【2D/3D RRT* 算法】使用快速探索随机树进行最佳路径规划(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥
🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
📋📋📋本文目录如下:🎁🎁🎁
目录
💥1 概述
📚2 运行结果
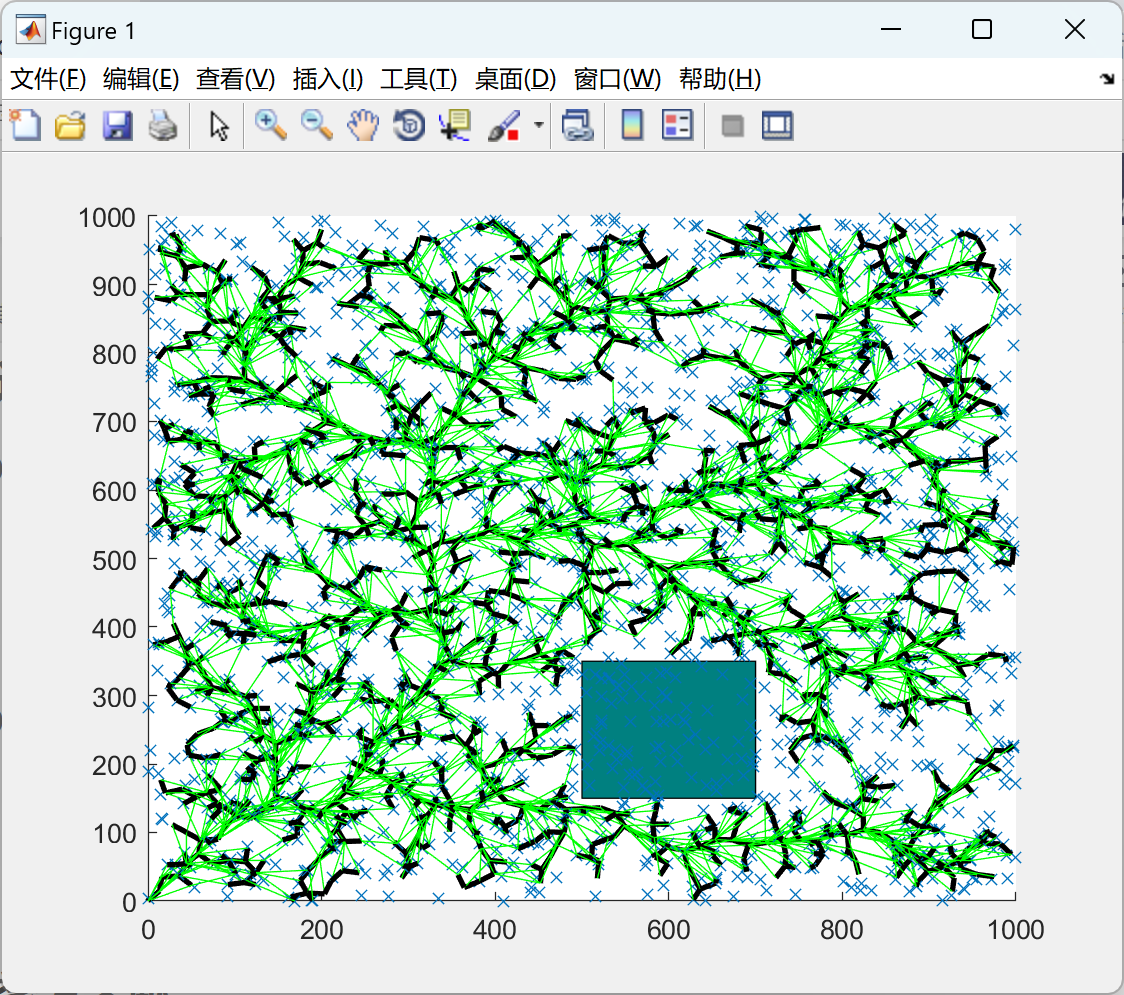
2.1 2D
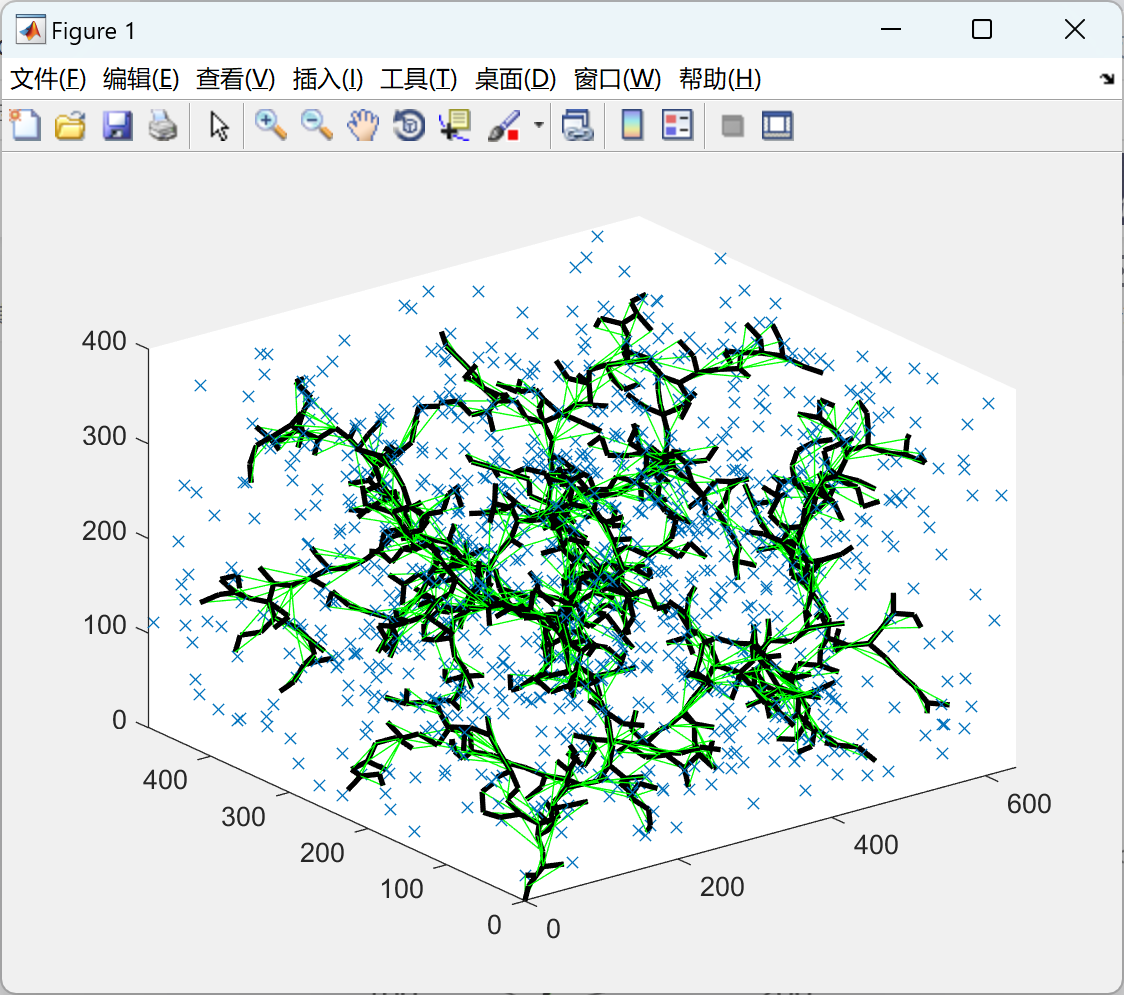
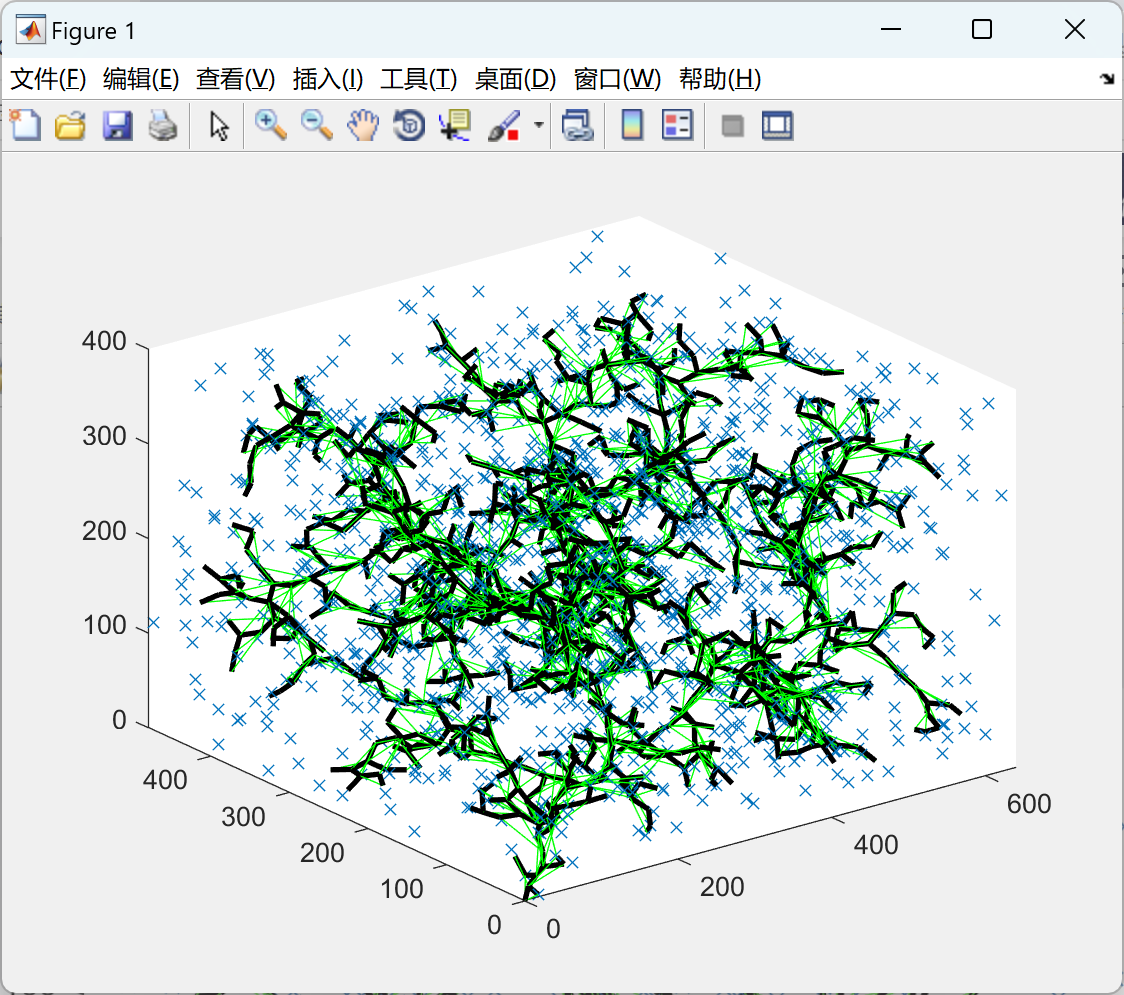
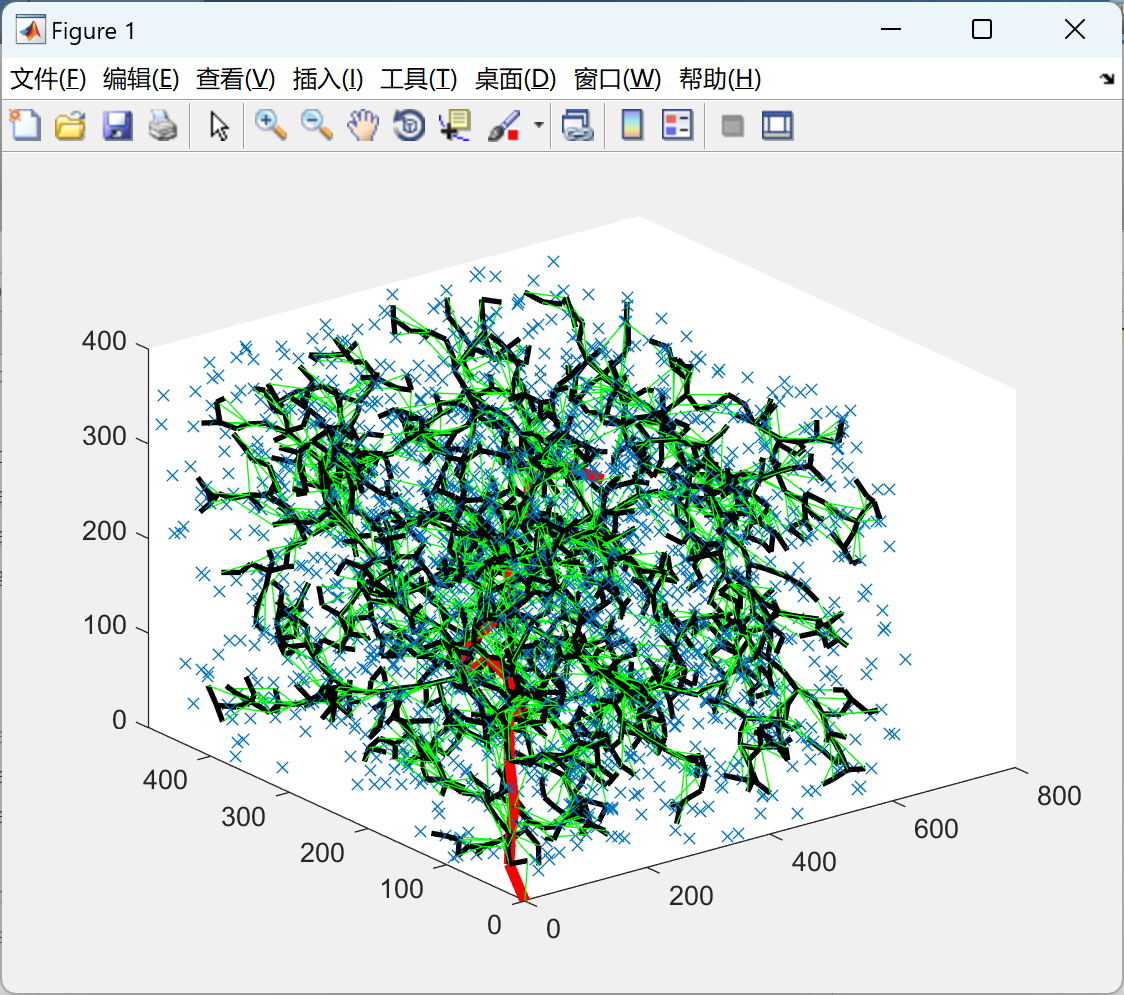
2.2 3D
🎉3 参考文献
🌈4 Matlab代码实现

💥1 概述
2D/3D RRT*算法是一种基于快速探索随机树的最佳路径规划算法。它是RRT*算法的扩展版本,能够在二维或三维环境中寻找最优路径。
该算法的核心思想是通过随机采样的方式构建一颗探索树,其中树的节点表示机器人的位置,边表示机器人从一个位置移动到另一个位置的路径。探索树的生长过程中,会不断进行路径优化,以找到最佳路径。
具体实现过程中,算法首先生成一个起始节点,并随机采样其他节点。然后,对于每个采样的节点,算法会在树中查找最近邻节点,并以此节点为起点,通过插值和优化等方式生成一条新的路径。新路径的代价(如路径长度或代价函数)将与之前的路径进行比较,选择代价更小的路径,将新节点插入树中。
该算法的最终目标是在有限的探索时间内找到从起始位置到目标位置的最优路径。通过不断优化路径,RRT*算法能够找到接近最短路径的解,同时具有较低的计算复杂度。
在二维或三维的路径规划问题中,2D/3D RRT*算法具有广泛的应用。例如,它可以用于地图导航、机器人路径规划、无人机航迹规划等场景。通过灵活调整采样策略、路径优化策略等参数,该算法能够适应各种复杂的环境和约束条件。
总之,2D/3D RRT*算法利用快速探索随机树的方式,在二维或三维环境中进行最佳路径规划,具有较高的搜索效率和路径质量,为机器人和自主系统的路径规划问题提供了有效的解决方案。
📚2 运行结果
2.1 2D


2.2 3D

部分代码:
for i = 1:1:numNodes
q_rand = [floor(rand(1)*x_max) floor(rand(1)*y_max)];
plot(q_rand(1), q_rand(2), 'x', 'Color', [0 0.4470 0.7410])
% Break if goal node is already reached
for j = 1:1:length(nodes)
if nodes(j).coord == q_goal.coord
break
end
end
% Pick the closest node from existing list to branch out from
ndist = [];
for j = 1:1:length(nodes)
n = nodes(j);
tmp = dist(n.coord, q_rand);
ndist = [ndist tmp];
end
[val, idx] = min(ndist);
q_near = nodes(idx);
q_new.coord = steer(q_rand, q_near.coord, val, EPS);
if noCollision(q_rand, q_near.coord, obstacle)
line([q_near.coord(1), q_new.coord(1)], [q_near.coord(2), q_new.coord(2)], 'Color', 'k', 'LineWidth', 2);
drawnow
hold on
q_new.cost = dist(q_new.coord, q_near.coord) + q_near.cost;
% Within a radius of r, find all existing nodes
q_nearest = [];
r = 60;
neighbor_count = 1;
for j = 1:1:length(nodes)
if noCollision(nodes(j).coord, q_new.coord, obstacle) && dist(nodes(j).coord, q_new.coord) <= r
q_nearest(neighbor_count).coord = nodes(j).coord;
q_nearest(neighbor_count).cost = nodes(j).cost;
neighbor_count = neighbor_count+1;
end
end
% Initialize cost to currently known value
q_min = q_near;
C_min = q_new.cost;
% Iterate through all nearest neighbors to find alternate lower
% cost paths
for k = 1:1:length(q_nearest)
if noCollision(q_nearest(k).coord, q_new.coord, obstacle) && q_nearest(k).cost + dist(q_nearest(k).coord, q_new.coord) < C_min
q_min = q_nearest(k);
C_min = q_nearest(k).cost + dist(q_nearest(k).coord, q_new.coord);
line([q_min.coord(1), q_new.coord(1)], [q_min.coord(2), q_new.coord(2)], 'Color', 'g');
hold on
end
end
% Update parent to least cost-from node
for j = 1:1:length(nodes)
if nodes(j).coord == q_min.coord
q_new.parent = j;
end
end
% Append to nodes
nodes = [nodes q_new];
end
end
D = [];
for j = 1:1:length(nodes)
tmpdist = dist(nodes(j).coord, q_goal.coord);
D = [D tmpdist];
end
🎉3 参考文献
文章中一些内容引自网络,会注明出处或引用为参考文献,难免有未尽之处,如有不妥,请随时联系删除。
[1] LaValle, S. M., ‘Rapidly-Exploring Random Trees: A New Tool for Path Planning’, TR 98-11, Computer Science Department, Iowa State University, Oct. 1998.
[2] Karaman, Sertac, and Emilio Frazzoli. "Incremental sampling-based algorithms for optimal motion planning." Robotics Science and Systems VI 104 (2010).
[3]莫栋成,刘国栋.改进的快速探索随机树双足机器人路径规划算法[J].计算机应用, 2013, 33(01):199-201.DOI:10.3724/SP.J.1087.2013.00199.
🌈4 Matlab代码实现
相关文章:
【2D/3D RRT* 算法】使用快速探索随机树进行最佳路径规划(Matlab代码实现)
💥💥💞💞欢迎来到本博客❤️❤️💥💥 🏆博主优势:🌞🌞🌞博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。 ⛳️座右铭&a…...

用反射实现自定义Java对象转化为json工具类
传入一个object类型的对象获取该对象的class类getFields方法获取该类的所有属性对属性进行遍历,并且拼接成Json格式的字符串,注意:通过属性名来推断方法名获取Method实例通过invoke方法调用 public static String objectToJsonUtil(Object o…...

rk3568 nvme硬盘分区,格式化,挂载测试
前言 环境介绍: 1.编译环境 Ubuntu 18.04.5 LTS 2.SDK rk356x_linux 3.单板 迅为itop-3568开发板 自制底板 一、查看硬盘 插上硬盘上电,进入系统后通过命令lspci查看nvme硬盘识别情况 [rootRK356X:/]# lspci -k 21:00.0 Class 0108: 1e4b:1202…...
Failed to load ApplicationContext解决办法,spring版本问题
有如下报错: "D:\Program Files\Java\jdk-13.0.1\bin\java.exe" -agentlib:jdwptransportdt_socket,address127.0.0.1:7325,suspendy,servern -ea -Didea.test.cyclic.buffer.size1048576 -Dfile.encodingUTF-8 -classpath "D:\Program Files\JetBr…...
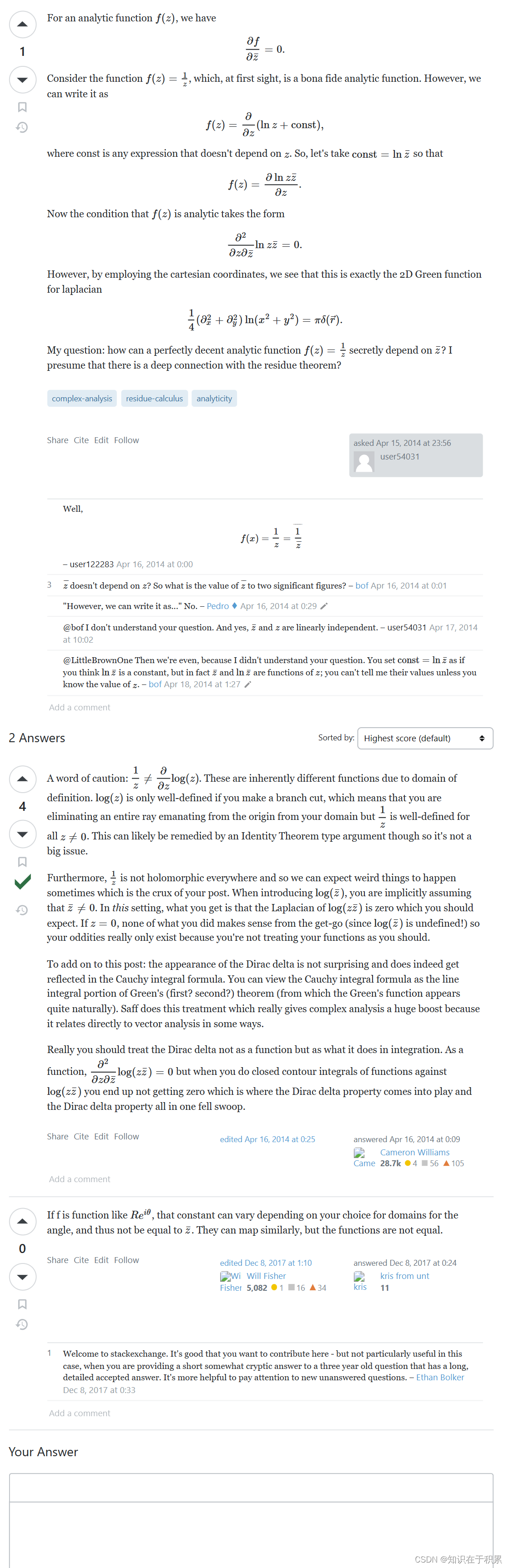
Is f(z)=1/z truly an analytic function
https://math.stackexchange.com/questions/755566/is-fz-1-z-truly-an-analytic-function...
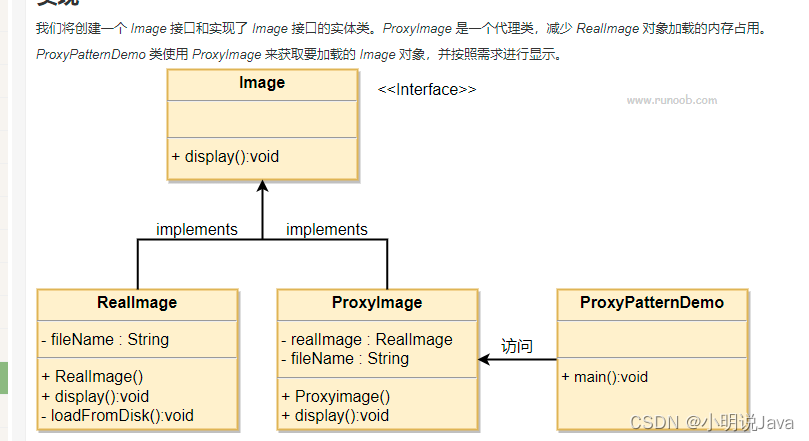
代理模式 静态代理和动态代理(jdk、cglib)——Java入职第十一天
一、代理模式 一个类代表另一个类去完成扩展功能,在主体类的基础上,新增一个代理类,扩展主体类功能,不影响主体,完成额外功能。比如买车票,可以去代理点买,不用去火车站,主要包括静态代理和动态代理两种模式。 代理类中包含了主体类 二、静态代理 无法根据业务扩展,…...

Remmina在ubuntu22.04中无法连接Windows
Remmina在ubuntu22.04中无法连接Windows 问题 提示为: 无法通过TLS到RDP服务器… 分析 原因是Remmina需要使用openssl通过RDP加密与Windows计算机连接,而ubuntu22.04系统中OpenSSL版本为3.0,Openssl3 将 tls<1.2 和 sha1 的默认安全级别…...

【uniapp】this有时为啥打印的是undefined?(箭头函数修改this)
😉博主:初映CY的前说(前端领域) ,📒本文核心:uniapp中this指向问题 前言:this大家知道是我们当前项目的实例,我们可以在这个this上面拿到我们原型上的全部数据。这个常用在我们在方法中调用其他方法使用。 …...

2023高教社杯数学建模思路 - 复盘:光照强度计算的优化模型
文章目录 0 赛题思路1 问题要求2 假设约定3 符号约定4 建立模型5 模型求解6 实现代码 建模资料 0 赛题思路 (赛题出来以后第一时间在CSDN分享) https://blog.csdn.net/dc_sinor?typeblog 1 问题要求 现在已知一个教室长为15米,宽为12米&…...

河道漂浮物检测:安防监控/视频智能分析/AI算法智能分析技术如何助力河道整治工作?
随着社会的发展和人们生活水平的进步,水污染问题也越来越严重,水资源监管和治理成为城市发展的一大困扰,水面上的漂浮垃圾不仅会影响河道生态安全并阻碍船舶航行,还会影响人们的身体健康。 TSINGSEEE青犀AI智能分析平台在环保场景…...
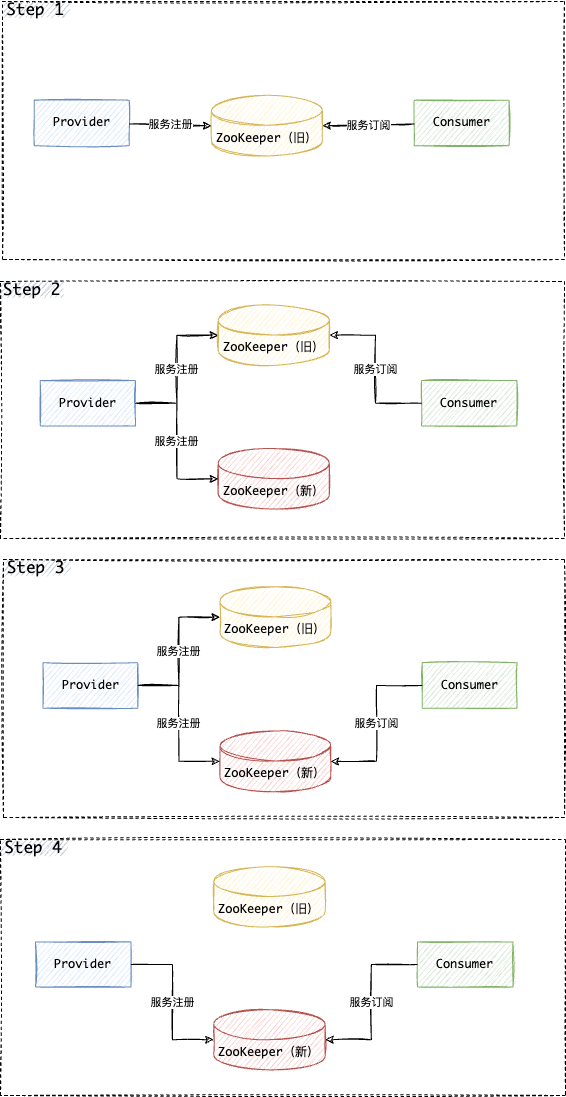
Dubbo 应用切换 ZooKeeper 注册中心实例,流量无损迁移
首先思考一个问题:如果 Dubbo 应用使用 ZooKeeper 作为注册中心,现在需要切换到新的 ZooKeeper 实例,如何做到流量无损? 本文提供解决这个问题的一种方案。 场景 有两个基于 Dubbo 的微服务应用,一个是服务提供者&…...

ADB入门教程
安卓开发 文章目录 安卓开发前言USB 连接链接 前言 基本用法 命令语法 adb 命令的基本语法如下: adb [-d|-e|-s <serialNumber>] <command>如果只有一个设备/模拟器连接时,可以省略掉 [-d|-e|-s ] 这一部分,直接使用 adb 。 为…...
SQLPro Studio for Mac:强大的SQL开发和管理工具
SQLPro Studio for Mac是一款强大的Mac上使用的SQL开发和管理工具,它支持各种数据库,包括MySQL,PostgreSQL,SQLite等。使用 SQLPro Studio,您可以轻松地连接和管理您的数据库,执行SQL查询和脚本,…...
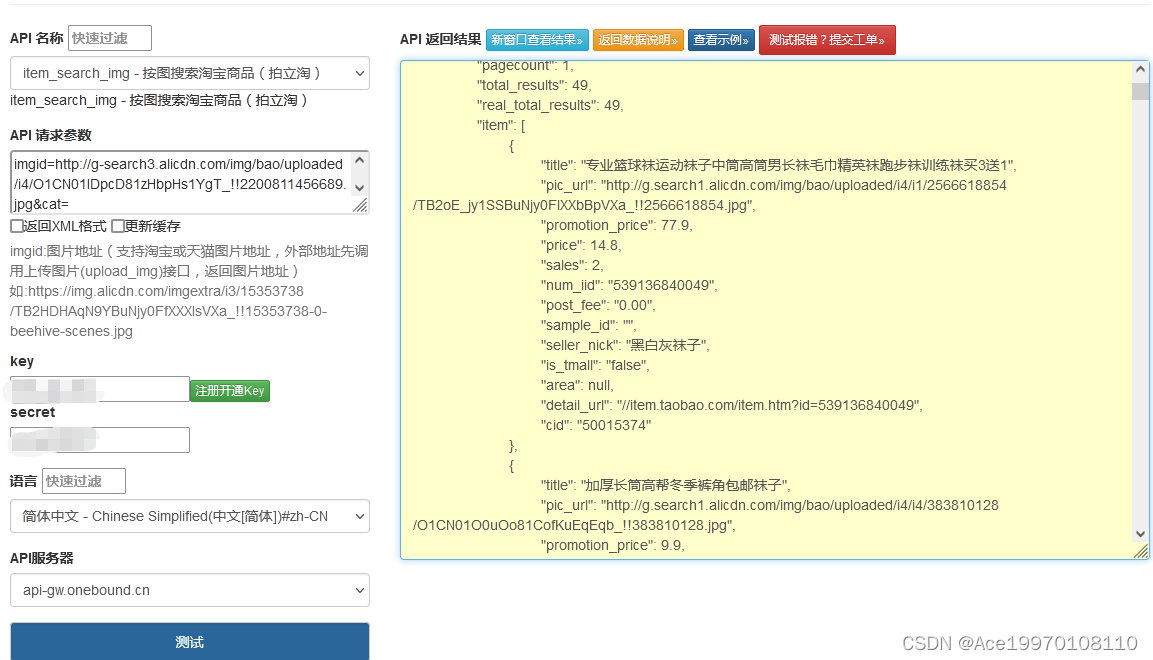
淘宝API技术解析,实现按图搜索淘宝商品
淘宝提供了开放平台接口(API)来实现按图搜索淘宝商品的功能。您可以通过以下步骤来实现: 1. 获取开放平台的访问权限:首先,您需要在淘宝开放平台创建一个应用,获取访问淘宝API的权限。具体的申请步骤和要求…...

错误:依赖检测失败: mysql-community-libs(x86-64) >= 5.7.9 被 (已安裝) mysql-community-li
错误: 错误原因:没有删除之前安装的依赖问题 解决办法: yum remove mysql-libs 再用下面指令检查一遍: rpm -qa | grep mysql 如果有还未清理的,用下面指令: rpm -e xxx...
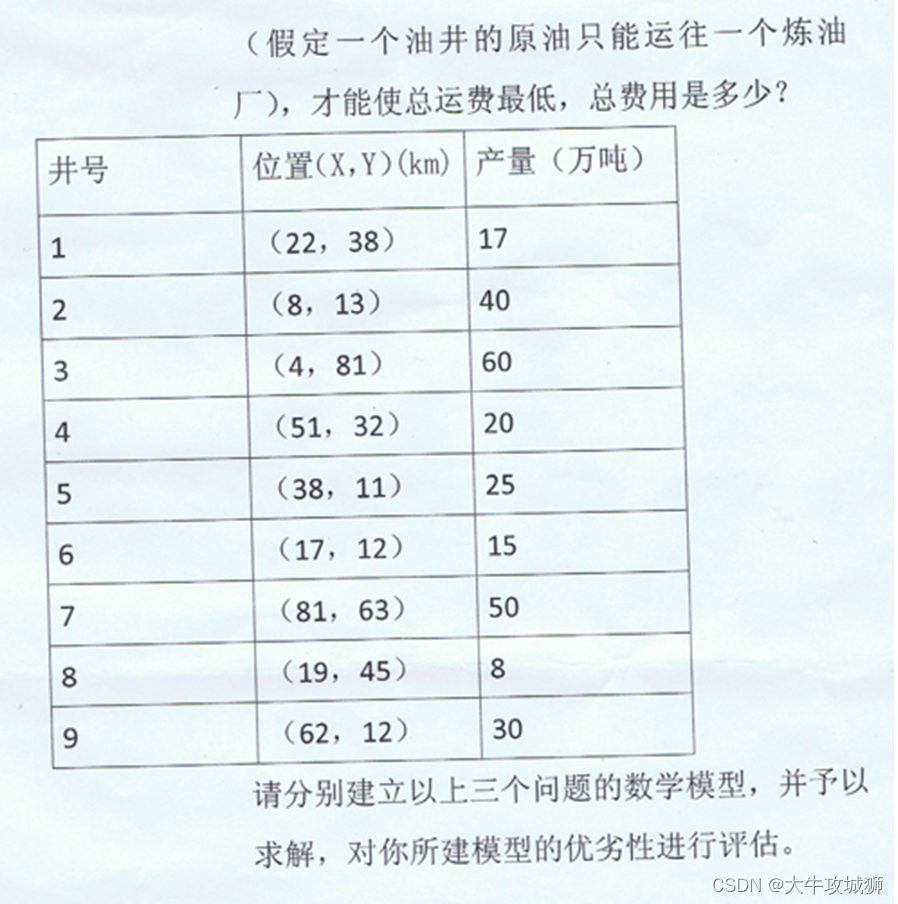
使用MATLAB解算炼油厂的选址
背景 记得有一年的数据建模大赛,试题是炼油厂的选址,最后我们采用MATLAB编写(复制)蒙特卡洛算法,还到了省级一等奖,这里把仅有一些记忆和材料,放到这里来,用来纪念消失的青春。 本…...

AudioTrack播放音乐之getMinBufferSize
1. AudioTrack播放音乐之前需要做好准备,即需要先计算最小音频数据缓存空间 文件路径:AudioTrack.java (frameworks\base\media\java\android\media) static public int getMinBufferSize(int sampleRateInHz, int channelConfig, int audioFormat) {@参数sampleRateInHz,…...

React和Redux中的不变性
https://overreacted.io/zh-hans/a-complete-guide-to-useeffect/ 一、不变性和副作用 1.不变:不断创造新值来替换旧值 2.不变性规则: (1)当给定相同的输入时,纯函数必须始终返回相同的值 (2࿰…...
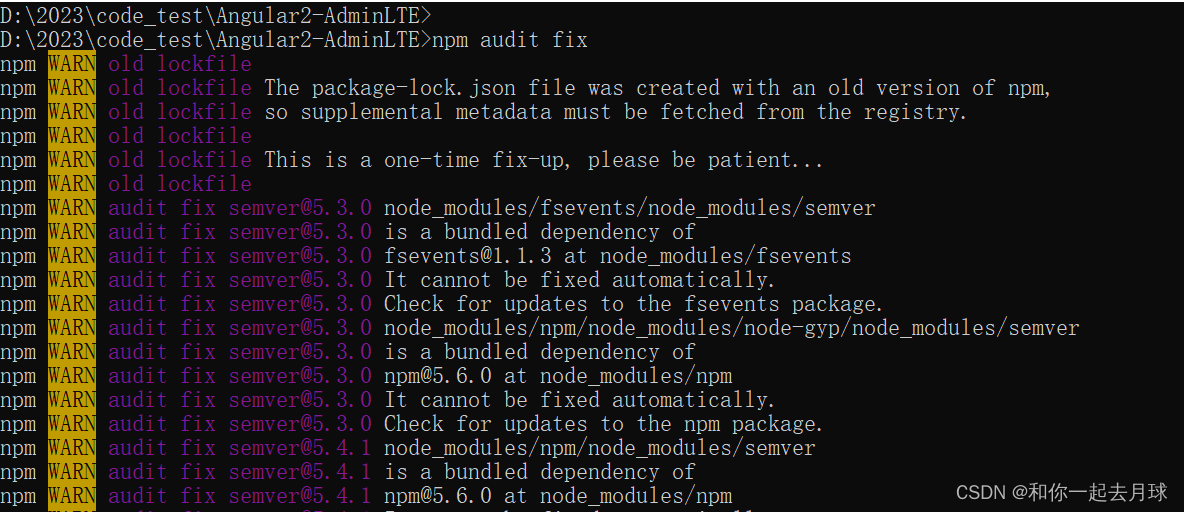
NPM 常用命令(一)
目录 1、npm 1.1 简介 1.2 依赖性 1.3 安装方式 2、npm access 2.1 命令描述 2.2 详情 3、npm adduser 3.1 描述 4、npm audit 4.1 简介 4.2 审计签名 4.3 操作示例 4.4 配置 audit-level dry-run force json package-lock-only omit foreground-scripts …...

【ES6】Promise推荐用法
一般来说,不要在then()方法里面定义 Reject 状态的回调函数(即then的第二个参数),总是使用catch方法。 // bad promise.then(function(data) {// success}, function(err) {// error});// good promise.then(function(data) { //…...

GraphRAG生态全景:6大主流方案盘点
在大模型应用加速落地的过程中,RAG已经成为企业构建智能知识库、智能问答系统和行业大模型应用的重要技术路线。但随着场景从简单文档问答进入复杂业务推理,传统RAG的能力边界正在逐渐显现。尤其是在公安、海关、保险、电力、军事等行业中,企…...

LEFT JOIN 中 ON 与 WHERE 过滤的差异
在 MySQL 数据库开发中,LEFT JOIN(左外连接)是一个最常被误用的语法。许多开发者往往习惯性地将所有过滤条件一股脑地往 ON 后面塞,或者为了排版好看将条件全部扔到 WREHRE 里面。 这种模糊的逻辑在普通内连接(INNER J…...

一幅精细绝伦的[城市或地点]微缩模型
提示词: 一幅精细绝伦的[城市或地点]微缩模型,无缝搭建于质朴的木桌之上,仿佛整个场景都是实时手工制作而成。场景囊括了[城市或地点]最具标志性的地标、建筑、街道、交通、文化元素和氛围,周围环绕着密 地址:https://…...

FinalBurn Neo:一场跨越时空的街机游戏考古之旅
FinalBurn Neo:一场跨越时空的街机游戏考古之旅 【免费下载链接】FBNeo FinalBurn Neo - We are Team FBNeo. 项目地址: https://gitcode.com/gh_mirrors/fb/FBNeo 在数字时代的洪流中,有一群守护者正在用代码为经典街机游戏搭建永生的方舟。Fina…...

别只懂SARA归档删除!SAP数据生命周期管理实战:归档、查询与长期保留指南
SAP数据生命周期管理实战:从归档策略到长期可查询架构 在数字化转型浪潮中,企业数据量呈现指数级增长。某跨国制造企业的SAP系统仅物料凭证表每年就新增超过200万条记录,导致月结操作耗时从2小时延长至8小时。这不仅是存储空间的问题——系统…...

Ollama访问限制
发布于: Ollama访问限制 | Eucalyptushttps://blog.mingliangstar.com/2026/05/21/Ollama%E8%AE%BF%E9%97%AE%E9%99%90%E5%88%B6/ NginxBasic Auth认证 生成密码文件 # 安装工具 yum install httpd-tools -y# 创建密码文件(用户名 admin)…...

FastAdmin旧版本CVE-2024-7928任意文件读取漏洞实战修复指南
1. 这个漏洞不是“能读任意文件”那么简单,而是整个权限体系的崩塌起点FastAdmin 是国内 PHP 后台开发领域使用率极高的开源框架,尤其在中小型企业定制化管理后台、政企内部系统、电商中台等场景中,大量项目仍基于 v1.3.x ~ v1.4.5 版本运行。…...
)
从CRUD到AI大神:小白程序员5个月逆袭之路(收藏版)
本文分享了作者从传统CRUD工程师转型为AI应用工程师的心路历程。通过实战先行、深入学习、项目巩固三个阶段,作者逐步掌握了AI模型开发、部署和服务化能力,并成功开发了多个AI应用项目。文章强调实践导向的学习方法,建议程序员利用AI工具提升…...

抖音无水印下载器:高效保存高清视频与图集的完整解决方案
抖音无水印下载器:高效保存高清视频与图集的完整解决方案 【免费下载链接】douyin-downloader A practical Douyin downloader for both single-item and profile batch downloads, with progress display, retries, SQLite deduplication, and browser fallback su…...

0 基础跨行斩获月薪 10k 实力远不及破局魄力
人生如同奔涌的比特流,暗礁与漩涡总在不经意间出现。 当挑战如恶意攻击般袭来,切莫因一时受阻而缴械投降。 那些在代码与协议中鏖战的日夜终将铸就铠甲,正如防火墙抵御入侵守护核心,只要目标坚定持续精进,终将在攻防…...