基于MSP430 红外避障-遥控小车(电赛必备 附项目代码)
文章目录
- 一、硬件清单
- 二、模块连接
- 三、程序设计
- 四、项目源码
项目环境:
- 1. MSP430F5529
- 2. Code Composer Studio
- 3. 蓝牙调试助手
项目简介:
小车可分为3种工作模式,每种工作模式都会打印在OLED显示屏上,通过按键转换工作模式。
模式1: 小车红外循迹,通过超声波实时监测障碍物距离,若超出规定路线,距离障碍物相对较近时,原地停止,等待指令。
模式2: 自主驾驶,通过超声扫描各障碍物距离,当小于一定距离时原地左转。
模式3: 蓝牙远程遥控
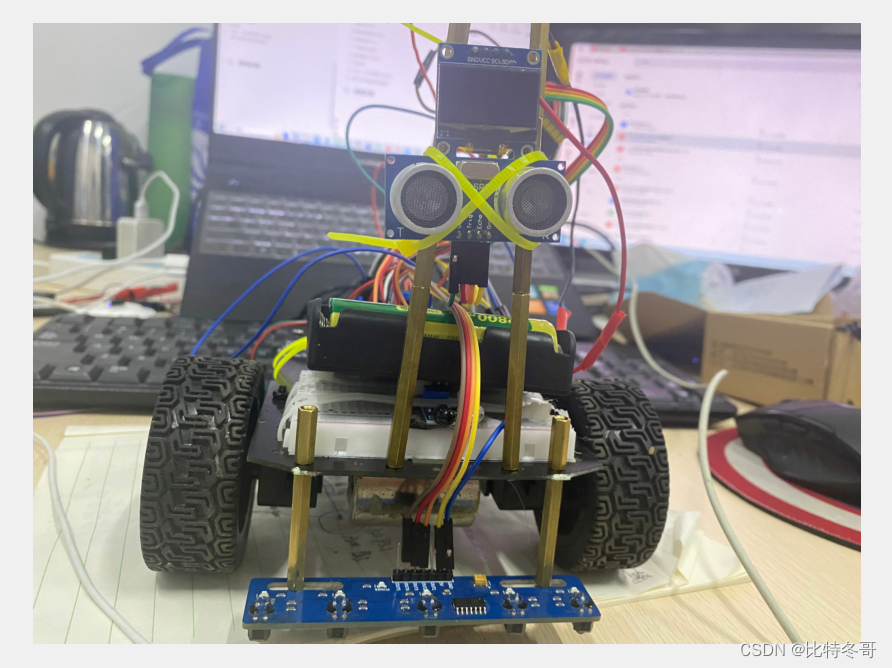
一、硬件清单
本项目用到的模块有:
- MSP430F5529开发板
- 红外循迹模块 TCRT5000L
- 超声波 HC-SR04
- 蓝牙 ATK_HC-05
- 显示屏 四针OLED
- 充电电池 12V
- TT电机及车轮
- 电机驱动 L298N
- 万向轮
- VCC、GND拓展口(自焊)
- 若干杜邦线及铜柱螺母
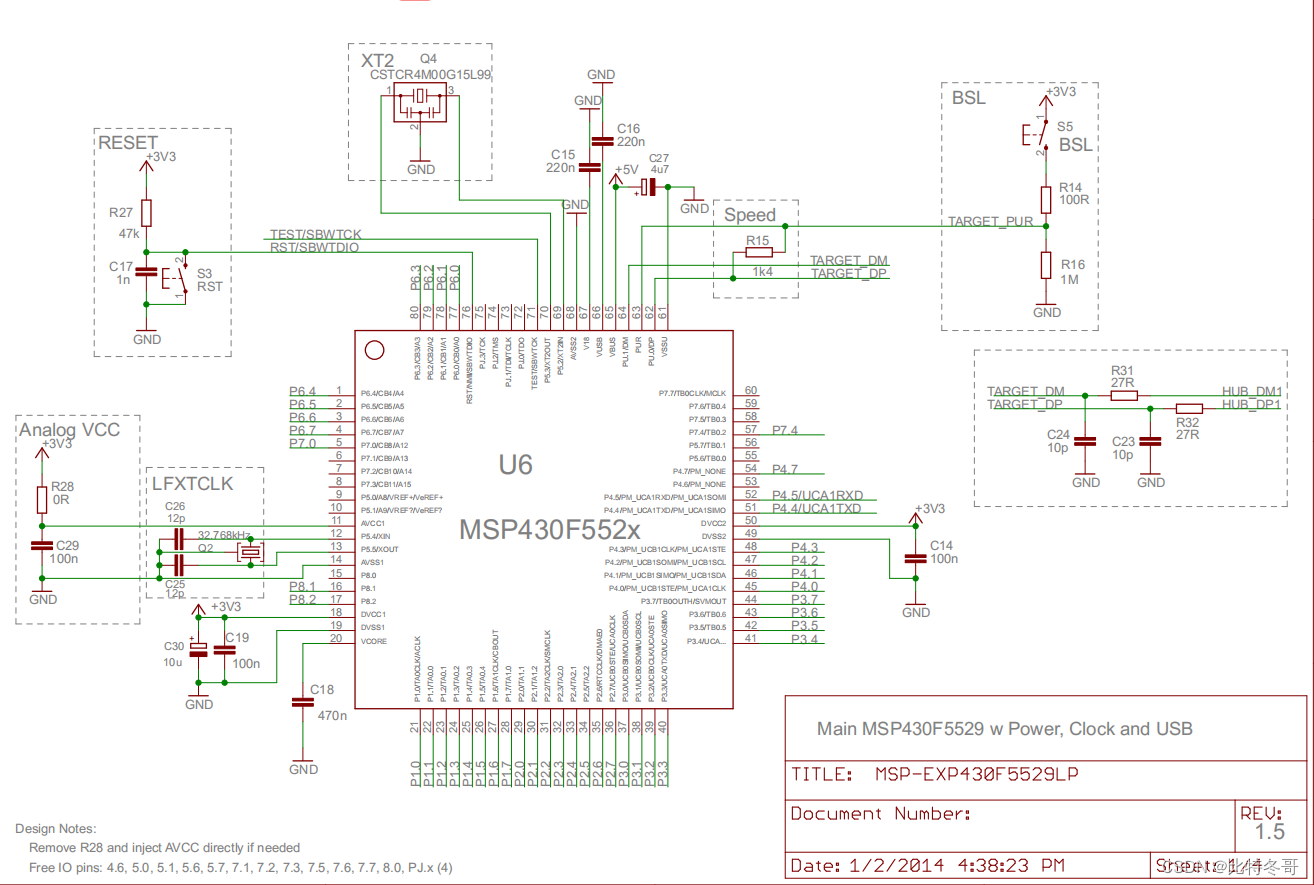
二、模块连接
手册先行
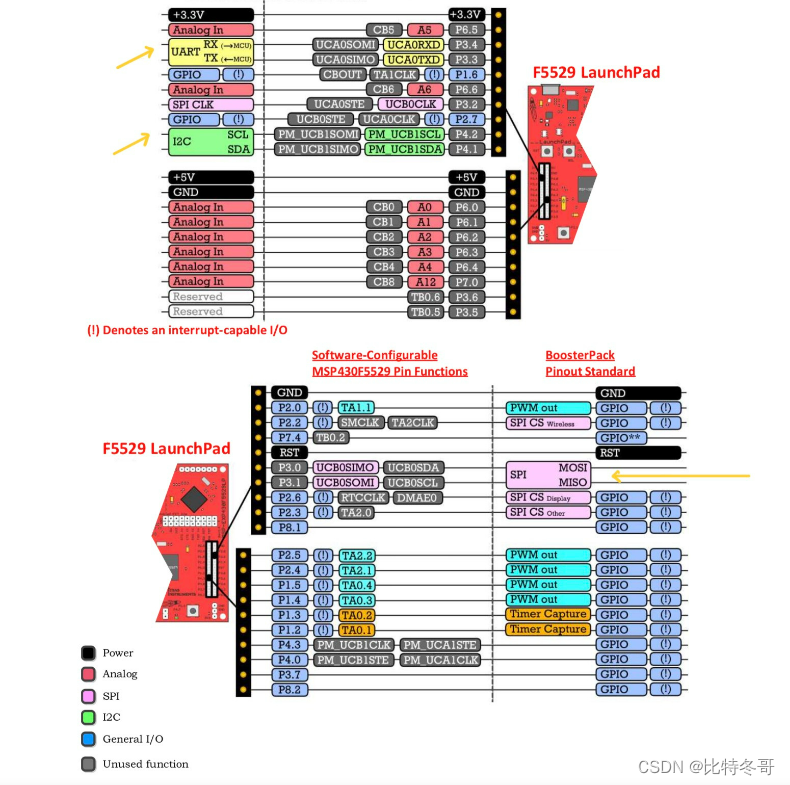
1. 蓝牙: UART
UART(A0): P3.4、P3.3(RX和TX)
UART(A1): P4.5、P4.4(RX和TX)
2. OLED : IIC
IIC(B0): P3.0、P3.1(SCL和SDA)
IIC(B1): P4.2、P4.1(SCL和SDA)
3. 超声波: TIMER
TA0:P1.1、P1.2、P1.3、P1.4、P1.5
TA1:P1.7、P2.0、P2.1
TA2:P2.3、P2.4、P2.5
TB0:P3.6、P5.6、P5.7、P7.4、P7.5、P7.6、P7.7
以上为该项目需要部分引脚分配,以下为我的模块连接示例:
- Motor:
P3.5、P3.6P3.0、P3.1 - PWM:
P2.4、P2.5 - TCRT5000L:
P3.4、P6.6、P1.6 - OLED:
P2.0(SCL)、P2.2(SDA) - HC_SR-04:
P1.2(echo)、P1.4(Trig) - ATK_HC-05:
P4.4(TX)、P4.5(RX)
三、程序设计
1. motor_And_infrared_GPIOInit
P3SEL &= ~BIT0; //右轮
P3DIR |= BIT0;
P3SEL &= ~BIT1;
P3DIR |= BIT1;P3SEL &= ~BIT5; //左轮
P3DIR |= BIT5;
P3SEL &= ~BIT6;
P3DIR |= BIT6;P3SEL &=~BIT4;
P3DIR &=~BIT4;
P3REN |=BIT4;//左边P1SEL &=~BIT6;
P1DIR &=~BIT6;
P1REN |=BIT6;//右边P6SEL &=~BIT6;
P6DIR &=~BIT6;
P6REN |=BIT6;//中间
2. SetPwm_Init
P2DIR |= BIT4; //配置P2.4复用为定时器TA2.4
P2SEL |= BIT4; //配置P2.4为输出
TA2CTL = TASSEL_2+MC_1+ID_3;
TA2CCTL1 = OUTMOD_7 ;
TA2CCR1 = arr;
TA2CCR0 = psc;P2DIR |= BIT5; //配置P2.5复用为定时器TA2.5
P2SEL |= BIT5; //配置P2.5为输出
TA2CTL = TASSEL_2+MC_1+ID_3;
TA2CCTL2 = OUTMOD_7 ;
TA2CCR2 = arr;
TA2CCR0 = psc;
3. OLED_Init
//OLED初始化函数
void OLED_Init(void)
{P2DIR |= BIT0; //设置引脚为输出模式P2DIR |= BIT2;P2OUT |=BIT0; //设置为高电平P2OUT |=BIT2;IIC_SDA_IN0;delay_ms(200);IIC_SDA_IN1;
//OLED_WR_Byte(0xAE,OLED_CMD);//--turn off oled panelOLED_WR_Byte(0x00,OLED_CMD);//---set low column addressOLED_WR_Byte(0x10,OLED_CMD);//---set high column addressOLED_WR_Byte(0x40,OLED_CMD);//--set start line address Set Mapping RAM Display Start Line (0x00~0x3F)OLED_WR_Byte(0x81,OLED_CMD);//--set contrast control registerOLED_WR_Byte(0xCF,OLED_CMD);// Set SEG Output Current BrightnessOLED_WR_Byte(0xA1,OLED_CMD);//--Set SEG/Column Mapping 0xa0脳贸脫脪路麓脰脙 0xa1脮媒鲁拢OLED_WR_Byte(0xC8,OLED_CMD);//Set COM/Row Scan Direction 0xc0脡脧脧脗路麓脰脙 0xc8脮媒鲁拢OLED_WR_Byte(0xA6,OLED_CMD);//--set normal displayOLED_WR_Byte(0xA8,OLED_CMD);//--set multiplex ratio(1 to 64)OLED_WR_Byte(0x3f,OLED_CMD);//--1/64 dutyOLED_WR_Byte(0xD3,OLED_CMD);//-set display offset Shift Mapping RAM Counter (0x00~0x3F)OLED_WR_Byte(0x00,OLED_CMD);//-not offsetOLED_WR_Byte(0xd5,OLED_CMD);//--set display clock divide ratio/oscillator frequencyOLED_WR_Byte(0x80,OLED_CMD);//--set divide ratio, Set Clock as 100 Frames/SecOLED_WR_Byte(0xD9,OLED_CMD);//--set pre-charge periodOLED_WR_Byte(0xF1,OLED_CMD);//Set Pre-Charge as 15 Clocks & Discharge as 1 ClockOLED_WR_Byte(0xDA,OLED_CMD);//--set com pins hardware configurationOLED_WR_Byte(0x12,OLED_CMD);OLED_WR_Byte(0xDB,OLED_CMD);//--set vcomhOLED_WR_Byte(0x40,OLED_CMD);//Set VCOM Deselect LevelOLED_WR_Byte(0x20,OLED_CMD);//-Set Page Addressing Mode (0x00/0x01/0x02)OLED_WR_Byte(0x02,OLED_CMD);//OLED_WR_Byte(0x8D,OLED_CMD);//--set Charge Pump enable/disableOLED_WR_Byte(0x14,OLED_CMD);//--set(0x10) disableOLED_WR_Byte(0xA4,OLED_CMD);// Disable Entire Display On (0xa4/0xa5)OLED_WR_Byte(0xA6,OLED_CMD);// Disable Inverse Display On (0xa6/a7)OLED_Clear();OLED_WR_Byte(0xAF,OLED_CMD);}4. BlueTooth_Init
P4SEL |=BIT4+BIT5 ; // P4.5 P4.4 = USCI_A1 TXD/RXD
UCA1CTL1 |= UCSWRST; // **Put state machine in reset**
UCA1CTL1 |= UCSSEL_2; // SMCLK
UCA1BR0 = 9; // 1MHz 115200 (see User's Guide)
UCA1BR1 = 0; // 1MHz 115200
UCA1MCTL |= UCBRS_1 + UCBRF_0; // Modulation UCBRSx=1, UCBRFx=0
UCA1CTL1 &= ~UCSWRST; // **Initialize USCI state machine**
UCA1IE |= UCRXIE; // Enable USCI_A1 RX interrupt
__bis_SR_register(LPM0_bits + GIE); // Enter LPM0, interrupts enabled
5. TIMER_Init
TA0CCTL0 = CCIE; //CCR0中断使能
TA0CCR0 = a*1000; //设定计数值
TA0CTL =TASSEL_2+MC_1+TACLR;//SMCLK,增计数模式,清除TAR
_bis_SR_register(LPM0_bits+GIE);//低功耗模式0,使能中断
6. HCSR04_Init
USONUD_OUT |= TRIG;
USOUND_DIR |= TRIG;
USOUND_SEL |= ECHO ; //CCI0A
7. Key_Init
P1DIR &=~BIT1;//板载按键s2设为输入
P2DIR &=~BIT1;//板载按键s1设为输入P2REN =BIT1;//上拉电阻
P1REN =BIT1;//上拉电阻P1OUT |=BIT1;
P2OUT |=BIT1;//初始状态为高电平
//低电平触发函数
8. interrupt
// Echo back RXed character, confirm TX buffer is ready first,发送数据之前确定发送缓存准备好
#pragma vector=USCI_A1_VECTOR
__interrupt void USCI_A1_ISR(void)
{switch(__even_in_range(UCA1IV,4)){case 0: //无中断break; // Vector 0 - no interruptcase 2: // Vector 2 - RXIFG 接受中断while (!(UCA1IFG&UCTXIFG)); // USCI_A1 TX buffer ready? UCTXIFG(USCI Transmit Interrupt Flag)UCA1TXBUF = UCA1RXBUF; //等待数据发送完成 完成UCTXIFG置1 跳出循环 // TX -> RXed characterbreak;case 4:break; // Vector 4 - TXIFG 发送中断default: break;}
}
// UCTXIFG=0x02,UCA1IFG&UCTXIFG,当UCA1IFG的UCTXIFG位为1时,说明UCA1TXBUF为空,
//跳出while循环循环;当UCTXIFG位为0时UCA1TXBUF不为空,停在循环。四、项目源码
若需项目源码可留言评论区QQ邮箱 或 私信即可。
着急的小伙伴可直接加好友联系 👇
相关文章:
基于MSP430 红外避障-遥控小车(电赛必备 附项目代码)
文章目录 一、硬件清单二、模块连接三、程序设计四、项目源码 项目环境: 1. MSP430F55292. Code Composer Studio3. 蓝牙调试助手 项目简介: 小车可分为3种工作模式,每种工作模式都会打印在OLED显示屏上,通过按键转换工作模式。 模…...

大型商城系统功能逻辑架构_各大系统关系设计_OctShop
一个商城系统应该具备什么样的功能才算一个合格的网上商城呢,才能满意用户的下单支付,退款退货,售后等需求呢! 商城一般分为三种角色:买家,商家,平台,这三种角色都有各自的功能特点。…...
飞书接入ChatGPT,实现智能化问答助手功能,提供高效的解答服务
文章目录 前言环境列表1.飞书设置2.克隆feishu-chatgpt项目3.配置config.yaml文件4.运行feishu-chatgpt项目5.安装cpolar内网穿透6.固定公网地址7.机器人权限配置8.创建版本9.创建测试企业10. 机器人测试 前言 在飞书中创建chatGPT机器人并且对话,在下面操作步骤中…...
linux并发服务器 —— 多线程并发(六)
线程概述 同一个程序中的所有线程均会独立执行相同程序,且共享同一份全局内存区域; 进程是CPU分配资源的最小单位,线程是操作系统调度执行的最小单位; Linux环境下,线程的本质就是进程; ps -Lf pid&…...

Nginx 部署 配置
一.概述 什么是nginx? Nginx (engine x) 是一款轻量级的Web 服务器 、反向代理服务器及电子邮件(IMAP/POP3)代理服务器。 什么是反向代理? 反向代理(Reverse Proxy)方式是指以代理服务器来接受internet上的连接请求…...

数据结构:时间复杂度和空间复杂度计算
1.什么是时间复杂度和空间复杂度? 1.1算法效率 算法效率分析分为两种:第一种是时间效率,第二种是空间效率。时间效率被称为时间复杂度, 而空间效率被称作空间复杂度。 时间复杂度主要衡量的是一个算法的运行速度,而空间…...

云原生Kubernetes:二进制部署K8S单Master架构(一)
目录 一、理论 1.K8S单Master架构 2. etcd 集群 3.flannel网络 4.K8S单Master架构环境部署 5.部署 etcd 集群 6.部署 docker 引擎 7.flannel网络配置 二、实验 1.二进制部署K8S单Master架构 2. 环境部署 3.部署 etcd 集群 4.部署 docker 引擎 5.flannel网络配置…...
ICCV 2023 | 利用双重聚合的Transformer进行图像超分辨率
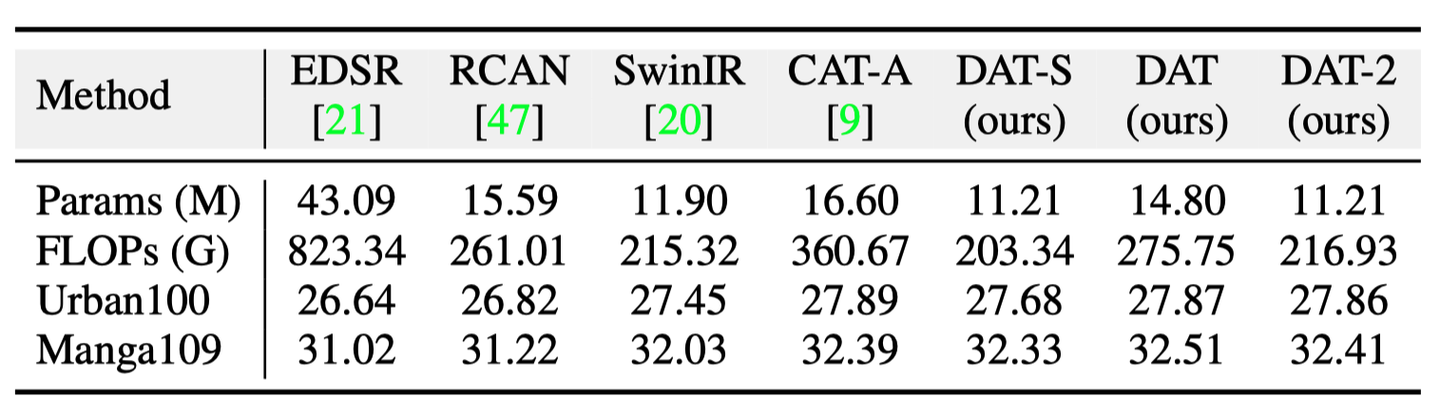
导读 本文提出一种同时利用图像空间和通道特征的 Transformer 模型,DAT(Dual Aggregation Transformer),用于图像超分辨(Super-Resolution,SR)任务。DAT 以块间和块内的双重方式,在空…...
经纬恒润预期功能安全(SOTIF)解决方案为自动驾驶安全保驾护航
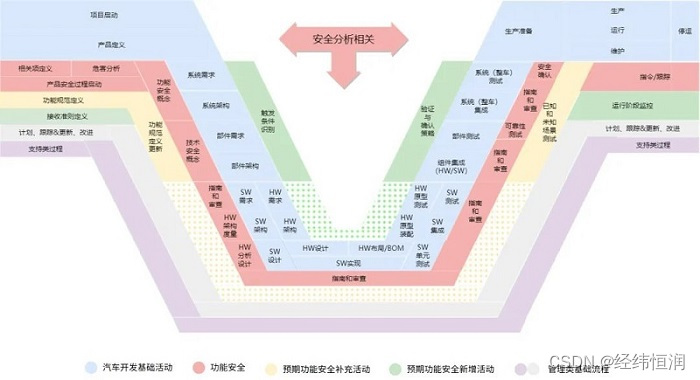
近年来,“安全”被普遍认为是智能驾驶汽车被用户接受或者得到商业应用最大的问题,ISO26262功能安全旨在避免由E/E系统功能失效导致的不可接受的风险,主要是针对系统性失效/随机硬件失效导致的风险进行分析和控制,然而传感器和感知…...
——面向对象)
java从入门到起飞(七)——面向对象
文章目录 一、什么是面向对象1.1 定义1.2 特点 二、面向对象的基础2.1 面向对象的基础是抽象2.2 抽象的作用2.3 类和对象2.4 属性和方法2.5 构造方法 三、面向对象的三大特征3.1 封装3.1.1 封装的意义3.1.2 封装的实现 3.2 继承3.2.1 继承的意义3.2.2 继承的实现 3.3 多态3.3.1…...
题集-三路划分和三数取中(快排优化)
快排排序是非常快的,但是有一种情况快排是无法进行的。 912. 排序数组 - 力扣(LeetCode) 这道题看上去没什么问题,但是如果我们用快排去提交的话,发现快排其实是被针对了的。 有一个样例是这样的。如果我们按照快排的…...
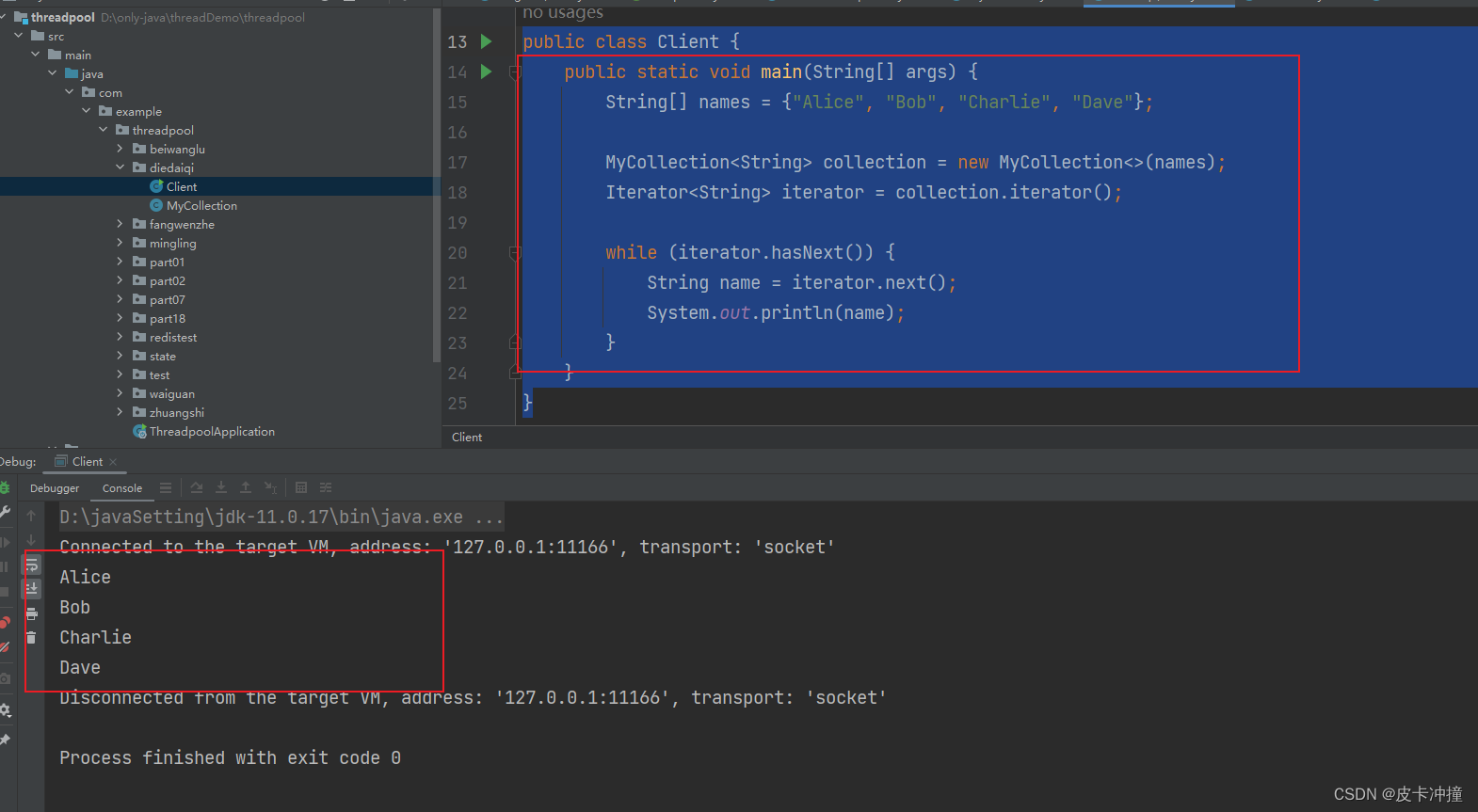
设计模式-迭代器
文章目录 1. 引言1.1 概述1.2 设计模式1.3 迭代器模式的应用场景1.4 迭代器模式的作用 2. 基本概念2.1 迭代器 Iterator2.2 聚合 Aggregate2.3 具体聚合 ConcreteAggregate 3. Java 实现迭代器模式3.1 Java 集合框架3.2 Java 迭代器接口3.3 Java 迭代器模式实现示例 4. 迭代器模…...
Hive常用日期函数)
Hive学习(12)Hive常用日期函数
1、hive返回当天三种方式 select current_date; --返回年月日 --2017-06-15 select current_timestamp; --返回年月日时分秒 --2017-06-15 19:54:44 SELECT from_unixtime(unix_timestamp()); --2017-06-15 19:55:042、from_unixtime:转化unix时间戳到当前时区的时…...
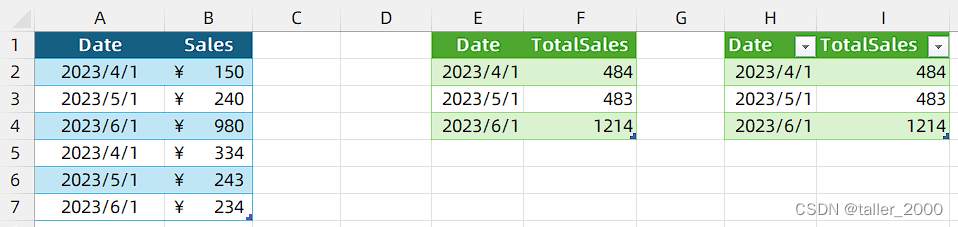
PowerQuery动态加载M公式
Power Query 是Excel中的强大数据处理与转换工具,如果需要“动态”处理数据,大家第一时间想到的是可以使用VBA,利用代码创建M公式,进而创建PQ查询,但是复杂的M公式可能有很多行, 使用VBA处理起来并不是很方…...
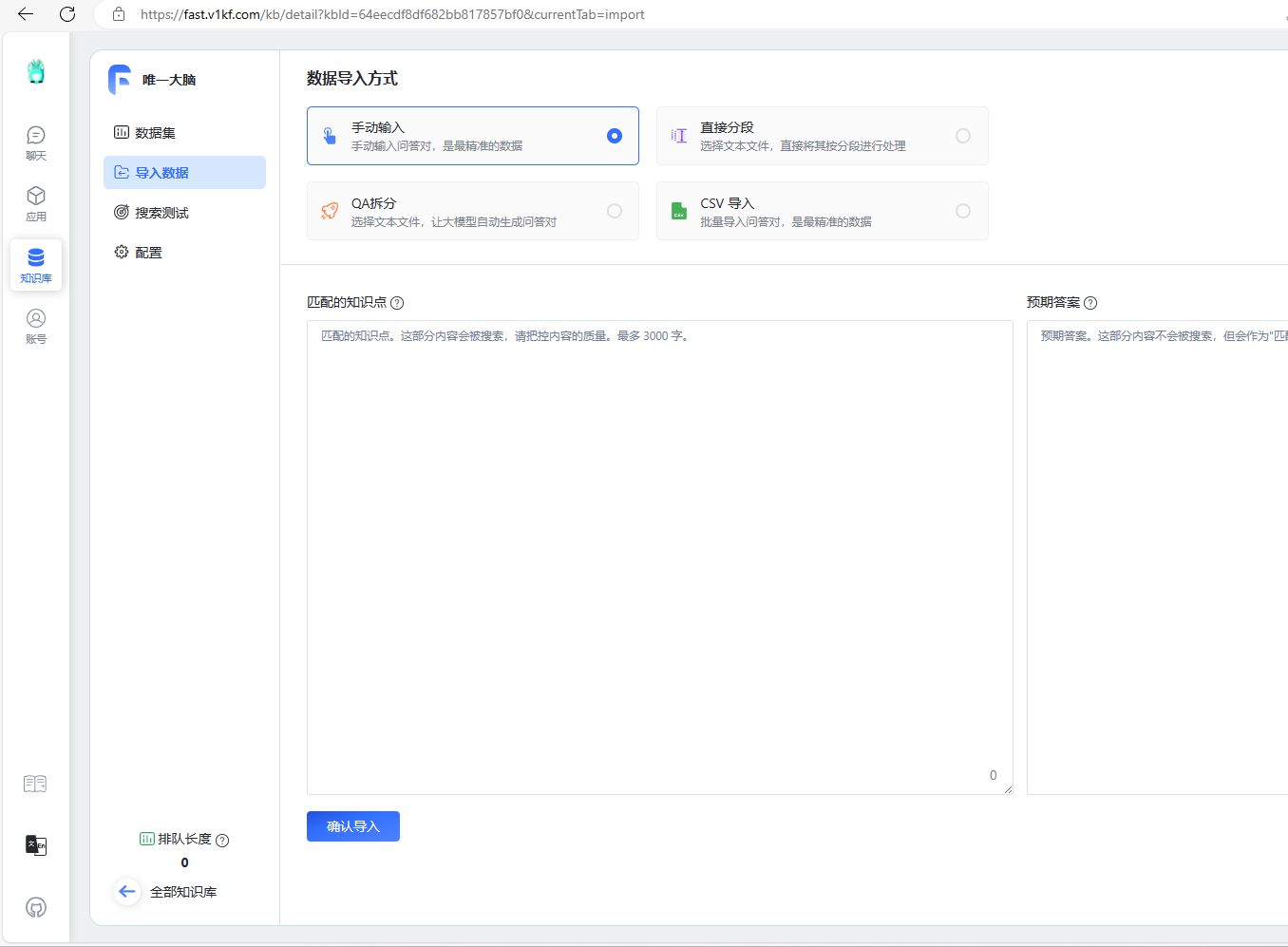
2分钟搭建FastGPT训练企业知识库AI助理(Docker部署)
我们使用宝塔面板来进行搭建,更方便快捷灵活,争取操作时间只需两分钟 宝塔面板下安装Docker 在【软件商店中】安装【docker管理器】【docker模块】即可 通过Docker安装FastGPT 通过【Docker】【添加容器】【容器编排】创建里新增docker-compose.yaml以下…...

TDengine函数大全-字符串函数
以下内容来自 TDengine 官方文档 及 GitHub 内容 。 以下所有示例基于 TDengine 3.1.0.3 TDengine函数大全 1.数学函数 2.字符串函数 3.转换函数 4.时间和日期函数 5.聚合函数 6.选择函数 7.时序数据库特有函数 8.系统函数 字符串函数 TDengine函数大全CHAR_LENGTHCONCATCONCA…...
)
part-02 C++知识总结(类型转换)
一.C常用的类型转换函数 在C中,有几种自带的类型转换函数可以用于不同类型之间的转换。以下是其中一些常用的自带类型转换函数: 1.隐式转换(Implicit Conversion) 数字类型之间的隐式转换,例如将int转换为float、do…...

stable diffusion实践操作-图生图
本文专门开一节写图生图相关的内容,在看之前,可以同步关注: stable diffusion实践操作 正文...

Jtti:Ubuntu18.04如何修改远程ssh端口号
要在Ubuntu 18.04上修改SSH的远程端口号,您需要编辑SSH服务器配置文件并指定新的端口号。以下是具体的步骤: 以root或具有sudo权限的用户登录到您的Ubuntu服务器。 备份SSH配置文件(可选): 在进行任何更改之前&…...
微软表示Visual Studio的IDE即日起开启“退休”倒计时
据了解,日前有消息透露称,适用于 Mac平台的Visual Studio集成开发环境(IDE)于8月31日启动“退休”进程。 而这意味着Visual Studio for Mac 17.6将继续支持12个月,一直到2024年8月31日。 微软表示后续不再为Visual Studio for Mac开发…...
)
Dubbo学习笔记(快速入门)
一、分布式基础1.1 软件架构四大演变演变顺序:单体 → 垂直 → 分布式 → 微服务解释:架构进化本质:为了解决流量变大、代码变多、维护困难。1)单体架构所有模块一个工程,一个jar包,全部本地调用࿱…...
)
EI会议投稿踩坑记:手把手教你搞定PDF Express字体嵌入和合规邮件(附免费工具)
EI会议投稿实战指南:从PDF字体嵌入到合规邮件的全流程解析 第一次向EI/IEEE会议投稿的研究者,往往会在技术环节遭遇意想不到的阻碍。其中PDF格式合规性问题——尤其是字体未嵌入错误——堪称新手"杀手"。本文将带你深入理解字体嵌入原理&#…...

Blender新手必看:别再乱点右上角那个“漏斗”了,详解大纲视图的4个隐藏开关
Blender新手避坑指南:揭秘大纲视图四大开关的实战应用 刚接触Blender时,界面右上角那个不起眼的漏斗图标就像潘多拉魔盒——点开后出现的四个神秘开关(禁用选中、视图隐藏、视图禁用、渲染禁用)让无数新手陷入选择困难。这些看似简…...
)
手把手教你用ZYNQ PS-SPI读写W25Q80 Flash(附Vitis代码与逻辑分析仪调试技巧)
ZYNQ PS-SPI驱动W25Q80 Flash全流程实战与深度调试指南 在嵌入式系统开发中,外部Flash存储器的可靠读写是许多应用的基础需求。Xilinx ZYNQ系列SoC的Processing System(PS)端集成了SPI控制器,可直接连接W25Q80等串行Flash芯片,无需占用宝贵的…...
】)
【Rust + Tauri 2 + TypeScript + Tailwind CSS 4 桌面应用 UI 组件选型深度对比(2026版)】
摘要:随着 Tauri 2 在桌面应用开发领域的快速崛起,开发者面临着一个关键抉择:如何在前端选择最适合的 UI 组件库?本文基于 2026 年最新生态,对 shadcn/ui、Radix UI、Base UI、Mantine、Ant Design、Chakra UI、Headle…...

多目摄像头时间同步实战:用FSYNC信号搞定树莓派+双OV5640的同步曝光
多目摄像头时间同步实战:用FSYNC信号搞定树莓派双OV5640的同步曝光 在机器人视觉和立体成像项目中,双摄像头同步采集图像是许多应用的基础需求。无论是构建双目视觉系统、全景拼接还是运动分析,毫秒级的时间差都可能导致算法失效。我曾在一个…...
的设计思路复用)
从游戏UI到工业HMI:聊聊Qt自定义控件(仪表盘、雷达、摇杆)的设计思路复用
从游戏UI到工业HMI:Qt自定义控件的跨领域设计思维 在数字界面设计领域,游戏UI与工业HMI看似分属两个极端——前者追求炫酷动效与沉浸体验,后者强调信息清晰与操作可靠。但当我们拆解那些优秀的仪表盘、雷达扫描和交互摇杆控件时,会…...

用K210开发板驱动HUB75E点阵屏:从SPI时序到S型排列的完整避坑指南
用K210开发板驱动HUB75E点阵屏:从SPI时序到S型排列的完整避坑指南 在嵌入式开发领域,驱动LED点阵屏一直是兼具挑战性和实用性的课题。当K210这款高性能RISC-V开发板遇上HUB75E接口的大尺寸点阵屏,开发者往往会在SPI时序优化、内存管理和独特的…...

YimMenu技术深度探索:现代GTA V菜单框架的安全架构与扩展机制
YimMenu技术深度探索:现代GTA V菜单框架的安全架构与扩展机制 【免费下载链接】YimMenu YimMenu, a GTA V menu protecting against a wide ranges of the public crashes and improving the overall experience. 项目地址: https://gitcode.com/GitHub_Trending/…...

Perplexity文化新闻搜索效率翻倍:从冷启动到高信噪比输出的7个被低估的底层参数配置
更多请点击: https://codechina.net 第一章:Perplexity文化新闻搜索效率翻倍:从冷启动到高信噪比输出的7个被低估的底层参数配置 Perplexity 的文化新闻检索能力并非仅由模型规模或训练数据量决定,其真实效能高度依赖于七个常被忽…...