高速公路自动驾驶汽车超车控制方法研究
目录
摘要 ............................................................................................................ I
Abstract ...................................................................................................... II
目录 ......................................................................................................... IV
第1 章 引言 ........................................................................................... 1
1.1 研究背景及意义 .......................................................................................... 1
1.2 国内外研究现状 .......................................................................................... 2
1.3 自动驾驶汽车超车控制方法研究现状 ...................................................... 5
1.4 研究内容与技术路线 .................................................................................. 9
第2 章 自动驾驶汽车超车行为决策机制研究 ................................. 12
2.1 自动驾驶汽车基于高速公路环境的系统框架 ........................................ 12
2.2 自动驾驶超车行为决策框架 .................................................................... 14
2.3 基于有限状态机的超车行为建模 ............................................................ 16
2.4 本章小结 .................................................................................................... 19
第3 章 自动驾驶汽车超车轨迹规划 ................................................. 20
3.1 超车行为特性研究 .................................................................................... 20
3.2 自动驾驶汽车换道安全距离 .................................................................... 21
3.3 车辆换道运动轨迹规划 ............................................................................ 25
3.4 超车运动轨迹规划 .................................................................................... 34
3.5 本章小结 .................................................................................................... 37
第4 章 自动驾驶汽车换道超车轨迹跟踪 ......................................... 38
4.1 模型预测控制简介 .................................................................................... 38
4.2 自动驾驶汽车动力学模型建立 ................................................................ 40
4.3 基于模型预测控制的轨迹跟踪器设计 .................................................... 42
4.4 自动驾驶汽车轨迹跟踪仿真实验 ............................................................ 46
4.5 本章小结 .................................................................................................... 52
第5 章 自动驾驶汽车超车方法验证 ................................................. 53
5.1 自动驾驶汽车超车模型搭建 .................................................................... 53
5.2 超车结果分析 ............................................................................................ 56
5.3 本章小结 .................................................................................................... 59
第6 章 结论 ......................................................................................... 60
6.1 研究总结 .................................................................................................... 60
6.2 研究展望 .................................................................................................... 61
致谢 ......................................................................................................... 62
参考文献 ................................................................................................. 63
攻读学位期间获得与学位论文相关的科研成果 ................................. 67
第1 章 引言
1.1 研究背景及意义
汽车发展改变人的生活。自1885 年德国工程师卡尔奔驰发明第一辆汽油发动机汽车,1913 年美国福特公司大批量生产汽车,汽车业经历一个多世纪的发展,逐步形成如今的精细化生产——在模块化通用平台上实现跨车型跨级别规模生产,包括从车体架构到汽车功能模块划分、标准设计、个性化定制、柔性制造、灵活组装和敏捷生产。汽车制造业的核心竞争力从19 世纪的底盘、轮胎、机械、传动、车身,发展到20 世纪的发动机、能源排放、电气、被动安全,到如今的模块化、汽车电子、主动安全、智能驾驶。在互联网、人工智能等产业飞速发展的背景下,电子信息技术正在挑战脱离驾驶员驾驶汽车的状态,自动驾驶汽车技术可减少安全事故、缓解驾驶员疲劳,可望改变整个汽车工业和改善交通状况。
国内外科研机构早在上世纪就开始了自动驾驶技术的研究。从20 世纪70 年代开始,美国、英国、德国等发达国家开始进行自动驾驶研发。近年来,各大企业争相参与自动驾驶技术的研究,并陆续开展了路测试验,推动自动驾驶技术迅猛发展。我国自动驾驶技术研发稍晚,1992 年国防科技大学成功研制出中国第一辆真正意义上的无人自动驾驶汽车,2005 年上海交通大学成功研制首辆城市自动驾驶汽车。
自动驾驶汽车技术涉及人工智能、车辆工程、自动控制、机器视觉等多学科交叉研究。其利用摄像头、雷达、导航系统等多传感器感知车辆所处交通环境,自动规划出一条安全可靠的行驶轨迹,实现自动驾驶汽车在道路上自主行驶。超车是一种常见的驾驶行为,是指在同一车道上,后车为最求更快的行驶速度、更大的行驶空间及更短的行驶时间,从前车侧向超越前车并回到本车道的行为。超车作为一种比较复杂的驾驶行为,存在巨大的安全隐患。自动驾驶汽车超车技术通过采集与分析大量数据,包括车辆行车速度、位置、周围环境等,能更好替代驾驶员进行更为安全的超车决策与控制,以减少车辆超车过程中发生交通事故的风险,也能同时兼顾车辆平顺性,给乘客更舒适的超车体验。自动驾驶汽车超车技术研究在实现无人驾驶这一目标的过程中不可或缺,具有重要意义。
1.2 国内外研究现状
1.2.1 国外自动驾驶汽车研究现状
20 世纪80 年代,卡内基·梅隆大学、斯坦福大学、麻省理工学院等美国著名大学与一些科研机构开始自动驾驶汽车的研究。1984 年,美国国防研究计划局(The Defense Advanced Research Project Agency, DARPA)发布“星球大战”战略计划,旨在将超级计算机技术与人工智能技术应用于军事之中,图1-1 为三届DARPA 挑战赛冠军车辆,分别是Sandstorm、Stanley、Boss。同时期,美国交通部(United States Department of Transportation)成立了自动高速公路系统计划(AHS, Automated Highway System),该项目参与者有美国通用公司、伯克利大学与卡耐基梅隆大学。

作为AHS 计划的主要参与者,卡耐基梅隆大学研制出NavLab 系列车辆,图1-2 为NavLab-5 自动驾驶汽车。1995 年智能汽车NavLab-5 完成从匹兹堡到圣地亚哥4585 公里的智能驾驶路测,试验过程中,车辆自主控制方向盘约占总里程98.2%。1987 年,欧洲发起普罗米修斯项目(PROMETHEUS, Programme fora European Traffic of Highest Efficiency and Unprecedented Safety)。该项目由著名大学慕尼黑联邦防军大学、著名企业宝马、奔驰为主要参与者,该项目组于1994年研发智能驾驶汽车VaMP 和VITA-2,并混入高速公路正常车流中行驶,车辆最高时速达130km/h,试验过程中演示了巡线、编队、跟踪、换道超车行驶等项目。相较NavLab-5 加入了方向盘、油门、刹车协同控制。1996 年,意大利帕尔马大学视觉实验室创建ARGO 项目组,该项目逐一利用计算机视觉识别车道标线,进而控制车辆行驶。图1-3 为ARGO 自动驾驶汽车。2010 年,ARGO 试验车沿马可波罗路线,自动驾驶到中国参加上海世博会,总行程15926 公里。
1.2.2 国内自动驾驶汽车研究现状
国内最早开始自动驾驶汽车领域研究的是高等院校。高等院校一方面积极与汽车企业合作,理清从实验室走向产品产业化的实现路径,另一方面在院校内部进行相关技术与产品的孵化。
20 世纪80 年代末,中国各大著名高校,其中包括国防科技大学、清华大学等联合研制出我国第一辆自动驾驶车辆ATB-1(Autonomous Test Bed)。20 世纪90 年代中期,清华大学成立智能汽车研发团队。清华大学李克强教授提出智能汽车发展正往智能化与网联化两个方向发展,前者通过车辆配置传感器感知外部环境,完成“孤岛式”自动驾驶,后者通过车车通信,基础设施信息交换,实
现网联下自动驾驶。两个发展方向都以解放人类双手为最终目标,且最终相互结合成为“智能网联汽车”。智能汽车研发团队与企业合作过程中,主要负责提供系统、基础算法框架,并围绕框架的具体细节与实际行车环境考虑优化。同济大学和上汽集团牵头成立智能型新能源汽车协同创新中心,致力于帮助可以项目产品化。同济大学针对上汽集团的产品规划与行业趋势做探索性基础研究,上汽集团前瞻部则致力于技术产品化。对于智能网联汽车这个跨学科系统工程,协同创新中心将各个学院师生,包括汽车学院、软件学院、电信学院、交通学院、测绘学院,发挥各自优势协同完成项目。2003 年,国防科技大学与一汽集团共同研发红旗CA7460 智能驾驶车辆,在功能上实现自动超车,2006 年研发的第二代智能驾驶汽车HQ3具备自适应巡航、碰撞预警、车道线跟踪等技术,控制精度和稳定性都较第一代有所提高。
中国本土汽车企业响应国家号召,开始参与自动驾驶技术研发。2018 年4月,奇瑞发布“雄狮LION”智能化品牌,该品牌是“124”战略的升级,涉及研发、制造、产品、营销、服务等方面,包括自动驾驶、智能互联、智慧制造、数字营销、移动出行这五个基本点,企图分四个阶段完成完全自动驾驶:2006 年Level1 驾驶辅助、2018 年Level 2 级部分自动驾驶、2020 年Level 3 级有条件自动驾
驶、2025 年Level 4/Level 5 级全自动驾驶。上汽集团在“十三五”规划提出技术“新四化”:电动化、网络化、智能化和共享化,且逐渐形成智能网联汽车自主研发体系,为未来产品业务拓展奠定基础。2015 年,上汽表示将在五年内实现结构化与部分非机构道路自动驾驶,10 年内实现全环境自动驾驶。其自动驾驶技术基于Level 3 级智能车为起点,围绕车辆智能化,多车协作两个主线推进技术发展。2016 年,长安汽车制定“654 战略”,针对智能化板块搭建六大平台(电子电器平台、环境感知与执行平台、决策平台、软件平台、环境测试平台、标准法规平台)、五大核心技术(自动泊车技术、自适应巡航技术、智能网络技术、HMI交互技术)和四阶段实现无人驾驶。
百度公司作为互联网公司,也对智能汽车进行了系统研究,其涉及领域有车联网、高精度地图及自动驾驶软件与算法的开发。百度对智能汽车的研究分为车联网和自动驾驶两个分支。2017 年,百度公司独立出自动驾驶事业部(Level 4),并宣布自动驾驶商业化开源的“Apollo 计划”。
1.3 自动驾驶汽车超车控制方法研究现状
车辆超车是一种常见的驾驶行为,指后方车辆为寻求更快的驾驶速度和更大的驾驶空间,超越前车的驾驶行为。自动驾驶汽车超车是根据周围环境,判断是否符合超车条件,合理规划超车轨迹,然后根据车辆当前姿态、车速信息决策,输出方向盘转角信号,完成超车行为。超车过程涉及换道超车决策、换道超车轨迹规划、换道超车轨迹跟踪等任务。
1.3.1 换道超车行为决策研究现状
早期国内外对驾驶行为决策的研究多停留在仿真阶段,采用的行为逻辑模仿真实的驾驶员驾驶行为习惯。Gipps 是最早对汽车换道行为进行系统研究的,他提出的换道决策模型基于受障碍物、交通指示、重型车辆影响的城郊道路,将决策过程分为换道意图产生、换道条件判断、换道动作执行三个部分,为降低模型复杂度,采用分层决策,使决策符合多方面要求[2]。Hidas 在Gipps 提出的模
型上进行改进,提出SITRAS(Simulation of intelligent Transport Systems)模型,提出间距评估模型,判断换道可行性时基于当前车辆的前后车加减速度是否为可接受,避免本车换道行为对其他交通车产生不利影响[3]。Q.Yang 基于Gipps 的模型框架,提出MITSIM(Microscopic Traffic SIMulator)模型,也是第一个根据环境不同将换道行为分为强制性换道与非强制换道两种,其中对非强制性换道的换道意图产生加入期望车速这一指标。美国联邦公路局提出CORSIM 换道模型,采用两个微观仿真模型,用于不同类型道路,分别是适用于高速道路环境的FRESIM 模型与适用于城市道路环境的NETSIM 模型。FRESIM 模型由动机因素、利益因素和紧急因素组成,NETSIM 模型分为强制性与非强制性两个换道情况,这两个模型建立基于减速度来判断换道时机。
上述模型多将环境简化,并默认所有微观环境信息是可知的,不符合实际情况。且以上模型仅一次考虑驾驶意图,将换道超车行为看做连续动作,未考虑超车行为第二次换道时周围环境是否符合条件。因此,若要构建能应用于自动驾驶汽车的模型,需要更深入的研究。Schubert 等将减速时间作为换道过程决策指标,采用贝叶斯网络评估换道场景和进行换道决策。Wei 等采用预测模型分析动态行车环境,进而辅助车辆在高速公路上完成车道保持或车辆超车等驾驶行为决策,模型采用车辆行驶安全性、舒适性、效率性作为评价指标,且使用成本函数作决策依据,然后用马尔科夫方法提高车辆在不确定行车环境下的驾驶稳定性。Brechtel 等采用马尔科夫方法作为换道决策方法,决策条件采用相对距离、相对速度等可直接测量的物理量,但由于无法预估的系统测量误差,造成决策系统的不稳定性。企业研究方面,宝马基于高速公路研发的自动驾驶ConnectedDrive 项目,Ardelt 等人采用状态机区分不同驾驶行为,并进行分层决策,其中分层决策根据不同的驾驶子任务与驾驶环境定义状态转移条件。
在国内,许多科研机构也对自动驾驶汽车超车行为决策方面进行了深入研究。袁盛玥针对城市环境进行换道规则的研究[9]。Guo M 等基于可行驶区域划分,提出适用于自动驾驶汽车的决策模型,决策模型考虑了其他信息,包括信号灯、周围车辆、行人等[10]。徐优志等基于RBF 神经网络学习真实驾驶员的驾驶特性,得出超车意图产生与判断条件,并基于Prescan 和Matlab/Simulink 搭建仿真实验平台,验证超车决策框架的有效性[11]。
.....需要完整版材料私信
相关文章:
高速公路自动驾驶汽车超车控制方法研究
目录 摘要 ............................................................................................................ I Abstract ...................................................................................................... II 目录 ...............…...
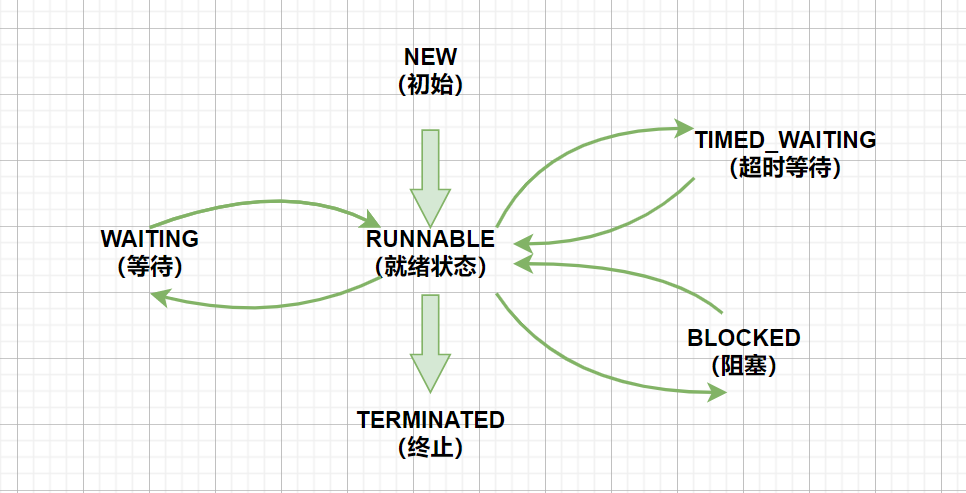
Java 多线程系列Ⅰ(创建线程+查看线程+Thread方法+线程状态)
多线程基础 一、创建线程的五种方法前置知识1、方法一:使用继承Thread类,重写run方法2、方法二:实现Runnable接口,重写run方法3、方法三:继承Thread,使用匿名内部类4、方法四:实现Runnable&…...
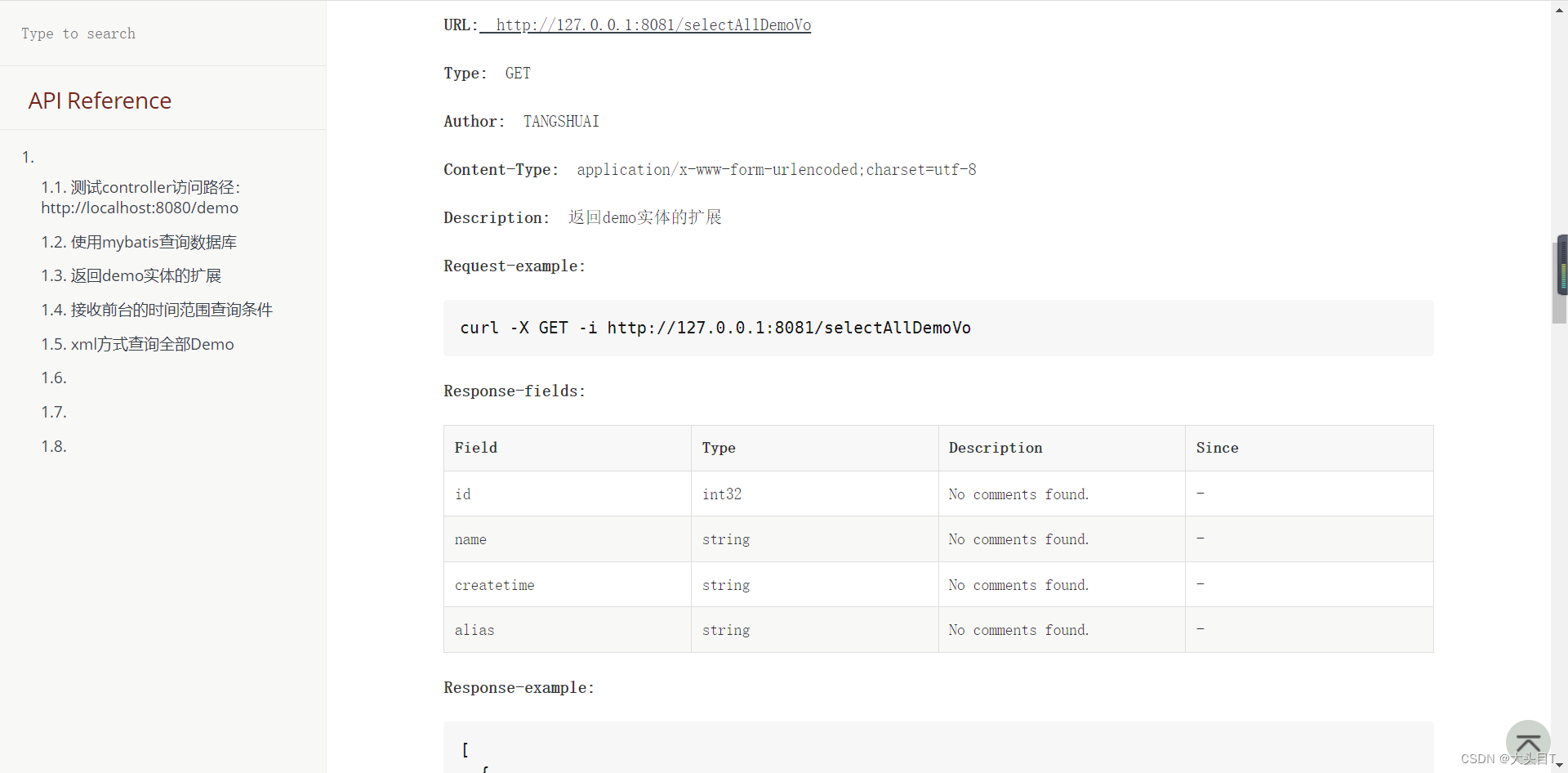
无入侵接口文档smart-doc
Smart-doc优点: 1.非侵入式生成接口文档 2.减少接口文档的手动更新麻烦&保证了接口文档和代码的一致 3.随时可生成最新的接口文档 4.保持团队代码风格一致:smart-doc支持javadoc,必须按照这个才能生成有注释的接口文档 最终效果 1.导入依赖 <pl…...
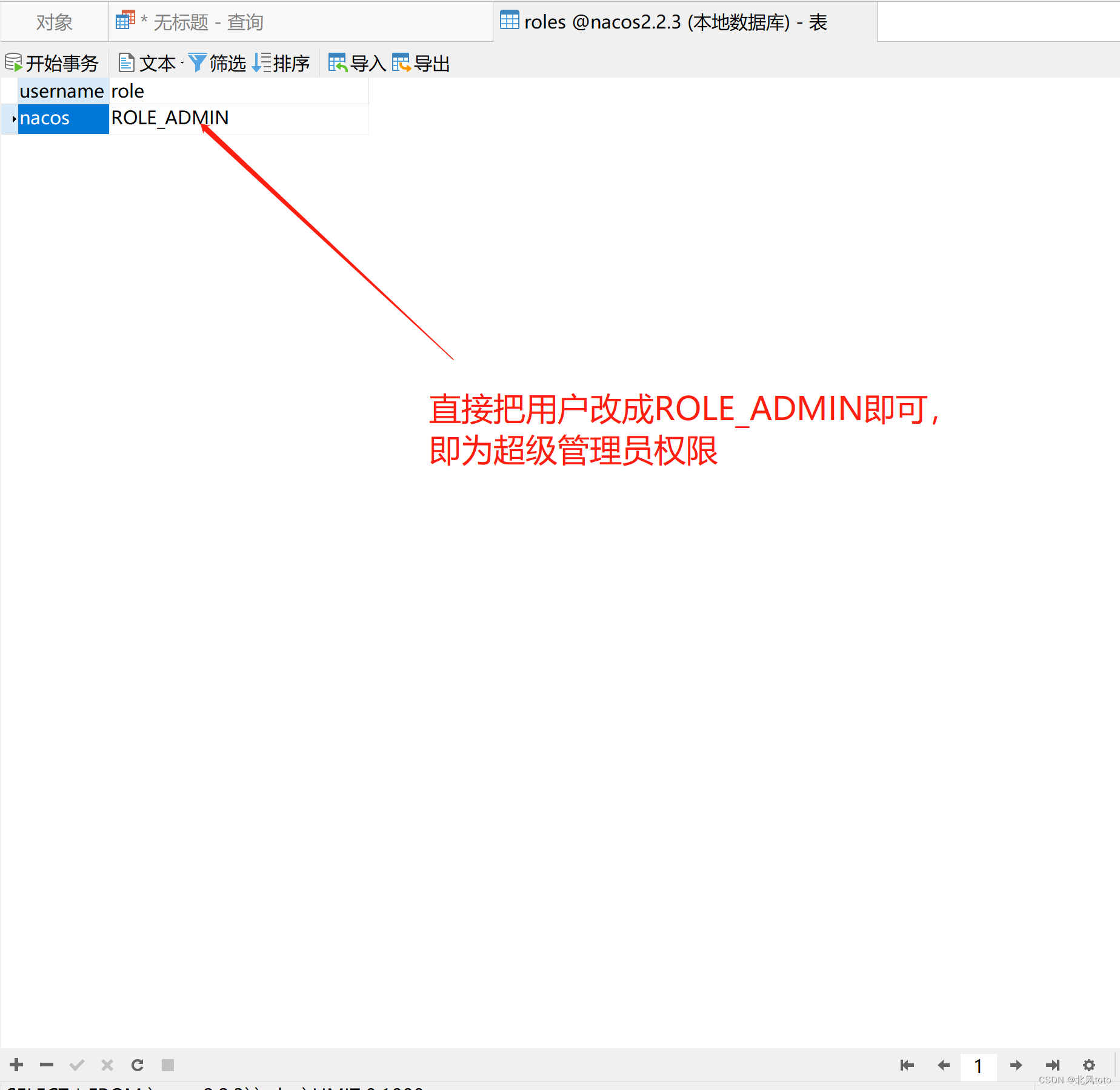
nacos配置超级管理员账户,只能mysql存储数据(或者其他数据库)
nacos本身是不允许授权超级管理员账号的,也就是角色名“ROLE_ADMIN”。作者在页面上试过了,不必再次尝试改的方式是直接改数据库里面的数据...
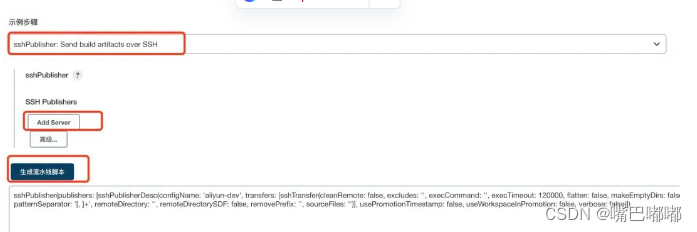
【前端自动化部署】,Devops,CI/CD
DevOps 提到Jenkins,想到的第一个概念就是 CI/CD 在这之前应该再了解一个概念。 DevOps Development 和 Operations 的组合,是一种方法论,并不特指某种技术或者工具。DevOps 是一种重视 Dev 开发人员和 Ops 运维人员之间沟通、协作的流程。…...
【C语言】探讨蕴藏在表达式求解中的因素
🚩纸上得来终觉浅, 绝知此事要躬行。 🌟主页:June-Frost 🚀专栏:C语言 🔥该篇将探讨 操作符 和 类型转换 对表达式求解的影响。 目录: 隐式类型转换算术转换操作符的属性❤️ 结语 隐…...

【Flutter】Flutter 使用 video_player 播放视频
【Flutter】Flutter 使用 video_player 播放视频 文章目录 一、前言二、video_player 简介三、安装和配置四、基本使用五、完整示例 六、高级功能七、总结 一、前言 大家好,我是小雨青年,今天我要和大家分享一款非常实用的 Flutter 包——video_player。…...

如何使用 ChatGPT 快速制作播客和其他长篇内容
使用ChatGPT快速制作播客和其他长篇内容是一个高效且具有一定创造性的过程。以下是一些详细的步骤和技巧,以帮助你充分利用ChatGPT来制作高质量的内容。 一、准备阶段 确定主题或话题:在开始制作之前,你需要明确你的播客或长篇内容将聚焦的主…...

JavaScript基础语法02——JS书写位置
哈喽,大家好,我是雷工! 今天继续学习JavaScript基础语法,JS的书写位置,俗话说:好记性不如烂笔头,边学边记,方便回顾。 1、行内JavaScript 代码写在标签内部 示例: <…...

LInux快捷命令
切换到行头:ctrla 或者 ctrlhome 切换到行尾:ctrale 或者 ctrlend 光标向左切换一个单词:ctrl← 光标向右切换一个单词:ctrl→ 历史命令搜索:history 历史命令匹配第一条执行:!x (x表示历史命令…...
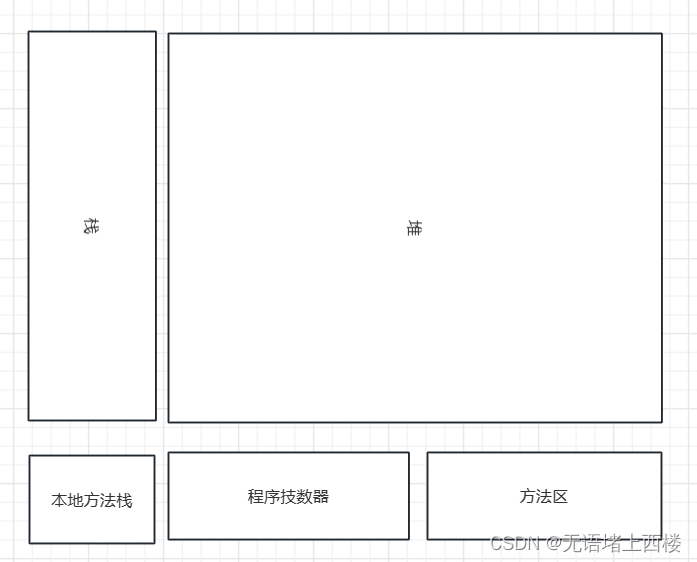
jvm的内存划分区域
jvm划分5个区域: java虚拟机栈、本地方法栈、堆、程序计数器、方法区。 各个区各自的作用: 1.本地方法栈:用于管理本地方法的调用,里面并没有我们写的代码逻辑,其由native修饰,由 C 语言实现。 2.程序计数…...
什么是数据中心IP,优缺点是什么?
如果根据拥有者或者说发送地址来分类的话,可以将代理分为三类:数据中心ip,住宅ip,移动ip 本文我们来了解数据中心ip的原理以及他们的优势劣势,才能选择适合自己的代理。 一、什么是数据中心ip代理? 数据中心ip是由数据中心拥有…...

模块化与组件化:开发中的双剑合璧
引言:模块化与组件化的重要性 在现代软件开发中,随着项目规模的增长和技术的复杂性增加,如何有效地组织和管理代码变得越来越重要。模块化与组件化作为两种主要的代码组织方法,为开发者提供了有效的工具,帮助他们创建…...
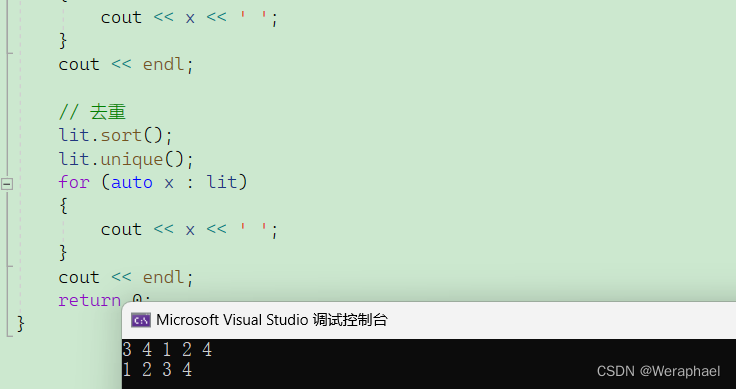
【C++初阶】list的常见使用操作
👦个人主页:Weraphael ✍🏻作者简介:目前学习C和算法 ✈️专栏:C航路 🐋 希望大家多多支持,咱一起进步!😁 如果文章对你有帮助的话 欢迎 评论💬 点赞…...
排序之插入排序
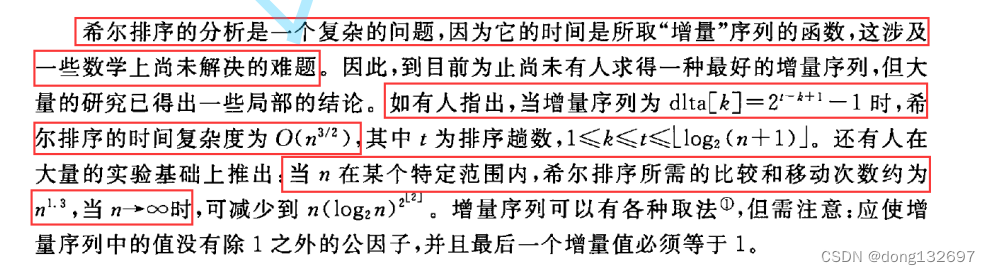
文章目录 前言一、直接插入排序1、基本思想2、直接插入排序的代码实现3、直接插入排序总结 二、希尔排序1、希尔排序基本思想2、希尔排序的代码实现3、希尔排序时间复杂度 前言 排序:所谓排序,就是使一串记录,按照其中的某个或某些关键字的大…...
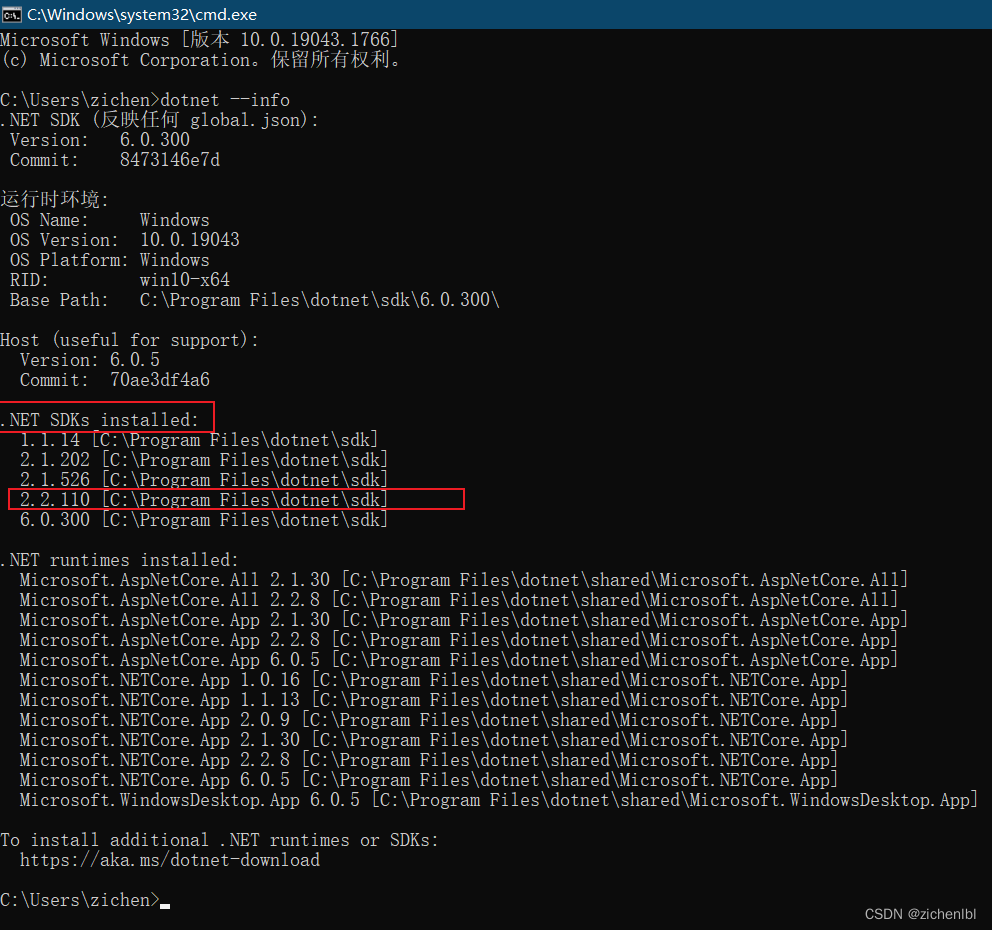
c# - - - 安装.net core sdk
如图,安装的是.Net Core 2.2版本 查看安装成功...
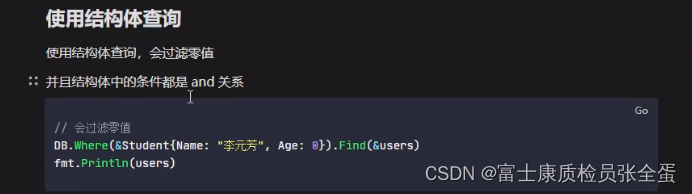
Golang Gorm 高级查询之where + find
插入测试数据 package mainimport ("fmt""gorm.io/driver/mysql""gorm.io/gorm" )type Student struct {ID int64Name string gorm:"size:6"Age intEmail *string }func (*Student) TableName() string {return "student&q…...

【LeetCode】30 天 Pandas 挑战
一、笔记 1.对某列进行筛选 df[(df[column1]条件1) | (df[column2]条件2) & (df[column3]条件3)][[columns]]真题: (一)条件筛选——1.大的国家(一)条件筛选——2.可回收且低脂的产品(一)…...

头歌MYSQL——课后作业2 数据表中数据的插入、修改和删除
第1关:数据表中插入一条记录,对指定字段赋值 任务描述 本关任务:在library数据库的reader数据表中插入一条数据 姓名xm为林团团,电话号码dhhm为13507311234,其余字段取默认值 显示数据表的所有数据 为了完成本关任务,…...

2026年238个好发CCF-A的强化学习idea全面汇总!
最近强化学习领域迎来重磅进展!强化学习之父R.S.Sutton 提出了一种全新的范式:Intentional Updates机制!其不再盲目预设步长,而是先设定一个预期的输出改变目标,实现了内存消耗降低10-100倍的同时,性能依然…...

嵌入式PID温度控制:从算法原理到C语言工程实现
1. 项目概述与核心思路最近在做一个智能热水器的嵌入式控制项目,核心任务就是让水温能又快又稳地达到我们设定的目标值。这听起来简单,但实际做起来,水温系统有惯性、有延迟,加热功率和环境散热也在实时变化,想实现精准…...

谷歌开发者大会2026:Gemini全面升级,重塑搜索与生活体验!
谷歌开发者大会2026开幕在品尝过「会前甜点」Android Show 之后,真正的重头戏谷歌开发者大会 Google I/O 2026 正式揭开了帷幕。不出所料,在时长接近两个小时的活动中,Gemini 占据了绝对的 C 位。除了更新基础模型和周边能力之外,…...

Perplexity文化新闻搜索响应延迟超2.3秒?工程师级诊断流程:从LLM推理缓存污染到文化实体消歧失败链路追踪
更多请点击: https://codechina.net 第一章:Perplexity文化新闻搜索响应延迟超2.3秒?工程师级诊断流程:从LLM推理缓存污染到文化实体消歧失败链路追踪 当Perplexity平台在处理“2024东京国际电影节获奖名单”或“巴西狂欢节历史溯…...
)
外部系统调用SAP数据?用ABAP RFC函数搭个“桥梁”其实很简单(含Function Group创建避坑)
跨系统数据整合:ABAP RFC函数的设计哲学与实战指南 当企业数字化转型进入深水区,业务系统间的数据孤岛问题日益凸显。某零售企业的供应链总监最近就面临这样的挑战:"我们的电商平台需要实时获取SAP中的库存数据,但每次手工导…...

终极Matlab深度学习工具箱:DeepLearnToolbox完整指南
终极Matlab深度学习工具箱:DeepLearnToolbox完整指南 【免费下载链接】DeepLearnToolbox Matlab/Octave toolbox for deep learning. Includes Deep Belief Nets, Stacked Autoencoders, Convolutional Neural Nets, Convolutional Autoencoders and vanilla Neural…...

WSL2网络抽风?能ping通宿主机但上不了网?试试这个一劳永逸的DNS修复脚本
WSL2网络故障终极解决方案:自动化DNS修复脚本实战指南 你是否遇到过这样的场景:在WSL2中能够ping通宿主机,却无法访问任何外网资源?每次重启后手动修改的/etc/resolv.conf配置总是被神秘重置?这种恼人的网络问题已经成…...

语法错误秒级定位,Perplexity查询调试实战手册,一线SRE团队内部流出!
更多请点击: https://intelliparadigm.com 第一章:Perplexity语法查询功能概览 Perplexity 是一款面向开发者与数据分析师设计的轻量级语法感知型查询工具,其核心能力在于对结构化与半结构化文本(如 SQL、JSON Schema、YAML 配置…...

OmenSuperHub终极指南:3步解锁暗影精灵完整性能潜力
OmenSuperHub终极指南:3步解锁暗影精灵完整性能潜力 【免费下载链接】OmenSuperHub 使用 WMI BIOS控制性能和风扇速度,自动解除DB功耗限制。 项目地址: https://gitcode.com/gh_mirrors/om/OmenSuperHub 想要彻底掌控惠普暗影精灵笔记本的性能吗&…...

2026企业招聘平台选择趋势:前程无忧成为多类型岗位招聘的重要平台
相比只聚焦某一类岗位或单一人群的招聘平台,前程无忧更像一个覆盖企业全生命周期招聘需求的“综合人才生态平台”。从基层岗位招聘,到中高端人才寻访;从校园招聘,到灵活用工与AI智能匹配,前程无忧正在凭借28年行业积累…...