半导体晶片机器视觉测量及MARK点视觉定位
半导体晶片机器视觉测量及MARK点视觉定位
客户的需求:
检测内容:
SMT行业晶片位置角度与PCB板Mark点位置的测试测量
检测要求:
精度0.04mm,移动速度100mm/s

视觉可行性分析:
对样品进行了光学实验,并进行图像处理,原则上可以使用机器视觉系统进行测试测量与定位。
结果:
对所有样品进行分析,可以在不同的样品尺寸与位置下测量出晶片的大小与质心点位置、旋转角度,以及MARK点的位置等。
使用的LED光源、工业相机、工业镜头等硬件的具体信息,请参看下面的内容,默认为晶片测量、MARK点测量为独立的两套机器视觉系统,如果需要整合,可以酌情考虑删减某些硬件配置。
测试条件:
产品测试时,视场留有一定的包容空间,但这不意味着在视场内就一定能得到非常准确的测量数据。原则上需要机器视觉系统有较精密的定位与固定装置。
使用硬件:
LED光源:CSR-7060-DRLr 1个……用于晶片定位
LED光源:CSR-5060-DRLr 1个……用于Mark点
光源控制器:CSR-24T2-SPV 2个……用于控制光源
工业相机:Guppy F-033B 1个……用于晶片定位
工业相机:HV-1351UM 1个……用于Mark点
相机电缆:3米1394A线 1条……用于数据传输
相机电缆:3米USB线带锁定 1条……用于数据传输
图像采集卡:1394A卡 1块……用于采集图像
工业镜头:VS-2514 1个……用于晶片定位
工业镜头:CSR-2X110 1个……用于Mark点
光学延长管:5mm 1个……用于晶片定位
晶片安装条件:
光源工作距离:95mm,光源发光表面到目标表面的距离
相机工作距离:130mm,相机镜头表面到目标表面的距离
视场:24*18mm,实际能看到的视野大小
Mark点安装条件:
光源工作距离:85mm,光源发光表面到目标表面的距离
相机工作距离:110mm,相机镜头表面到目标表面的距离
视场:3.5*2.6mm,实际能看到的视野大小
最优化方案
在这里,我们将告诉您,为什么选择这样的硬件,选择这些硬件的有什么好处。
LED光源 CSR-7060-DRLr & CSR-5060-DRLr
晶片的检测,因为产品大小不一,大的有16mm以上的产品,小的有1mm以下的产品,因此需要一款较大一点的光源产品;经过实验,发现使用CSR-7060-DRLr光源比使用CSR-7090-DRLr更理想。这样可以提供更加集中的亮度,可以使工作距离更短,缩小机台的空间。
Mark点的检测,因为目标本身比较小,1~2mm的大小,我们使用直径为42mm的环形光源来照明,即可满足要求。
光源控制器 CSR-24T2-SPV
光源需要相应的供电设备,一般工业使用模拟控制器或数字控制器就足够了,这里我们使用凯瑞斯的频闪控制器进行供电。频闪控制器可以在10μs~999μs内使光源发出远高于正常亮度几倍的亮度,这样可以使相机在低于频闪的曝光时间内曝光正常,从而图像明亮,无拖影,对测量精度的影响非常小。而如果相机的曝光时间太长,而目标运动太快,将严重的拖影,会严重影响测量精度。我们的机台运动速度在100mm/s,即100μm/ms。如果曝光时间为1ms,则在这曝光的1ms内,物体要走100μm的距离,这对于我们测量要求的40μm的测量误差是完全不可以实现的。所以我们需要将曝光时间调整到μs级这个级别上,如果是100μs(0.1ms),则物体走过10μm,那样物体运动所引起的测量误差才会降低到系统所能接受的范围。
工业相机 Guppy F-033B & HV-1351UM
晶片视觉定位
F-033B是一款30万像素的进口工业CCD相机,使用1394A接口,在一台计算机上同时使用多台相机采集;它的速度为58FPS,可以实现高速测试测量。此款相机的分辨率为656*494,我们拍摄的视场是24*18mm,则我们系统的像素分辨率为24mm/656pixel=0.0366mm/pixel,经过我们实验,同一产品在视场中的不同位置出现如左右、前后、上下倾斜,或在视场中不同位置平移,只有不到1个像素的变化,即同一产品的重复测量精度为在0.0366mm内容,在我们要求的0.04mm范围内。因此基本在我们的要求范围内,通常我们建议相机的分辨率精度比我们要求的精度要高一倍,即我们推荐使用130万像素的工业CCD相机。推荐型号,使用Guppy F-146B(工业140万像素CCD进口相机)。如果觉得CCD工业相机成本过高,而对于测量精度没有那么高的要求,可以使用CMOS相机代替,我们推荐使用Guppy F-036B(进口30万像素CMOS相机),或者是使用HV-1351UM(国产130万像素CMOS相机)。
Mark点视觉定位
HV-1351UM是一款国产的USB接口130万像素CMOS工业相机,速度为15FPS,输出端带螺丝锁定功能,适合于安装固定在运动机构上而不会使接口松动。对于定位MARK点这样精度要求不是十分高的测试测量场合,非常适合。当然,对于晶片定位,如果要求不太高,也可以使用此款相机。
工业镜头 VST-2514 & CSR-2X110
晶片视觉定位
VST-2514H是一款大光圈的定焦百万像素镜头,对于测量尺寸成像非常好,较低的边缘枕型或桶型畸变,而且它是百万像素的镜头,与相机完全匹配。方便的对焦调节,对机台的要求不会太苛刻。使用这款镜头,可以将工作距离控制在130mm左右,对于整个机台的空间,要求比较小。由于晶片定位时,相机、镜头、光源都是在机台下面固定位置,不会来回的运动,因此,可以调整光源、对焦位置将会更方便。
Mark点视觉定位
Mark点的定位,相机、光源、镜头通常是安装在运动平台上,经常需要运动来拍照,因此当运动机构高速运动时,如果镜头、相机上有太多的螺丝接合部分时,将会有松动的可能。因此我们选择相机时,使用带锁定的相机比较理想,而镜头,我们则使用CSR-2X110远心放大镜头。这是一款2X的远心镜头,可以得到较小的视野,而且上面没有光圈、对焦调节圈,安装好后,无光学变化的担忧。
测试结果画面
同一产品不同位置测试结果:



不同产品测试结果:





Mark点测试结果:
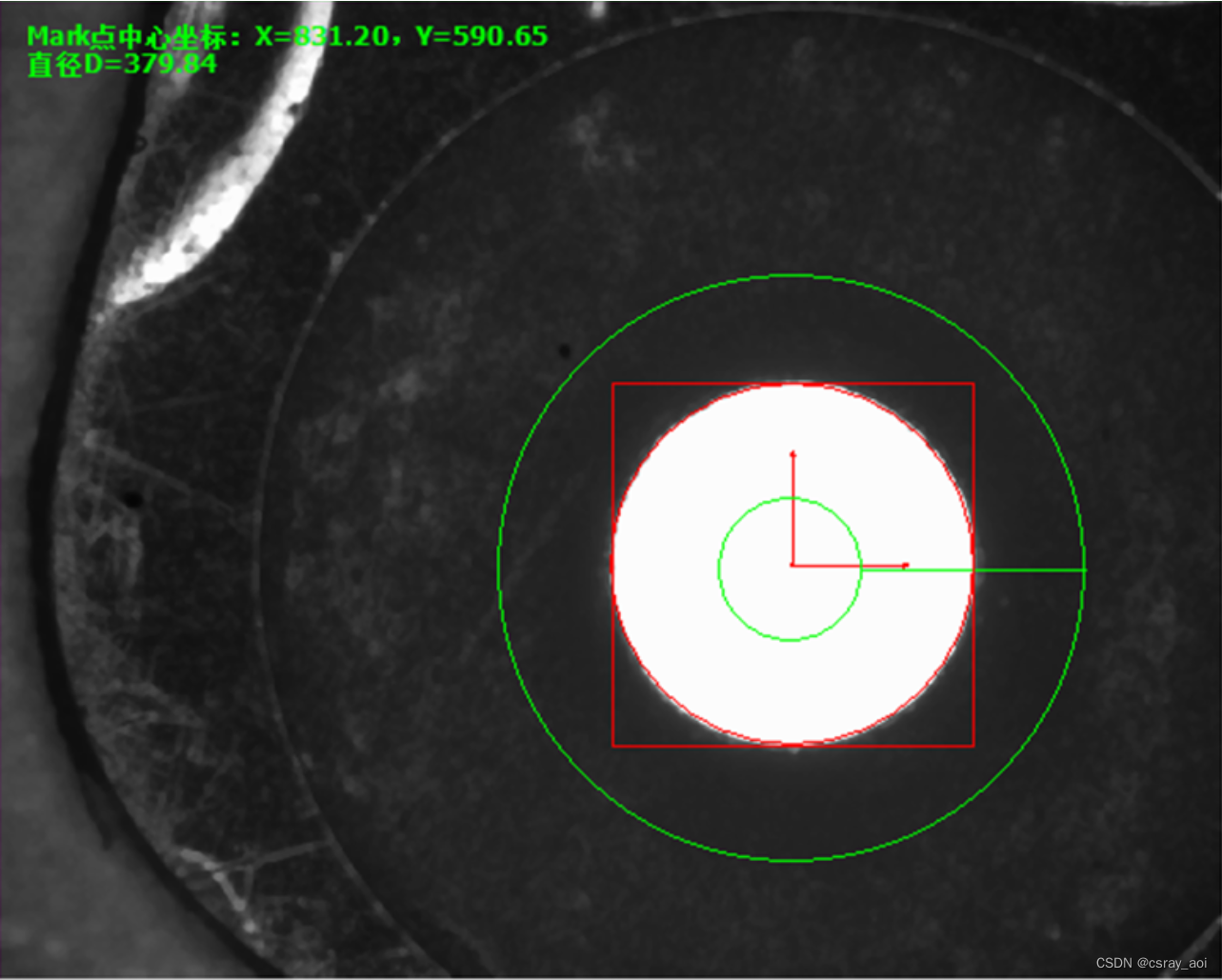
上面的组图可以看到,无论是晶片的定位还是MARK点的定位,机器视觉系统通过选用适当的硬件配置,都能达到测量要求。
相关文章:
半导体晶片机器视觉测量及MARK点视觉定位
半导体晶片机器视觉测量及MARK点视觉定位 客户的需求: 检测内容: SMT行业晶片位置角度与PCB板Mark点位置的测试测量 检测要求: 精度0.04mm,移动速度100mm/s 视觉可行性分析: 对样品进行了光学实验,并进行图像处理,…...
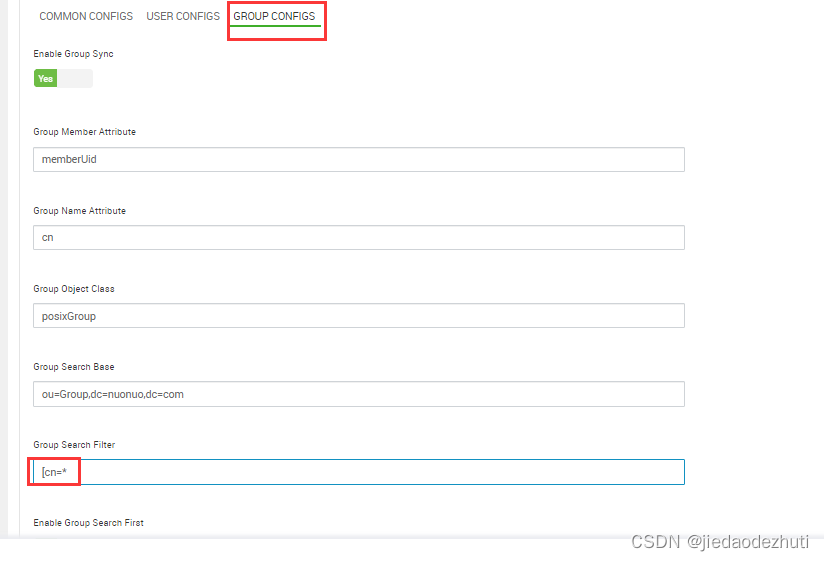
ranger无法同步用户问题解决
1.首先就是定位日志,日志目录 cd /var/log/ranger/usersync 定位到问题报错如下: LdapDeltaUserGroupBuilder.getUsers() failed with exception:java.naming.AuthticationExceptiom :[LDAP:error code 49 - Invalid Credentials]:remaing name ‘ouPeople,dc*.dccom’ 解决办法…...
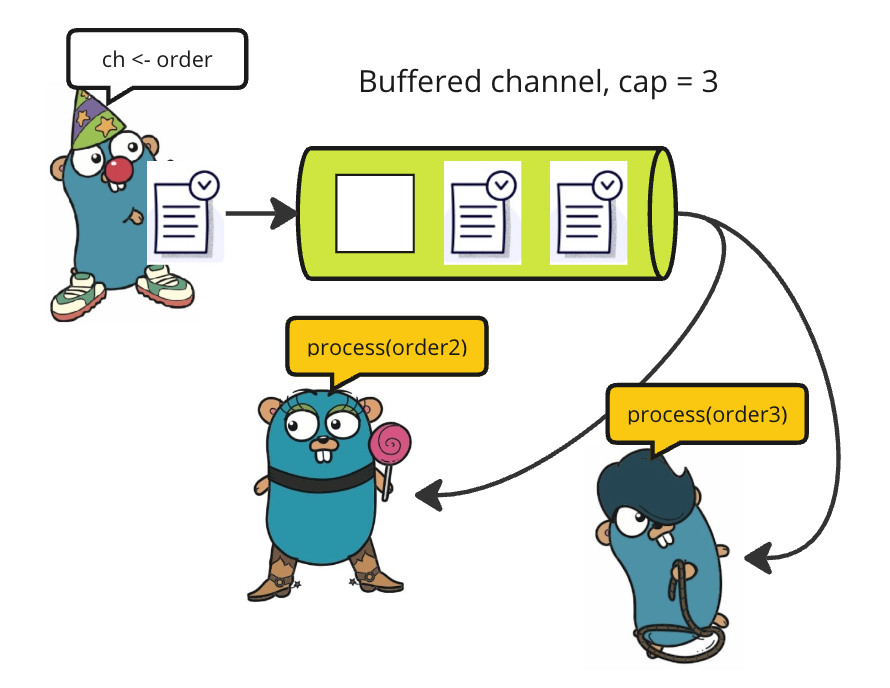
使用通信顺序进程(CSP)模型的 Go 语言通道
在并发编程中,许多编程语言采用共享内存/状态模型。然而,Go 通过实现 通信顺序进程(CSP)模型来区别于众多。在CSP中,程序由不共享状态的并行进程组成;相反,它们通过通道进行通信和同步操作。因此…...
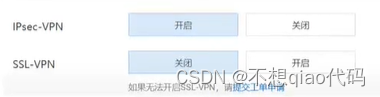
VPN网关
阿里云VPN网关(VPN Gateway,简称VPN)是一款基于Internet,通过加密通道将企业数据中心、办公网或终端与专有网络(VPC) 安全可靠连接起来的服务。 VPN网关提供IPsec-VPN和SSL-VPN两种。 网络连接方式应用场景IPsec-VPN支持在企业本地数据中心、企业办公网…...

产品展示视频制作的要点
制作产品展示视频时通过精心策划的视频剧本和拍摄手法,可以准确地呈现活动的目的、主题和特点,让观众更好地理解和认同活动的意义。深圳产品活动视频制作公司老友记小编还为您整理了以下一些重要的制作要点: 1.明确目标受众:了解你…...

appium+python自动化测试
获取APP的包名 1、aapt即Android Asset Packaging Tool,在SDK的build-tools目录下。该工具可以查看apk包名和launcherActivity 2、在android-sdk里面双击SDK-manager,下载buidl-tools 3、勾选build-tools,随便选一个版本,我这里选的是24的版…...

【AI辅助办公】PDF转PPT,移除水印
PDF转PPT 将PDF上传链接即可转换成PPT。 https://www.camscanner.com/pdftoppthttps://www.camscanner.com/pdftoppt移除水印 第一步:打开视图-宏 第二步:输入宏名(可以是人以文字…...
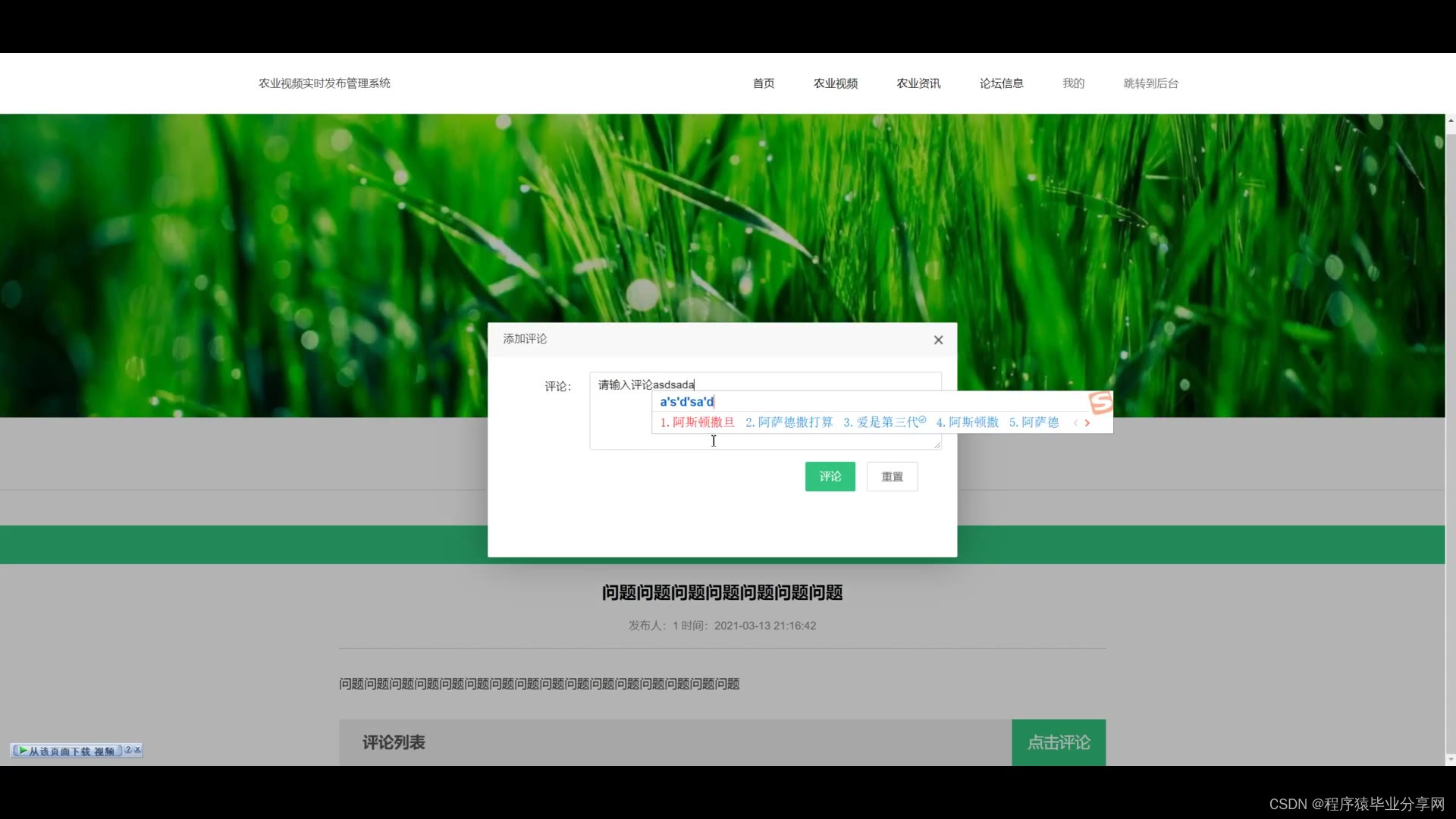
ssm农业视频实时发布管理系统源码
ssm农业视频实时发布管理系统源码108 开发工具:idea 数据库mysql5.7 数据库链接工具:navcat,小海豚等 技术:ssm package com.controller;import java.io.File; import java.io.FileNotFoundException; import java.io.IOException; impo…...

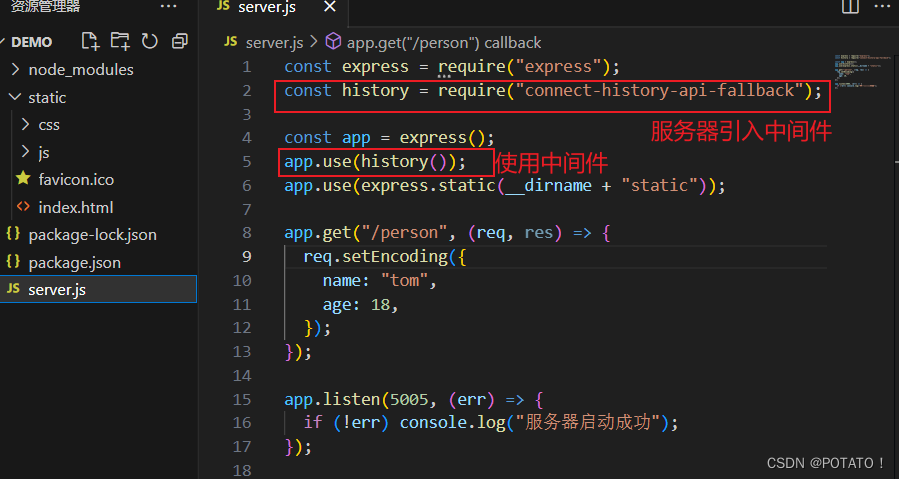
【100天精通python】Day48:python Web开发_WSGI接口与使用
目录 1 WSGI接口 1.1 CGI 简介 1.2 WSGI 简介 1.3 定义 WSGI 接口 1.3.1 应用程序(Application) 1.3.2 服务器(Server) 1.4 WSGI 接口的使用示例 1.5 WSGI接口的优势 1 WSGI接口 上一节实现了静态服务器,但是当…...

Understanding Lockup Cells
工具会分析扫描链和EDT逻辑之间的控制时序元素的时钟的时序关系,当必须要同步时钟并保持数据完整性时插入边沿触发寄存器(lockup cells)。 可以使用report_edt_lockup_cells命令来展示工具已经插入的lockup cells的详细报告。 Lockup Cell Insertion 工具会分析控制时序元…...

javaCV实现java图片ocr提取文字效果
引入依赖: <dependency><groupId>org.bytedeco</groupId><artifactId>javacv-platform</artifactId><version>1.5.5</version></dependency> 引入中文语言训练数据集:chi_sim GitHub - tesseract-ocr…...
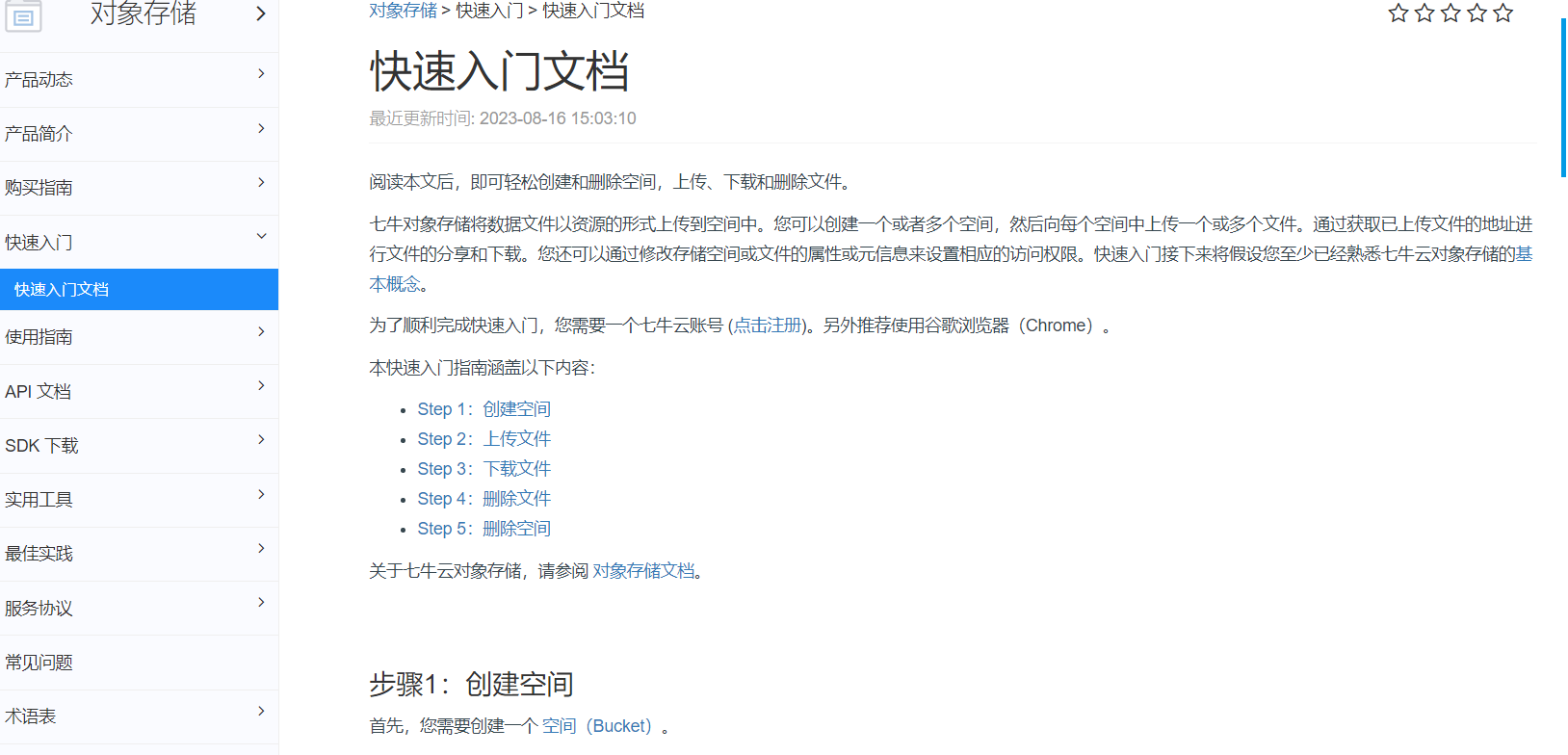
七牛云OSS存储
前言: 七牛云的存储项目的附件,需要开发一套七牛云的工具类,可以使用该工具类进行七牛云服务器进行文件的上传与下载操作; 七牛云的文档学习: 相关的依赖项的配置: <dependency><groupId>com.amazonaws</groupId><artifactId>aws-java-sdk-s3…...
11.物联网lwip,网卡原理
一。LWIP协议栈内存管理 1.LWIP内存管理方案 (1)堆heap 1.灰色为已使用内存 2.黑色为未使用内存 3.紫色为使用后内存 按照某种算法,把数据放在内存块中 (2)池pool 设置内存池,设置成大小相同的内存块。 2…...
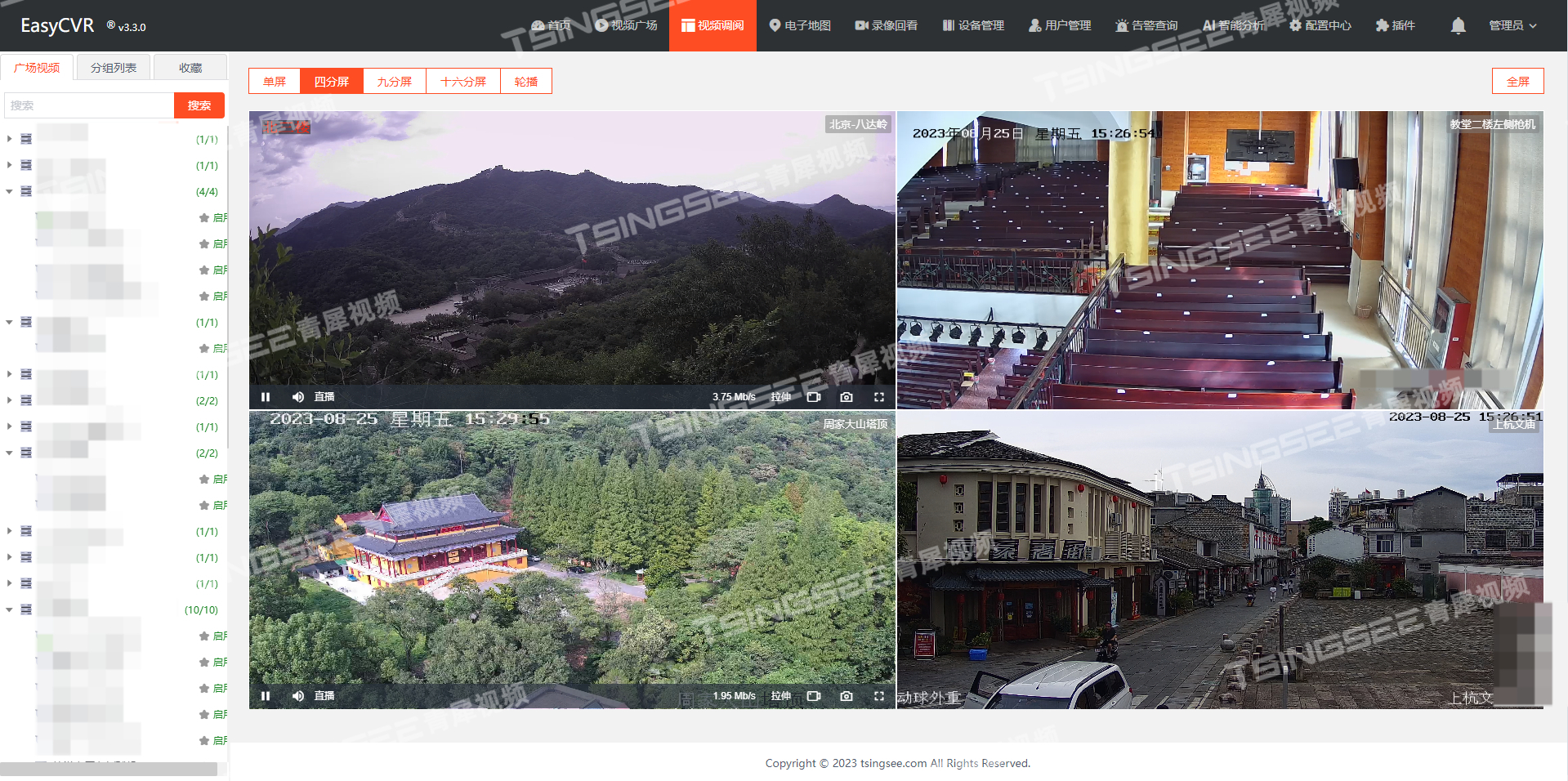
视频监控/视频汇聚/视频云存储EasyCVR平台接入华为ivs3800平台提示400报错,该如何解决?
开源EasyDarwin视频监控TSINGSEE青犀视频平台EasyCVR能在复杂的网络环境中,将分散的各类视频资源进行统一汇聚、整合、集中管理,在视频监控播放上,视频云存储/安防监控汇聚平台可支持1、4、9、16个画面窗口播放,可同时播放多路视频…...
WordPress主题Zing V2.2.1/模块化WordPress响应式通用企业商城主题
WordPress主题Zing V2.2.1,模块化WordPress响应式通用企业商城主题。 功能介绍 百度熊掌号文章实时推送、原创保护 多设备支持自适应布局,支持电脑、Pad、手机以及各种浏览器 SEO优化首页、文章、页面、分类均支持自定义标题、关键字和描述 速度优化…...

【无需公网IP】在树莓派上搭建Web站点
目录 1.概述 2.使用 Raspberry Pi Imager 安装 Raspberry Pi OS 3.设置 Apache Web 服务器 3.1测试 web 站点 3.2安装静态样例站点 3.3将web站点发布到公网 3.4安装 Cpolar 3.5cpolar进行token认证 3.6生成cpolar随机域名网址 3.7生成cpolar二级子域名 3.8将参数保存…...
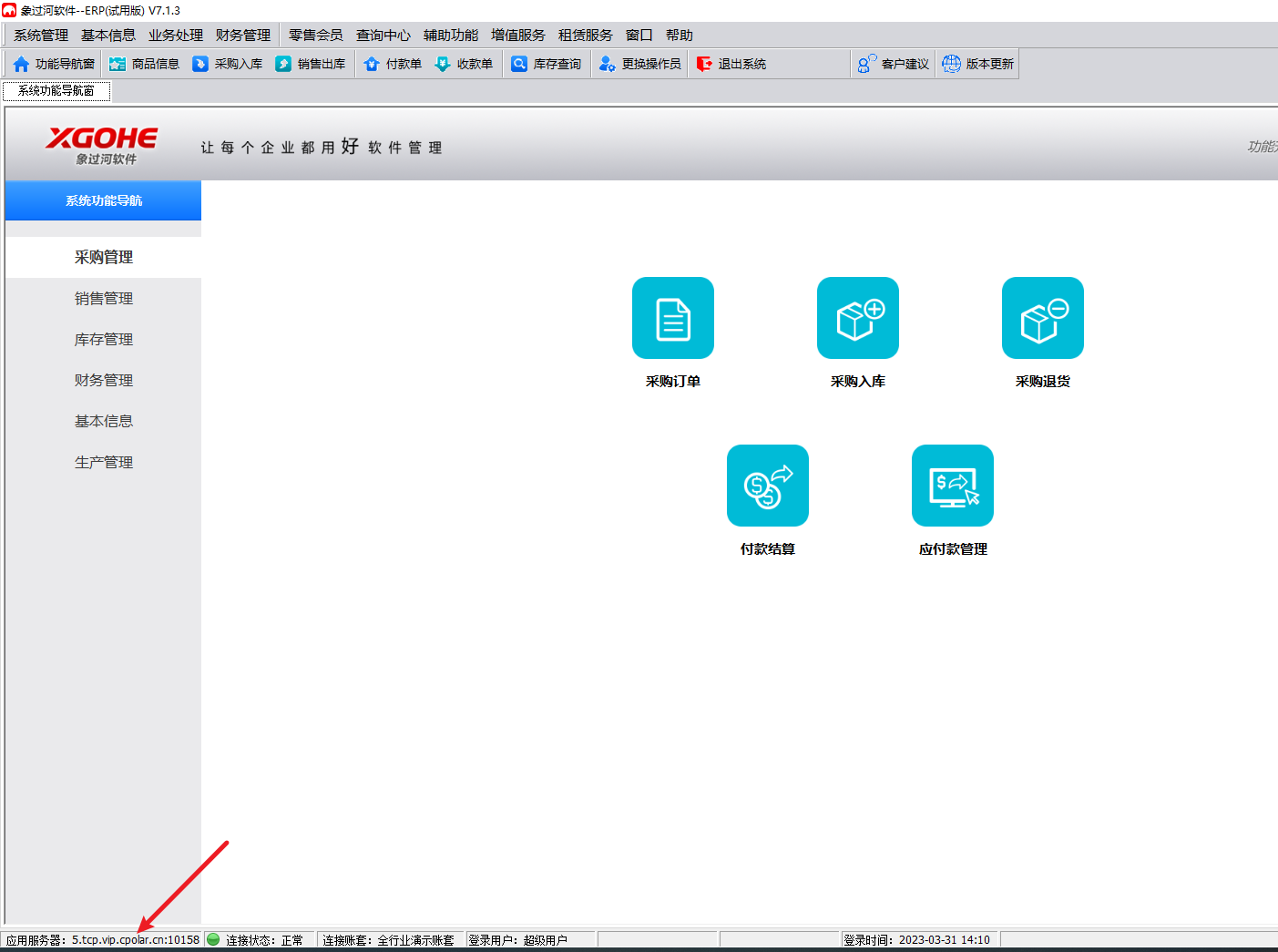
出差在外,远程访问企业局域网象过河ERP系统「内网穿透」
文章目录 概述1.查看象过河服务端端口2.内网穿透3. 异地公网连接4. 固定公网地址4.1 保留一个固定TCP地址4.2 配置固定TCP地址 5. 使用固定地址连接 概述 ERP系统对于企业来说重要性不言而喻,不管是财务、生产、销售还是采购,都需要用到ERP系统来协助。…...
Vue2-replace属性、编程式路由导航、缓存路由组件、两个新的生命周期钩子、路由守卫、路由器工作模式
🥔:如果事与愿违,那一定是上天另有安排 更多Vue知识请点击——Vue.js VUE2-Day13 router-link的replace属性编程式路由导航1、什么是编程式路由导航2、如何编码3、使用案例示例说明 缓存路由组件两个新的生命周期钩子路由守卫1、路由元信息2、…...

C语言:指针的运算
一、指针 或 - 整数 指针 或 - 整数表示指针跳过几个字节(具体跳过几个字节由指针类型决定) 本文不做具体讲解,详解跳转链接: 《C语言:指针类型的意义》 二、指针 - 指针 前提条件:指针类型相同并且指向同…...

设计模式的使用——模板方法模式+动态代理模式
一、需求介绍 现有自己写的的一套审批流程逻辑,由于代码重构,需要把以前的很多业务加上审批的功能,再执行完审批与原有业务之后,生成一个任务,然后再统一处理一个任务(本来是通过数据库作业去处理的&#x…...

数据鲸鱼具身智能task3
我的理解:模型广场提供了模型的雏形与底座,是一些已经85分的通用模型,各任务可以基于这里的模型去试验,根据试验的结果(这里就到了数据管理)发现数据的偏向或侧重点不同,根据这种数据的表现差异…...

Unity风格化木质道具包:模块化建模与多管线材质优化方案
1. 这个木质道具包到底解决了什么实际问题?在Unity项目开发中,尤其是独立游戏、原型验证或教育类场景里,“缺模型”是高频痛点。不是所有团队都有建模师,也不是每个项目都值得为几十个木头物件专门外包或花两周时间从零建模。我做…...

如何用OpCore-Simplify在10分钟内完成黑苹果自动化配置:终极指南
如何用OpCore-Simplify在10分钟内完成黑苹果自动化配置:终极指南 【免费下载链接】OpCore-Simplify A tool designed to simplify the creation of OpenCore EFI 项目地址: https://gitcode.com/GitHub_Trending/op/OpCore-Simplify 还在为复杂的黑苹果配置而…...

Aube:下一代 Node.js 包管理器,性能远超 pnpm
好的,我已经为您整理了关于新一代 Node.js 包管理器 Aube 的详细介绍文章。文章基于您提供的摘要和 GitHub 仓库的详细文档,扩充了功能介绍、使用场景和命令参考,以形成一个完整的详情页面。 Aube:下一代 Node.js 包管理器&#x…...

GEO优化避坑指南:告别关键词堆砌,用实体权威与结构化数据抢占AI推荐位
最近很多做技术的同行在后台问我:“为什么我写了那么多文章,AI搜索还是搜不到我的品牌?”这其实陷入了一个典型的误区:把GEO当成了换皮的SEO。在生成式AI时代,靠关键词堆砌和低质内容轰炸不仅无效,反而可能…...

Red Hat Enterprise Linux 10.2 和 9.8 发布,命令行 AI 辅助增强,多工具集性能升级
Red Hat Enterprise Linux (RHEL) 10.2 和 9.8 正式发布,带来增强的命令行 AI 辅助和基础架构更新,提升用户信息获取速度与工具性能。命令行 AI 辅助升级面向高级用户推出 goose 命令,它是高级可选命令行 AI 助手,连接可信 AI 后端…...
)
别再被‘pip不是内部命令’搞懵了!Python新手必看的pip安装与修复保姆级教程(附ensurepip用法)
Python包管理革命:从pip失效到ensurepip的深度实践指南 为什么你的pip命令突然"罢工"了? 刚接触Python的新手们常常会遇到一个令人抓狂的问题——昨天还能正常使用的pip命令,今天突然提示"不是内部或外部命令"。这就像突…...
)
ElevenLabs湖北话语音合成:从零部署到商用级TTS的7大避坑步骤(附武汉/宜昌/襄阳三方言测试数据)
更多请点击: https://kaifayun.com 第一章:ElevenLabs湖北话语音合成的技术定位与方言价值 ElevenLabs 作为全球领先的AI语音生成平台,其核心能力聚焦于高保真、情感化、多语言的文本到语音(TTS)合成。尽管官方尚未正…...

初次使用Taotoken模型广场进行选型与测试的直观感受
🚀 告别海外账号与网络限制!稳定直连全球优质大模型,限时半价接入中。 👉 点击领取海量免费额度 初次使用Taotoken模型广场进行选型与测试的直观感受 作为一名需要接入大模型能力的开发者,面对市场上众多的模型提供商…...

7天职场内耗清零打卡计划
7天职场内耗清零打卡计划(极简好坚持)每天 3 件小事,不累不费脑,7 天稳住心态第一天:断胡思乱想别人随口一句话,当场听完就翻篇,绝不反复琢磨上班只盯自己手头事,不偷看别人忙不忙、…...