞上的蓝牙模块为从模块。

实现思路:当蓝牙主模块发送数据(如123)时,蓝牙从模块能收到该数据(123),代表通信成功。
实验器材:如下图所示。

操作步骤:
第一步:先给Basra主控板下载蓝牙主模块程序。
① 先按下图所示连接好电路(注意:蓝牙通信扩展坞的开关需拨到左侧)。

② 然后下载文末资料内的参考程序color_experiment_ws\src\Bluetooth_communication\Master\Master.ino:
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-08-03 https://www.robotway.com/------------------------------*/
#define Baud 9600
#define SERIAL Serial2void setup() {// put your setup code here, to run once:
delay(1000);
Serial.begin(Baud);
SERIAL.begin(Baud);
}void loop() {// put your main code here, to run repeatedly:while(SERIAL.available()>0){String receive_string = SERIAL.readStringUntil('\n');Serial.println(receive_string);receive_string = " ";}
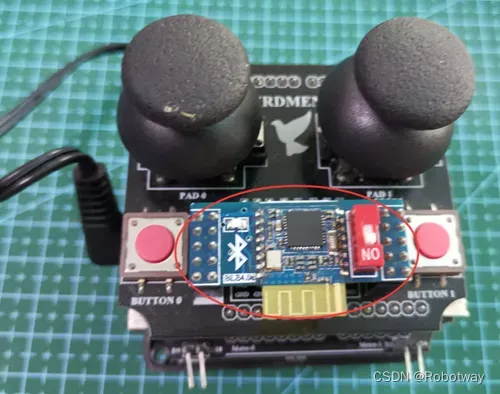
}③ 最后拔掉此主控板的USB线,将蓝牙主模块插在Bigfish扩展板的扩展坞上(如下图所示)。打开电源后,若看到蓝牙上的灯一闪一闪的,代表正在等待连接中。

第二步:给主机里的Arduino mega2560控制板下载蓝牙从模块程序。
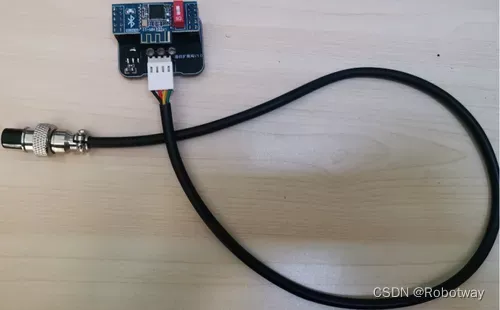
① 把蓝牙通信模块与主机的Tx2/RX2接口进行连接(如下图所示)。

② 然后下载文末资料内的参考程序color_experiment_ws\src\Bluetooth_communication\Salve\Salve.ino:
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-08-03 https://www.robotway.com/------------------------------*/#define Baud 9600#define SERIAL Serial2void setup() {// put your setup code here, to run once:delay(1000);Serial.begin(Baud);SERIAL.begin(Baud);}void loop() {// put your main code here, to run repeatedly:while(SERIAL.available()>0){String receive_string = SERIAL.readStringUntil('\n');Serial.println(receive_string);receive_string = " ";}}③ 把蓝牙从模块连接在底座上(如下图所示),然后接在主机的TX2/RX2上,可以看见蓝牙从模块的灯亮,且一闪一闪的。

第三步:观察蓝牙主从模块灯,如果看到蓝牙主从模块上的灯亮着但不闪烁,则表示蓝牙主从模块连接成功。
第四步:打开蓝牙(从)模块的Arduino串口监视器,观察是否接受到数据“123”,如果接收到相应的数据(如下图所示),则表示蓝牙主从模块通信成功。

4.2 蓝牙遥控
实验目的:通过控制手柄上的两个摇杆,来实现机械臂气动搬运物块的功能。
实现思路:当按下手柄摇杆的不同方向时,可以控制机械臂的转台、大臂、小臂朝不同方向运动(默认规定手柄左边为左侧摇杆,右边为右侧摇杆)
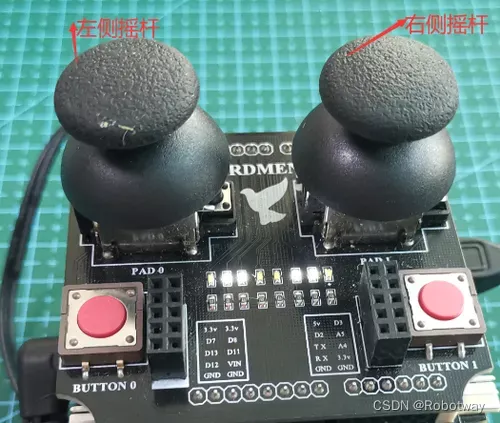
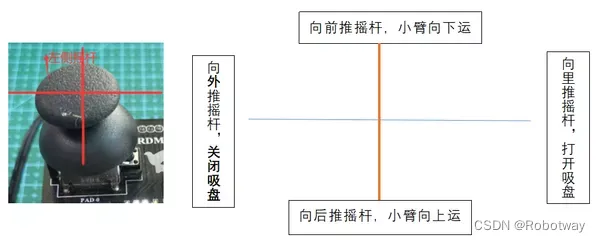
当左侧摇杆按下后,控制的吸盘、小臂的情况如下图所示:
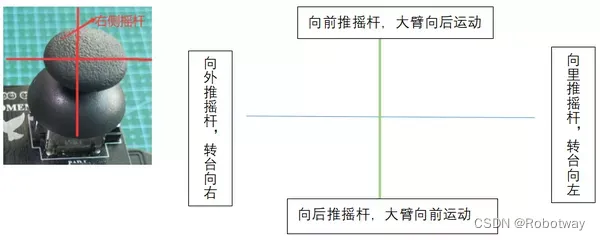
当右侧摇杆按下后,控制的转台、大臂的情况如下图所示:
实验器材:BLE4.0蓝牙模块 ×2、连接线、Basra控制板×1、与蓝牙连接的底座、机械臂本体、气动盒、连接线、主机、显示屏、鼠标、键盘
操作步骤:
第一步:先给带有摇杆模块的主控板(接蓝牙主模块)下载程序。
① 按下图所示连接电路:
② 然后下载文末资料内的参考程序color_experiment_ws\src\Wireness_Contril\Program_With_Rocker\controller\controller.ino:
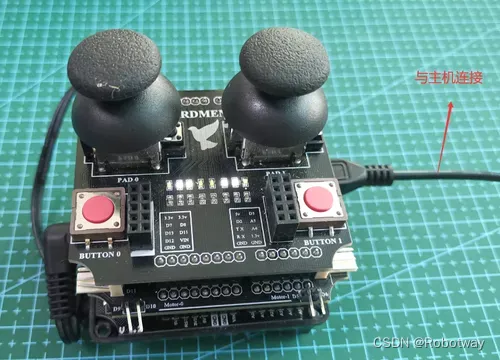
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-08-03 https://www.robotway.com/------------------------------*/void setup() {// put your setup code here, to run once:Serial.begin(9600); //蓝牙串口波特率pinMode(A0, INPUT); //左侧上下摇杆引脚pinMode(A1, INPUT); //左侧上下摇杆引脚pinMode(A2, INPUT); //右侧上下摇杆引脚pinMode(A3, INPUT); //右侧上下摇杆引脚}void loop() {// put your main code here, to run repeatedly:if(analogRead(A0) > 1000){Serial.print('u');}if(analogRead(A0) < 25){Serial.print('d');}if(analogRead(A1) > 1000){Serial.print('c');}if(analogRead(A1) < 25){Serial.print('s');}if(analogRead(A2) > 1000){Serial.print('f');}if(analogRead(A2) < 25){Serial.print('b');}if(analogRead(A3) > 1000){Serial.print('r');}if(analogRead(A3) < 25){Serial.print('l');}delay(10);//发送执行周期20ms,可更改,越小机械臂运动越快,但是可能导致机械臂卡顿}③ 将蓝牙主模块按下图所示插在手柄的扩展坞上。
第二步:给主机里的Arduino mega2560控制板(与蓝牙从模块连接)下载程序。
① 先把蓝牙从模块连接在扩展底座上;并把另一端与主机的TX2/RX2进行连接。
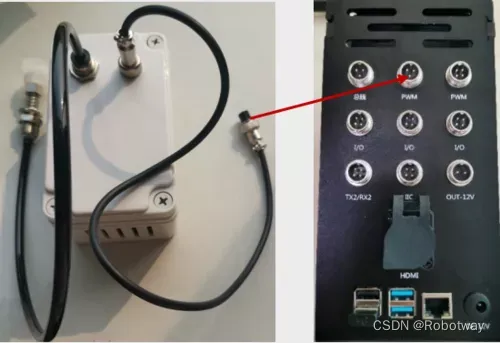
再把气动盒的三芯线与主机的PWM进行连接(如下图所示)。
② 然后下载文末资料内的参考程序color_experiment_ws\src\Wireness_Contril\Program_With_Chassis\Black_Handle_Robot_Arm_New\Black_Handle_Robot_Arm_New.ino:
/*------------------------------------------------------------------------------------版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.Distributed under MIT license.See file LICENSE for detail or copy athttps://opensource.org/licenses/MITby 机器谱 2023-08-03 https://www.robotway.com/------------------------------*///#include <SoftwareSerial.h>#include <stdio.h>#include <string.h>//#define mySerial Serial2 //总线舵机串口,TX2,GND,5V//#define mySerial2 Serial1 //蓝牙遥控串口TX1,RX1,GND,3.3V#define CTL_BAUDRATE 115200 //总线舵机波特率#define NOZZLE_PIN 4 //气动引脚,注意气动供电6v#define INIT_X 1 //假设大臂长度单位为1#define INIT_Y 1 //小臂长度与大臂长一致单位为1#define INIT_R 1500 //底座总线舵机中间位置波特率为1500#define DX 0.01 //每次X方向长的移动距离单位#define DY 0.01 //每次Y方向臂长的移动距离单位#define DR 5 //每次底座转动的单位//SoftwareSerial mySerial(51, 4);//SoftwareSerial mySerial2(10, 11);#define mySerial2 Serial2#define mySerial Serial1float cur_x = INIT_X, cur_y = INIT_Y;int cur_r = INIT_R;int alphaToUpwm(float alpha){return 2732.0-(alpha/M_PI)*2464;/*大臂转动角度的计算公式。2464是大臂摆动180°总线舵机计算后的pwm长度。大臂的减速比是44/25=1.76,测试的motor转动180°需要的pwm长度是1400,1.76×1400=2464;2732是转动90°之后竖直向上对应的实际pwm值,2732=(2464/2)+1500,其中1500是大臂初始化竖直状态是电机的PWM值*/}int betaToLpwm(float beta){return 1500 + (beta/M_PI)*1400; //小臂无减速比,由总线舵机直接驱动,小臂转动角度的计算公式,1400是小臂摆动180°总线舵机需要的PWM长度,1500是小臂保持水平状态的舵机PWM值}int armMoveTo(float x, float y){float alpha, beta;if (!cartesianToAlphaBeta(x, y, alpha, beta)){armServoTo(alphaToUpwm(alpha),betaToLpwm(beta));return 0;}return 1;}void setup() {// put your setup code here, to run once:mySerial.begin(CTL_BAUDRATE);pinMode(NOZZLE_PIN, OUTPUT); //气动引脚定义mySerial2.begin(9600); //蓝牙串口波特率设置nozzle_off(); //初始化气动关闭delay(1000);Serial.begin(9600);armMoveTo(cur_x, cur_y); //初始化机械臂大臂小臂位置cur_r = rotServoTo(cur_r); //初始化机械臂底座位置}void loop() {// Serial.print(Serial1.parseInt());// put your main code here, to run repeatedly:if (mySerial2.available()){char c = mySerial2.read();float tx, ty;switch(c){case 'u': // upty = cur_y + DY;if (armMoveTo(cur_x, ty) == 0) // success{cur_y = ty;}break;case 'd': // downty = cur_y - DY;if (armMoveTo(cur_x, ty) == 0) // success{cur_y = ty;}break;case 'f': // forwardtx = cur_x + DX;if (armMoveTo(tx, cur_y) == 0) // success{cur_x = tx;}break;case 'b': // backwardtx = cur_x - DX;if (armMoveTo(tx, cur_y) == 0) // success{cur_x = tx;}break;case 'l': // leftcur_r = rotServoTo(cur_r - DR);break;case 'r': // rightcur_r = rotServoTo(cur_r + DR);break;case 'c': // catch//Serial.println('c');nozzle_on();break;case 's': // release//Serial.println('s');nozzle_off();break;}}}第三步:通过控制手柄上的两个摇杆,来实现机械臂气动搬运物块的功能。
程序源代码及总线舵机ID及模式更改资料详见 桌面级机械臂-驱动及控制
相关文章:
机器人制作开源方案 | 桌面级机械臂--本体说明+驱动及控制
一、本体说明 1. 机械臂整体描述 该桌面级机械臂为模块化设计,包含主机模块1个、转台模块1个、二级摆动模块1个、可编程示教盒1个、2种末端执行器、高清摄像头,以及适配器、组装工具、备用零件等。可将模块快速组合为一个带被动关节的串联3自由度机械臂…...

有哪些前端调试和测试工具? - 易智编译EaseEditing
前端开发调试和测试工具帮助开发人员在开发过程中发现和修复问题,确保网站或应用的稳定性和性能。以下是一些常用的前端调试和测试工具: 调试工具: 浏览器开发者工具: 现代浏览器(如Chrome、Firefox、Safari等&#…...

【数据结构】手撕单链表
目录 一,链表的概念及结构 二,接口实现 1,单链表的创建 2,接口函数 3,动态创立新结点 4,打印 5,头插 6,头删 7,尾插 8,尾删 9,查找 10ÿ…...
两个git本地如何配置两个ssh密钥for mac
我是在mac上操作的。windows上也差不多一样操作。 1.找到本地的.ssh文件。我的文件结构如下如: 文件结构: (1)两个known_hosts文件是自动生成的,不用管 (2)readme文件是我个人记事本记录笔记…...
iOS逆向进阶:iOS进程间通信方案深入探究与local socket介绍
在移动应用开发中,进程间通信(Inter-Process Communication,IPC)是一项至关重要的技术,用于不同应用之间的协作和数据共享。在iOS生态系统中,进程和线程是基本的概念,而进程间通信方案则为应用的…...

qt day 1
this->setWindowIcon(QIcon("D:\\zhuomian\\wodepeizhenshi.png"));//設置窗口的iconthis->setWindowTitle("鵬哥快聊");//更改名字this->setFixedSize(500,400);//設置尺寸QLabel *qlnew QLabel(this);//創建一個標簽ql->resize(QSize(500,20…...
的多线程数据安全问题我们采用什么方法最好呢?)
针对java中list.parallelStream()的多线程数据安全问题我们采用什么方法最好呢?
当使用List.parallelStream()方法进行多线程处理时,可能会涉及到数据安全问题。下面是一些常见的方法来处理parallelStream()的多线程数据安全问题: 1. 使用线程安全的集合:Java中提供了线程安全的集合类,如CopyOnWriteArrayList…...

校园用电安全管理系统可以识别违规电器吗
校园用电安全管理系统是处理恶意用电问题有效手段之一,系统具有实时监测、异常预警、监测设备运行状态、远程控制用电等功能,可以从根本上管理学校用电量,制定合理的用电计划,限制用电成本,避免各种恶意用电行为&#…...

前端(十五)——开源一个用react封装的图片预览组件
👵博主:小猫娃来啦 👵文章核心:开源一个react封装的图片预览组件 文章目录 组件开源代码下载地址运行效果展示实现思路使用思路和api实现的功能数据和入口部分代码展示 组件开源代码下载地址 Gitee:点此跳转下载 CSDN…...

idea新建Java-maven项目时,出现Dependency ‘ xxx(jar包名)‘ not found的解决方案
项目场景: 项目场景:使用idea创建maven项目时,导入简单依赖时(本文以mysql-connector-java为例)。 问题描述 问题: 首先,在创建新的maven项目中,出现下列两种情况: &am…...
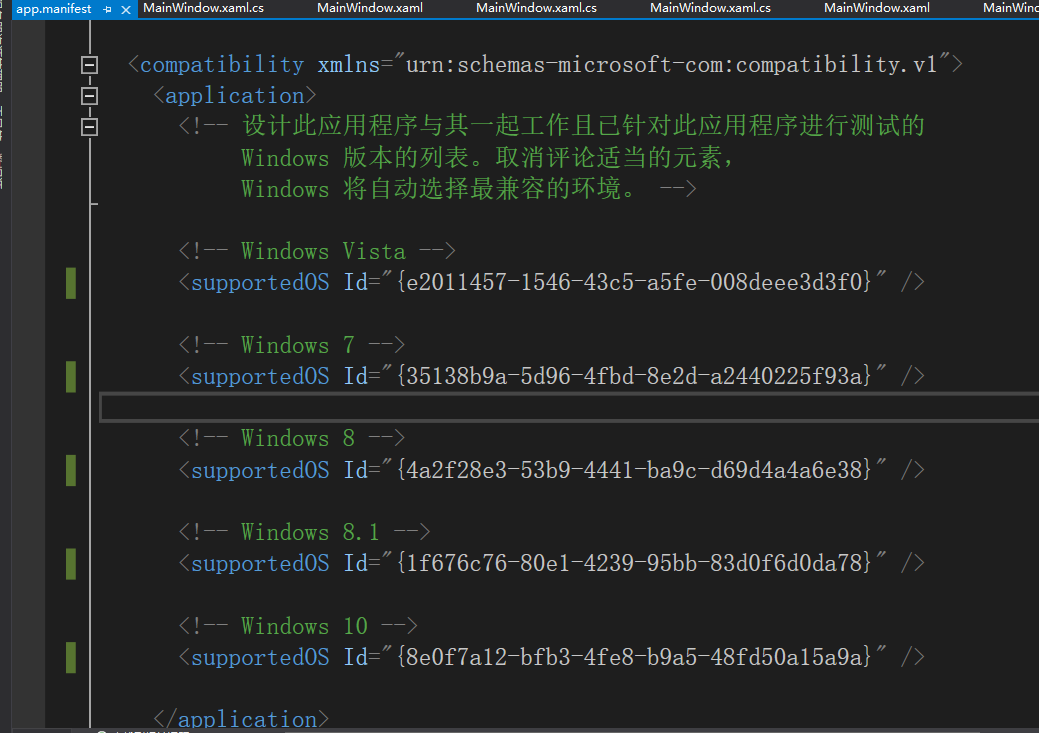
C# 获取Windows系统版本注意事项
首先通过微软官方文档:https://learn.microsoft.com/zh-cn/windows/win32/sysinfo/operating-system-version了解各个操作系统对应的版本号 下面介绍3种获取版本号的方式及弊端 1. Environment.OSVersion.Version OperatingSystem os Environment.OSVersion;// 判断…...
)
STM32设计的宠物投喂器(正点原子mini开发板+2.8寸屏)
一、设计需求 【1】 项目背景 在竞争日益激烈的今天,各行各业为提高竞争力,纷纷推出了各种新、奇的事物来吸引消费者。经过长时间的市场调查,发现广大市民及民营企业家大多还采用传统的人工喂养方式,这种方式不但耗费了大量的人力资源,而且由于现在的人力成本的不断增加…...
Python编程——深入了解不可变的元组
作者:Insist-- 个人主页:insist--个人主页 本文专栏:Python专栏 专栏介绍:本专栏为免费专栏,并且会持续更新python基础知识,欢迎各位订阅关注。 目录 一、元组是什么 二、元组的定义 1、相同类型组成元组…...
JVM——类加载与字节码技术—类加载器+运行期优化
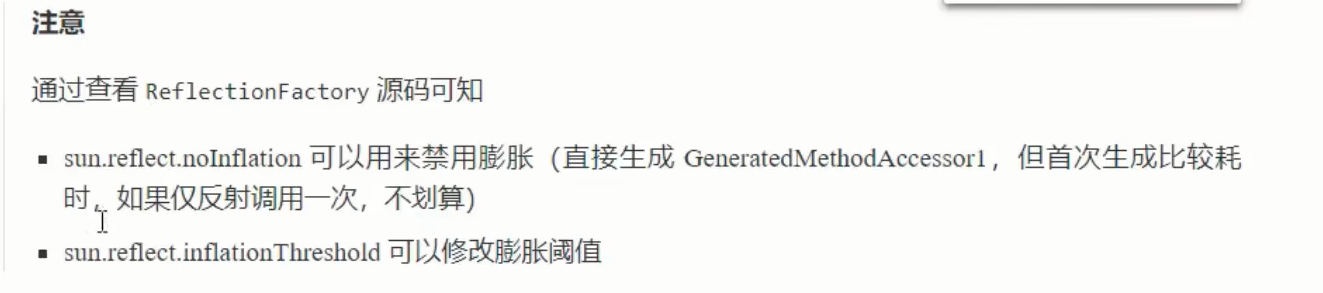
5.类加载器 jdk的类加载器具有层级关系。 启动类加载器》扩展类加载器》应用程序类加载器》自定义类加载器 对应类加载器只会负责加载对应目录的类。 双亲委派上级机制 应用程序类加载器加载一个类之前会先查询上级加载器是否已经加载过了该类。然后再让上级询问上上级。都…...

[linux实战] 华为云耀云服务器L实例 Java、node环境配置
系列文章目录 第一章 [linux实战] 华为云耀云服务器L实例 Java、node环境配置 文章目录 系列文章目录前言一、任务拆解二、修改密码三、配置安全规则四、远程登录并更新apt五、安装、配置JDK环境5.1、安装openjdk,选择8版本5.2、检查jdk配置 六、安装、配置git6.1、安装git6.2…...
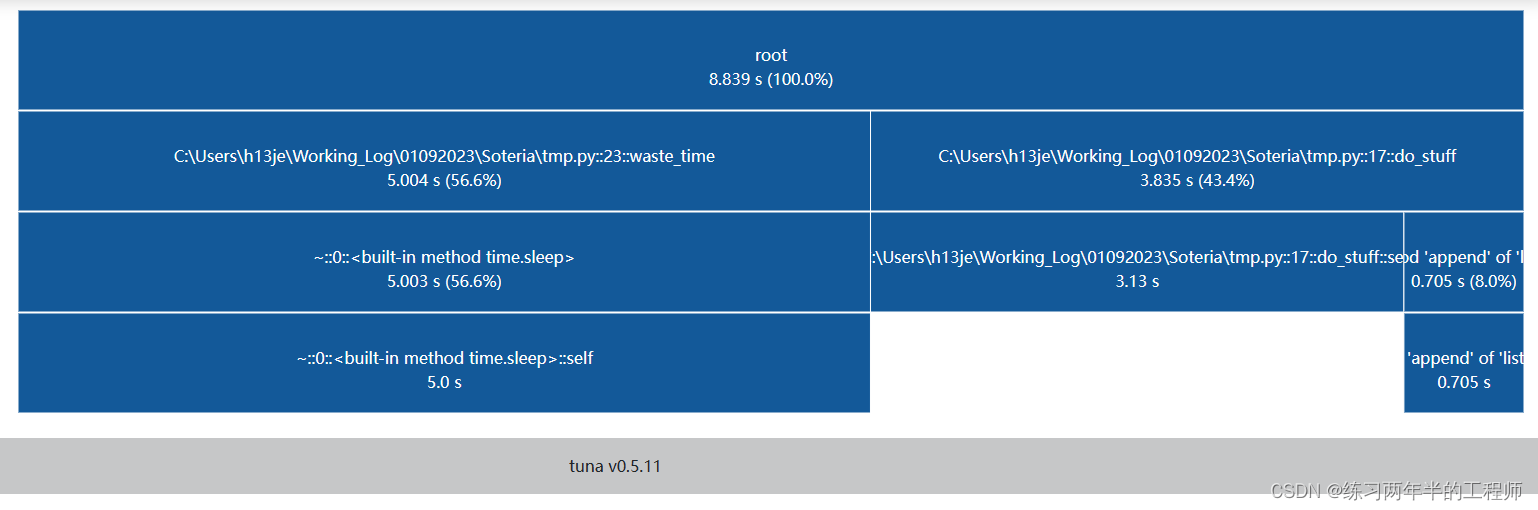
python面试:使用cProfile剖析程序性能
我们需要安装tuna:pip install tuna 程序执行完毕后,我们会得到一个results.prof,在CMD中输入指令:“tuna results.prof”。 import time import cProfile import pstatsdef add(x, y):resulting_sum 0resulting_sum xresulti…...

leetcode-188-买卖股票的最佳时机 IV
1. 问题描述 https://leetcode.cn/problems/best-time-to-buy-and-sell-stock-iv/description/ 2. 解题代码 public class Solution {public int MaxProfit(int k, int[] prices) {if(prices.Length<2){return 0;}if(k0){return 0;}List<int> listValuenew List<…...
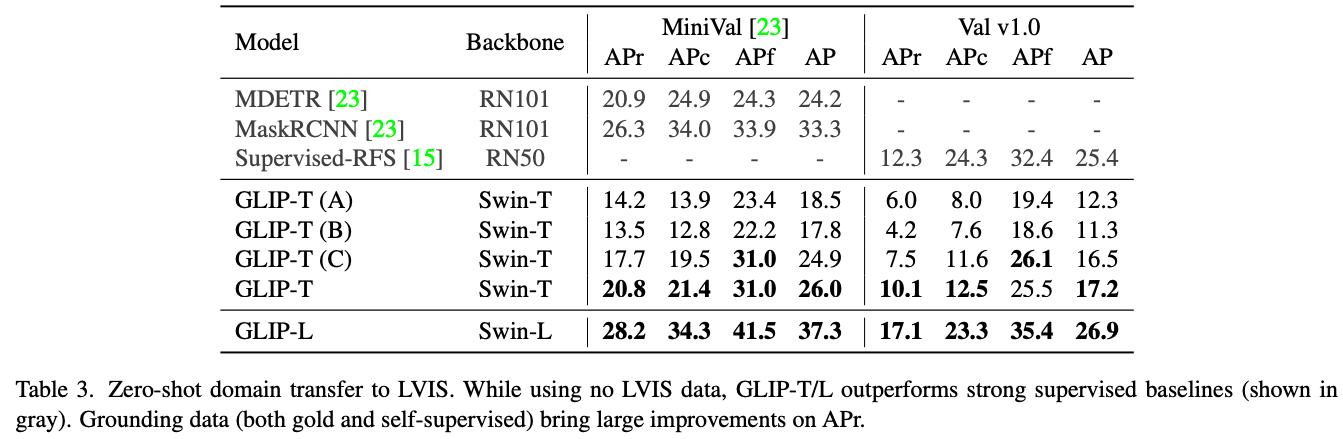
Grounded Language-Image Pre-training论文笔记
Title:Grounded Language-Image Pre-training Code 文章目录 1. 背景2. 方法(1)Unified Formulation传统目标检测grounding目标检测 (2)Language-Aware Deep Fusion(3)Pre-training with Scala…...

成集云 | 钉钉财务费用单同步至畅捷通 | 解决方案
源系统成集云目标系统 方案介绍 财务管理作为企业管理中重要的组成部分,在企业的发展和成长中扮演着重要角色,成集云以钉钉费用单OA审批与畅捷通TCloud系统为例,与钉钉连接器深度融合,通过数据处理和字段匹配实现了费用…...

Redis——》死锁
推荐链接: 总结——》【Java】 总结——》【Mysql】 总结——》【Redis】 总结——》【Kafka】 总结——》【Spring】 总结——》【SpringBoot】 总结——》【MyBatis、MyBatis-Plus】 总结——》【Linux】 总结——》【MongoD…...

基于Rust与Candle的AI推理引擎cria:简化大模型本地部署与优化
1. 项目概述:从“左移”到“创造”的AI推理引擎 最近在折腾AI模型本地部署和推理优化的朋友,可能都绕不开一个名字: cria 。这个由 leftmove 开源的项目,全称是“Cria: The AI Inference Engine”,直译过来就是“创…...

基于RP2040与I2C总线打造可编程合成器吉他:从硬件到固件的完整实践
1. 项目概述:打造你的第一把可编程合成器吉他 如果你对电子音乐制作和嵌入式硬件开发都感兴趣,那么将两者结合的DIY项目无疑是最迷人的领域。今天要分享的,就是基于Adafruit RP2040 PropMaker Feather微控制器,从零开始打造一把功…...

基于WLED分段功能与激光切割的多层智能艺术灯板制作全攻略
1. 项目概述与核心价值如果你和我一样,对那种能随着音乐呼吸、或者能独立变换不同区域色彩的智能灯光装置着迷,那么你一定会喜欢这个项目。它远不止是把LED灯条粘在板子后面那么简单,而是将激光切割的精密工艺、分层的艺术设计,与…...

ARM处理器仿真技术:Cortex-R52与Neoverse实战解析
1. ARM处理器仿真技术概述在现代芯片设计和软件开发流程中,处理器仿真模型已成为不可或缺的关键工具。作为Arm生态系统的重要组成部分,Iris仿真组件提供了对Cortex-R52和Neoverse系列处理器的精确模拟能力。这些模型不仅能够模拟指令执行流程,…...

30亿条出行记录解密:如何用纽约出租车数据洞察城市脉搏 [特殊字符][特殊字符]
30亿条出行记录解密:如何用纽约出租车数据洞察城市脉搏 🚖📊 【免费下载链接】nyc-taxi-data Import public NYC taxi and for-hire vehicle (Uber, Lyft) trip data into a PostgreSQL or ClickHouse database 项目地址: https://gitcode.…...

告别命令行启动!在Ubuntu 20.04上为Clion创建桌面快捷方式的保姆级教程
告别命令行启动!在Ubuntu 20.04上为Clion创建桌面快捷方式的保姆级教程 每次打开Clion都要在终端输入./clion.sh?作为从Windows转战Linux的开发者,这种操作简直让人抓狂。本文将彻底解决这个痛点,手把手教你用.desktop文件创建专业…...

智能合约如何重塑AI服务信任:去中心化执行与验证架构解析
1. 项目概述:当AI技能遇上智能合约最近在探索AI与区块链结合的前沿领域时,我遇到了一个非常有意思的项目:saralobo/skill-ai-execution-contract。这个名字乍一看有点复杂,但拆解开来,核心就是“技能”、“AI执行”和“…...

深度学习训练理论:初始化与梯度消失
深度学习训练理论:初始化与梯度消失 1. 技术分析 1.1 训练挑战概述 深度学习训练面临多种挑战: 训练挑战梯度消失: 梯度趋近于0梯度爆炸: 梯度过大参数初始化: 权重初始化影响激活函数选择: 影响梯度流动1.2 梯度消失原因 原因机制影响激活函数sigmoid/t…...

从“客户匿名”到“可验证”:技术服务案例的工程化写法
在撰写技术服务案例时,我们经常面临一个挑战:客户要求匿名,但案例又需要让潜在客户相信效果。如何平衡?结合文澜天下科技在AI搜索优化项目中的实践,分享一种“可验证”的案例写法。一、定位具体行业和场景 不写“某教育…...

【197期】视频一键转图文笔记
这期分享一个自己一直在用的视频转图文笔记工具,把视频文件和对应的字幕文件拖进去,一键就能生成详细的图文笔记。目前自媒体平台上的文章基本都靠这个流程来出,不用另外再写一遍,效率高了很多。使用方式很简单,把视频…...